Изобретение относится к системам сигнализации и может быть использовано для управления транспортным парком, контроля за состоянием подвижных объектов и их перемещением в реальном масштабе времени, охраны стационарных и мобильных объектов, а также мониторинга окружающей среды.
Изобретение может быть использовано для определения координат мобильных объектов, обработки сигналов от космических аппаратов систем Глонасс и Навстар, отображения карты местности и местоположения объекта на охране телемонитора, определение оптимального маршрута, графического и звукового воспроизведения сопутствующей навигационной информации.
Изобретение относится к системам безопасности, позволяющим на диспетчерском центре получать оперативную информацию о фактах вскрытия контролируемых объектов, определять их местоположение, а также получать изображения угонщика или окружающей местности при работе в режиме мониторинга.
Известна система безопасности, управления и навигации для автомобилей, содержащая запоминающее устройство для хранения дорожных карт в цифровой форме, устройство для ввода пункта назначения, устройство для формирования цифровых сигналов скорости и ускорения автомобиля для индикации аварийной ситуации и антенну для приема сигналов спутниковой системы радиоопределения (GPS) и сигналов, несущих информацию о транспортном потоке и передачи аварийных сигналов (патент США N 5504482, кл. G 08 G 1/123, опубл. 1997). Принятые сигналы преобразуются в цифровую форму. Устройство обработки определяет текущее местоположение автомобиля на основе сигналов GPS и сигналов, несущих информацию о скорости и ускорении, определяет первый маршрут между текущим местоположением и пунктом назначения и второй маршрут при высокой плотности транспортного потока на первом маршруте, передает аварийные сигналы, кодированные с учетом текущего местоположения, если ускорение автомобиля выходит за заданные пределы, и управляет автомобилем с помощью электронных средств. Работа системы ограничена навигацией мобильного объекта, при этом система не позволяет производить высокоточное определение координат в дифференциальном режиме, не обеспечивает звуковое сопровождение навигационной обстановки, контроль исправности системы, сбор и хранение информации о маршруте движения потребителя.
Известен навигационный прибор для транспортного средства, содержащий детектор координат текущей позиции автомобиля или другого транспортного средства, заявка Японии N 5059431, кл. G 09 В 29/10. В соответствии с координатами из детектора на экран индикаторного блока одновременно выводится указатель текущей позиции автомобиля и дорожная карта определенного района. Прибор отличается тем, что в нем имеются память, в которой хранится графическая информация для индикации карты данного района, координаты нескольких специальных точек внутри этого района и информация о маршрутах, соединяющих указанные точки с несколькими целевыми точками района; схема для управления выводом на индикацию карты района, действующая на основании считанной из памяти информации; командная схема для выбора одной из нескольких целевых точек; схема, которая после выбора одной из целевых точек на основании взаимосвязи между координатами текущей позиции автомобиля и хранящимися в памяти координатами специальных точек, определяет специальную точку, находящуюся вблизи текущей позиции и на основе хранящейся в памяти маршрутной информации определяет маршрут, связывающий ближайшую специальную точку с целевой точкой; схема, управляющая индикацией на экране индикаторного блока маршрута, установленного предыдущей схемой. Прибор не позволяет осуществить мониторинг окружающей среды и поиск угнанных транспортных средств. Отсутствует диспетчерский центр, на котором отражается местоположение объектов и их состояние.
Известно автомобильное навигационное устройство, в котором имеются несколько датчиков, контролирующих параметры движения; память, в которой в виде графической информации хранятся карта нужного района и соответствующие этому району виды местности; блок для индикации в обычном режиме карты района; блок управления, который в соответствии с выходными сигналами датчиков при приближении к определенному участку района считывает из памяти и выводит на индикацию соответствующий этому участку вид местности, заявка Японии N 5066595, кл. G 09 В 29/10. Отсутствие в составе устройства телевизионных систем, а также соответствующих датчиков не позволяет осуществлять контроль окружающей среды и передавать информацию на диспетчерский центр.
Известна система безопасности с блоком управления сигнальным устройством для автомобиля, которая содержит счетчик, воспринимающий первый пусковой сигнал от датчиков неразрешенного проникновения или датчиков ударов, и приводит в действие сирену и световое сигнальное устройство для создания коротких звуковых сигналов или мигающих световых сигналов, заявка Англии N 2279792, кл. В 60 R 25/10, опубл. 1996. При этом выдвигается антенна автомобиля, и может быть включен синтезатор речи. Это предостерегает людей от приближения к автомобилю. Главный блок управления сигнальным устройством приводит в действие сигнальную систему после получения заданного числа пусковых сигналов в заданный промежуток времени. Кроме того, предупреждающий сигнал может быть передан на удаленный от автомобиля приемник, например, за счет использования переносного телефона. Возможность передачи видеоизображений угонщика и/или окружающей среды, а также местоположение объектов в заданном техническом решении отсутствует. Система также не обеспечивает автономную навигацию объекта, диспетчерский центр не входит в состав системы, отсутствие бортового компьютера не позволяет использовать различные устройства радиосвязи для обмена информацией, включающей как навигационные параметры, так и видеоизображения.
Наиболее близкой по технической сущности к предлагаемой системе безопасности, навигации и мониторинга является система, которая содержит навигационный приемник с соответствующей антенной, позволяющий принимать сигналы для определения местоположения транспортного средства, группу охранных датчиков, регистрирующих факт проникновения в транспортное средство, передатчик с соответствующей антенной для передачи сигналов тревоги и местоположения объекта на станцию контроля или в полицейское управление, заявка Англии N 2279478, кл. В 60 R 25/10, опубл., 1995. В состав бортового компьютера входит процессор, который через программируемый интерфейс осуществляет управление датчиками безопасности и периферийными устройствами, а также поддерживает установленный режим (статус) охраняемого объекта.
Данная система безопасности не позволяет передавать по радиоканалу изображение угонщика, звуковые сигналы (если потребуется), а также видеокадры, полученные телекамерами, для оценки состояния окружающей среды и контролируемого объекта. Функционирование системы ограничено безопасностью одного транспортного средства, диспетчеризация целого парка средств, а также автономная навигация не предусмотрены.
Задача изобретения - разработка универсальной системы безопасности, навигации и мониторинга, схемное выполнение которой позволяло бы оперативно перепрограммировать и изменять порядок функционирования блоков и всей системы в зависимости от выполняемых ею функций.
Поставленная задача решается тем, что система безопасности, навигации и мониторинга, содержащая аппаратуру потребителя, включающую блок автономного питания и подключенные к нему навигационный приемник с антенной, трансивер с антенной, группу охранных датчиков и бортовой компьютер, содержащий процессор, предназначенный для обработки сигналов от навигационного приемника и охранных датчиков и вырабатывающий информационные сигналы для передачи по радиоканалу, и интерфейс, соединенный с процессором, навигационным приемником и группой охранных датчиков, согласно изобретению дополнительно содержит по меньшей мере один диспетчерский центр, связанный через антенну трансивера посредством радиоканала с аппаратурой потребителя, в которую дополнительно введены аудиосистема и соединенная с интерфейсом бортового компьютера клавиатура, а также подключенные к блоку автономного питания модем, который соединен с интерфейсом и трансивером, телекамера видеоконтроля и телемонитор, входы которого соединены с выходами телекамеры видеоконтроля, при этом бортовой компьютер дополнительно содержит запоминающее устройство, соединенное с интерфейсом, аналого-цифровой преобразователь видеосигналов, вход которого подключен к выходу телекамеры видеоконтроля, а его выход подсоединен к интерфейсу, цифроаналоговый преобразователь аудиосигналов, вход которого соединен с интерфейсом, а его выход подсоединен ко входу аудиосистемы, цифроаналоговый преобразователь видеосигналов, вход которого соединен с интерфейсом, а его выход подсоединен ко входу телемонитора.
Использование в предлагаемой системе диспетчерского центра позволяет осуществлять дистанционный контроль местонахождения и перемещения мобильных объектов, контроль их состояния, централизованное управление движением группы объектов, сбор и хранение данных о движении объектов контроля и их состоянии в течение заданного периода, высокоточный дифференциальный режим определения координат абонентов системы.
Введение в аппаратуру потребителя клавиатуры позволяет потребителю оперативно переводить систему на различные режимы, а также включать при необходимости сигнал тревоги.
Аудиосистема предназначена для выдачи управляющих и информационных звуковых сообщений. В качестве таких сообщений используются фразы о необходимости подготовиться к маневру или выполнению тех или иных действий, связанных с эксплуатацией системы.
Телемонитор служит для отображения навигационной и служебной информации, а именно: для визуализации текущего вектора состояния потребителя, маршрута движения на фоне цифровой карты местности, а также другой служебной информации, к которой относятся направление на текущую путевую точку, время нахождения на маршруте, информация о параметрах функционирования комплекса автономной навигации.
Телекамера позволяет получать изображение угонщика в кризисных ситуациях или изображения окружающей местности вокруг контролируемого объекта.
Введение в бортовой компьютер постоянного запоминающего устройства обеспечивает перезапись и хранение большого количества управляющих программ, значительно расширяющих функциональные возможности предлагаемой системы, а также хранение карт местности в цифровом виде, используемых в режиме автономной навигации. Используемые в бортовом компьютере цифроаналоговые и аналого-цифровые преобразователи видео- и аудиосигналов обеспечивают функционирование телекамеры, телемонитора и аудиосистемы.
Целесообразно, чтобы диспетчерский центр содержал бы подключенные к блоку питания навигационный приемник с антенной, сервер контроля охраняемых объектов и связанный с ним компьютер дифференциальной коррекции координат наблюдаемых объектов, вход которого был бы подключен к выходу навигационного приемника, и по числу наблюдаемых объектов компьютеры средства связи, связанные посредством компьютерной сети с сервером контроля охраняемых объектов, модемы, каждый из которых связан с соответствующим ему компьютером средства связи, и трансиверы, каждый из которых связан с антенной и соответствующим ему модемом.
Такое построение диспетчерского центра обеспечивает не только контроль парка мобильных и стационарных объектов, но и функционирование системы в режиме дифференциальной навигации, значительно повышающем точность определения координат данных объектов. Универсальность предлагаемой системы, обеспечиваемая структурой построения диспетчерского центра и возможность использования радиосредств различного радиуса действия, позволяет организовать с использованием компонентов, входящих в состав предлагаемого изобретения, систему более высокой степени сложности посредством постановки различных групп (парков) контролируемых объектов на контроль в региональные диспетчерские центры, которые, например, по космическим каналам радиосвязи передают ситуационную информацию на глобальный диспетчерский центр, роль которого может выполнять один из региональных диспетчерских центров.
Кроме того, в качестве трансиверов и модемов аппаратуры потребителя и диспетчерского центра используются устройства, реализующие согласно протоколам обмена данными и радиообмена сотовую телефонную радиосвязь, транкинговую радиосвязь и космическую связь. В качестве навигационных приемников аппаратуры потребителя и диспетчерского центра используются приемники, работающие по сигналам космических навигационных систем Глонасс и/или Навстар и обеспечивающие как стандартную, так и геодезическую точность определения координат объектов в зависимости от комплектации.
Согласно изобретению в предлагаемой системе в качестве телекамеры видеоконтроля салона (кабины) транспортного средства и съемки угонщика используется миниатюрная телекамера с объективом pin-hole, для обзора и контроля переднего или заднего пространства мобильного объекта используются соответствующие телекамеры, в качестве телекамеры мониторинга окружающей среды вокруг контролируемых стационарных (мобильных) объектов применяется телекамера кругового обзора на поворотном устройстве или гироплатформе, регистрирующая излучение в видимом и инфракрасном диапазоне длин волн.
Кроме того, предлагаемая система содержит в составе охранных датчиков датчики проникновения или воздействия на охраняемый объект и датчики контроля параметров окружающей среды и технических параметров контролируемого объекта.
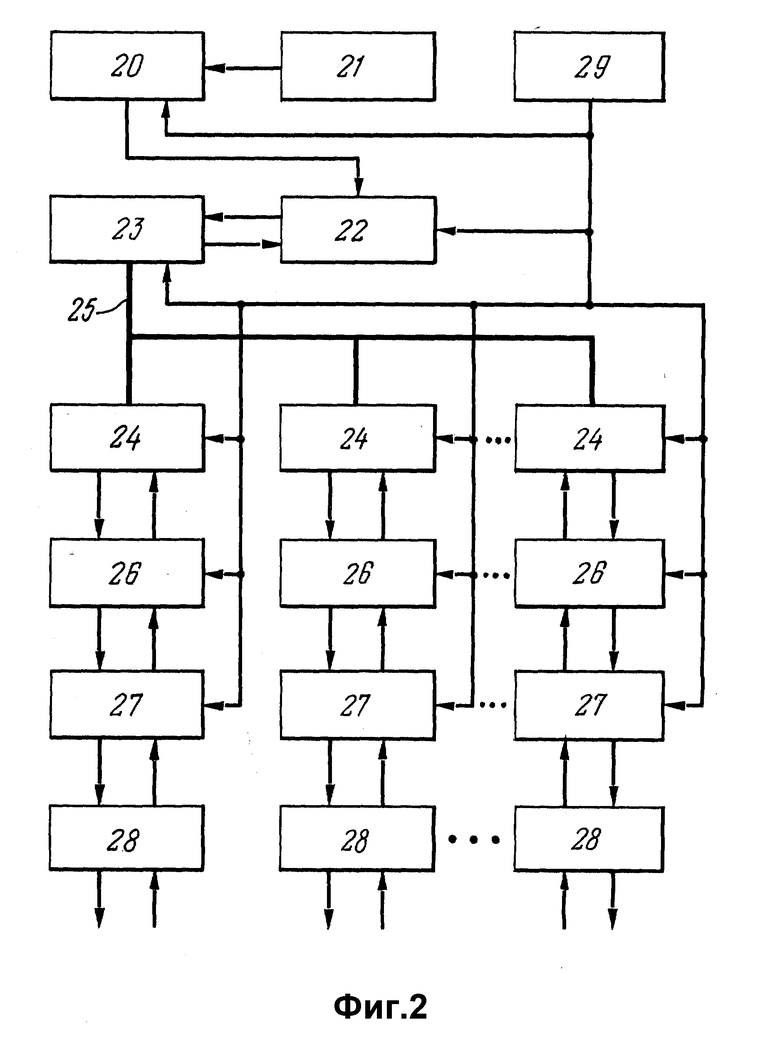
На фиг. 1 изображена блок-схема системы безопасности, навигации и мониторинга; на фиг. 2 - блок-схема диспетчерского центра.
Система безопасности, навигации и мониторинга по изобретению содержит диспетчерский центр 1 (фиг. 1) и аппаратуру потребителя, включающую навигационный приемник 2 с антенной 3, трансивер 4 с антенной 5, через которую диспетчерский центр 1 посредством радиоканала связан с трансивером 4. В состав аппаратуры потребителя входит также бортовой компьютер 6, содержащий интерфейс 7, процессор 8, входы и выходы которого подключены соответственно к выходам и входам интерфейса 7, аналого-цифровой преобразователь 9 видеосигналов, выход которого подключен к соответствующему входу интерфейса 7. Кроме того, бортовой компьютер 6 содержит связанное с интерфейсом 7 запоминающее устройство 10 и подключенные к соответствующим выходам интерфейса 7 цифроаналоговые преобразователь 11 аудиосигналов и преобразователь 12 видеосигналов. Аппаратура потребителя содержит также связанные с интерфейсом 7 группу охранных датчиков 13, клавиатуру 14 и модем 15, связанный с трансивером 4. Кроме этого в состав аппаратуры потребителя входит телекамера 16 видеоконтроля, выход которой подключен ко входу преобразователя 9, аудиосистему 17, соединенную своим входом с выходом преобразователя 11, и телемонитор 18, подсоединенный своими входами соответственно к преобразователю 12 и к телекамере 16 видеоконтроля. Питающие входы навигационного приемника 2, модема 15, трансивера 4, бортового компьютера 6, телекамеры 16, телемонитора 18 и охранных датчиков 13 подключены к блоку 19 автономного питания.
Диспетчерский центр 1 содержит навигационный приемник 20 (фиг. 2) с антенной 21, компьютер 22 дифференциальной коррекции координат наблюдаемых объектов, вход которого подключен к выходу навигационного приемника 20 и который связан с сервером 23 контроля охраняемых объектов.
Диспетчерский центр 1 содержит также по числу объектов компьютеры 24 средства связи, связанные посредством компьютерной сети 25 с сервером 23, модемы 26, каждый из которых связан с соответствующим компьютером 24, и трансиверы 27. Каждый трансивер 27 имеет антенну 28 и связан с соответствующим модемом 26. Питающие входы навигационного приемника 20, компьютера 22, всех компьютеров 24, модемов 26 и трансиверов 27 подсоединены к блоку 29 питания.
Предлагаемая система работает следующим образом.
Рассмотрим порядок работы системы безопасности, навигации и мониторинга в различных режимах. Режим автономной навигации транспортного средства (режим А) включается водителем нажатием соответствующих клавиш клавиатуры 14 (фиг. 1). При этом блок 19 автономного питания подает напряжение на навигационный приемник 2, бортовой компьютер 6, аудиосистему 17, представляющую собой в режиме А звуковые динамики с усилителем промышленного исполнения, телемонитор 18, телекамеру 16.
Кроме того, в более общем случае могут запитываться датчик направления (курса) и датчик пройденного пути, если они установлены на транспортном средстве и входят в состав охранных датчиков 13. Затем при помощи клавиатуры 14 через интерфейс 7 устанавливается тот или иной режим работы процессора 8 бортового компьютера 6, который после включения записывает в оперативную память (фиг. 1 не показана) тот или иной программный блок из запоминающего устройства 10, выполненного, как правило, в виде твердотельного устройств промышленного исполнения или CD/DVD drive. В режиме автономной навигации бортовой компьютер 6, управляемый процессором 8, может решать задачи в режимах: интерфейсного обмена между бортовым компьютером 6 и навигационным приемником 2, обработки навигационной информации, контроля качества решения навигационных задач, отображения навигационной и служебной информации, сбора и хранения в запоминающем устройстве информации о маршруте движения транспортного средства, решения сервисных задач, обработки действий потребителя системы, звукового сопровождения, начальной инициализации и быстрого старта системы, обработки нештатных ситуаций, автономного контроля исправности блоков, функционирующих в режиме А. Логика взаимодействия блоков в основном режиме - отображения навигационной и служебной информации - такова: из навигационного приемника 2, имеющего свою антенну 3, через интерфейс 7 в процессор 8 поступают данные о местоположении транспортного средства, которые посылаются в запоминающее устройство 10, из которого карта участка местности, соответствующего координатам транспортного средства, записывается в оперативное запоминающее устройство процессора 8 и через интерфейс 7 и преобразователь 12 поступает на экран телемонитора 18, где отображается вместе со служебной информацией (курс, скорость, режим работы, текущее время, время нахождения на маршруте, координаты и другие). На экране телемонитора 18 вместе с картой местности отображается местоположение транспортного средства и направление его движения. Бортовой компьютер 6 может строиться на базе известных одноплатных персональных компьютеров промышленного исполнения на процессорах 86 (фирм INTEL, AMD и других). Преобразователь 12 представляет собой выполненный промышленным способом преобразователь цифровых сигналов VGA в телевизионные SECAM (PAL) для отображения на экране телемонитора 18, в качестве которого может использоваться, например для мобильного транспортного средства, автомобильный телевизор типа "Clarion", "Philips".
Также вместо телемонитора 18 могут использоваться любые типы компьютерных мониторов, а также жидкокристаллические и электролюминисцентные панели.
Одновременно сопутствующая навигационная информация дополнительно к визуальной форме дублируется аудиосистемой 17 голосом, который преобразуется из цифрового сигнала, поступающего из процессора 8 через интерфейс 7 на преобразователь 11, представляющий собой аудиоплату для персонального компьютера промышленного исполнения, совместимую со стандартом Sound Blaster.
Одновременно с отображением на экране телемонитора 18 местоположения транспортного средства и служебной информации при срабатывании соответствующих клавиш клавиатуры 14 через интерфейс 7 в процессор 8 поступает сигнал о включении режима записи и хранения пройденного маршрута. При этом в режиме А информация о местоположении транспортного средства с привязкой ко времени поступает в запоминающее устройство 10, где она хранится и по запросу с клавиатуры 14 может быть выдана через интерфейс 7 как на телемонитор 18, так и на периферийные средства (входят в состав системы функционально). Из процессора 8 в запоминающее устройство 10 для запоминания и хранения может также поступать информация о параметрах функционирования системы в режиме А.
Рассмотрим функционирование системы в режиме А при решении задач высокоточной навигации в дифференциальном режиме. Заявка на работу в дифференциальном режиме выдается клавиатурой 14, при этом процессор 8 через интерфейс 7 выдает команду на модем 15 и трансивер 4 на включение и подключение к блоку 19 автономного питания. Запрос о передаче дифференциальных поправок на диспетчерский центр 1 поступает из процессора 8 через интерфейс 7, модем 15, трансивер 4, антенну 5 и затем принимается в диспетчерском центре 1 трансивером 27 (фиг. 2), имеющим соответствующую антенну 28, и через модем 26, компьютер 24 средства связи подается в сервер 23. Предполагается, что диспетчерский центр 1 в это время уже был запитан из блока 29 питания и находится в готовности к приему и передаче информации. По приходу запроса на работу в дифференциальном режиме сервер 23 контроля объектов выдает команду на компьютер 22 дифференциальной коррекции о подготовке дифференциальных поправок на основе обработки навигационных сигналов, поступающих в компьютер 22 дифференциальной коррекции с выхода навигационного приемника 20 диспетчерского центра 1, имеющего собственную антенну 21. Далее информация о дифференциальных поправках из компьютера 22 дифференциальной коррекции поступает в сервер 23, откуда через компьютер 22 средства связи, модем 26, трансивер 27 и антенну 28 сигналы, несущие информацию о дифференциальных поправках, передаются по радиоканалу на антенну 5 (фиг. 1) трансивера 4 абонента, принимаются трансивером 4 и через модем 15, интерфейс 7 поступают в процессор 8 для совместной обработки с информацией, поступающей от навигационного приемника 2 аппаратуры потребителя.
В составе как аппаратуры потребителя, так и диспетчерского центра 1 в качестве модемов 15 и 26, трансиверов 4 и 27, антенн 5 и 28 применяются известные устройства промышленного исполнения, реализующие: а) телефонную сотовую связь, б) транкинговую радиосвязь или в) космическую радиосвязь, что обеспечивает большую универсальность применения, чем при ограничении, связанном с использованием одного вида связи. В качестве навигационного приемника 2 и 20 аппаратуры потребителя и диспетчерского центра 1 используются известные образцы навигационных приемников, принимающих сигналы как с космических аппаратов системы Глонасс, так и системы Навстар, а также навигационные приемники, обеспечивающие геодезическую точность местоопределения. Кроме того, в составе диспетчерского центра 1 в качестве компьютера 22 (фиг. 2), компьютеров 24 средств связи и сервера 23 используются известные компьютеры класса 86 или компьютеры, не уступающие по функциональным возможностям компьютерам 86.
Другой режим, который реализуется предлагаемой системой, - режим безопасности (режим Б). Режим Б инициализируется нажатием соответствующих клавиш клавиатуры 14 (фиг. 1) и подачи напряжения питания из блока 19 на интерфейс 7, процессор 8, запоминающее устройство 10 и преобразователь 9 бортового компьютера 6, навигационный приемник 2, модем 15 и трансивер 4, телекамеру 16 видеоконтроля, а также на те охранные датчики 13, которые требуют электрического питания, при этом транспортное средство становится на охрану. Сигнал о том, что данный абонент поставлен на охрану, формируется процессором 8 и через интерфейс 7, модем 15, трансивер 4, антенну 5 и далее по радиоканалу поступает на диспетчерский центр 1, а именно на антенну 28 (фиг. 2) трансивера 27 под номером m (где m - номер данного абонента, который хранится в памяти сервера 23), далее через трансивер 27, модем 26 и компьютер 24 на вход сервера 23, который приобщает номер m к списку объектов, находящихся а режиме охраны.
Нейтрализация срабатывания охранных датчиков 13 обеспечивается набором хозяином транспортного средства соответствующего кода на клавиатуре 14. При совпадении набранного кода с кодом, хранящимся в памяти компьютера 6, процессор 8 выдает сигнал о снятии с охраны данного абонента, который через интерфейс 7, модем 15, трансивер 4 и антенну 5, далее по радиоканалу поступает в диспетчерский центр 1.
При несанкционированном вскрытии транспортного средства и срабатывании датчиков 13 по команде процессора 8 сигнал активации поступает через интерфейс 7 из бортового компьютера 6 в навигационный приемник 2, последний начинает вырабатывать сигналы, несущие информацию о местоположении транспортного средства, которые через интерфейс 7 поступают для обработки в процессор 8. Одновременно телекамера 16 видеоконтроля начинает формировать изображение угонщика, которое преобразуется с помощью преобразователя 9 в цифровую информацию, передаваемую через интерфейс 7 в процессор 8, где подвергается сжатию (например, методом Вейвлет-преобразования) и разбивается на фреймы. Затем с заданным периодом, согласованным со скоростью передачи информации по радиоканалу, информационные сообщения, содержащие навигационную информацию и фреймы изображения, передаются через интерфейс 7, модем 15, трансивер 4, антенны 5 и 28, трансивер 27, модем 26, компьютер 24 в сервер 23 диспетчерского центра 1, на экране монитора (на фиг. 2 не показан) которого изображаются следующие данные: местоположение транспортного средства, направление и скорость перемещения, данные технического паспорта, данные о владельце, изображение угонщика и другие необходимые данные.
Для обеспечения сохранения ресурса аккумуляторов блока 19 автономного питания все блоки аппаратуры потребителя, за исключением охранных датчиков 13, в режиме Б находятся в выключенном состоянии и включаются при срабатывании реле (на фиг. 1 не показано), входящего в состав блока 19 автономного питания, в моменты постановки и снятии с режима хранения, а также при наступлении экстремальной ситуации угона и поиска транспортного средства.
В качестве телекамеры 16 видеоконтроля в режиме Б может использоваться известная, как правило широкоугольная, миниатюрная камера внутреннего наблюдения с объективом типа pin-hole.
Режим видеонаблюдения (режим В) или мониторинга окружающей среды обеспечивается установкой в качестве телекамеры 16 (фиг. 1) видеоконтроля аппаратуры потребителя одной из следующего перечня видеокамер промышленного исполнения: телекамера переднего (заднего) обзора пространства вокруг мобильного (стационарного) объекта контроля; стационарная (мобильная) телекамера кругового обзора видимого или инфракрасного диапазона длин волн на поворотном устройстве или телекамера на гироплатформе видимого и инфракрасного диапазона длин волн для установки в основном на мобильных наземных (воздушных) объектах контроля или мобильных наземных (воздушных) средствах контроля окружающей среды.
Режим В включается набором соответствующих клавиш клавиатуры 14, при этом подается питание от блока 19 автономного питания на интерфейс 7, процессор 8 и преобразователь 9 бортового компьютера 6, модем 15, трансивер 4. Телекамера 16 видеоконтроля начинает формировать изображение окружающей среды, которое преобразователем 9 трансформируются в цифровые сигналы и через интерфейс 7 поступают в процессор 8, где сжимаются методом Вейвлет-преобразования, разбивается на фреймы и затем по частям через интерфейс 7, модем 15, трансивер 4, антенны 5 и 28, трансивер 27, модем 26, компьютер 24 поступают в сервер 23, который по заданной программе обрабатывает и хранит снимки местности, а также отображает изображение на экране монитора.
Предлагаемая система имеет возможность в режиме В наряду с изображением местности передавать на приемные устройства диспетчерского центра 1 координаты объекта контроля (аналогично режиму Б). Это особенно важно в случае использования предлагаемой системы в передвижных наземных или летающих экологических лабораториях.
Таким образом, описанные выше основные свойства и режимы работы предлагаемой системы позволяют использовать данное изобретение широкому кругу пользователей - от владельцев транспортных средств до частных и государственных учреждений и организаций, осуществляющих охрану и обеспечивающих безопасность стационарных и мобильных особо важных объектов, контролировать их состояние и исправное функционирование, а также состояние окружающей среды и ее экологической чистоты. Важнейшей особенностью предлагаемого технического решения является наличие компьютеров и их элементов как в составе диспетчерского центра 1, так и в составе аппаратуры потребителя, что позволяет оперативно перепрограммировать и изменять порядок функционирования блоков и всей системы, чем еще больше может быть расширена сфера применения изобретения.
Преимущество предлагаемой системы по сравнению с аналогами, в том числе и с прототипом, заключается в повышенной функциональной надежности и эффективности, а также расширении функциональных возможностей при решении задач безопасности, навигации и мониторинга.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 2001 |
|
RU2196358C2 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| СИСТЕМА МОНИТОРИНГА ПОДВИЖНЫХ РЕКЛАМНЫХ ОБЪЕКТОВ | 2004 |
|
RU2279139C2 |
| СИСТЕМА КОНТРОЛЯ, НАВИГАЦИИ И МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2004 |
|
RU2268175C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |
| АВТОМОБИЛЬНЫЙ ПРОТИВОУГОННЫЙ КОМПЛЕКС С ОПРЕДЕЛЕНИЕМ ГЕОГРАФИЧЕСКИХ КООРДИНАТ | 2006 |
|
RU2333853C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ОБЪЕКТОВ | 2014 |
|
RU2585991C2 |
| СИСТЕМА ОХРАНЫ, ЗАЩИТЫ И МОНИТОРИНГА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2250844C1 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2279714C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
Изобретение относится к системам сигнализации и может быть использовано для управления транспортным парком, контроля за состоянием подвижных объектов и их перемещением в реальном масштабе времени, охраны стационарных и мобильных объектов, а также мониторинга окружающей среды. Техническим результатом является создание универсальной системы безопасности, навигации и мониторинга, схемное выполнение которой позволяло бы оперативно перепрограммировать и изменять порядок функционирования блоков и всей системы в зависимости от выполняемых ею функций. Система содержит диспетчерский центр и аппаратуру потребителя, включающую навигационный приемник с антенной, трансивер с антенной, клавиатуру и модем, связанный с трансивером, телекамеру видеоконтроля, аудиосистему и телемонитор, в систему входит бортовой компьютер, связанный с процессором, аналого-цифровым преобразователем видеосигналов, цифроаналоговыми преобразователями аудиосигналов и видеосигналов, запоминающее устройство, телекамера видеоконтроля и телемонитор. К интерфейсу бортового компьютера подключены также охранные датчики. Диспетчерский центр связан с аппаратурой потребителя через антенну трансивера посредством радиоканала. Питающие входы навигационного приемника, модема, трансивера, бортового компьютера, телекамеры видеоконтроля, телемонитора и охранных датчиков подключены к блоку автономного питания. 16 з. п.ф-лы, 2 ил.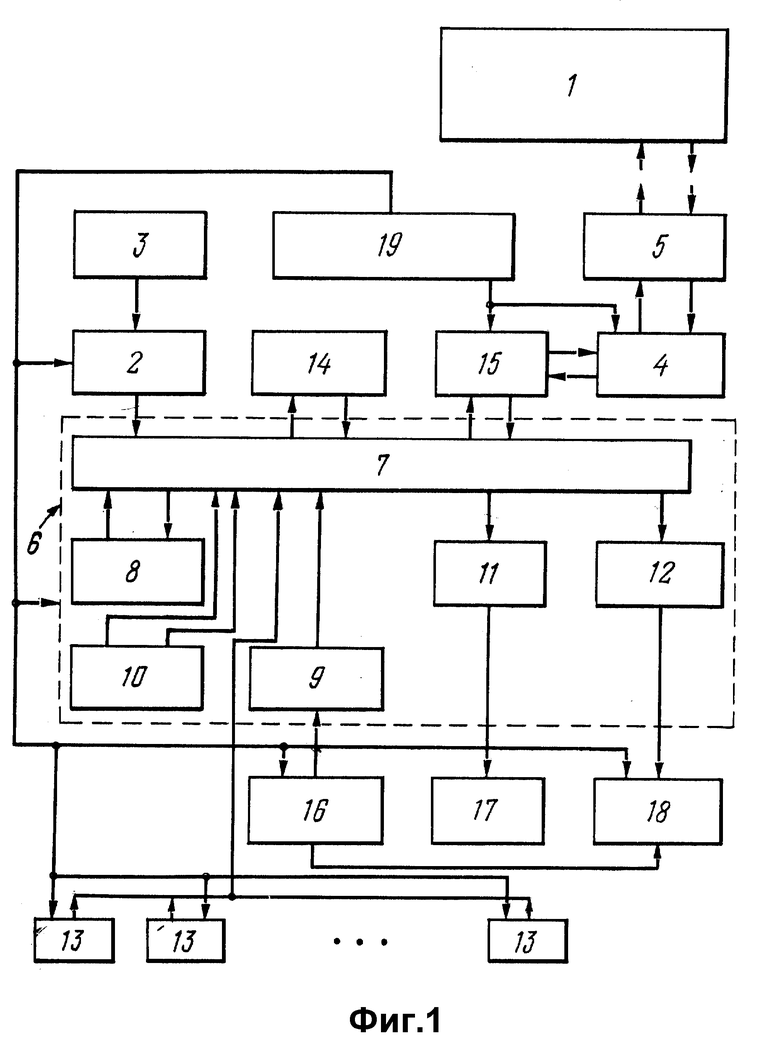
| US 5504482 A, 02.04.96 | |||
| JP 05059431 B4, 31.08.93 | |||
| Установка для исследования масляной пленки в цилиндре двигателя внутреннего сгорания | 1973 |
|
SU506695A1 |
| ЦЕНТРОБЕЖНЫЙ ВЕНТИЛЯТОР | 2004 |
|
RU2279792C2 |
| Блек Ю, Сети ЭВМ, Протоколы, стандарты, интерфейсы, М., МИР, 1990 | |||
| Информационный бюллетень, ГИС-ассоциация, N 1, 1996, c.54-56 | |||
| ФАКТОРЫ, ДЕЙСТВУЮЩИЕ НА АКТИВНОСТЬ ФЕРМЕНТА, ВЫСВОБОЖДАЮЩЕГО РЕЦЕПТОР ФАКТОРА НЕКРОЗА ОПУХОЛЕЙ | 1999 |
|
RU2279478C2 |
| US 5648770 A, 15.07.97 | |||
| RU 94020107 A1, 27.05.96 | |||
| Собиратель для флотационного извле-чЕНия глиНиСТыХ шлАМОВ изКАлийСОдЕРжАщиХ Руд | 1979 |
|
SU810286A1 |
| WO 9736771 A1, 09.10.97 | |||
| RU 94039171 A1, 10.09.96. | |||

