Изобретение относится к системам охранной сигнализации и может быть использовано для контроля за состоянием подвижных объектов и их перемещением в реальном масштабе времени, охраны стационарных и подвижных объектов, а также мониторинга окружающей среды.
Известна система мониторинга, информационного обслуживания и охраны транспортных средств от несанкционированного воздействия (патент RU №2155684, B 60 R 25/00, G 08 B 25/10, G 08 G 1/123, 05.04.2000), содержащая телефонную сеть связи и передачи данных, подключенную к пейджинговой сети связи, содержащей операторский блок передачи данных и установленные на транспортных средствах абонентские приемники, выполненные с возможностью активации иммобилайзеров и запуска передатчиков маячкового типа при срабатывании датчиков несанкционированного воздействия на объект или при приеме по пейджинговой сети связи блокирующего и маячкового кодов соответственно, а также территориально распределенные на улично-дорожной сети стационарные приемопередатчики, выполненные с возможностью приема сигналов тревоги от передатчиков маячкового типа и с возможностью передачи сообщений, по крайней мере, на одну из базовых станций, связанных с информационным центром, содержащим последовательно включенные блок приема и блок первичной обработки, выходы которого подключены соответственно к блоку регистрации и к блоку отображения, при этом стационарные приемопередатчики выполнены с возможностью пеленгации передатчиков маячкового типа и измерения мощностей принимаемых от них сигналов, а информационный центр содержит блок приема и обработки сообщений из внешних источников, блок передачи информационных сообщений, блок вторичной обработки, подключенный к выходам блока первичной обработки, блока регистрации, блока отображения и блока приема и обработки сообщений из внешних источников и выполненный с возможностью определения координат транспортных средств по совокупности данных о местоположении стационарных приемопередатчиков, принявших от передатчиков маячкового типа сигналы тревоги, а также с возможностью определения и учета количества включений передатчика маячкового типа для осуществления финансовых расчетов с владельцем транспортного средства, блок передачи информационных сообщений через формирователь голосовых сообщений подключен к территориально распределенной сети центров оперативного реагирования, при этом владельцы транспортных средств снабжены транспондерными карточками (ТК), на которых в определенных полях нанесены секретные коды: блокирующий, маячковый и расчетный, а в цифровой памяти ТК зафиксирован идентификационный код абонента системы, на каждом транспортном средстве в узле управления иммобилайзером установлены блок дистанционного считывания идентификационного кода с ТК и блок ручного ввода разблокирующего кода, связанные с соответствующими входами узла управления иммобилайзером, а также индикатор режимов работы охранных датчиков, связанный с соответствующим его выходом.
Недостатком указанной системы является невысокая точность определения координат контролируемых подвижных объектов, существенно ограничивающая область практического применения системы и вынуждающая в ряде случаев, например при поиске и перехвате угнанных транспортных средств, использовать дополнительные пеленгационные устройства, устанавливаемые совмесгно с наземными ретрансляторами и/или на борту поисковых транспортных средств (патрульных автомобилей).
Этот недостаток устраняется в системах данного типа, использующих аппаратуру спутниковых радионавигационных систем: американской - NAVSTAR (GPS) и/или российской - ГЛОНАСС.
Так, известна система безопасности, управления и навигации для автомобилей, содержащая запоминающее устройство для хранения дорожных карт в цифровой форме, устройство для ввода пункта назначения, устройство для формирования цифровых сигналов скорости и ускорения автомобиля для индикации аварийной ситуации и антенну для приема сигналов спутниковой радионавигационной системы GPS и сигналов, несущих информацию о транспортном потоке и передачи аварийных сигналов (патент US №5504482, G 08 G 1/123, 02.04.1996). Принятые сигналы преобразуют в цифровую форму. Устройство обработки определяет текущее местоположение автомобиля на основе сигналов GPS и сигналов, несущих информацию о скорости и ускорении, определяет первый маршрут между текущим местоположением и пунктом назначения и второй маршрут при высокой плотности транспортного потока на первом маршруте, передает аварийные сигналы, кодированные с учетом текущего местоположения, если ускорение автомобиля выходит за заданные пределы, и управляет автомобилем с помощью электронных средств.
Работа этой системы ограничена навигацией мобильного объекта, при этом система не позволяет производить высокоточное определение координат в дифференциальном режиме, не обеспечивает звуковое сопровождение навигационной обстановки, контроль исправности технических средств системы, сбор и хранение информации о маршруте движения потребителя.
Известен навигационный прибор для транспортного средства, содержащий детектор координат текущей позиции автомобиля или другого транспортного средства (патент Японии №5059431, G 09 B 29/10). В соответствии с координатами из детектора, на экран индикаторного блока одновременно выводится указатель текущей позиции автомобиля и дорожная карта определенного района. В приборе имеются: память, в которой хранится графическая информация для индикации карты данного района, координаты нескольких специальных точек внутри этого района и информация о маршрутах, соединяющих указанные точки с несколькими целевыми точками района, схема для управления выводом на индикацию карты района, действующая на основании считанной из памяти информации, командная схема для выбора одной из нескольких целевых точек, схема, которая после выбора одной из целевых точек на основании взаимосвязи между координатами текущей позиции автомобиля и хранящимися в памяти координатами специальных точек определяет специальную точку, находящуюся вблизи текущей позиции и на основе хранящейся в памяти маршрутной информации определяет маршрут, связывающий ближайшую специальную точку с целевой точкой, схема, управляющая индикацией на экране индикаторного блока маршрута, установленного предыдущей схемой.
Прибор, однако, не позволяет осуществлять мониторинг окружающей среды и поиск угнанных транспортных средств. Отсутствует диспетчерский центр, на котором отражалось бы местоположение объектов и их состояние.
Также известна система безопасности, навигации и мониторинга (патент RU №2122239, G 08 B 25/10, 20.11.1998), которая содержит аппаратуру потребителя, состоящую из блока автономного питания и подключенных к нему приемника спутниковой радионавигационной системы GPS/ГЛОНАСС с антенной, трансивера с антенной, группы охранных датчиков и бортового компьютера, содержащего процессор, предназначенный для обработки сигналов от навигационного приемника и охранных датчиков и выработки информационных сигналов для передачи по радиоканалу, интерфейс, соединенный с процессором, навигационным приемником и группой охранных датчиков, и, по меньшей мере, один диспетчерский центр, выполненный с возможностью дифференциальной коррекции координат контролируемых объектов и связанный через антенну трансивера посредством радиоканала с аппаратурой потребителя, аудиосистему и соединенный с интерфейсом бортового компьютера блок ручного ввода данных, а также подключенные к блоку автономного питания модем, который соединен с интерфейсом и трансивером, телекамеру видеоконтроля и телемонитор, вход которого соединен с одним из выходов телекамеры видеоконтроля, при этом бортовой компьютер содержит запоминающее устройство, соединенное с интерфейсом, аналого-цифровой преобразователь видеосигналов, вход которого подключен к второму выходу телекамеры видеоконтроля, а выход - к одному из входов интерфейса, и два цифроаналоговых преобразователя, входы которых соединены с соответствующими выходами интерфейса, а выходы соответственно с аудиосистемой и со вторым входом телемонитора.
Однако это техническое решение также имеет недостатки, основными из которых являются:
отсутствие в нем технических средств противодействия несанкционированному воздействию на объект, например средств противодействия краже или угону автомобиля;
невозможность опознавания системой владельца объекта по типу "свой-чужой" и блокирования движения объекта в случае несанкционированного проникновения в него злоумышленника.
Наиболее близкой к заявляемой системе по принципу действия и технической реализации является система безопасности, навигации и мониторинга транспортных средств по авторскому свидетельству RU №2175920, МПК7 B 60 R 25/00, G 08 25/10, заявлено 17.04.2001, опубликовано 20.11.2001 г., содержащая аппаратуру потребителя, включающую в себя навигационный приемник сигналов GPS с антенной, работающий по сигналам спутниковых радионавигационных систем и обеспечивающий, в том числе, геодезическую точность определения координат объектов, трансивер с антенной, реализующий сотовую, транкинговую либо спутниковую радиосвязь с диспетчерским центром, выполненным с возможностью дифференциальной коррекции координат контролируемых объектов и отображения их местоположения и идентификационных параметров на электронной карте-схеме местности, бортовой компьютер, содержащий интерфейс, процессор, запоминающее устройство, аналого-цифровой преобразователь и два цифроаналоговых преобразователя, выходы которых подключены соответственно к входу аудиосистемы и к первому входу телемонитора, второй вход которого подключен к первому выходу телекамеры видеоконтроля, второй выход которой соединен через аналогово-цифровой преобразователь с соответствующим входом интерфейса, один из выходов которого связан с управляющим входом навигационного приемника, выход которого подключен к одному из входов интерфейса, а также набор охранных датчиков, в качестве которых используются датчики несанкционированного воздействия на охраняемый объект, датчики контроля параметров окружающей среды и технических параметров охраняемого объекта, модем, реализующий в зависимости от типа используемой радиосвязи протоколы обмена данными сотовой, транкинговой либо спутниковой сетей связи, первый вход которого соединен с одним из выходов интерфейса, а первый выход - с входом трансивера, второй вход модема связан с соответствующим выходом интерфейса, а второй выход - с входом трансивера, а также блок ручного ввода данных, выход которого связан с соответствующим входом интерфейса, один из выходов которого связан с процессором, а другой выход - с запоминающим устройством, при этом выходы процессора и запоминающего устройства подключены к соответствующим входам интерфейса, абонентский приемник, входящий в состав пейджинговой сети связи общего пользования, вход которого по радиоэфиру соединен с операторским блоком передачи данных, входящим в состав пейджинговой сети связи общего пользования, а выход - соединен с входом интерфейса, блок дистанционного считывания с антенной, выполненный с возможностью считывания идентификационного кода, зафиксированного в цифровой памяти ТК, первый выход которого связан с входом интерфейса, индикатор режимов работы охранных датчиков, первый вход которого связан с вторым выходом блока дистанционного считывания, а второй вход - с выходом интерфейса, и узел блокирования функциональных органов охраняемого объекта, вход которого соединен с выходом интерфейса.
В данной системе безопасности, навигации и мониторинга транспортных средств осуществляется противодействие несанкционированному воздействию на объект, например, угону или краже, техническими средствами, а также опознание системой владельца транспортного средства по типу "свой-чужой" и блокирование функциональных органов объекта в случае проникновения в него злоумышленника.
Недостатком системы-прототипа является относительно невысокая надежность функционирования системы, обусловленная:
- обязательным условием нахождения подвижного объекта в зоне обслуживания пейджинговой сети связи общего пользования, в противном случае абонентский приемник не сможет принять команду от операторского блока передачи данных и, следовательно, аппаратура потребителя будет не управляемой;
- обязательным условием нахождения подвижного объекта в зоне обслуживания либо сотовой, либо транкинговой, либо спутниковой, либо другой системы связи, иначе при срабатывании охранных датчиков после несанкционированного воздействия на объект и запуска системы, сформированные информационные сообщения, содержащие координаты подвижного объекта и кадры видеоизображения будут передаваться в эфир трансивером соответствующего вида связи, но не будут приняты диспетчерским центром, в котором происходит сбор и обработка информации, и соответственно переданы сообщения управления и дифференциальной коррекции координат, что приводит к снижению надежности функционирования системы;
- отсутствием возможности обратной связи с владельцем подвижного объекта, например, транспортного средства.
Невозможность выполнения указанных выше условий обусловлена замиранием и многолучевым распространением радиосигнала в различных условиях, например: города с высокими и невысокими застройками, сельские местности, загородные автомобильные трассы и т.д.
Возможности системы-прототипа обеспечиваются во многом благодаря разнообразию и высоким техническим параметрам бортовой аппаратуры потребителя. Соответственно, высока и стоимость этой аппаратуры, поэтому указанные выше недостатки в значительной степени ограничивают область ее практического применения.
Целью изобретения является повышение надежности функционирования системы безопасности, навигации и мониторинга подвижных объектов. Заявленная система расширяет арсенал средств данного назначения.
Поставленная цель достигается тем, что в известной системе безопасности, навигации и мониторинга транспортных средств, содержащей приемник (блок) дистанционного считывания кода с антенной, принимающей сигналы от транспондерной карточки (ТК), первый и второй информационные выходы которого подключены соответственно к первому входу шины обмена данных (интерфейса) и первому входу индикатора режимов работы охранных датчиков, второй вход которого подключен к первому выходу шины обмена данных, спутниковый навигационный приемник сигналов GPS с антенной, управляющий вход и информационный выход которого подключены соответственно к второму выходу и второму входу шины обмена данных (интерфейса), блок ручного ввода данных, выход которого подключен к третьему входу шины обмена данных (интерфейса), модем, первые информационные выход и вход которого подключены соответственно к четвертому входу и третьему выходу шины обмена данных (интерфейса), управляющий контроллер, первая, вторая, третья шины которого подключены соответственно к пятому, шестому и седьмому входам шины обмена данных (интерфейса), блокиратор (блок блокирования) функциональных органов охраняемого объекта, вход которого подключен к четвертому выходу шины обмена данных (интерфейса), M≥1 охранных датчиков, выходы которых объединены и подключены к восьмому входу шины обмена данных (интерфейса), телекамеру, выход которой подключен к входу аналого-цифрового преобразователя видеосигналов, выход которого подключен к девятому входу шины обмена данных (интерфейса), электроакустический преобразователь (звуковая система), вход которого подключен к выходу цифро-аналогового преобразователя аудиосигналов, вход которого подключен к пятому выходу шины обмена данных (интерфейса), дополнительно введены спутниковый трансивер с антенной, сотовый трансивер с антенной, блок оптимального сложения и делитель мощности. Выходы спутникового и сотового трансиверов подключены соответственно к первому и второму входам блока оптимального сложения. Выход блока оптимального сложения подключен к второму входу модема, второй выход которого подключен к входу делителя мощности. Первый и второй выходы делителя мощности подключены соответственно к входам спутникового и сотового трансиверов. Диспетчерский центр снабжен абонентским входом, первый и второй высокочастотные входы диспетчерского центра подключены к выходам антенн соответственно спутниковой и сотовой связи.
Управляющий контроллер состоит из процессора, постоянного запоминающего устройства, оперативного запоминающего устройства, причем выходные шины процессора постоянного и оперативного запоминающих устройств являются соответственно первой, второй и третьей шинами управляющего контроллера.
Диспетчерский центр состоит из источника бесперебойного питания, выход которого подключен к питающим входам спутникового и сотового трансиверов, первого и второго модемов, сервера контроля охраняемых объектов, компьютера дифференциальной коррекции координат, спутникового навигационного приемника сигналов GPS, сервера базы данных, маршрутизатора, коммутатора, K≥1 автоматизированных рабочих мест диспетчера, автоматизированного рабочего места технолога, K≥1 элементов двусторонней связи. Первый выход i-го, где i=1, 2, 3 ... K, элемента двусторонней связи подключен к i-му входу коммутатора, а второй выход i-го элемента двусторонней связи подключен к входу i-го автоматизированного рабочего места диспетчера. Информационные выходы автоматизированного рабочего места технолога, сервера базы данных и K≥1 автоматизированных рабочих мест диспетчера объединены и подключены через локальную компьютерную сеть к первому входу маршрутизатора. Второй информационный вход и выход маршрутизатора подключены соответственно к первым информационным выходу и входу сервера контроля охраняемых объектов. Вторые информационные вход и выход сервера контроля охраняемых объектов подключены соответственно к первым информационным выходу и входу компьютера дифференциальной коррекции координат. Вторые информационный вход и выход компьютера дифференциальной коррекции координат подключены соответственно к первым информационным выходу и входу спутникового навигационного приемника сигналов GPS, высокочастотный вход которого подключен к выходу антенны навигационного приемника. Третьи информационные вход и выход сервера контроля охраняемых объектов подключены соответственно к первым выходу и входу шины обмена данных. Вторые и третьи входы и выходы которой подключены к первым информационным выходам и входам соответственно первого и второго модемов. Вторые информационные входы и выходы модемов подключены соответственно к первым информационным выходам и входам спутникового и сотового трансиверов, высокочастотные входы которых являются соответственно первым и вторым высокочастотными выходами диспетчерского центра. Абонентский выход коммутатора является абонентским входом диспетчерского центра.
Благодаря новой совокупности существенных признаков за счет введения вышеуказанных блоков и связей между элементами в системе осуществляется оптимальное сложение двух сигналов (сотовой и спутниковой связи) одного направления связи на приеме и соответствующего их разделения на передаче, а также осуществляется двусторонняя связь с владельцем подвижного объекта (абонентом системы). Возможность оптимального сложения в тракте приема и соответствующего разделения в тракте передачи двух указанных и одновременно работающих каналов связи существенно повысит надежность функционирования системы при эксплуатации подвижного объекта в различных условиях. Так как вероятность того, что будет отсутствовать и спутниковый канал и канал сотовой связи, очень мала, а система сможет работать (т.е. передавать и принимать сообщения) даже и по одному каналу.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественным всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие условию патентоспособности "новизна". Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленной системы, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Заявленное изобретение поясняется схемами:
фиг.1 - функциональная схема предложенной системы контроля, навигации и мониторинга подвижных объектов;
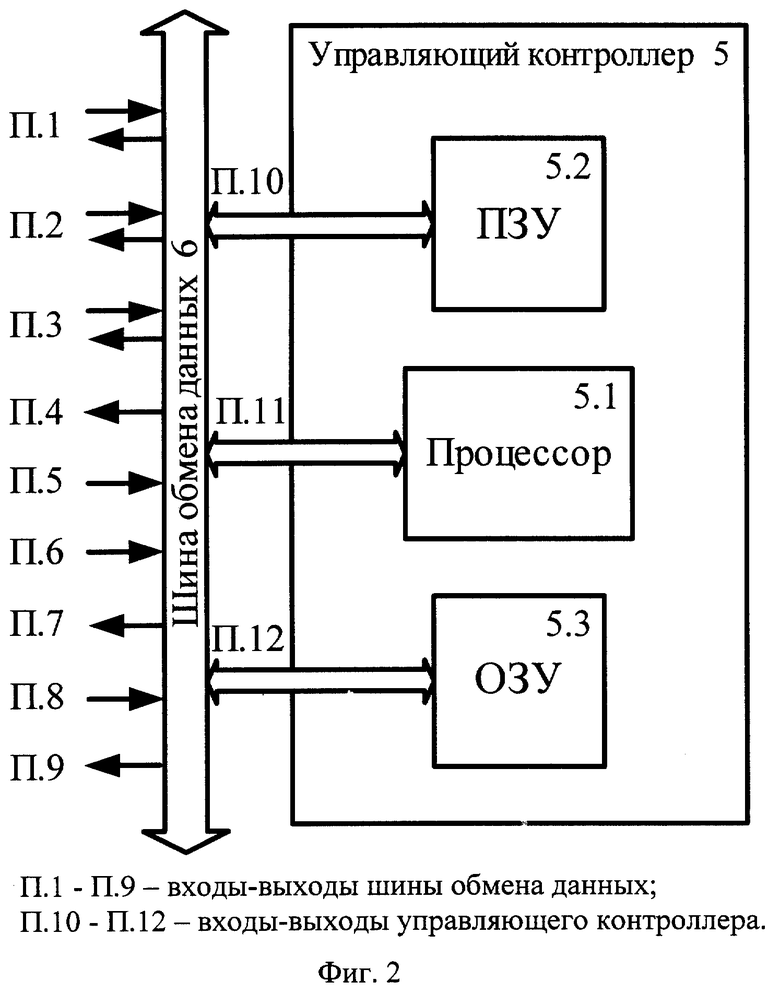
фиг.2 - функциональная схема управляющего контроллера;
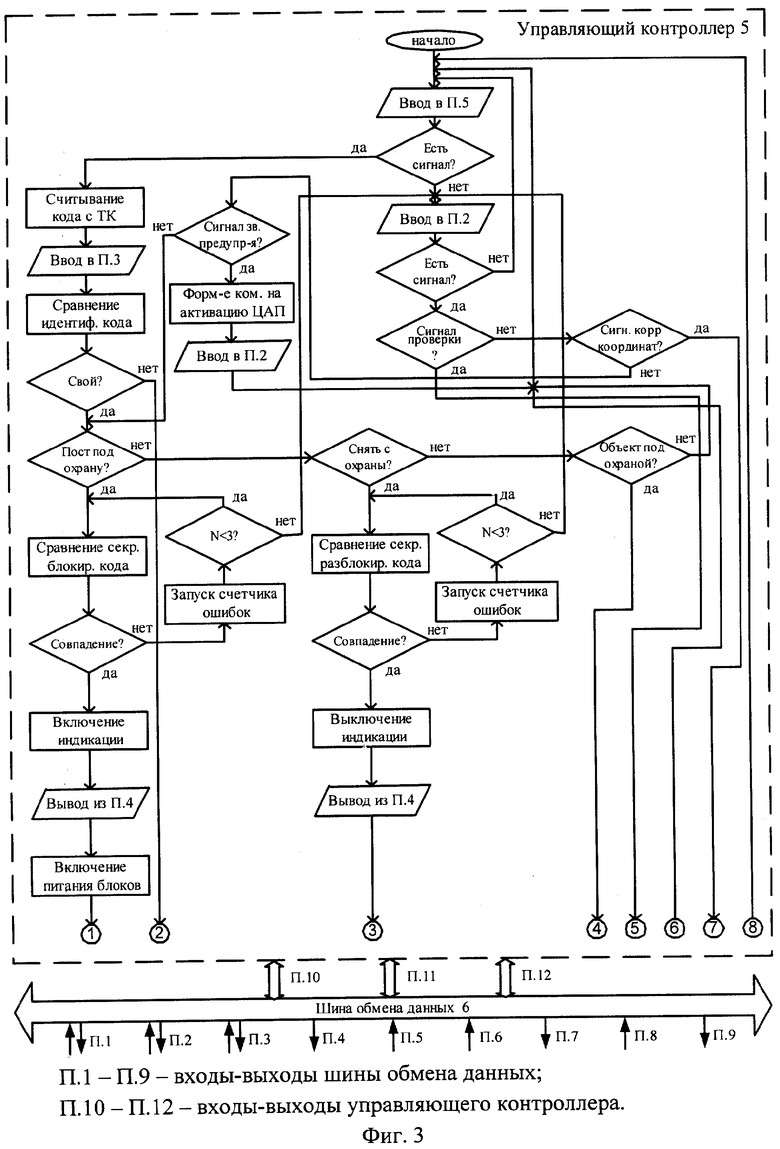
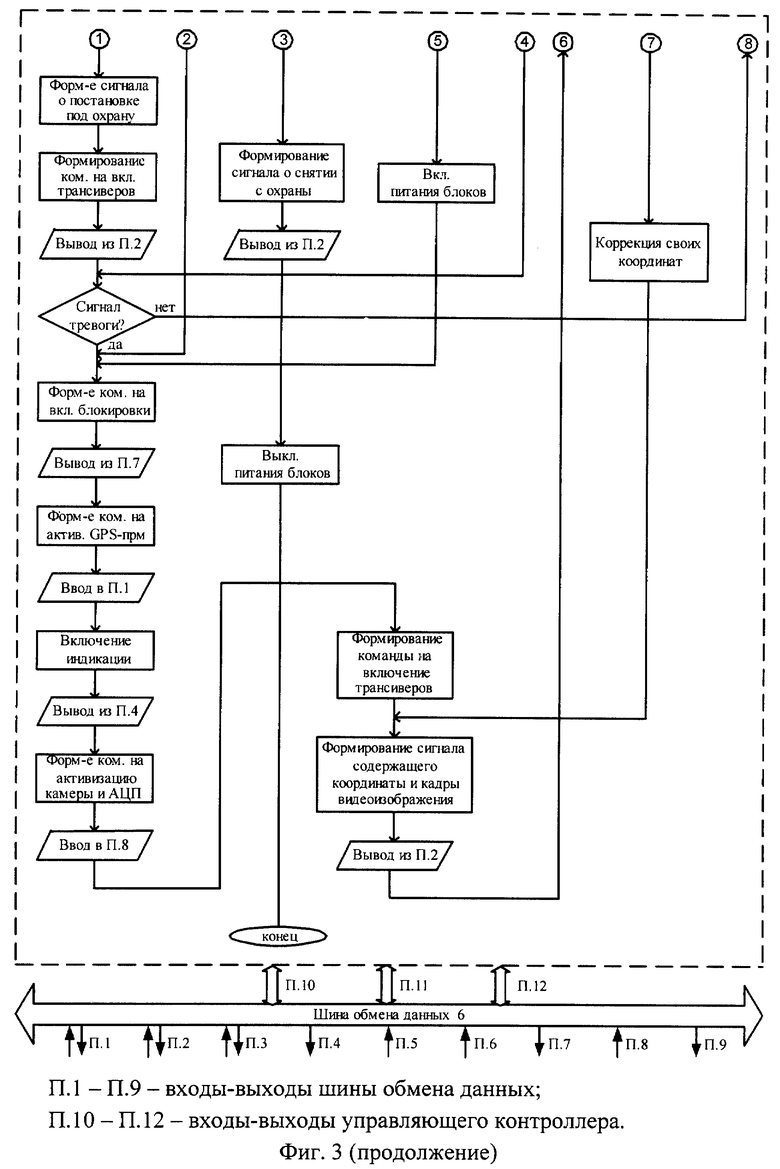
фиг.3 - алгоритм работы управляющего контроллера;
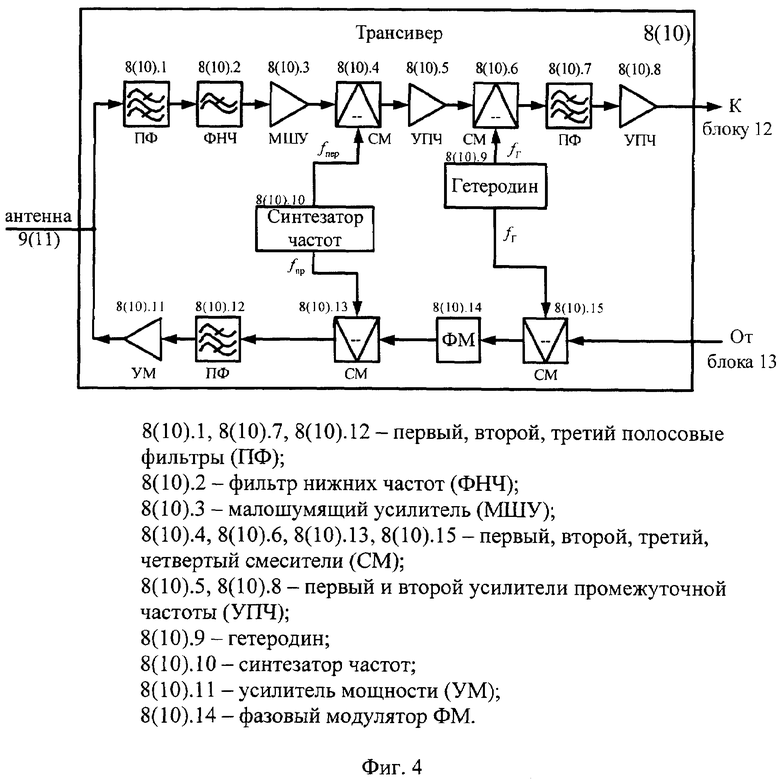
фиг.4 - функциональная схема трансиверов;
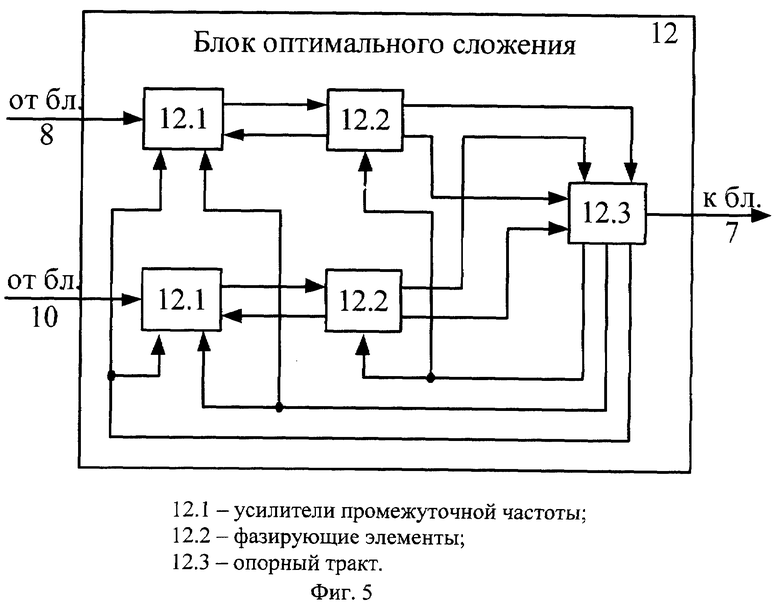
фиг.5 - функциональная схема блока оптимального сложения;
фиг 6 - функциональная схема диспетчерского центра.
Система контроля, навигации и мониторинга подвижных объектов, показанная на фиг.1, состоит из диспетчерского центра 1, снабженного абонентским входом, первый и второй высокочастотные входы диспетчерского центра подключены к выходам антенн соответственно спутниковой 2 и сотовой 3 связи и аппаратуры потребителя. Аппаратура потребителя состоит из бортового компьютера 4, состоящего из управляющего контроллера 5, шины обмена данных 6, аналого-цифрового преобразователя видеосигналов 16, цифроаналогового преобразователя аудиосигналов 17. Также аппаратура потребителя состоит из модема 7, спутникового трансивера 8 с антенной 9, сотового трансивера 10 с антенной 11, блока оптимального сложения 12, делителя мощности 13, спутникового навигационного приемника сигналов GPS 14 с антенной, приемника дистанционного считывания кода 22 с антенной, принимающей сигналы от транспондерной карточки (ТК) 24. Первый и второй информационные выходы приемника дистанционного считывания кода 22 подключены соответственно к первому входу шины обмена данных 6 и первому входу индикатора режимов работы охранных датчиков 23, второй вход которого подключен к первому выходу шины обмена данных 6. Управляющий вход и информационный выход спутникового навигационного приемника сигналов GPS 14 подключены соответственно к второму выходу и второму входу шины обмена данных 6. Первые информационные выход и вход модема 7 подключены соответственно к четвертому входу и третьему выходу шины обмена данных 6. Первая, вторая, третья шины управляющего контроллера 5 подключены соответственно к пятому, шестому и седьмому входам шины обмена данных 6. А также аппаратура потребителя состоит из блока ручного ввода данных 19, выход которого подключен к третьему входу шины обмена данных 6, блокиратора функциональных органов охраняемого объекта 21, вход которого подключен к четвертому выходу шины обмена данных 6, M≥1 охранных датчиков 20, выходы которых объединены и подключены к восьмому входу шины обмена данных 6. Выход телекамеры 15 подключен к входу аналого-цифрового преобразователя видеосигналов 16, выход которого подключен к девятому входу шины обмена данных 6. Вход электроакустического преобразователя 18 подключен к выходу цифроаналогового преобразователя аудиосигналов 17, вход которого подключен к пятому выходу шины обмена данных 6. Выходы спутникового 8 и сотового 10 трансиверов подключены соответственно к первому и второму входам блока оптимального сложения 12, выход которого подключен к второму входу модема 7, второй выход которого подключен к входу делителя мощности 13, первый и второй выходы которого подключены соответственно к входам спутникового 8 и сотового 10 трансиверов.
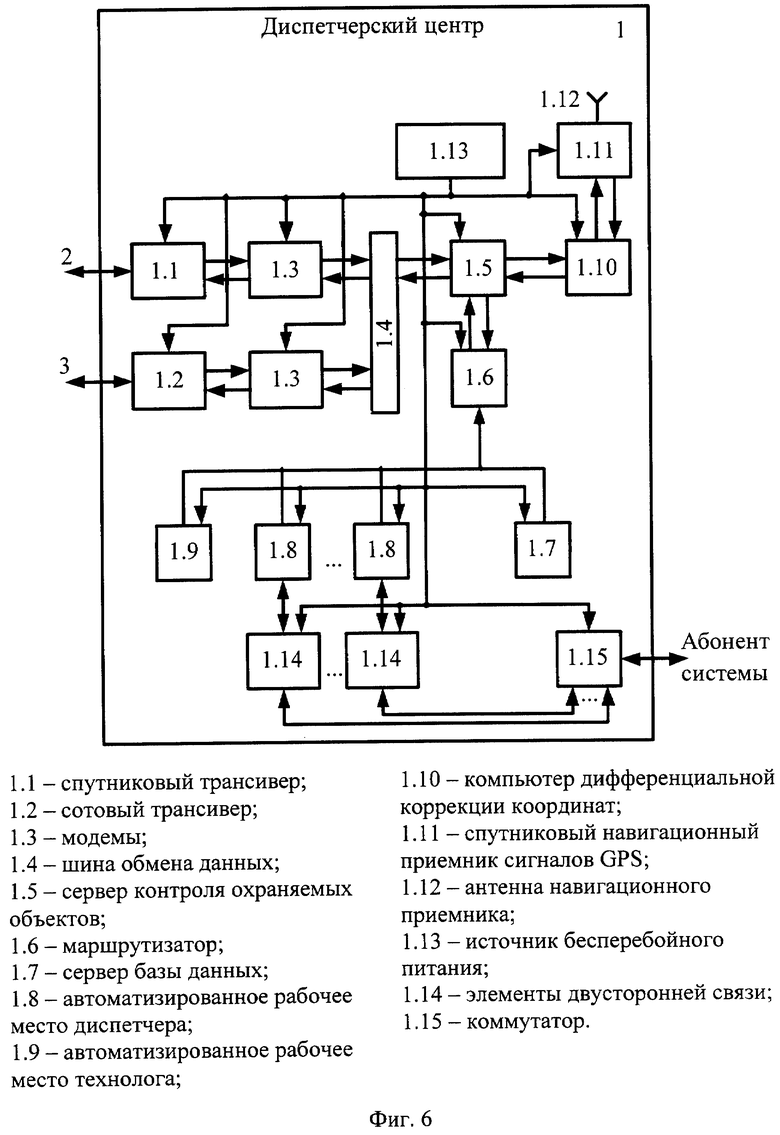
Диспетчерский центр 1 предназначен для сбора, обработки, хранения и отображения информации, поступающей от подвижных объектов, а также для контроля их состояния, с последующей выработкой информационных сообщений и управляющих команд. Он позволяет осуществлять высокоточный дифференциальный режим определения координат подвижных объектов и двустороннюю связь с владельцами подвижных объектов посредством любых каналов электросвязи. Вариант реализации диспетчерского центра 1 представлен на фиг.6. Диспетчерский центр 1, показанный на фиг.6, состоит из спутникового 1.1 и сотового 1.2 трансиверов, первого и второго модемов 1.3, шины обмена данных 1.4, сервера контроля охраняемых объектов 1.5, маршрутизатора 1.6, сервера базы данных 1.7, K≥1 автоматизированных рабочих мест диспетчера 1.8, автоматизированного рабочего места технолога 1.9, компьютера дифференциальной коррекции координат 1.10, спутникового навигационного приемника сигналов GPS 1.11 с антенной 1.12, источника бесперебойного питания 1.13, K≥1 элементов двусторонней связи 1.14, коммутатора 1.15, где K определяется количеством обслуживаемых подвижных объектов и выполняемыми функциями. Выход источника бесперебойного питания 1.13 подключен к питающим входам спутникового 1.1 и сотового 1.2 трансиверов, первого и второго модемов 1.3, сервера контроля охраняемых объектов 1.5, компьютера дифференциальной коррекции координат 1.10, спутникового навигационного приемника сигналов GPS 1.11, сервера базы данных 1.7, маршрутизатора 1.6, коммутатора 1.15, K≥1 автоматизированных рабочих мест диспетчера 1.8, автоматизированного рабочего места технолога 1.9, K≥1 элементов двусторонней связи 1.14. Первый выход i-го, где i=1, 2, 3 ... K, элемента двусторонней связи 1.14 подключен к i-му входу коммутатора 1.15, а второй выход i-го элемента двусторонней связи 1.14 подключен к входу i-го автоматизированного рабочего места диспетчера 1.8. Информационные выходы автоматизированного рабочего места технолога 1.9, сервера базы данных 1.7 и K≥1 автоматизированных рабочих мест диспетчера 1.8 объединены и подключены через локальную компьютерную сеть к первому входу маршрутизатора 1.6, вторые информационные вход и выход которого подключены соответственно к первым информационным выходу и входу сервера контроля охраняемых объектов 1.5. Вторые информационные вход и выход сервера контроля охраняемых объектов 1.5 подключены соответственно к первым информационным выходу и входу компьютера дифференциальной коррекции координат 1.10. Вторые информационный вход и выход компьютера дифференциальной коррекции координат 1.10 подключены соответственно к первым информационным выходу и входу спутникового навигационного приемника сигналов GPS 1.11, высокочастотный вход которого подключен к выходу антенны навигационного приемника 1.12. Третьи информационные вход и выход сервера контроля охраняемых объектов 1.5 подключены соответственно к первым выходу и входу шины обмена данных 1.4. Вторые и третьи входы и выходы шины обмена данных 1.4 подключены к первым информационным выходам и входам соответственно первого и второго модемов 1.3. Вторые информационные входы и выходы модемов 1.3 подключены соответственно к первым информационным выходам и входам спутникового 1.1 и сотового 1.2 трансиверов. Высокочастотные входы спутникового 1.1 и сотового 1.2 трансиверов являются соответственно первым и вторым высокочастотными выходами диспетчерского центра 1. Абонентский выход коммутатора 1.15 является абонентским входом диспетчерского центра 1.
Спутниковый и сотовый трансиверы 1.1 и 1.2 диспетчерского центра 1 и спутниковый и сотовый трансиверы 8 и 10 соответственно аппаратуры потребителя идентичны и будут описаны далее.
Модемы 1.3 диспетчерского центра 1 и модем 7 аппаратуры потребителя идентичны и будут описаны далее.
Сервер контроля охраняемых объектов 1.5 предназначен для обработки и хранения информации, поступающей от подвижных объектов. Состоит из достаточно производительного персонального компьютера, оснащенного системой отображения графической и семантической информации на фоне электронной карты-схемы города (геоинформационной системы). В качестве геоинформационной системы могут использоваться различные программные системы, например, на базе известных коммерческих продуктов Arclnfo, Maplnfo, AutoRoad, Osi-explorer и т.п.
Маршрутизатор 1.6 предназначен для распределения пакетов информации (сообщения), используя адрес и информацию из таблицы маршрутизации. Схема реализации маршрутизатора известна и описана, например, в книге: Менаске Д., Алмейда В. Производительность WEB-служб. Анализ, оценка и планирование. Пер. с англ./Под ред. Менаске Д. - СПб.: ДиаСофт ЮП, 2003. - 480 с., с.95, а также в глобальной сети Internet, в формате документа Adobe Acrobat Reader на сайте: www.nsg.net.ru/doc/arhive/nsg_book_old/nsg_partl.pdf.
Сервер базы данных 1.7 предназначен для хранения информации обо всех отслеживаемых подвижных объектах и их перемещениях. В том числе предусмотрена автоматическая запись в архив управляющих воздействий диспетчеров и всех переговоров (при осуществлении голосовой связи), за необходимый (заданный) период времени. Сервер базы данных 1.7 состоит из производительного персонального компьютера с большим объемом памяти.
АРМ диспетчера 1.8 позволяет отображать местоположение подвижного объекта в реальном масштабе времени на экранах мониторов диспетчеров с привязкой к электронной карте, с указанием координат, курса и скорости движения, вести наблюдение за выбранным подвижным объектом (группой объектов), а также отображать на фоне карты маршруты движения подвижных объектов.
АРМ технолога 1.9 предусматривает следующие возможности: формирование и корректировка графиков и маршрутов движения подвижных объектов, автоматическая подготовка и вывод на печать отчетных документов о перемещении подвижного объекта за требуемый период по формам и показателям заказчика, просмотр архива за любой промежуток времени. АРМ диспетчера 1.8 и АРМ технолога 1.9 могут быть реализованы на основе персональных компьютеров, оснащенных специальным программным обеспечением.
Компьютер дифференциальной коррекции координат 1.10 предназначен для формирования информационных сигналов дифференциальной коррекции координат подвижных объектов, для повышения точности определения координат подвижного объекта. В программном обеспечении компьютера дифференциальной коррекции координат 1.10 используется соответствующая алгоритмическая процедура коррекции координат подвижного объекта.
Спутниковый навигационный приемник сигналов GPS 1.11 диспетчерского центра 1 идентичен спутниковому навигационному приемнику сигналов GPS 14 аппаратуры потребителя и будет описан далее.
Источник бесперебойного питания 1.13 предназначен для поддержания стабильного питания потребителей диспетчерского центра 1. Источник бесперебойного питания 1.13 может быть реализован на основе источников постоянного тока (аккумуляторных батарей), рассчитанных на необходимое напряжение.
Элементы двусторонней связи 1.14 предназначены для информационного обмена диспетчеров с владельцами подвижных объектов. В качестве элементов двусторонней связи 1.14 могут быть использованы, например, обычные телефоны.
Антенна спутниковой связи 2 диспетчерского центра 1 предназначена для приема и передачи сигналов спутникового трансивера 1.1. В качестве антенны спутниковой связи 2 диспетчерского центра 1 может быть использована параболическая антенна. Ее схема известна и описана, например, в книге: Айзенберг Г.З. и др. Антенны УКВ/Под ред. Г.З.Айзенберга. - В 2-х ч., 4.2. - М.: Связь, 1977. - 288 с., с.4-9, 32-34.
Антенна сотовой связи 3 диспетчерского центра 1 предназначена для приема и передачи сигналов сотового трансивера 1.2. В качестве антенны сотовой связи 3 диспетчерского центра 1 может быть использована антенна, типа несимметричный вибратор (штыревая антенна). Ее схема известна и описана, например, в книге: Серков В.П. Распространение радиоволн и антенные устройства. - Л.: ВАС, 1981. - 468 с., с.264-271.
Бортовой компьютер 4 предназначен для сбора, обработки, накопления и хранения информации, поступающей от периферийных устройств (датчиков, блоков, т.д.), с последующей выработкой информационных сообщений и управляющих команд, а также обеспечивает перезапись и хранение большого количества управляющих программ, расширяющих функциональные возможности системы. Бортовой компьютер 4 (фиг.1) состоит из управляющего контроллера 5, шины обмена данных 6, АЦП видеосигналов 16 и ЦАП аудиосигналов 17.
Управляющий контроллер 5 предназначен для сбора, обработки и хранения информации, поступающей от периферийных устройств, а также для формирования управляющих команд и информационных сообщений, содержащих индивидуальные коды, навигационную информацию (координаты, скорость движения) и кадры видеоизображения. Вариант реализации управляющего контроллера 5 представлен на фиг.2. В состав управляющего контроллера 5 входят: процессор 5.1, ПЗУ 5.2, ОЗУ 5.3. Указанная схема может быть реализована в виде единого процессора, алгоритм работы которого показан на фиг.3.
Процессор 5.1 может строиться на базе известных одноплатных персональных компьютеров промышленного исполнения на процессорах 86 (фирм Intel, AMD и др.), а также на однокристальных сигнальных процессорах AD серии 21XX (Analog Device) и TMS серии 32ХХХ (Texas Instruments).
ПЗУ 5.2 обеспечивает перезапись и хранение большого количества управляющих программ, расширяющих возможности системы. Оно может быть реализовано в виде твердотельного устройства промышленного исполнения, Flash-памяти или CD/DVD drive. ОЗУ 5.3 позволяет обеспечить быстрый доступ к памяти.
Модем 7 предназначен для модуляции информационного сигнала в тракте передачи и обратной его демодуляции на промежуточной частоте в тракте приема. Варианты реализации модема 7 известны и описаны, например, в книге: Феер К. Беспроводная цифровая связь. Методы модуляции и расширения спектра. Пер. с англ./Под ред. В.И.Журавлева. - М.: Радио и связь, 2000. - с.150-174. Сигнальный процессор описанных выше модемов также известен и описан в патенте US 4567602 от 28.01.1986 г.
Спутниковый 8 и сотовый 10 трансиверы аппаратуры потребителя и спутниковый 1.1 и сотовый 1.2 трансиверы диспетчерского центра 1 идентичны и предназначены для переноса промежуточной частоты в диапазон СВЧ (спутниковые трансиверы 8 и 1.1) и диапазон УКВ (сотовые трансиверы 10 и 1.2) и дальнейшего усиления в тракте передачи и обратного преобразования принимаемого сигнала к промежуточной частоте в тракте приема путем прямого умножения и сложения с частотами синтезатора частот и гетеродина.
Схемы реализации трансиверов 8(10), 1.1(1.2) известны, производятся промышленностью и приведены, например, в глобальной сети Internet, в формате документа InterNet Explorer на сайте: http://ru3ga.qrz.ru/TX/urald04.shtml, http://www.cqham.ru/trx32-6.htm, а также на фиг.4. Трансивер (фиг.4) состоит из: первого 8(10).1, второго 8(10).7, третьего 8(10).12 полосовых фильтров (ПФ), фильтра нижних частот (ФНЧ) 8(10).2, малошумящего усилителя (МШУ) 8(10).3, первого 8(10).4, второго 8(10).6, третьего 8(10).13, четвертого 8(10).15 смесителей (CM), первого 8(10).5 и второго 8(10).8 усилителей промежуточной частоты (УПЧ), гетеродина 8(10).9, синтезатора частот 8(10). 10, фазового модулятора (ФМ) 8(10).14.
Первый ПФ 8(10).1, ФНЧ 8(10).2, МШУ 8(10).3, первый СМ 8(10).4, первый УПЧ 8(10).5, второй СМ 8(10).6, второй ПФ 8(10).7 и второй УПЧ 8(10). 8 соединены каскадно по информационному сигналу. Выход второго УПЧ 8(10).8 является выходом трансивера 8(10).
Четвертый СМ 8(10).15, ФМ 8(10).14, третий СМ 8(10).13, третий ПФ 8(10).12 и УМ 8(10).11 соединены каскадно и являются входом трансивера 8(10). Первый и второй выходы синтезатора частот 8(10).10 подключены к высокочастотным входам соответственно первого 8(10).4 и третьего 8(10).13 СМ. Первый и второй выходы гетеродина 8(10).9 подключены к высокочастотным входам соответственно второго 8(10).6 и четвертого 8(10).13 СМ. Причем вход первого ПФ 8(10).1 и выход УМ 8(10).11 объединены и являются антенным входом-выходом трансивера 8(10).
Схемы построения трансиверов 8(10), 1.1(1.2) аналогичны, отличие заключается в том, что синтезатор частот 8.10 подает на первый СМ 8.4 частоты передачи для переноса промежуточной частоты в диапазон СВЧ и соответственно частоты приема на четвертый СМ 8.13 для преобразования сигнала в сигнал промежуточной частоты (спутниковые трансиверы 8 и 1.1) или синтезатор частот 10.10 подает на первый СМ 10.4 частоты передачи для переноса промежуточной частоты в диапазон СВЧ и соответственно частоты приема на четвертый CM 10.13 для преобразования сигнала в сигнал промежуточной частоты (сотовые трансиверы 10 и 1.2).
Антенны спутниковой 9 и сотовой 11 связи спутникового 8 и сотового 10 трансиверов соответственно предназначены для передачи и приема сигналов спутниковой (СВЧ) и сотовой (УКВ) связи соответственно. В качестве антенны спутниковой связи 9 могут использоваться антенны СВЧ типа: фазированной антенной решетки, схема построения которой известна и описана, например, в книге: Антенны и устройства СВЧ (Проектирование ФАР)./Д.И Воскресенский, Р.А.Трановская, Н.С.Давыдова; Под ред. Д.И.Воскресенского. Учебное пособие для ВУЗов. - М.: Радио и связь, 1981. - 432 с., с.20-26 или волноводно-щелевой решетки, схема которой известна и описана, например, в книге: Антенны и устройства СВЧ (Проектирование ФАР)./Д.И.Воскресенский, Р.А.Трановская, Н.С.Давыдова; Под ред. Д.И.Воскресенского. Учебное пособие для ВУЗов. - М.: Радио и связь, 1981. - 432 с., с.107-115.
Блок оптимального сложения 12 предназначен для усиления сигналов промежуточной частоты одного направления связи, автоматической регулировки уровня сигналов по шумам для выравнивания уровня шумов различных сигналов, фазирования сигналов одного направления и оптимального сложения сигналов пропорционально отношению сигнал/(помеха+шум). Вариант реализации блока оптимального сложения 12 показан на фиг.5. Блок оптимального сложения 12 состоит из двух усилителей промежуточной частоты 12.1, двух фазирующих элементов 12.2 и опорного тракта 12.3.
Усилители промежуточной частоты 12.1 идентичны и предназначены для усиления сигналов промежуточной частоты одного направления связи, автоматической регулировки уровня шумов различных сигналов. Схема реализации усилителя промежуточной частоты 12.1 известна и может быть реализована, например, по схеме: Тропосферная станция Р-410М-7,5. Альбом схем. - Л.: ВАС., 1982, 26 с., Рис.4.7.
Фазирующие элементы 12.2 идентичны и предназначены для приведения сигналов одного направления связи к единой фазе, а также для формирования напряжений групповой и шумовой автоматических регулировок уровня. Схема фазирующих устройств 12.2 известна и описана, например, в книге: Тропосферная станция Р-410М-7,5. В.К.Снежко, М.А.Вознюк, Н.В.Мастеров. - Л.: ВАС.,1982, 100 с., с.74, Тропосферная станция Р-410М-7,5. Альбом схем.// Л.: ВАС., 1982, 26 с., Рис.4.7.
Опорный тракт 12.3 предназначен для сложения сфазированных сигналов промежуточной частоты одного направления связи, формирования опорного напряжения информационного сигнала для фазирующих устройств, формирования напряжений опорной шумовой и групповой автоматической регулировки уровня для усилителей промежуточной частоты 12.1 на основе напряжений групповой автоматической регулировки уровня, поступающих от фазирующих элементов 12.2. Опорный тракт 12.3 также обеспечивает автоматическую регулировку уровня опорного сигнала. Схема опорного тракта 12.3 известна и описана, например, в книге: Тропосферная станция Р-410М-7,5 В.К.Снежко, М.А.Вознюк, Н.В.Мастеров.// Л.: ВАС., 1982, 100 с., с.78, Тропосферная станция Р-410М-7,5. Альбом схем.// Л.: ВАС., 1982, 26 с., Рис.4.7.
Делитель мощности 13 предназначен для деления мощности сигнала на две равные доли. Его схема известна и описана, например, в статье: Якимев Б.Я., Солонцов П.А. Многоканальный СВЧ делитель мощности с произвольным амплитудным распределением на выходах. - Изд. вузов СССР, Радиоэлектроника, 1987 г., 2, с.118-121.
Спутниковый навигационный приемник сигналов GPS 14 предназначен для приема сигналов спутниковых радионавигационных систем: американской - NAVSTAR (GPS) и/или российской - ГЛОНАСС. Он позволяет определять координаты подвижного объекта с высокой точностью. Его схема известна и описана в статье: Н.Лукьяненко, С.Батищев, А.Кириченко, О.Борсук. Опыт КБ "НАВИС" в области ГЛОНАСС/GPS-технологий. - Мобильные телекоммуникации, 2000 г., 8.
В качестве телекамеры 15 может быть использована широкоугольная, миниатюрная камера внутреннего наблюдения с объективом типа Pin-hole. Также могут применяться и видеокамеры промышленного исполнения следующего типа: переднего (заднего) обзора внешнего пространства вокруг объекта контроля, кругового обзора видимого или инфракрасного диапазонов длин волн на поворотном устройстве или телекамера на гироплатформе для установки на подвижных средствах контроля окружающей среды и т д.
АЦП видеосигналов 16, входящий в состав бортового компьютера 4 (фиг.1), предназначен для преобразования электрических аналоговых информационных сигналов в цифровой вид и их передачи через шину обмена данных 6 в управляющий контроллер 5, где они подвергаются сжатию, например, методом Вейвлет-преобразования и затем через модем 7, делитель мощности 13, антенны 9 и 11 спутникового 8 и сотового 10 трансиверов соответственно передаются для обработки в диспетчерский центр 1. Схема построения АЦП видеосигналов 14 известна и описана, например, в книге: В.В.Гусев, О.Н.Лебедев, A.M.Сидоров. Основы импульсной и цифровой техники/Под ред. Ф.М.Сидорова. - СПВВИУС, 1995. - с.226-240.
ЦАП аудиосигналов 17, входящий в состав бортового компьютера 4 (фиг.1), предназначен для преобразования информации из цифровой формы в аналоговую. Схема построения ЦАП 15 известна и описана, например, в книге: В.В.Гусев, О.Н.Лебедев, A.M.Сидоров. Основы импульсной и цифровой техники/Под ред. Ф.М.Сидорова. - СПВВИУС, 1995. - с.220-226. Одним из вариантов реализации схемы ЦАП может быть аудиоплата для персонального компьютера промышленного исполнения, совместимая со стандартом Sound Blaster.
Электроакустический преобразователь 18 предназначен для выдачи управляющих и информационных звуковых сообщений. Такими сообщениями могут быть фразы о необходимости подготовиться к маневру или выполнению тех или иных действий, связанных с эксплуатацией системы. В качестве аудиосистемы могут использоваться любые громкоговорители, например, широко выпускаемые автомобильные аудиоколонки типа: "Clarion", "JVS", "LG", "Pioneer" и др.
Блок 19 ручного ввода данных предназначен для приведения системы в автономный режим путем набора проверочных, секретных блокирующих и разблокирующих кодовых комбинаций, а также кода запроса на приведение подвижного объекта в режим дифференциальной коррекции координат. В качестве блока ручного ввода 19 данных может быть использовано кодонаборное устройство любого типа.
Охранные датчики 20 предназначены для информирования системы о нарушении любого контура охраны. Они могут быть реализованы в виде любых контактных элементов, работающих по принципу "Замыкание", "Размыкание".
Блокиратор функциональных органов охраняемого объекта 21 предназначен для блокирования функциональных органов охраняемого подвижного объекта, например блокирования работы двигателя автомобиля. Блокиратор функциональных органов охраняемого объекта 21 может быть реализован в виде блока управления иммобилайзером подвижного объекта, работающего по типу управляемого контактного реле, а также в виде беспроводного реле блокировки типа WAIT-UP или HOOK-UP и других серийно выпускаемых предприятием-заявителем противоугонных и охранных автомобильных систем.
Приемник дистанционного считывания кода 22 предназначен для реализации функции опознавания владельца по типу "свой-чужой". Он выполнен с возможностью считывания идентификационного кода с ТК 24. Схемы приемников такого типа известны, реализованы и широко применяются в серийно выпускаемых предприятием-заявителем противоугонных и охранных автомобильных системах, например охранных автомобильных системах типа Black Bug, DefaAS, Guard, Magic Systems, Prestige, Reef.
С точки зрения задачи, решаемой настоящим изобретением, описанные выше функциональные схемы не содержат каких-либо блоков, реализация которых потребовала бы дополнительной детализации и отдельного описания.
Предложенная система контроля, навигации и мониторинга подвижных объектов работает следующим образом.
При постановке объекта на охрану или тестировании аппаратуры потребителя на работоспособность либо при выявлении факта несанкционированного воздействия на объект, например попытки угона автомобиля, владелец подвижного объекта (абонент системы) сообщает об этом по любому из каналов электросвязи (телефонной сети общего пользования, сотовой сети, транкинговой сети, web-интерфейс и др.) через коммутатор 1.15, элементы двусторонней связи 1.14 в любое свободное автоматизированное рабочее место (АРМ) диспетчера 1.8, входящее в состав диспетчерского центра 1. Так при постановке объекта на охрану в АРМ диспетчера 1.8 диспетчерского центра 1 сообщаются, к примеру по телефонной сети общего пользования, индивидуальный номер и секретный блокирующий код, а при тесте аппаратуры или при выявлении факта несанкционированного воздействия на объект диспетчеру дополнительно сообщаются специальные секретные проверочные коды. Абонент системы узнает их после стирания, например ребром монеты, защитного покрытия с соответствующих полей на поверхности ТК 24. Диспетчер диспетчерского центра 1 принимает указанное сообщение, полученное по одному из каналов электросвязи, формирует кодированную управляющую команду и отправляет ее через маршрутизатор 1.6, сервер контроля охраняемых объектов 1.7, выход которого подключен к входу шины обмена данных 1.4, выходы которой подключены к входам соответственно первого и второго модемов 1.3, выходы которых подключены к входам соответственно спутникового 1.1 и сотового 1.2 трансиверов с антеннами в эфир.
На подвижном объекте, находящемся в различных условиях местности, эти кодированные управляющие сигналы принимаются антеннами 9 и 11 спутникового 8 и сотового 10 трансиверов соответственно, преобразуются в сигналы промежуточной частоты, которые затем поступают на блок 12 оптимального сложения сигналов, где происходит их оптимальное сложение (из двух слагаемых каналов связи может использоваться только один (любой) канал связи), далее результирующий сигнал на промежуточной частоте поступает в модем 7, в котором происходит его демодуляция и декодирование. После этого информационный сигнал через входы-выходы П.2 шины обмена данных 6 поступает для обработки на входы-выходы П.12 управляющего контроллера 5 бортового компьютера 4 и записывается в ОЗУ 5.3. Затем процессор 5.1 определяет вид этого сигнала: сигнал проверки - специальный секретный проверочный код, сигнал коррекции координат, сигнал звукового предупреждения или сигнал постановки/снятия с охраны - секретный блокирующий/разблокирующий коды.
Если поступивший в управляющий контроллер 5 сигнал является сигналом проверки (теста аппаратуры) или несанкционированного воздействия на подвижный объект, то процессор 5.1 формирует управляющую команду на включение питания блоков и блокирование функциональных органов охраняемого объекта, например двигателя автомобиля. Эта команда через входы-выходы П.11 управляющего контроллера 5 бортового компьютера 4, выход П.7 шины обмена данных 6 поступает в блокиратор функциональных органов охраняемого объекта 21. Например, если объектом охраны является автомобиль, то в качестве блокиратора функциональных органов охраняемого объекта могут выступать: блок управления иммобилайзером, беспроводные реле блокировки типа WAIT-UP или HOOK-UP и др. Также процессор 5.1 формирует управляющую команду на активацию спутникового навигационного приемника сигналов GPS 14, которая через вход-выход П.11 управляющего контроллера 5 бортового компьютера 4, вход-выход П.1 шины обмена данных 6 поступает в спутниковый навигационный приемник сигналов GPS 14. После этого спутниковый навигационный приемник сигналов GPS 14 начинает формировать сигналы, содержащие координаты, скорость и другие показатели подвижного объекта, которые через вход-выход П.1 шины обмена данных 6, вход-выход П.12 управляющего контроллера 5 бортового компьютера 4 поступают в ОЗУ 5.3. Затем процессор 5.1 формирует управляющую команду на включение индикации, которая через вход-выход П.11 управляющего контроллера 5 бортового компьютера 4, выход П.4 шины обмена данных 6 поступает в индикатор режимов работы охранных датчиков 23. Далее процессор 5.1 формирует управляющую команду на активацию камеры 15 и АЦП видеосигналов 16. После этого камера 15 начинает формировать кадры видеоизображения внутренней обстановки на охраняемом подвижном объекте, содержащие, например, изображение злоумышленника, которые поступают в АЦП видеосигналов 16. Затем эти кадры через вход П.8 шины обмена данных 6, вход-выход П.11 управляющего контроллера 5 бортового компьютера 4 поступают в процессор 5.1, где происходит их сжатие методом, например, Вейвлет-преобразования. Также процессор 5.1 формирует управляющую команду на включение спутникового 8 и сотового 10 трансиверов. После этого процессор 5.1 формирует сигнал, содержащий координаты, скорость подвижного объекта и кадры видеоизображения злоумышленника. Этот информационный сигнал через вход-выход П.11 управляющего контроллера 5 бортового компьютера 4, вход-выход П.2 шины обмена данных 6 поступает в модем 7. Затем информационный сигнал с заданным периодом, согласованным со скоростью передачи информации по радиоканалам, поступает в делитель мощности 13, в котором сигнал разделяется на две равные доли и поступает на спутниковый 8 и сотовый 10 трансиверы соответственно, которые с помощью своих антенн 9 и 11 передают в эфир (окружающее пространство) тревожные информационные сообщения, содержащие индивидуальные коды идентификационных признаков, например коды государственного номера, марки и цвета автомобиля, подвергшегося несанкционированному воздействию злоумышленника, координаты, скорость, охраняемого подвижного объекта и кадры видеоизображения злоумышленника.
Если поступивший в управляющий контроллер 5 сигнал является сигналом коррекции координат подвижного объекта, то процессор 5.1 формирует команду на коррекцию своих координат, т.е. процессор 5.1 сравнивает и заменяет сигнал, содержащий координаты, скорость и другие показатели подвижного объекта, записанные в ОЗУ 5.3, сигналом, поступившим через вход-выход П.2 шины обмена данных 6, вход-выход П.12 управляющего контроллера 5 бортового компьютера 4.
Если поступивший в управляющий контроллер 5 сигнал является сигналом звукового предупреждения, то процессор 5.1 формирует управляющую команду на активацию ЦАП 17. После этого информационный сигнал от модема 7 через вход-выход П.2 шины обмена данных 6, вход-выход П.11 управляющего контроллера 5 бортового компьютера 4 поступает в процессор 5.1, а затем через вход-выход П.11 управляющего контроллера 5, выход П.9 шины обмена данных 6 поступает в ЦАП 17 и потом в электроакустический преобразователь 18.
Если поступивший в управляющий контроллер 5 сигнал является сигналом постановки под охрану, то процессор 5.1 сравнивает поступивший секретный блокирующий код с кодом, хранящимся в ПЗУ 5.2. При совпадении этих кодов процессор 5.1 формирует управляющую команду на включение индикации, которая через вход-выход П.11 управляющего контроллера 5 бортового компьютера 4, выход П.4 шины обмена данных 6 поступает в индикатор режимов работы охранных датчиков 23. Также процессор 5.1 формирует управляющую команду на включение питания блоков. Затем процессор 5.1 формирует сигнал о постановке под охрану и команду на включение спутникового 8 и сотового 10 трансиверов, которые через вход-выход П.11 управляющего контроллера 5 бортового компьютера 4, вход-выход П.2 шины обмена данных 6 поступают в модем 7. После этого, при несанкционированном срабатывании каких-либо охранных датчиков 20 (т.е. при поступлении сигнала через вход П.6 в процессор 5.1 и ОЗУ 5.3 управляющего контроллера 5) система работает по алгоритму, аналогичному вышеописанному случаю поступления сигнала проверки (фиг.3).
Если поступивший в управляющий контроллер 5 сигнал является сигналом снятия с охраны, то процессор 5.1 сравнивает поступивший секретный разблокирующий код с кодом, хранящимся в ПЗУ 5.2. При совпадении этих кодов процессор 5.1 формирует управляющую команду на выключение индикации, которая через вход-выход П.11 управляющего контроллера 5 бортового компьютера 4, выход П.4 шины обмена данных 6 поступает в индикатор режимов работы охранных датчиков 23. Также процессор 5.1 формирует сигнал о снятии с охраны, который через вход-выход П.11 управляющего контроллера 5 бортового компьютера 4, вход-выход П.2 шины обмена данных 6 поступает в модем 7. Затем процессор 5.1 формирует команду на выключение питания блоков.
Определение с высокой точностью координат подвижного объекта осуществляется в заявленном изобретении традиционным путем - введением в состав аппаратуры потребителя спутникового навигационного приемника сигналов GPS 14, предназначенного для приема сигналов спутниковой глобальной системы GPS/ГЛОНАСС. Спутниковый навигационный приемник сигналов GPS 14 через свою антенну принимает сигналы вышеуказанных систем, осуществляет их обработку и передает результаты обработки (координаты, скорость и другие параметры подвижного объекта) последовательно через шину обмена данных 6 в ОЗУ 5.3 управляющего контроллера 5, в котором происходит формирование информационных сообщений, содержащих координаты, скорость, индивидуальные коды подвижного объекта, кадры видеоизображения злоумышленника, поступающие в управляющий контроллер 5 через шину обмена данных 6, АЦП видеосигналов 16 от телекамеры 15. Далее эти информационные сообщения через шину обмена данных 6 поступают в модем 7, где происходит их модуляция, кодирование и затем сигналы на промежуточной частоте через делитель мощности 13 поступают в спутниковый 8 и сотовый 10 трансиверы соответственно, где происходит перенос сигнала на промежуточной частоте в рабочий диапазон частот спутникового 8 и сотового 10 трансиверов. Сигналы на этих частотах излучаются через антенны 9 и 11 спутникового 8 и сотового 10 трансиверов соответственно в эфир по радиоканалам, откуда принимаются сервером контроля охраняемых объектов 1.5 диспетчерского центра 1. Прием сигнала аппаратурой диспетчерского центра 1 осуществляется аналогично рассмотренному приему сигнала аппаратурой потребителя. При этом в сервере контроля охраняемых объектов 1.5 диспетчерского центра 1 необходимо учитывать задержку при распространении сигнала по спутниковому радиоканалу (т.е от спутникового трансивера 8 подвижного объекта). Эта задержка учитывается путем сравнения в сервере контроля охраняемых объектов 1.5 информационных сообщений, а именно времени GPS/ГЛОНАСС, находящегося на определенной позиции в формате передаваемого информационного сообщения.
Для достижения максимально высокой геодезической точности навигации в диспетчерском центре 1 может быть предусмотрена дифференциальная коррекция координат подвижных объектов. Поэтому в составе аппаратуры диспетчерского центра 1 используются спутниковый навигационный приемник сигналов GPS 1.11 с антенной 1.12, принимающей сигналы спутниковых радионавигационных систем NAVSTAR (США) - GPS и/или ГЛОНАСС (Россия), аналогичный спутниковому навигационному приемнику сигналов GPS 14 подвижного объекта, компьютер дифференциальной коррекции координат 1.10, подключенный к серверу контроля охраняемых объектов 1.5. В программном обеспечении компьютера дифференциальной коррекции координат 1.10 используется соответствующая алгоритмическая процедура коррекции координат подвижного объекта.
Заявка на работу в этом режиме выдается автономно блоком ручного ввода данных 19 или дистанционно - диспетчерским центром 1. При этом сервер контроля охраняемых объектов 1.5 подает команду на компьютер дифференциальной коррекции координат 1.10 о подготовке дифференциальных поправок на основе обработки спутниковых навигационных сигналов, поступающих в него с выхода спутникового навигационного приемника сигналов GPS 1.11, вход которого подключен к его собственной антенне 1.12, принимающей сигналы спутниковых радионавигационных систем GPS/ГЛОНАСС. Далее информация о дифференциальных поправках из компьютера дифференциальной коррекции координат 1.10 поступает в сервер контроля охраняемых объектов 1.5, откуда через шину обмена данных 1.4, выходы которой подключены к входам соответственно первого и второго модемов 1.3, выходы которых подключены к входам соответственно спутникового 1.1 и сотового 1.2 трансиверов с антеннами, сигналы, несущие информацию о дифференциальных поправках передаются по двум радиоканалам подвижному объекту, в котором принимаются антеннами 9 и 11 спутникового 8 и сотового 10 трансиверов соответственно и через блок 12 оптимального сложения, модем 7, шину обмена данных 6 поступают в процессор 5.1 управляющего контроллера 5 для совместной обработки с информацией, поступающей от спутникового навигационного приемника сигналов GPS 14 аппаратуры потребителя.
Сигнал тревоги о несанкционированном воздействии на охраняемый объект может быть инициирован и в автоматическом режиме. Выбор этого режима осуществляется абонентом системы путем набора соответствующей команды в блоке ручного ввода данных 19. Эта команда поступает через вход П.5 шины обмена данных 6, вход-выход П.12 управляющего контроллера 5 бортового компьютера 4 в ОЗУ 5.3. Процессор 5.1 формирует команду приемнику дистанционного считывания кода 22 на считывание идентификационного кода с ТК 24, которая через вход-выход П.3 шины обмена данных 6, вход-выход П.12 управляющего контроллера 5 бортового компьютера 4 поступает в ОЗУ 5.3. Процессор 5.1 сравнивает считанный код с кодом, загруженным через вход-выход п.10 из ПЗУ 5.2. При совпадении идентификационного кода процессор 5.1 анализирует и сравнивает поступающие в него команды с блока ручного ввода данных 19. Дальнейший алгоритм работы аппаратуры потребителя аналогичен рассмотренным выше вариантам: в случае сигнала постановки/снятия с охраны. Сигнал о постановке подвижного объекта на охрану формируется процессором 5.1 управляющего контроллера 5 и последовательно через шину обмена данных 6, модем 7, делитель мощности 13, антенны 9 и 11 соответственно спутникового 8 и сотового 10 трансиверов пересылается по радиоканалам в сервер контроля охраняемых объектов 1.5 диспетчерского центра 1, откуда через маршрутизатор 1.6, сервер базы данных 1.7, АРМ диспетчера 1.8, по необходимости, АРМ технолога 1.9, элементы двусторонней связи 1.14, коммутатор 1.15, информация сообщается владельцу подвижного объекта (абоненту системы), в удобном для него виде (формате).
Нейтрализация срабатывания каких-либо охранных датчиков 20 обеспечивается набором абонентом системы соответствующего секретного кода в блоке 19 ручного ввода данных. Набранный код через вход-выход П.3 шины обмена данных 6, вход-выход п.12 управляющего контроллера 5 бортового компьютера 4 поступает в ОЗУ 5.3. управляющего контроллера 5. Процессор 5.1 сравнивает этот секретный код с ранее записанным в его ПЗУ 5.2. При совпадении этих кодов процессор 5.1 формирует команду о снятии данного объекта с охраны (либо об отключении каких-либо охранных датчиков 20), которая последовательно через вход-выход П.11 управляющего контроллера 5 бортового компьютера 4, вход-выход П.2 шины обмена данных 6, поступает в модем 7. Из модема 7 через делитель мощности 13 и антенны 9 и 11 спутникового 8 и сотового 10 трансиверов соответственно сигнал о снятии с охраны пересылается по радиоканалам в диспетчерский центр 1 для обработки диспетчером.
Диспетчер диспетчерского центра 1 может наблюдать и анализировать одновременно данные о местоположении охраняемого подвижного объекта, данные о направлении и скорости его перемещения на местности, а также данные о владельце, данные технического паспорта на подвижный объект, кадры изображения внутренней обстановки на нем, например изображение злоумышленника и другие важные для принятия оперативных решений данные.
Таким образом, совокупность общих с системой-прототипом признаков и отличительных признаков заявленной системы порождает новое качество - существенно более высокую эффективность противодействия несанкционированному воздействию на подвижный объект, проникновению в него злоумышленника и попыткам воспользоваться объектом в своих целях, т.е. обеспечивается достижение поставленной цели - повышение надежности функционирования системы контроля, навигации и мониторинга подвижных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2279714C1 |
| АВТОМОБИЛЬНЫЙ ПРОТИВОУГОННЫЙ КОМПЛЕКС С ОПРЕДЕЛЕНИЕМ ГЕОГРАФИЧЕСКИХ КООРДИНАТ | 2006 |
|
RU2333853C2 |
| СИСТЕМА МОНИТОРИНГА ПОДВИЖНЫХ РЕКЛАМНЫХ ОБЪЕКТОВ | 2004 |
|
RU2279139C2 |
| СИСТЕМА ОХРАНЫ, ЗАЩИТЫ И МОНИТОРИНГА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2250844C1 |
| ИНФОРМАЦИОННО-ОХРАННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2244641C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 2001 |
|
RU2196358C2 |
| СИСТЕМА МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2243113C1 |
Изобретение относится к системам охранной ситгнализации и касается систем контроля, навигации и мониторинга подвижных объектов. На подвижном объекте расположены приемник дистанционного считывания кода с антенной, бортовой компьютер, управляющий контроллер, шина обмена данных, группа охранных датчиков, индикатор режимов работы охранных датчиков, модем, спутниковый трансивер с антенной, сотовый трансивер с антенной, блок оптимального сложения, делитель мощности, спутниковый навигационный приемник сигналов GPS, телекамера, аналого-цифровой преобразователь видеосигналов, цифроаналоговый преобразователь аудиосигналов, электроакустический преобразователь, блок ручного ввода данных и блокиратор функциональных органов охраняемого объекта. Диспетчерский центр выполнен с двумя высокочастотными входами, подключенными к антеннам соответственно спутниковой и сотовой связи, а также с абонентским входом. Предложенная система является универсальной и позволяет эффективно противодействовать несанкционированному воздействию на охраняемый объект, а также оперативно изменять порядок функционирования блоков в зависимости от выполняемых ею функций. 2 з.п. ф-лы. 6 ил.
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2000 |
|
RU2155684C1 |
| US 5504482 А, 02.04.1996. | |||

