Изобретение относится к области средств диагностики состояния рельсовой колеи железнодорожного пути.
При эксплуатации рельсовой колеи железнодорожного пути происходят непрерывные изменения ее геометрических параметров и деформационных свойств, которые в значительной степени определяют устойчивость движения подвижного состава, комфорт пассажиров, сохранность перевозимых грузов и т.п. В силу этого возникает необходимость оценки этих изменений или отступлений.
Основными геометрическими параметрами рельсовой колеи, которые измеряются и регистрируются существующими путеизмерительными вагонами и которые в основном влияют на плавность и безопасность движения поездов, являются [1]:
ширина L рельсовой колеи, которая в данном сечении пути определяется по величине отклонения от "нулевой" ширины, равной 1520 мм;
взаимное положение рельсовых нитей по уровню (высоте) Δ, определяемое как разность положения центров колес колесной пары относительно плоскости горизонта;
местные просадки (горбы и впадины) каждой рельсовой нити Δ1 и Δ2, определяемые как максимальные отклонения рельсовой колеи по высоте на базе, равной 2,7 м;
положение рельсовых нитей по направлению в плане ΔA1 и ΔA2, которые определяются стрелами изгиба рельсовой нити в плане, измеренными от середины хорды установленной длины (20 м).
Геометрические параметры железнодорожного пути контролируются непосредственным осмотром пути с применением специальных приборов и инструментов работниками дистанции при проходе пешком либо пропуском измерительных тележек и вагонов, автоматически регистрирующих состояние пути [2]. В качестве аналога можно отметить также "Устройство для контроля состояния рельсового пути (и реализуемый им способ)" по авторскому свидетельству СССР N 1671756, E 01 B 35/00, 1991 г. на 3 страницах.
Существующие путеизмерительные вагоны обеспечивают контроль и проверку состояния пути при воздействии на него подвижного состава, движущегося со скоростями до 120 км/ч. Такие вагоны оборудованы автоматической системой прямого измерения, состоящей из устройств (датчиков), контактирующих с рельсом и предназначенных для непосредственного измерения контролируемых величин относительно измерительной базы, механизма, суммирующего и передающего измеренные величины, и самопишущего устройства, записывающего на ленте контролируемые величины в определенном масштабе [2]. Датчики таких вагонов монтируются на неподрессоренных рамах ходовых тележек, а суммирующие и самопишущие устройства - в подрессоренном кузове вагона.
В качестве прототипа для предлагаемого способа выбрана последовательность действий по измерению геометрических параметров железнодорожного пути, реализованная в вагоне-путеизмерителе системы ЦНИИ-2 [3]. Система ЦНИИ-2 измеряет ширину рельсовой колеи, положение рельсовых нитей по уровню, просадки рельсовых нитей, направление рельсовых нитей в плане, а также скорость движения вагона. При этом измерения положения рельсовых нитей по уровню производятся с помощью двух датчиков, установленных на противоположных буксах колесной пары. При несовпадении по уровню рельсовых нитей один из датчиков опускается, а другой поднимается. С помощью системы рычагов и тяг производится прямое измерение этих перемещений относительно плоскости горизонта, создаваемой гироскопическим устройством, установленным в подрессоренной части вагона.
Измерение просадок производится с помощью четырех одинаковых механических датчиков, установленных на буксах одной из ходовых тележек. Каждая пара датчиков, смонтированных на одной стороне тележки, позволяет определить просадку соответствующей рельсовой нити. При наличии просадки первое по ходу колесо опустится относительно рамы вагона на величину просадки. Это вызовет опускание первого датчика и перемещение гибкой тяги, связанной с суммирующим устройством. При дальнейшем движении вагона просядет и второе по ходу колесо, вызвав перемещение элементов механизма в противоположную сторону.
Механизм для измерения направления рельсовых нитей в плане измеряет стрелы изгиба каждой рельсовой нити относительно хорды путеизмерителя с помощью двух одинаковых механизмов рихтовки, включающих измерительные лыжи и систему тяг.
Таким образом, способ измерения любого из перечисленных выше геометрических параметров, реализованных в вагоне-путеизмерителе ЦНИИ-2, состоит в следующем: снимается информация о состоянии пути первичными измерителями - роликами, лыжами; преобразовывается в линейные или угловые перемещения; передается в суммирующий орган с помощью механических (рычажно-трос-блочных) передач, а также к регистрирующему органу - самопишущему устройству.
Наиболее существенным недостатком описанного выше способа измерения геометрических параметров железнодорожного пути является сложность его реализации, необходимость использования специальных вагонов-путеизмерителей с сложными механическими устройствами, сложность в настройке и эксплуатации. Необходимость использования специальных вагонов-путеизмерителей не дает возможности оперативного контроля состояния пути в процессе нормальной эксплуатации железной дороги, накладывает ограничение на скорость движения состава.
Целью предлагаемого способа является упрощение выполнения измерений геометрических параметров железнодорожной колеи и обеспечение оперативного контроля состояния пути в процессе нормальной эксплуатации железной дороги.
Поставленная цель достигается тем, что для определения параметров состояния рельсовой колеи дополнительно к измеряемым в способе-прототипе ширине рельсовой колеи и скорости движения измеряются угловые колебания и координаты буксы колесной пара, по которым рассчитываются координаты точек касания левого и правого колеса колесной пары, с использованием последних и происходит определение положения рельсовых нитей по уровню, просадок и направление рельсовых нитей в плане.
Реализация этого способа не требует разработки специальных вагонов-путеизмерителей, не накладывает ограничений на скорость движения. Аппаратура для реализации предлагаемого способа может быть размещена на любом локомотиве и, следовательно, предлагаемый способ может быть использован при штатной эксплуатации железной дороги для оперативного контроля состояния пути.
В качестве прототипа заявляемого устройства выбран компьютеризированный путеизмерительный вагон-лаборатория КВЛ-П [4]. Вагон КВЛ-П изготовлен на базе путеизмерителя ЦНИИ-2 дооснащением его бортовой автоматизированной системой измерений и оценки состояния рельсового пути. Введение в состав КВЛ-П бортового компьютера позволяет автоматизировать оценку состояния пути по геометрическим параметрам рельсовой колеи. В остальном описание КВЛ-П идентично описанию ЦНИИ-2.
К основным недостаткам прототипа можно отнести наличие контактирующих с рельсом первичных датчиков, применение которых накладывает ограничения на скорость движения состава, наличие сложных в эксплуатации и настройке механических передач в виде тяг и рычагов и обусловленная этим ограниченная надежность.
Целью предлагаемого изобретения является упрощение конструкции измерителя параметров содержания пути, повышение надежности, снятие ограничения на скорость движения, обеспечение оперативной оценки качества состояния железнодорожного пути в режиме нормальной эксплуатации железнодорожного транспорта.
Поставленная цель достигается тем, что в состав системы измерения дополнительно вводится инерциальный измерительный модуль (ИИМ), установленный на буксах колесной пары, содержащий, например, три ортогонально установленных линейных акселерометра и три ортогонально установленных датчика угловой скорости, при этом три составляющих линейных ускорений Wx,y,z и три составляющих угловых скоростей ωx,y,z в системе координат, связанной с буксой колесной пары, поступают в бортовой компьютер, где производится выработка углов колебаний буксы колесной пары, координат буксы колесной пары SB, SN, Sh и определение по ним искомых параметров содержания рельсовой колеи, при этом входы бортового компьютера соединены с выходами измерителя ширины рельсовой колеи, измерителя скорости и инерциального измерительного модуля, а с выхода бортового компьютера снимаются искомые значения параметров содержания рельсовой колеи.
Рассмотрим сущность предлагаемого способа. Способ состоит в определении искомых параметров железнодорожной колеи по информации о ширине рельсовой колеи, текущих координатах буксы колесной пары SB, SN, Sh (места установки ИИМ) и угловых колебаниях колесной пары, определяемых матрицей C
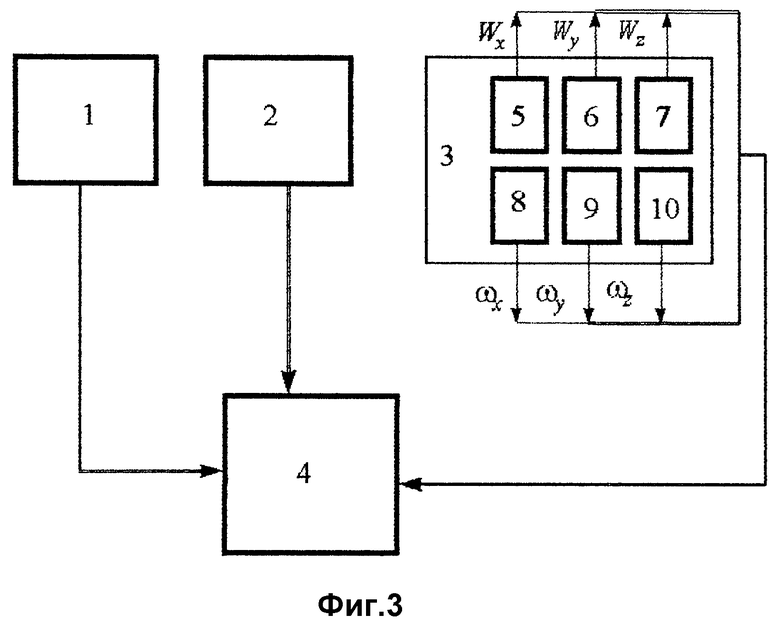
Определение текущих координат SB, SN, Sh буксы колесной пары, на которой устанавливается бескарданный инерциальный измерительный модуль (ИИМ), а также выработка параметров ориентации последней осуществляется по алгоритмам типа алгоритмов бескарданных инерциальных навигационных систем (БИНС). Рассмотрим более подробно алгоритмы работы используемого в предлагаемом способе ИИМ, построенного на датчиках угловых скоростей (ДУС). Напомним, что ИИМ в этом случае включает (фиг. 3) три датчика угловых скоростей ДУСx(8), ДУСy(9), ДУСz (10) и три линейных акселерометра Ax(5), Ay(6) и Az(7). Известно [9, 10, 11, 12], что выходной информацией вычислителя такого ИИМ являются:
K,ψ,θ - углы курса, килевой и бортовой качки, определяющие взаимную ориентацию правой ортогональной системы координат xyz, связанной с корпусом объекта (в случае установки ИИМ на буксу колесной пары оси этой системы координат вводятся следующим образом: ось x - совпадает с осью вращения колесной пары и направлена в сторону правого колеса относительно направления движения, ось z - проходит через ось вращения колесной пары и точку касания колеса с рельсом перпендикулярно оси x и направлена "вверх", ось y - дополняет трехгранник xyz до правого), и правого ортогонального горизонтного трехгранника ENh с географической ориентацией осей (ось h - совпадает с вертикалью места, ось N - лежит в плоскости горизонта и направлена на север, а ось E - на восток);
VE, VN, Vh - восточная, северная и вертикальная составляющие линейной скорости места установки ИИМ относительно Земли;
ϕ,λ,h - географические широта, долгота и высота места установки ИИМ соответственно.
Под введенными координатами SE, SN, Sh буксы колесной пары понимаются приращения на достаточно коротких интервалах времени, которые определяются измерительной базой каждого параметра [(t2-t1)=B/V, где V - скорость движения, B - измерительная база], плановых координат, которые в свою очередь связаны в приращениями географических координат следующими соотношениями:
SE(t) = [λ(t)-λ(t1)]•cosϕ(t1),
SN(t) = ϕ(t)-ϕ(t1),Sh(t) = h(t),t1≤t≤t2
Исходной информацией для выработки координат SB(t), SN(t) являются:
а) информация ИИМ:
составляющие nx, ny, nz вектора  кажущегося ускорения на оси трехгранника xyz;
кажущегося ускорения на оси трехгранника xyz;
составляющие ωx,ωy,ωz вектора  угловой скорости вращения трехгранника xyz на свои оси.
угловой скорости вращения трехгранника xyz на свои оси.
б) "внешняя" по отношению в ИИМ информация, например, от приемной аппаратуры (ПА) спутниковой навигационной системы (СНС) о составляющих V
Если посредством ДУС измеряются составляющие вектора  угловой скорости вращения связанной системы координат на ее оси, т.е. ωx,ωy,ωz, то элементы матрицы C
угловой скорости вращения связанной системы координат на ее оси, т.е. ωx,ωy,ωz, то элементы матрицы C
где кососимметрическая матрица, соответствующая вектору [ωx,ωy,ωz]T угловой скорости вращения трехгранника xyz; C
кососимметрическая матрица, соответствующая вектору [ωx,ωy,ωz]T угловой скорости вращения трехгранника xyz; C
Искомая матрица C
C
где
матрица C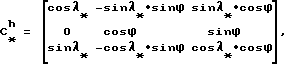
а
λ*= λ*(t0)+Ω•t+λ - инерциальная долгота места, Ω - угловая скорость суточного вращения Земли.
Выработка составляющих VB, VN, Vh, вектора  линейной скорости объекта в БИНС осуществляется по данным блока акселерометров, которые сначала преобразуются из осей связанного с корпусом объекта трехгранника xyz в оси горизонтной системы координат, а затем после компенсации "вредных" ускорений интегрируются, т.е. в соответствии с векторным дифференциальным уравнением [9, 10]:
линейной скорости объекта в БИНС осуществляется по данным блока акселерометров, которые сначала преобразуются из осей связанного с корпусом объекта трехгранника xyz в оси горизонтной системы координат, а затем после компенсации "вредных" ускорений интегрируются, т.е. в соответствии с векторным дифференциальным уравнением [9, 10]:
где - вектор кажущегося ускорения, измеряемый акселерометрами в системе координат xyz, вращающейся с угловой скоростью
- вектор кажущегося ускорения, измеряемый акселерометрами в системе координат xyz, вращающейся с угловой скоростью  ускорение силы тяжести,
ускорение силы тяжести,  относительные производные вектора
относительные производные вектора  в системе координат xyz.
в системе координат xyz.
Координаты SB, SN, Sh буксы колесной пары могут быть выработаны в соответствии с выражениями:
Определение положения рельсовых нитей по уровню и просадок каждой рельсовой нити поясняется фиг. 1. Здесь ИИМ - интерциальный измерительный модуль, Д1 и Д2 - датчики измерителя ширины колеи, измеряющие расстояния l1 и l2 до каждой рельсовой нити, т.е. до контролируемых точек A1 и A2. С учетом этого ширина L рельсовой колеи может быть определена по формуле
L = L0 + l1+l2,
где
L0 - постоянная база измерителя ширины колеи.
Положение датчиков Д1 и Д2 относительно места установки ИИМ (точка O) задается практически постоянными радиус-векторами  Тогда связь между координатами места установки ИИМ и координатами контролируемых точек касания рельсовых нитей можно задать, например, выражениями
Тогда связь между координатами места установки ИИМ и координатами контролируемых точек касания рельсовых нитей можно задать, например, выражениями
SjR = SB + c11 • (rjx + lj) + c12 • rjy + c13 • rjz,
SjN = SN + c21 • (rjx + lj) + c22 • rjy + c23 • rjz,
Sm = Sn + c31 • (rjx + lj) + c32 • rjy + c33 • rjz
где
Ckm(k, m = 1, 2, 3) - элементы матрицы Ch 0 направляющих косинусов углом между системой координат Oxyz, связанной с буксой колесной пары, и горизонтным координатным трехгранником OENh; rjx, rjy, rjz(j = 1, 2) - постоянные и заранее определенные проекции радиус-вектора  на оси системы координат Oxyz, связанной с буксой колесной пары; j = (1,2)- номер рельсовой нити.
на оси системы координат Oxyz, связанной с буксой колесной пары; j = (1,2)- номер рельсовой нити.
Положение рельсовых нитей по уровню в каждый момент времени t определяется как
Δ = S1h(t)-S2h(t)
или
Δ = L(t)•sinθ(t),
где
θ(t) - угол боковых колебаний колесной пары.
Просадки каждой рельсовой нити определяются как разность вертикальных координат точки касания j-го колеса в разные моменты времени:
Δj= Sjh(t2)-Sjh(t1),(j=1,2),
где
моменты времени t2 и t1 (точнее их разность) характеризуют расстояние или базу B = V • (t2-t1), на которой определяются просадки (V - скорость поезда).
Направление рельсовых нитей в плане характеризуется стрелами изгиба, измеренными от хорды S в точке, расположенной на расстоянии S1 от конца хорды (фиг. 2), т.е. длиной отрезка AM. Здесь точка M делит хорду M1M2 в заданном соотношении λ = S1/S-S1 (обычно λ = 1, т.е. точка M делит хорду пополам); точка A - есть точка пересечения перпендикуляра к хорде M1M2 в точке M с траекторией рельсовой нити в плане. Координаты точки M определяются как
Для λ = 1 (т.е. когда точка M - середина хорды) выражение (12) имеет вид
Уравнение прямой, проходящей через точку M и перпендикулярной отрезку M1M2, имеет вид
где
Имея траекторию рельсовой нити в плане [SE(t); SN(t)] и используя уравнение (14), можно найти точку пересечения перпендикуляра к хорде и траектории рельсовой нити, т.е. координаты контролируемой точки A  Наконец, стрела прогиба рельсовой нити в плане (на фиг. 2 длина отрезка AM) определится как
Наконец, стрела прогиба рельсовой нити в плане (на фиг. 2 длина отрезка AM) определится как
Таким образом, по информации о мгновенных значениях координат буксы колесной пары и угловых колебаний колесной пары рассчитываются все контролируемые параметры рельсовой колеи (за исключением ширины рельсовой колеи, измеряемой измерителем ширины рельсовой колеи).
Структурная схема заявляемого устройства, реализующая предлагаемый способ, изображена на фиг. 3. В состав устройства входят измеритель ширины рельсовой колеи (1), измеритель скорости (2), инерциальный измерительный модуль (3), установленный на буксу колесной пары, и бортовой компьютер (4). Входы бортового компьютера (4) соединены с выходами измерителя ширины рельсовой колеи (1), измерителя скорости (2) и инерциального измерительного модуля (3). В качестве измерителя скорости может быть использована, например, приемная аппаратура спутниковой навигационной системы.
Инерциальный измерительный модуль включает в себя, например, три ортогонально установленных линейных акселерометра (5, 6, 7) и три ортогонально установленных датчика угловой скорости (8, 9, 10), при этом три составляющих линейных ускорений Wx,y,z и три составляющих угловых скоростей ωx,y,z в системе координат, связанных с буксой колесной пары, поступает в бортовой компьютер (4), где производится выработка значений угловых колебаний колесной пары и текущих координат буксы колесной пары, по которым определяются параметры содержания пути. Функционирование инерциального измерительного модуля подробно описано в [5]. Инерциальный измерительный модуль, построенный на трех измерителях угловых ускорений, также применимый в данном случае, описан в [6]. Необходимо отметить, что в качестве инерциального модуля может быть использована инерциальная навигационная система любого типа, вырабатывающая координаты и углы наклоны места установки [7].
Функционирование устройства происходит следующим образом. Инерциальный измерительный модуль производит постоянное измерение трех составляющих линейных ускорений и угловых скоростей в системе координат, связанной с буксой колесной пары, при поступлении этой информации в бортовой компьютер в нем производится по алгоритмам (3) и (6) выработка текущих координат SB, SN, Sh буксы колесной пары и углов колебаний колесной пары. Выработка этих параметров производится при использовании информации о скорости, например, от ПА СНС и курсе. Информация о курсе может быть либо получена от ПА СНС при использовании спутниковой аппаратуры с разнесенными антеннами [8], либо является внутренней информацией устройства и снимается с плана железной дороги (заводится в виде массива в бортовой компьютер). Вычисление параметров содержания пути производится по выражениям (7)...(15), приведенным в описании способа. Отметим, что положение рельсовых нитей по уровню определяется по выражению (9) либо по выражению (10).
Таким образом алгоритмы работы компьютера заявляемого устройства, помимо алгоритмов, реализованных в компьютере устройства-прототипа, дополнительно включают:
алгоритмы ИИМ, основные из которых приведены в материале заявки, а также имеются в [6, 9] и условно состоят из алгоритмов;
предварительной обработки датчиков первичной информации;
выработки динамических параметров движения места установки ИИМ;
комплексной обработки информации;
алгоритмы выработки контролируемых параметров рельсовой колеи, которые приведены в описании заявки и условно состоят из алгоритмов;
определения координат точек касания левого и правого колеса колесной пары;
определения ширины рельсовой колеи;
определения взаимного положения рельсовых нитей по уровню (высоте) Δ;
определения местных просадок (горбов и впадин) каждой рельсовой нити Δ1 и Δ2;
определения положения рельсовых нитей по направлению в плане ΔA1 и ΔA2.
Источники информации:
1. Вершинский С. В., Данилов В.Н., Хусидов В.Д. Динамика вагона. - М.: Транспорт, 1991.
2. Клауз П.Л., Солофенко В.Н. Путеизмерительные тележки и вагоны железных дорог нормальной колеи. Учебное пособие. - Л. : ЛИИЖТ, 1966.
3. Исаев К. Г., Федулов В.Ф., Щекотов Ю.Н. Машинизация текущего содержания пути. Под ред. Соломонова С.А. - М.: Транспорт, с. 278-291.
4. Рекламный проспект КВЛ-П (приложен к заявке).
5. Анучин О.Н. и др. Начальная выставка и калибровка БИМ для систем управления движением судна. Гироскопия и навигация. ГНЦ РФ - ЦНИИ "Электроприбор". СПб N 4, 1994.
6. Анучин О.Н. и др. Инерциальный измерительный модуль интегрированного навигационного комплекса для морских судов. Гироскопия и навигация. ГНЦ РФ - ЦНИИ "Электроприбор". СПб. N 1, 1994
7. Инерциальные системы управлениям. Под ред. Питтмана Д. - М.: Оборонгиз. 1964.
8. Абросимов В. Н. и др. Испытания системы Навстар для определения угловой ориентации объектов. Зарубежная электроника, N 1, 1989.
9. Андреев В.Д. Теория инерциальной навигации. Кн.I. Автономные системы. - М.: Наука, 1966.
10. Броксмейер Ч.Ф. Системы инерциальной навигации. - Л.: Судостроение, 1967.
11. Дмитриев С.П.Высокоточная морская навигация. С.-Петербург: Судостроение, 1991.
12. Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация. - М.: Наука, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| ИЗМЕРИТЕЛЬ ФАКТИЧЕСКОЙ ОСТОЙЧИВОСТИ СУДНА | 1992 |
|
RU2057680C1 |
| СТАТОДИНАМИЧЕСКИЙ КРЕНОМЕТР | 1992 |
|
RU2057679C1 |
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| СПОСОБ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ НЕРОВНОСТЕЙ (РИХТОВКИ) И КРИВИЗНЫ В ПЛАНЕ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2276216C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Ж/Д | 2017 |
|
RU2676176C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2394120C2 |
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСАДКИ РЕЛЬСОВЫХ НИТЕЙ | 2003 |
|
RU2242554C2 |

Для осуществления контроля состояния рельсовой колеи определяют угловые колебания и координаты буксы колесной пары, характеризуемые матрицей направляющих косинусов углов между системой координат, связанной с буксой колесной пары, и горизонтным координатным трехгранником. Находят координаты точек касания левого и правого колес колесной пары. Положение рельсовых нитей по уровню выражают в виде разности вертикальных координат точек касания левого и правого колес. Просадку каждой рельсовой нити выражают в виде разности вертикальных координат точки касания колеса, соответствующих двум моментам времени. Устройство содержит инерциальный измерительный модуль, связанный с бортовым компьютером. Компьютер предназначен для вычисления положения рельсовых нитей по уровню, просадок рельсовых нитей и стрелы изгиба рельсовой нити по определенным с использованием алгоритма инерциальной навигации координатам точек касания левого и правого колес колесной пары, связанный с измерителем ширины рельсовой колеи и измерителем. Технический результат - повышение точности измерений. 2 с.п.ф-лы, 3 ил.
ΔA(t) = (SAe-SMe)2+(SAn-SMn)2.
2. Устройство для контроля рельсовой колеи, содержащее бортовой компьютер, предназначенный для вычисления положения рельсовых нитей по уровню, просадок рельсовых нитей и направления рельсовых нитей в плане, характеризующегося стрелой изгиба рельсовой нити, связанный с измерителем ширины рельсовой колеи и измерителем скорости движения, отличающееся тем, что оно снабжено установленным на буксе колесной пары инерциальным измерительным модулем, включающим в себя три ортогонально установленных линейных акселерометра и три ортогонально установленных датчика угловой скорости и связанным с бортовым компьютером, который предназначен для вычисления указанных параметров рельсовой колеи по определенным с использованием алгоритма инерциальной навигации координатам точек касания левого и правого колеса колесной пары, середины M хорды заданной длины и точки пересечения перпендикуляра, восставленного к хорде в точке M, и траектории рельсового пути.
| SU, 1671756 A1, 23.08.91 | |||
| SU, 1756192 A1, 23.08.92 | |||
| SU, 595194 A, 28.02.78 | |||
| SU, 569681 A, 25.08.77 | |||
| SU, 312914 A, 31.08.71. |
