Использование: для измерения геометрических параметров рельсового пути. Сущность изобретения: способ заключается в том, что измеряют при помощи инерциальной навигационной системы, установленной над шкворнем измерительной тележки путеизмерительного вагона, углы ориентации и вектор скорости кузова вагона, при помощи датчиков букса-кузов скорости движения букс относительно кузова, при помощи датчиков угловых перемещений скорость вращения измерительной тележки вокруг шкворня, а также скорости перемещения букс относительно рельс при помощи датчиков букса-рельс. По полученной информации формируют вектор виртуальной скорости каждой из рельсовых нитей в проектной системе координат, далее, используя сигналы с датчика пути, переходят от независимой переменной по времени к независимой переменной по продольной координате пути, вертикальные и горизонтальные профили рельсовых нитей получают интегрированием найденных скоростей, далее определяют неровности рельсовых нитей как разность между подученными профилями и их аппроксимирующими кривыми, полученными в результате обработки.
Изобретение относится к контролю состояния железнодорожного пути и может быть использовано для оценки и прогноза этого состояния.
Известны инициальные способы измерения параметров движения путеизмерительного вагона (1. Б.Н.Зензинов, В.В.Мишин, В.О.Певзнер, П.Н.Кулешов. Вагон - путеизмеритель нового поколения// Железнодорожный транспорт. - 1998. - №11, - С.17-21; 2.  Martin Rechel und Heinz-Herbert
Martin Rechel und Heinz-Herbert  Die Oberbau-
Die Oberbau- -Einheit - Neuer Standard
-Einheit - Neuer Standard  die
die  41, Н. 6-Juni, 1992, S. 405-411), заключающиеся в том, что при помощи инерциальной навигационной системы (ИНС) измеряются углы ориентации кузова вагона и вектор скорости его движения, а информация о геометрических параметрах рельсового пути вырабатывается по результатам относительных измерений перемещений рельсовых нитей относительно кузова вагона.
41, Н. 6-Juni, 1992, S. 405-411), заключающиеся в том, что при помощи инерциальной навигационной системы (ИНС) измеряются углы ориентации кузова вагона и вектор скорости его движения, а информация о геометрических параметрах рельсового пути вырабатывается по результатам относительных измерений перемещений рельсовых нитей относительно кузова вагона.
Недостатком приведенных способов является использование хордовых методов, следствием чего является неравномерный характер передаточных функций и, как следствие, искажение измерительной информации.
Задачей изобретения является создание универсального способа измерения неровностей рельсового пути, передаточная характеристика которого не зависит от длины неровностей (точечного способа измерения).
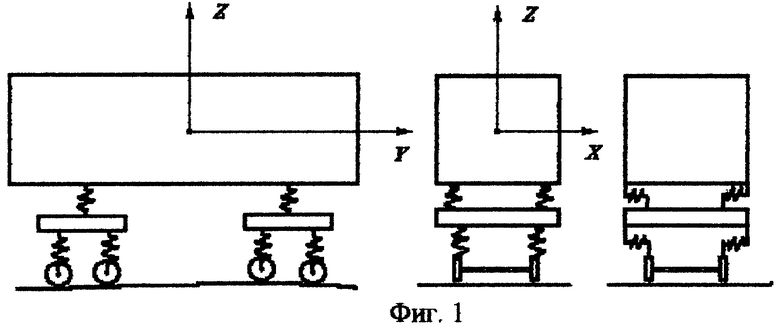
Для решения поставленной задачи анализа и синтеза путеизмерительной системы с использованием углов и скоростей, вырабатываемых ИНС, необходимо прежде всего рассмотреть кинематическую схему подвески вагона и расположения датчиков относительных перемещений. При расчете динамики вагона используются достаточно сложные кинематические схемы, позволяющие исследовать механические колебания движущихся вагонов с одинарным или двойным рессорным подвешиванием кузова. Упрощенная схема подвески кузова для решения нашей задачи может быть принята в виде, представленном на фиг.1.
При расчетах будем учитывать следующие особенности строения рельсового пути. В плане рельсовый путь состоит из чередующихся прямолинейных отрезков пути и круговых кривых, состыкованных так называемыми переходными кривыми. Могут быть также несколько кривых разного радиуса подряд. Кривизна пути в плане на переходном участке изменяется от нуля до номинального значения по линейному закону, рельс при этом имеет форму радиоидальной спирали. Что касается вертикального профиля, то проектные изменения наклона пути имеют ломаный профиль, состоящий из прямолинейных отрезков.
Эта особенность строения пути позволяет разбить трассу на отдельные участки и рассматривать три типа движения путеизмерительного средства по типу контролируемого отрезка пути:
а) движение по прямолинейному пути;
б) движение по криволинейному отрезку;
в) движение по переходному криволинейному участку.
Тогда можно аппроксимировать результаты контроля соответствующей функциональной зависимостью, рассчитывая неровности как отклонения от аппроксимирующей линии.
Заметим также что на прямых участках пути рельсовые нити должны находиться на одном уровне. Иногда на длинных прямых участках для уменьшения амплитуды виляния кузова одну рельсовую нить содержат на 5 мм выше другой (на двухпутных участках - с внешней стороны). В круговой кривой рельсовая колея имеет возвышение наружного рельса над внутренним, который остается на прежней высоте (в метрополитене наружный рельс поднимают, а внутренний опускают на половину возвышения). Таким образом, обеспечивается равенство средних вертикальных нагрузок от колес на оба рельса и уменьшение поперечных сил, передаваемых рельсам.
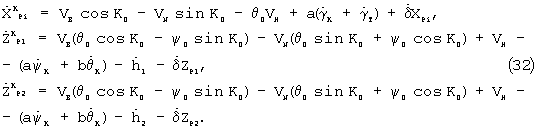
Для определения взаимного расположения и движения кузова, элементов измерительной тележки и рельсов введем следующие системы координат (фиг.2).
OXYZ - неподвижную проектную систему координат (ПСК). Ее начало О находится на оси колеи и совпадает с текущей контрольной точкой. Ось OY совпадает с проектным направлением оси колеи, ОХ лежит в плоскости колеи перпендикулярно оси OY и OZ перпендикулярна проектной плоскости пути.
oxyz - связанная с кузовом вагона (точка о совпадает с центром масс кузова, ось oy совпадает с продольной осью вагона, oz перпендикулярна плоскости пола кузова, ох образует правую систему координат).
o1x’y’z’ - связанная с ИНС. Начало координат находится в точке установки ИНС, оси параллельны осям вагона (в дальнейшем будем считать, что точка o1 совпадает с точкой пересечения пола кузова и оси шкворня).
ИНС измеряет углы курса К, тангажа ψ и крена θ кузова, которые могут быть представлены как
K=K0-γ k; ψ =ψ 0+ψ k; θ =θ 0+θ k, (1)
где К0, ψ 0, θ 0 - углы ориентации ПСК относительно географической системы координат, γ k, ψ k, θ k - углы качки кузова относительно ПСК. Отметим, что в соотношении (1) углы К и К0 имеют положительное значение при повороте кузова и рельсового пути относительно плоскости меридиана по часовой стрелке, а положительному значению угла γ k соответствует отклонение кузова от ПСК против часовой стрелки.
Будем считать, что на кузове в точках Кi (i=1,... ,4) расположены датчики перемещений букс относительно кузова (БК), а на соответствующих буксах, рельсов относительно кузова (РК). Это могут быть электромеханические, фотооптические или лазерные сканирующие датчики перемещений, также с лазерными триангуляционными датчиками букса-рельс (БР).
По информации о скорости движения точки o1 установки ИНС, взаимном положении и скоростей перемещения кузова, элементов ходовой тележки и рельсов, получаемой с датчиков БК и БР, могут быть определены виртуальные скорости движения контрольных точек правого и левого рельсов относительно ПСК. Вертикальные и горизонтальные профили рельсовых нитей получаются интегрированием найденных скоростей. Начальные значения координат, проектные величины К0 и ψ 0, а также средние линии, относительно которых определяются неровности рельсов, могут быть определены с использованием баз данных и аппроксимации по результатам измерений.
Перейдем к получению соответствующих зависимостей. Положение центра масс кузова о относительно ПСК характеризуется радиусом-вектором  (фиг.2). Взаимное расположение центра масс кузова, точки o1 установки ИНС и точек Ki крепления датчиков БК определяется векторами
(фиг.2). Взаимное расположение центра масс кузова, точки o1 установки ИНС и точек Ki крепления датчиков БК определяется векторами  ,
,  и
и  , причем
, причем

где i=1,... ,4.
Скорости точек крепления датчиков БК определяются выражением

Проектируя векторное равенство (3) на оси ПСК, с учетом малости углов γ k, ψ k, θ k в уравнении (1), получим

где

Вектор скорости, измеряемый ИНС, определяется соотношением

Подстановка в выражение (4) соотношения (2) с учетом формулы (6) дает

Запишем уравнение (7) в проекциях на оси ПСК. Скорость  в этом случае может быть выражена через определяемые ИНС проекции VN, VE и VH скорости движения точки о1 на оси географического сопровождающего трехгранника (ГСТ) как
в этом случае может быть выражена через определяемые ИНС проекции VN, VE и VH скорости движения точки о1 на оси географического сопровождающего трехгранника (ГСТ) как

где  - матрица перехода из ГСТ в ПСК.
- матрица перехода из ГСТ в ПСК.
Для прямолинейного отрезка пути с учетом того, что θ  0, а продольный уклон пути для наземных железных дорог не превышает 0,05 (ψ 0=2,8° ), матрица
0, а продольный уклон пути для наземных железных дорог не превышает 0,05 (ψ 0=2,8° ), матрица  может быть представлена в виде
может быть представлена в виде

 в формуле (7) выражается через координаты точек расположения датчиков БК следующим образом
в формуле (7) выражается через координаты точек расположения датчиков БК следующим образом

Для прямолинейного отрезка в силу малости углов колебания вагона относительно ПСК C

Измерительная колесная пара поворачивается вместе с тележкой на скользунах относительно кузова вагона на угол γ T и за счет рессорной подвески на угол θ T с угловыми скоростями  и
и  . Угол γ T поворота тележки вокруг шкворня определяется специальными датчиками поворота, угол θ T поворота оси колесной пары определяется по показаниям датчиков БК
. Угол γ T поворота тележки вокруг шкворня определяется специальными датчиками поворота, угол θ T поворота оси колесной пары определяется по показаниям датчиков БК

где h1 и h2 - расстояния колесных букс до рамы кузова вагона; S - расстояние между точками опоры колес на рельсы.
Скорости изменения координат в ПСК точек крепления датчиков БК к буксам будут

Скорость  перемещения контрольной точки рельса относительно буксы (в качестве контрольной точки рельса обычно принимают точку на внутренней по отношению к колее стороне рельса, расположенную на 14 мм ниже уровня головки рельса) определяется по сигналам датчиков БР, a
перемещения контрольной точки рельса относительно буксы (в качестве контрольной точки рельса обычно принимают точку на внутренней по отношению к колее стороне рельса, расположенную на 14 мм ниже уровня головки рельса) определяется по сигналам датчиков БР, a  для случая цилиндрически обточенных колес измерительной пары. Для конически обточенной колесной пары
для случая цилиндрически обточенных колес измерительной пары. Для конически обточенной колесной пары

где n - коничность обода колеса. Для стандартных колес n=0,05.
В результате суммарные скорости изменения координат контрольных точек рельсов составят

Для определения составляющих VKiX и VKiZ надо представить векторное уравнение (7) в матричном виде

откуда с учетом соотношений (7-9 и 11) получим

Подставляя значения скоростей (17) в выражение (15), получим уравнения скоростей изменения координат горизонтального и вертикального профилей рельсовых нитей.

Независимой переменной в уравнениях (18) является время. Путеизмерительные системы контролируют профиль рельсов как функцию продольной координаты пути. Переход к новой независимой переменной может быть произведен, исходя из очевидной связи времени и продольной координаты Y, устанавливаемой соотношением

Для обеспечения этого перехода необходима высокая точность измерения пройденного пути, которая может быть достигнута применением интегрированной системы навигации на рельсовом пути.
Из формулы (19) следует, что скорости приращения координат контрольных точек рельсов, определяемые выражением (15), могут быть представлены как функция продольной координаты пути Y следующим образом

При малых приращениях пути dYPi

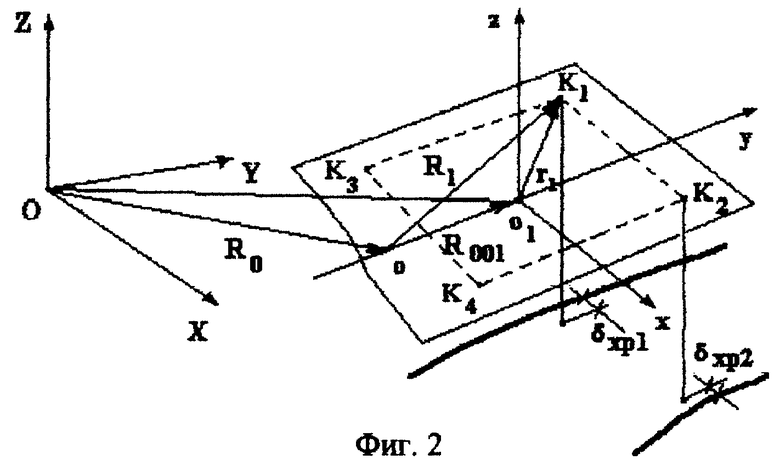
где α и β - углы наклона касательной к рельсу в контрольной точке по отношению к оси ОY пути, в плоскостях XOY и XOZ, соответственно (фиг.3). Эти касательные определяют направление проекций вектора скорости виртуального движения контрольной точки на указанные плоскости.
Неровность можно определять относительно некоторой средней линии заданной протяженности, полученной путем аппроксимации результатов измерений профиля. Тогда под неровностью пути в точке n будем понимать отклонение Нn рельсовой нити от расчетной прямой АВ (фиг.3).
Hn=Xn-Xcn, (22)
где Хn - ордината рельса в контрольной точке, Хсn - ордината средней точки аппроксимирующей линии. D на фиг.3 - длина измерительной базы участка, включающая m результатов измерений. Измерительная линия АВ определяется, например, из условия, что она должна разделить кривую линию рельса X=f(Y) таким образом, чтобы суммарная площадь, ограниченная кривой и лежащая выше расчетной линии, была равна суммарной площади, лежащей ниже нее, т.е. выполнялось условие

где ХCP - текущая ордината аппроксимирующей прямой. Одновременно должны быть равны площади фигуры, образованной кривой X=f(Y) с осью абсцисс, и трапеции  т.е.
т.е.

Система уравнений (23-24) полностью определяет положение измерительной прямой АВ и при наличии базы данных о проектных параметрах пути может быть использована для контроля положения аппроксимирующей линии относительно проектной.
Текущее значение ординаты X(Y) может быть получено в результате интегрирования по продольной координате результатов измерений в соответствии с уравнением

где Х0 - начальная ордината.
Для ординаты Xn в уравнении (22) соответственно получим

Подстановка соотношения (25) в уравнение (24) дает значение ординаты средней точки аппроксимирующей линии АВ

С учетом соотношений (25), (27) и (22) неровность рельсовой нити в плане определяется выражением

Учитывая, что путеизмерительные системы работают с тактовой частотой, задаваемой датчиком пройденного пути, целесообразно представить выражение (28) в дискретной форме

где l - дискретность одометра по продольной координате.
При рассмотрении варианта движения по криволинейному участку пути необходимо дополнительно учитывать действие следующих факторов. В этом режиме ПСК повернута вокруг оси OY на угол наклона пути, проектное значение которого обозначим как θ 0. Это значение определяется радиусом кривой R и средней скоростью движения поездов на данном участке. На железной дороге максимальное возвышение наружного рельса криволинейного участка пути не превышает 150 мм, что соответствует углу наклона пути θ 0≈5,7° . Тележка при движении по криволинейному участку дополнительно разворачивается относительно кузова вагона на угол

где lв - продольная база вагона. Учитывая, что lв≈10 м, а R составляет не менее 300 м, величина угла δ Кт не превышает 1° и его можно считать малым при выполнении расчетов. Учитывая малость углов ψ 0 и θ 0, матрицу перехода  в выражении (8) можно записать как
в выражении (8) можно записать как

Производя вычисления, аналогичные тем, что и при выводе соотношений (18), для скоростей перемещения точек горизонтального и вертикального профилей рельсовых нитей получим
Таким образом, измерение неровностей рельсовых нитей по-прежнему рассматривается в неподвижной ПСК, в которой программное движение происходит по круговой траектории с проектными параметрами. Аппроксимация результатов измерений окружностью радиуса R проводится по методике, приведенной выше для случая движения по прямолинейному участку. Режим движения по переходной кривой будет отличаться программным изменением текущей величины угла θ от нуля до значения θ 0.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ НЕРОВНОСТЕЙ (РИХТОВКИ) И КРИВИЗНЫ В ПЛАНЕ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2276216C2 |
| СПОСОБ КОРРЕКЦИИ АНАЛИТИЧЕСКИХ ГИРОВЕРТИКАЛЕЙ УСЕЧЕННОГО СОСТАВА | 2002 |
|
RU2253091C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕИЗМЕРИТЕЛЬНЫМ ВАГОНОМ ЖЕСТКОСТИ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2240244C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСАДКИ РЕЛЬСОВЫХ НИТЕЙ | 2003 |
|
RU2242554C2 |
| СПОСОБ КОРРЕКЦИИ ДАТЧИКА ПРОЙДЕННОЙ ДИСТАНЦИИ | 2003 |
|
RU2243505C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕИЗМЕРИТЕЛЬНЫМ ВАГОНОМ БОКОВЫХ (ПОПЕРЕЧНЫХ) ЖЕСТКОСТЕЙ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2291804C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕИЗМЕРИТЕЛЬНЫМ ВАГОНОМ ВЕРТИКАЛЬНЫХ ЖЕСТКОСТЕЙ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2291803C2 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2394120C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
Изобретение относится к технике измерений геометрических параметров рельсового пути. Согласно предложенному способу формируют вектор виртуальной скорости каждой из рельсовых нитей в проектной системе координат. Используя сигналы с датчика пути, переходят от независимой переменной во времени к независимой переменной по продольной координате пути. Интегрированием найденных скоростей получают вертикальные и горизонтальные профили рельсовых нитей. Искомые неровности рельсовых нитей определяют как разность между полученными профилями и их аппроксимирующими кривыми, полученными в результате обработки результатов измерений, и/или паспортными профилями. В данном способе передаточная характеристика не зависит от длины неровностей, что исключает искажение измерительной информации. 3 ил.
Способ инерциального измерения неровностей рельсового пути, заключающийся в том, что при помощи инерциальной навигационной системы, установленной над шкворнем измерительной тележки путеизмерительного вагона, измеряют углы ориентации и вектор скорости кузова вагона, при помощи датчиков букса-кузов - скорости движения букс относительно кузова, при помощи датчиков угловых перемещений - скорость вращения измерительной тележки вокруг шкворня, а при помощи датчиков букса-рельс - скорости перемещения букс относительно рельсов, отличающийся тем, что по полученной информации формируют вектор виртуальной скорости каждой из рельсовых нитей в проектной системе координат, далее, используя сигналы с датчика пути, переходят от независимой переменной во времени к независимой переменной по продольной координате пути, интегрированием найденных скоростей получают вертикальные и горизонтальные профили рельсовых нитей, а неровности рельсовых нитей определяют как разность между полученными профилями и их аппроксимирующими кривыми, полученными в результате обработки результатов измерений, и/или паспортными профилями.
| ЗЕНЗИНОВ Б.Н | |||
| и др | |||
| Вагон - путеизмеритель нового поколения// Железнодорожный транспорт, 1998, №11, с.17-21 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 1996 |
|
RU2112678C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ НА ПОВЕРХНОСТИ КАТАНИЯ РЕЛЬСА | 1992 |
|
RU2035534C1 |
| SU 1542989 Al, 15.02.1990. | |||

