Область техники, к которой относится изобретение
Изобретение относится к области железнодорожного транспорта и предназначена для контроля и оценки состояния железнодорожных путей посредством определения пространственных координат железнодорожного пути и их отличий от проектных координат, а именно к устройствам для контроля состояния рельсового пути.
Уровень техники
Известно устройство для контроля состояния рельсового пути (патент RU №110703, опубл. 27.11.2011 г.), содержащее два датчика вертикальных ускорений букс, установленных на корпусах букс одной из колесных пар в некотловой части вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова, установленных на наружной поверхности днища вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения ширины колеи, установленных на неподрессорной раме колесной тележки в некотловой части вагона-путеизмерителя, два датчика вертикальных перемещений букс относительно кузова, установленных на кузове вагона-путеизмерителя над буксами колесной пары в его некотловой части, датчик пройденного пути, установленный на корпусе одной из букс измерительной колесной пары, бесплатформенную инерциальную навигационную систему, установленную в некотловой части вагона-путеизмерителя, спутниковую навигационную систему, установленный на борту вагона-путеизмерителя контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину (ПЭВМ), первый и второй контроллеры, контроллер вычисления параметров пути, блок текущего времени, блок данных результатов контроля, принтер и пульт оператора, причем первый и второй датчики вертикальных ускорений букс подключены соответственно к первому и второму входам первого контроллера, первый и второй бесконтактные датчики оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова подключены соответственно к третьему и четвертому входам первого контроллера, первый и второй бесконтактные датчики оптического диапазона волн измерения ширины колеи подключены соответственно к пятому и шестому входам первого контроллера, первый и второй датчики вертикальных перемещений букс относительно кузова подключены соответственно к седьмому и восьмому входам первого контроллера, датчик пройденного пути подключен к первому входу ПЭВМ, вход и выход бесплатформенной инерциальной навигационной системы соединены соответственно с первым выходом и с первым входом второго контроллера, спутниковая навигационная система подключена к третьему входу второго контроллера, вход блока текущего времени соединен с первым входом ПЭВМ и с четвертым входом второго контроллера, второй выход ПЭВМ соединен с девятым входом первого контроллера и с пятым входом второго контроллера, входы-выходы первого и второго контроллеров соединены с входами-выходами контроллера вычисления параметров пути, вторые входы-выходы ПЭВМ соединены с входами-выходами блока данных результатов контроля, и третьи входы-выходы ПЭВМ соединены с входами-выходами пульта оператора, второй выход ПЭВМ подключен к принтеру, причем устройство содержит пульт отметок путевых событий, выход которого соединен со вторым входом второго контроллера, а вход пульта отметок путевых событий соединен со вторым выходом второго контроллера.
Недостатком указанного устройства для контроля состояния рельсового пути является установка инерциальной навигационной гиросистемы на кузове вагона, т.е. вписывание ее в путь по хорде длиной около 19 метров, что затрудняет определение пространственных координат в кривых участках железнодорожного пути малого радиуса.
Раскрытие изобретения
Технический результат заключается в создание устройства контроля и оценки состояния железнодорожных путей, позволяющего при движении вагона-путеизмерителя со скоростью до 250 км/ч измерить с высокой точностью и достоверностью истинные геометрические параметры пути и вычислить комплексные характеристики динамического взаимодействия рельсового пути и подвижного состава в том числе определяя пространственные координаты железнодорожного пути.
Результат достигается заявленным устройством для контроля состояния рельсового пути, который содержит два датчика вертикальных ускорений букс, установленных на корпусах букс одной из колесных пар в некотловой части вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова, установленных на наружной поверхности днища вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения ширины колеи, установленных на неподрессорной раме колесной тележки в некотловой части вагона-путеизмерителя, два датчика вертикальных перемещений букс относительно кузова, установленных на кузове вагона-путеизмерителя над буксами колесной пары в его некотловой части, датчик пройденного пути, установленный на корпусе одной из букс измерительной колесной пары, бесплатформенное инерциальное навигационное средство, установленное в некотловой части вагона-путеизмерителя, спутниковое навигационное средство, установленное на борту вагона-путеизмерителя контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину, первый и второй контроллеры, контроллер вычисления параметров пути, блок текущего времени, блок данных результатов контроля, принтер и пульт оператора, причем первый и второй датчики вертикальных ускорений букс подключены соответственно к первому и второму входам первого контроллера, первый и второй бесконтактные датчики оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова подключены соответственно к третьему и четвертому входам первого контроллера, первый и второй бесконтактные датчики оптического диапазона волн измерения ширины колеи подключены соответственно к пятому и шестому входам первого контроллера, первый и второй датчики вертикальных перемещений букс относительно кузова подключены соответственно к седьмому и восьмому входам первого контроллера, датчик пройденного пути подключен к первому входу персональной электронно-вычислительной машины, вход и выход бесплатформенного инерциального навигационного средства соединены соответственно с первым выходом и с первым входом второго контроллера, спутниковое навигационное средство подключено к третьему входу второго контроллера, вход блока текущего времени соединен с первым входом персональной электронно-вычислительной машины и с четвертым входом второго контроллера, второй выход персональной электронно-вычислительной машины соединен с девятым входом первого контроллера и с пятым входом второго контроллера, входы-выходы первого и второго контроллеров соединены с входами-выходами контроллера вычисления параметров пути, вторые входы-выходы персональной электронно-вычислительной машины соединены с входами-выходами блока данных результатов контроля, и третьи входы-выходы персональной электронно-вычислительной машины соединены с входами-выходами пульта оператора, второй выход персональной электронно-вычислительной машины подключен к принтеру, кроме того содержит пульт отметок путевых событий, выход которого соединен со вторым входом второго контроллера, а вход пульта отметок путевых событий соединен со вторым выходом второго контроллера, при этом дополнительно на неподрессоренной части ходовой тележке некотлового конца вагона на правом и левом буксовом узле одной колесной пары установлены два бесплатформенных инерциальных навигационных средства на микромеханических датчиках, подключенные к спутниковому навигационному средству и к управляющему компьютеру бесплатформенных инерциальных навигационных средств на микромеханических датчиках, который подключен к персональной электронно-вычислительной машине.
Краткое описание чертежей
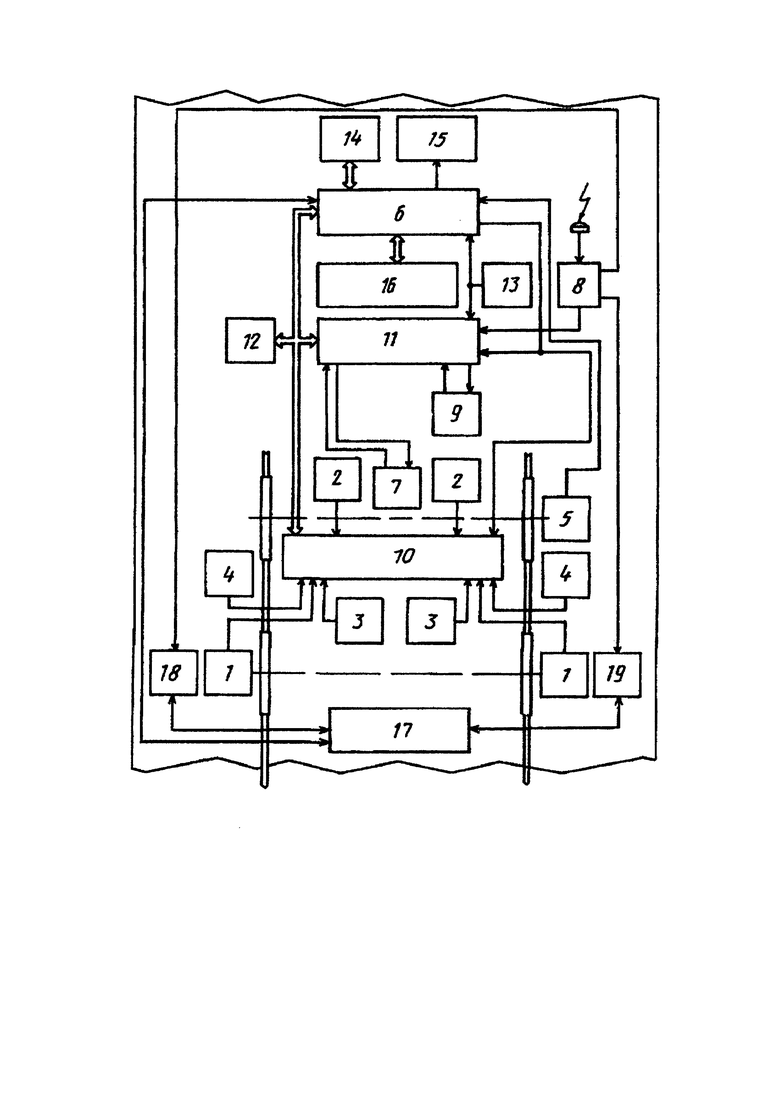
Сущность изобретения поясняется фигурой, на которой изображена схема заявленного устройства для контроля состояния рельсового пути.
Осуществление изобретения
Устройство для контроля состояния рельсового пути (см. фигуру) размещено на вагоне-путеизмерителе (ВПИ) и содержит два датчика 1 вертикальных ускорений букс (ВУБ), два бесконтактных датчика 2 оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова (РК), два бесконтактных датчика 3 оптического диапазона длин волн измерения ширины колеи (ШК), два датчика 4 вертикальных перемещений букс относительно кузова (БК) и датчик 5 пройденного пути (ДПП), персональную электронно-вычислительную машину (ПЭВМ) 6, бесплатформенное инерциальное навигационное средство (БИНС) 7, спутниковое навигационное средство (СНС) 8, пульт регистрации путевых событий 9, первый и второй контроллеры 10 и 11, контроллер 12 вычисления параметров пути (КВПП), блок 13 текущего времени (БТВ), блок 14 данных результатов контроля (БДРК), принтер 15 и пульт 16 оператора. ПЭВМ 6, контроллеры 10 и 11, КВПП 12, БТВ 13, БДРК 14, принтер 15 и пульт 16 оператора входят в состав контрольно-вычислительного комплекса. В устройстве для контроля состояния рельсового пути (см. фигуру) два датчика 1 ВУБ установлены на корпусах букс одной из колесных пар в некотловой части ВПИ, два датчика 2 РК установлены на наружной поверхности днища ВПИ, два датчика 3 ШК установлены на неподрессоренной раме колесной тележки в некотловой части ВПИ, два датчика 4 БК и датчик 5 ДНИ установлены на кузове вагона-путеизмерителя над буксами колесной пары в его некотловой части. Контрольно-вычислительный комплекс установлен на борту ВПИ, который включает ПЭВМ 6, контроллеры 10, 11, КВПП 12, БТВ 13, БДРК 14, принтер 15 и пульт 16 оператора. Первый и второй датчики 1 ВУБ подключены соответственно к первому и второму входам первого контроллера 10, первый и второй датчики 2 РК подключены соответственно к третьему и четвертому входам контроллера 10, первый и второй датчики 3 ШК подключены соответственно к пятому и шестому входам контроллера 10, первый и второй датчики 4 БК подключены соответственно к седьмому и восьмому входам контроллера 10, датчик 5 ДПП подключен к первому входу ПЭВМ 6, вход и выход БИНС 7 соединены соответственно с первым выходом и с первым входом контроллера 11, второй вход и второй выход которого соединены соответственно с выходом и входом пульта регистрации путевых событий. СНС 8 подключена к третьему входу контроллера 11, выход БТВ 13 соединен с вторым входом ПЭВМ бис четвертым входом контроллера 11, второй выход ПЭВМ 6 соединен с девятым входом контроллера 10 и с пятым входом контроллера 11. Первые входы-выходы ПЭВМ 6, входы-выходы контроллеров 10 и 11 соединены с входами-выходами КВПП 12, вторые и третьи входы-выходы ПЭВМ 6 соединены соответственно с входами-выходами БДРК 14 и с входами-выходами пульта 16 оператора. Второй выход ПЭВМ 6 подключен к принтеру 15. Кроме того, дополнительно на неподрессоренной части ходовой тележке некотлового конца вагона на правом и левом буксовом узле одной колесной пары установлены два бесплатформенных инерциальных навигационных средства на микромеханических датчиках 18 и 19, подключенные к спутниковому навигационному средству 8 и к управляющему компьютеру бесплатформенных инерциальных навигационных средств на микромеханических датчиках 17, который подключен к персональной электронно-вычислительной машине 6.
Бесплатформенное инерциальное навигационное средство на микромеханических датчиках 18, установленное на левом буксовом узле некотловой тележки вагона.
Бесплатформенное инерциальное навигационное средство на микромеханических датчиках 19, установленное на правом буксовом узле некотловой тележки вагона.
Устройство для контроля состояния рельсового пути работает следующим способом.
С пульта 16 оператора вводят в БИНС 7 через контроллер 11 географические координаты и высоту над уровнем моря места старта. Географические координаты места старта либо вычисляются СНС 8, либо берутся, как и высота над уровнем моря, из априорных данных. Получив, запомнив и обработав данные привязки к местности, БИНС 7 переходит в режим измерения.
Перед началом движения ВПИ производят предстартовую калибровку комплекса на участке рельсового пути, геометрические параметры которого известны. Калибровочные параметры запоминают.
В процессе движения датчики 1 ВУБ формируют в реальном времени сигналы, текущие значения которых пропорциональны проекции действующих ускорений в системе "поверхность катания - колесо" на вертикаль, лежащую в плоскости вращения колеса. Сигналы с выхода датчиков 1 ВУБ имеют полосу до 20 кГц, они поступают на соответствующий вход контроллера 10, где преобразуются в цифровую форму и привязываются на момент поступления к текущим значениям пройденного пути.
Пройденный путь измеряют в реальном времени с помощью датчика 5 ДПП, установленного на корпусе одной из букс измерительной колесной пары, с которой кинематически связан его входной вал. Датчик 5 ДПП формирует последовательность импульсов, частота следования которых пропорциональна скорости движения ВПИ, а также потенциальный сигнал направления движения. Сигналы с датчика 5 ДПП поступают на ПЭВМ 6, где масштабируются уменьшением частоты следования импульсов с целью оптимизации измерительно-вычислительного процесса по критерию "точность - достоверность". Далее масштабированные импульсы датчика 5 ДПП поступают на соответствующие входы контроллеров 10 и 11, которые синхронно подсчитывают число поступивших импульсов и формируют код пройденного пути с учетом направления движения.
Датчики измерения расстояний РК, ШК и БК до соответствующих поверхностей головок рельсов циклически, асинхронно по отношению друг к другу, БИНС 7 и ДПП 5, формируют в реальном времени информационные посылки с текущими значениями параметров соответствующих радиусов-векторов R1…R8, которые экстраполированы на момент выдачи. Частота следования посылок может достигать 1,25 кГц. Информационные посылки от датчиков измерений расстояний РК, ШК и БК поступают на соответствующие входы контроллера 10, где каждая из посылок индивидуально привязывается к текущему значению пройденного пути и запоминается.
БИНС 7 содержит три датчика угла, выполненных в виде лазерных гироскопов, и три датчика линейных ускорений. Оси чувствительности датчиков расположены вдоль соответствующих осей связанной системы координат, начало которой является фокусом БИНС 7. Микроконтроллер, входящий в состав БИНС 7, преобразует аналоговые сигналы датчиков в цифровую форму, а так же вычисляет производные параметры.
Информация из БИНС 7 выдается в реальном времени в контроллер 11 циклически с частотой до 250 Гц в виде текущих значений вычисленных (экстраполированных) на момент выдачи навигационных параметров движения ВПИ в связанной системе координат (х, у, z): углы азимута, крена и тангажа, продольное, поперечное и нормальное ускорения вдоль соответствующих осей, широту, долготу и высоту места, скорость движения. Контроллер 11 принимает данные от БИНС 7, причем каждое принятое текущее значение привязывается на момент поступления к текущему значению пройденного пути, а текущие значения ускорений привязываются дополнительно к текущему значению времени. Текущие значения времени формируются БТВ 13, они поступают на контроллер 11 и ПЭВМ 6. Привязанные значения запоминаются.
Текущие значения географических координат (широта и долгота места) поступают от СНС 8 на контроллер 11, где привязываются на момент поступления к текущим значениям пройденного пути и времени.
Оператор, обслуживающий пульт отметок путевых событий 9, в процессе движения ВПИ вводит сигналы о прохождении какого-то события (километровой отметки, стрелки, моста и т.п.), например, нажимая на соответствующую кнопку, расположенную на пульте. Таким образом, при прохождении очередного путевого события, формируется сигнал идентификации, который передается в контроллер И, где привязывается на момент поступления к текущему значению пройденного пути.
В процессе приема данных контроллеры 10 и 11 формируют информационные пакеты данных, привязанных к текущим значениям пройденного пути и времени, которые в квазиреальном времени и произвольном порядке поступают по сети в два адреса: в ПЭВМ 6, для запоминания в БДРК 14 в качестве исходной информации, и в КВПП 12 - для последующей обработки. В пределах одного пакета данные оптимизированы (исключены повторяющиеся и маловероятные значения) и размещены в порядке поступления. ПЭВМ 6 предотвращает переполнение буферов КВПП 12, по требованию последнего уменьшая частоту следования импульсов от ДПП 5, транслируемых контроллерам 10 и 11, исключая таким образом потерю данных ценой временного понижения точности привязки к текущему значению пройденного пути. По мере освобождения буферов заданная точность привязки восстанавливается. Таким образом реализуется механизм изменения интервала квантования пройденного пути по критерию "точность-достоверность".
КВПП 12 в квазиреальном времени принимает и обрабатывает методами интерполяции и экстраполяции пакеты исходных данных, приводя их к последовательности блоков данных, привязанных к последовательности директивных отрезков пути (например, 0,25 м), пройденных осью измерительной колесной пары с учетом размещения относительно нее датчиков измерения расстояний РК, ШК и БК, БИНС 7 и ВУБ 1 на кузове ВПИ.
Затем КВПП 12 в квазиреальном времени преобразует исходную директивную последовательность блоков данных в последовательность блоков координат положения ВПИ в инерциальном пространстве как последовательность блоков координат положения фокуса БИНС 7 - начала связанной системы координат (х, у, z) ВПИ.
Далее КВПП 12 в квазиреальном времени преобразует исходную директивную последовательность блоков данных и последовательность блоков координат положения ВПИ в инерциальном пространстве в последовательность блоков координат положения в инерциальном пространстве начала связанной системы координат (s, h, l) рельсового пути и координат верхних и внутренних боковых поверхностей головок рельсов 17 и 18 в связанной системе координат рельсового пути.
По вычисленным директивным координатам положения ВПИ и рельсового пути в пространстве КВПП 12 вычисляет в квазиреальном времени комплекс геометрических параметров рельсового пути, производит анализ и оценку его состояния, а результаты передает по сети в ПЭВМ 6 для запоминания в БДРК 14 и распечатки в темпе движения ВПИ на принтере 15.
Масштабирование результатов контроля по отметкам, введенным оператором с пульта отметок путевых событий 9 и уточнение географических координат пути по данным СНС 8 производят на ПЭВМ 6 в нереальном времени в темпе движения ВПИ.
Кроме того, в соответствии завяленным устройством географические координаты места старта ВПИ определяются спутниковым навигационным средством (встроенным в него приемником), входящим в состав комплекса. Далее производится начальная выставка бесплатформенных инерциальных навигационных средств на микромеханических датчиках 18 и 19, установленных на правом и левом буксовом узле одной колесной пары. Начальная выставка заключается в определении углов ориентации измерительных осей системы относительно плоскости горизонта. После завершения начальной выставки система автоматически переходит в режим счисления изменения угловых координат относительно начальных значений. Далее определенные угловые координаты каждого буксового узла передаются в управляющий компьютер бесплатформенных инерциальных навигационных средств на микромеханических датчиках 17 для построения неровностей правой и левой рельсовой нитей в горизонтальной и вертикальной плоскости. После чего горизонтальные и вертикальные неровности для каждой рельсовой нити описываются на базе тележки.
В процессе движения вагона-путеизмерителя циклически измеряют в реальном масштабе времени текущие значения пройденного пути, текущие значения высоты неровностей на поверхности катания рельсов, текущие значения параметров радиусов-векторов, текущие значения углов ориентации вагона-путеизмерителя в географической системе координат и ускорений в направлении осей связанной системы координат ВПИ. Далее регистрируют в процессе движения ВПИ факты прохождения путевых отметок, например, мостов, километровых отметок, стрелок и т.п. После запоминают полученные текущие значения. Далее циклически измеряют в реальном времени текущие значения географических координат. Привязывают измеренные параметры пути к текущему значению пройденного пути и географическим координатам. Запоминают привязанные значения. Экстраполируют на момент выдачи текущие значения. Обрабатывают привязанные текущие значения в квазиреальном масштабе времени методами интерполяции и экстраполяции, преобразуя их в последовательность блоков данных, приведенных к вертикальной плоскости, которой принадлежат начало связанной системы координат рельсового пути и ось измерительной колесной пары, и привязанных к последовательности директивных отрезков пути, пройденных этой осью. Преобразовывают последовательность блоков данных в последовательность блоков координат положения ВПИ в инерциальном пространстве, совместив начало связанной системы координат с фокусом БИНС. Преобразовывают последовательность блоков данных в последовательность блоков координат в связанной системе координат рельсового пути, определяя положение верхних поверхностей правой и левой головок рельсов в пространстве. Вычисляют комплекс геометрических параметров рельсового пути, используя полученные координаты положения в пространстве ВПИ и координаты верхних и внутренних боковых поверхностей головок рельсов. Производят анализ состояния рельсового пути и его оценку. Запоминают полученные результаты.
Одновременно в процессе движения вагона-путеизмерителя циклически измеряют в реальном масштабе времени текущие значения параметров радиусов-векторов, текущие значения углов ориентации левой и правой буксы некотловой ходовой тележки вагона-путеизмерителя, на которых установлены два бесплатформенных инерциальных навигационных средства на микромеханических датчиках. Вычисляют три комплекса геометрических параметров рельсового пути, один используя полученные координаты положения в пространстве ВПИ от бесплатформенного инерциального навигационного средства, установленного в кузове вагона-путеизмерителя, дающий координаты оси пути, выглаженные хордой 19 метров, два других комплекса геометрических параметров рельсового пути -это координаты верхних и внутренних боковых поверхностей левой и правой головок рельсов, полученные от бесплатформенных инерциальных навигационных средства на микромеханических датчиках, установленных на буксах. Для повышение точности измерения измерены радиусы-векторы, связывающие фокусы всех трех инерциальных систем, корректность изменения которых отслеживается центральной ПЭВМ, и, при необходимости производится оптимальная коррекция геометрических параметров пути. Производят анализ комплексов геометрических параметров состояния рельсового пути и дают его оценку. Запоминают полученные результаты.
Измерение горизонтальных и вертикальных неровностей для каждой рельсовой нити на базе тележки и при движении ВПИ со скоростью до 250 км/ч позволяет производить анализ состояния рельсового пути, а также обосновывать планирование мероприятий по его ремонту. Достоинством этого устройства являются установленные инерциальные навигационные средства на микромеханических датчиках, на правом и левом буксовом узле одной колесной пары, в дополнение к инерциальному навигационному средству, установленному в кузове ВПИ, это позволяет определять натурные неровности и положение каждой рельсовой нити в пространстве как на хорде длиной менее 2.4 метра, так и на хорде 19,4 метра, что дает возможность провести более тонкий анализ расстройств пути и дать рекомендации по его устранению.
Вышеперечисленное обуславливает практическую применимость изобретения.
Современные технологии и оборудование позволяют осуществить настоящее изобретение в крупносерийном производстве. На заводе или предприятии имеется все необходимое оборудование для производства заявленного устройства для контроля состояния рельсового пути.
Заявленное устройство для контроля состояния рельсового пути выполнено в виде единой конструкции, а именно отдельные компоненты (или составные части) заявленного устройства соединены между собой на одном предприятии-изготовителе (или заводе-изготовителе) сборочными операциями, такими как свинчивание, сочленение, клепка, сварка, пайка, опрессовка, развальцовка и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2270774C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| СПОСОБ КОРРЕКЦИИ ДАТЧИКА ПРОЙДЕННОЙ ДИСТАНЦИИ | 2003 |
|
RU2243505C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| Способ комплексирования бесплатформенных инерциальных навигационных систем | 2019 |
|
RU2708901C1 |
| СПОСОБ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ НЕРОВНОСТЕЙ (РИХТОВКИ) И КРИВИЗНЫ В ПЛАНЕ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2276216C2 |
Изобретение относится к устройствам для контроля состояния рельсового пути. Устройство для контроля состояния рельсового пути содержит два датчика вертикальных ускорений букс, два бесконтактных датчика оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова, два бесконтактных датчика оптического диапазона длин волн измерения ширины колеи, два датчика вертикальных перемещений букс относительно кузова, датчик пройденного пути, бесплатформенное инерциальное навигационное средство, спутниковое навигационное средство, контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину, первый и второй контроллеры, контроллер вычисления параметров пути, блок текущего времени, блок данных результатов контроля, принтер и пульт оператора, кроме того, содержит пульт отметок путевых событий. Дополнительно на неподрессоренной части ходовой тележки некотлового конца вагона на правом и левом буксовом узле одной колесной пары установлены два бесплатформенных инерциальных навигационных средства на микромеханических датчиках, подключенные к спутниковому навигационному средству и к управляющему компьютеру бесплатформенных инерциальных навигационных средств на микромеханических датчиках, который подключен к персональной электронно-вычислительной машине. В результате с высокой точностью и достоверностью определяются геометрические параметры пути и вычисляются комплексные характеристики динамического взаимодействия рельсового пути и подвижного состава. 1 ил.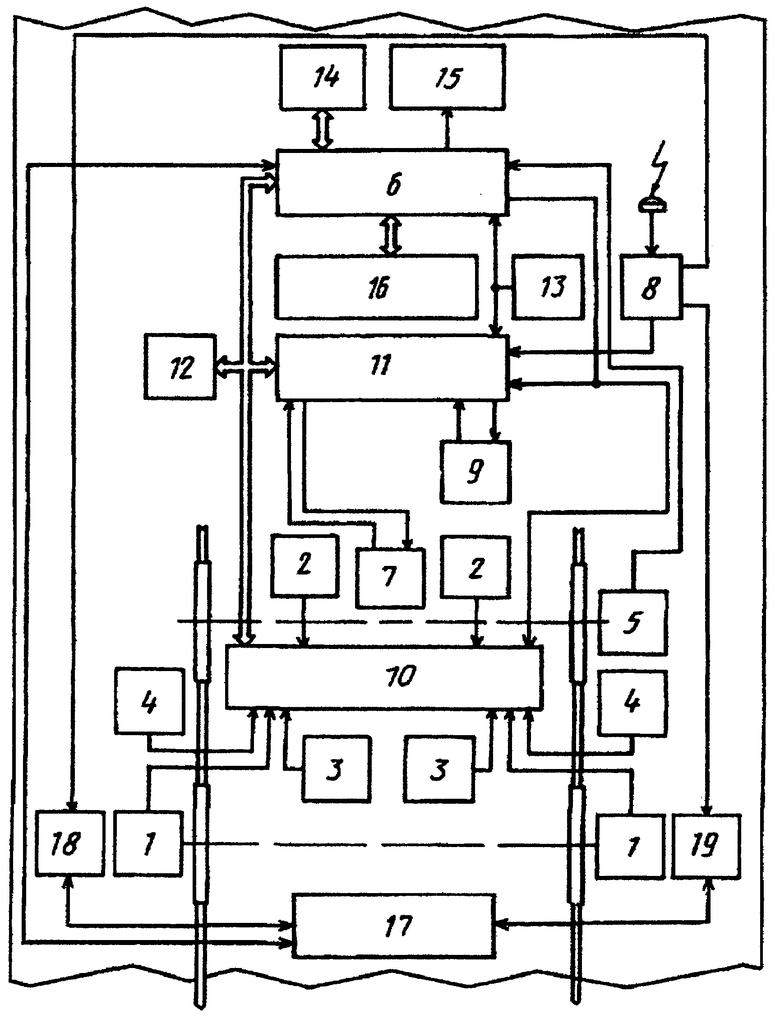
Устройство для контроля состояния рельсового пути, содержащее два датчика вертикальных ускорений букс, установленных на корпусах букс одной из колесных пар в некотловой части вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова, установленных на наружной поверхности днища вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения ширины колеи, установленных на неподрессорной раме колесной тележки в некотловой части вагона-путеизмерителя, два датчика вертикальных перемещений букс относительно кузова, установленных на кузове вагона-путеизмерителя над буксами колесной пары в его некотловой части, датчик пройденного пути, установленный на корпусе одной из букс измерительной колесной пары, бесплатформенное инерциальное навигационное средство, установленное в некотловой части вагона-путеизмерителя, спутниковое навигационное средство, установленное на борту вагона-путеизмерителя, контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину, первый и второй контроллеры, контроллер вычисления параметров пути, блок текущего времени, блок данных результатов контроля, принтер и пульт оператора, причем первый и второй датчики вертикальных ускорений букс подключены соответственно к первому и второму входам первого контроллера, первый и второй бесконтактные датчики оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова подключены соответственно к третьему и четвертому входам первого контроллера, первый и второй бесконтактные датчики оптического диапазона волн измерения ширины колеи подключены соответственно к пятому и шестому входам первого контроллера, первый и второй датчики вертикальных перемещений букс относительно кузова подключены соответственно к седьмому и восьмому входам первого контроллера, датчик пройденного пути подключен к первому входу персональной электронно-вычислительной машины, вход и выход бесплатформенного инерциального навигационного средства соединены соответственно с первым выходом и с первым входом второго контроллера, спутниковое навигационное средство подключено к третьему входу второго контроллера, вход блока текущего времени соединен с первым входом персональной электронно-вычислительной машины и с четвертым входом второго контроллера, второй выход персональной электронно-вычислительной машины соединен с девятым входом первого контроллера и с пятым входом второго контроллера, входы-выходы первого и второго контроллеров соединены с входами-выходами контроллера вычисления параметров пути, вторые входы-выходы персональной электронно-вычислительной машины соединены с входами-выходами блока данных результатов контроля и третьи входы-выходы персональной электронно-вычислительной машины соединены с входами-выходами пульта оператора, второй выход персональной электронно-вычислительной машины подключен к принтеру, кроме того, содержит пульт отметок путевых событий, выход которого соединен со вторым входом второго контроллера, а вход пульта отметок путевых событий соединен со вторым выходом второго контроллера, отличающееся тем, что дополнительно на неподрессоренной части ходовой тележки некотлового конца вагона на правом и левом буксовом узле одной колесной пары установлены два бесплатформенных инерциальных навигационных средства на микромеханических датчиках, подключенные к спутниковому навигационному средству и к управляющему компьютеру бесплатформенных инерциальных навигационных средств на микромеханических датчиках, который подключен к персональной электронно-вычислительной машине.
| Разборный плавучий причал | 1957 |
|
SU110703A1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2270774C2 |
| Контактное устройство | 1944 |
|
SU65501A1 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |

