Изобретение относится к области морского навигационного приборостроения.
Известны судовые интегрированные навигационные комплексы, включающие в свой состав ряд приборов, вырабатывающих курс, углы качки и динамические параметры движения корабля. Так, в [1] рассмотрена система автоматического управления движения (САУД) "Бриз", в которой интегрированный комплекс использует данные гирокомпаса (ГК) "Вега", гировертикали (ГВ), гироскопического датчика угловой скорости (ДУС) и измерителя линейных ускорений.
Основным недостатком такого построения интегрированного комплекса является низкая надежность из-за значительного количества измерителей, интерфейсных блоков и связей между гироскопическими датчиками, входящими в состав рассматриваемой схемы.
Известны также интегрированные комплексы, реализованные на базе бескарданных инерциальных навигационных систем (БИНС) и приемной аппаратуры спутниковой навигационной системы (СНС) [2, 3].
К основным недостаткам таких схем построения интегрированных комплексов следует отнести их высокую стоимость. Это обусловлено высокими требованиями к точности чувствительных элементов и, в основном, к точности используемых гироскопов, так как для обеспечения измерения угловой скорости вращения горизонтного трехгранника, обусловленной суточным вращением Земли и линейной скоростью перемещения центра масс судна, и придания БИНС гирокомпасных свойств необходима точность гироскопов порядка 0,1...0,01 град./ч. Вследствие этого на морских судах интегрированные комплексы на базе БИНС до настоящего времени не применяются.
Известен также интегрированный навигационно-управляющий комплекс для морских судов [4, 5], состоящий из бескарданного инерциального измерительного модуля (БИИМ) и штатных навигационных средств: лага и гироскопического компаса (ГК), либо ГК и бортовой аппаратуры спутниковой навигационной системы (СНС).
Укрупненная блок-схема такого комплекса на базе аппаратуры СНС приведена на фиг. 1.
Рассматриваемый здесь БИИМ 1, как динамическая приставка к приемной аппаратуре СНС, представляет собой малогабаритный, высоконадежный и сравнительно дешевый бескарданный модуль, так как включает в себя блок "грубых" гироскопических датчиков (БГД) 2 [либо блок датчиков угловых ускорений (БДУУ) либо блок датчиков угловых скоростей (ДУС), которые позволяют определять угловую скорость с точностью на уровне 1 - 10 град./ч], блок акселерометров (БА) 3 и вычислительное устройство (ВУ) 4.
Функционирование интегрированной системы осуществляется следующим образом. Выходными данными БГД 2 являются проекции угловой скорости объекта параметров ориентации (БВПО) 5 с учетом поправок вырабатываются текущие значения параметров ориентации 6 (курс, углы килевой и бортовой качек, а также скорости их изменений). Данные БА 3 после их преобразования в блоке преобразования приращений кажущейся скорости (БППКС) 7 из осей связанного трехгранника в географические и компенсации "вредных" ускорений интегрируются в блоке выработки параметров поступательного движения (БВППД) 8 с целью получения параметров поступательного движения судна 9 (координат места и составляющих вектора линейной скорости объекта на оси горизонтной системы координат с географической ориентацией осей).
Для совместной обработки информации БИИМ 1, ГК 10 и данных приемной аппаратуры (ПА) СНС 11 с целью выработки поправок в блоке комплексной обработки информации (БКОИ) 12 используется стандартная процедура оптимального линейного фильтра Калмана (ОФК). При этом для повышения точности системы в блоке поправок данных СНС (БПД СНС) 13 осуществляется пересчет данных СНС 11, привязанных к фазовому центру антенны (А) 14 приемной аппаратуры, к месту установки блока чувствительных элементов (БЧЭ) 15.
Недостатком известного устройства [4, 5], которое выбрано в качестве прототипа, является необходимость использования в составе интегрированного комплекса для навигации и управления гироскопического прибора с кардановым подвесом - ГК, что существенно снижает надежностные характеристики комплекса в целом, увеличивает его массогабаритные характеристики и стоимость.
Целью изобретения является повышение точности и надежности выработки курса, а также снижение массогабаритных характеристик и стоимости в целом интегрированного комплекса для навигации и управления движением морских судов за счет исключения из его состава комплекса гирокомпаса.
Поставленная цель достигается тем, что БЧЭ и приемная антенна СНС устанавливаются на удалении не менее 5 - 10 м от ц.м. судна, что приводит к модуляции погрешностей "грубых" гироскопов в условиях рыскания судна. Для реализации положительного эффекта, обусловленного отстоянием БЧЭ от ц.м. судна, в устройство дополнительно введен блок пересчета данных интегрированного комплекса (БПДИК) от места установки БЧЭ к центру масс (ц.м.) судна, первый вход которого подключен к выходу БВППД, второй вход соединен с выходом БВПО и дополнительно выход БППКС соединен с третьим входом БКОИ.
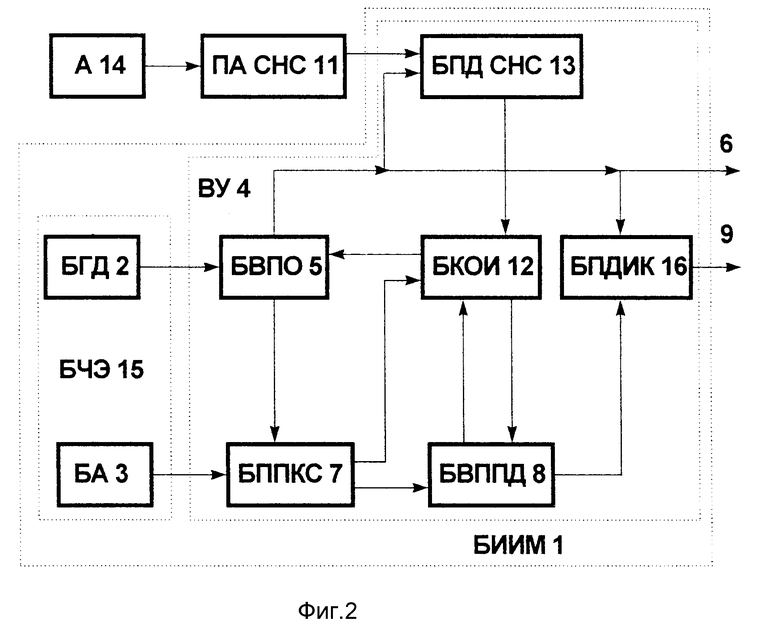
На фиг. 2 изображена структурная схема предлагаемого интегрированного комплекса для навигации и управления движением судов.
Интегрированный комплекс для навигации и управления движением судов включает БИИМ 1, который содержит БЧЭ 15, состоящий из БГД 2 и БА 3, ВУ 4, которое, в свою очередь, содержит БВПО 5, БППКС 7, БВППД 8, БКОИ 12, БПД СНС 13 и БПДИК 16, и А 14 ПА СНС 11. Отметим, что алгоритмы, реализуемые в блоке пересчета данных интегрированного комплекса от места установки БЧЭ к ц.м. судна, аналогичны алгоритмам, реализуемым в блоке поправок данных СНС прототипа. Выходными данными интегрированного комплекса для навигации и управления движением судов являются параметры ориентации 6 (курс, углы килевой и бортовой качек, а также скорости их изменений) и параметры поступательного движения судна 9 (координаты места и составляющие вектора линейной скорости объекта на оси горизонтной системы координат с географической ориентацией осей).
Основное отличие предлагаемого устройства от прототипа, помимо исключения из его состава ГК и соответствующей связи по курсу от БВПО 5 к БКОИ 12, заключается в размещении БЧЭ 15 БИИМ 1 и приемной антенны А 14 ПА СНС 11 на максимально возможном удалении от ц.м. судна, а также во введении новой связи выхода БППКС 7 с входом БКОИ 12 что, с одной стороны, отличается от общепринятого размещения на морских судах гирокомпасов (ГК стремятся устанавливать вблизи ц.м. судна [6]), а, с другой, позволяет придать БИИМ избирательность по курсу. Такое требование к размещению БЧЭ ИИМ может быть объяснено следующим образом.
Одной из проблем на пути создания интегрированных комплексов с достаточно "грубыми" ЧЭ является задача выполнения требований по точности выработки курса для обеспечения навигационной безопасности судовождения. Действительно, привлечение данных ПА СНС о горизонтальных составляющих линейной скорости судна и прямое использование в БИИМ гирокомпасного эффекта в силу значительных дрейфов используемых гироскопов не представляется возможным, так как в этом случае равновесное положение ошибок выработки курса, определяемое отношением постоянной составляющей "восточного" дрейфа гироскопов БИИМ к угловой скорости вращения Земли (для неподвижного основания), может составлять 100 град. и более.
Решение поставленной задачи за счет создания для подвижных объектов ПА СНС с фазовыми интерферометрическими измерениями, обеспечивающей выработку поправки курса [7] , ведет к усложнению ПА СНС, значительному повышению ее стоимости и, кроме того, в этом случае имеет место потеря информационной автономности ИСОН по курсу.
Модуляционные повороты БЧЭ в плоскости палубы, в принципе, придают БИИМ избирательность по курсу с приемлемой точностью, однако приводят к усложнению аппаратуры и, как следствие, к увеличению массогабаритных характеристик и стоимости. При этом длительность переходного процесса, определяемая временем оценки постоянных составляющих дрейфов гироскопов БИИМ, достаточно значительна и может составлять 1,5 - 2,0 ч при уровне постоянных составляющих дрейфов 10-2 град./с.
Аналогичный эффект с уменьшением времени переходного процесса может быть достигнут при установке БЧЭ БИИМ на значительном удалении от ц.м. судна. В этом случае угловые колебания судна по углу рыскания, с одной стороны, подобны модуляционным поворотам БЧЭ БИИМ, а, с другой, позволяют непосредственно наблюдать в погрешностях выработки линейной скорости БИИМ составляющие, обусловленные неточным знанием курса. Действительно, дифференциальные уравнения, описывающие погрешности автономного БИИМ в выработки восточной ΔVE и северной ΔVN составляющих линейной скорости, имеют вид [5]: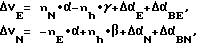
где
α,β,γ - ошибки БИИМ в моделировании горизонтной системы координат ENh с географической ориентацией осей;
ΔαE,,ΔαN - проекции инструментальных погрешностей акселерометров на оси горизонтной системы координат.
ΔaBE,ΔaBN - погрешности компенсации "вредных" ускорений по соответствующим осям;
nE, nN, nh - проекции вектора кажущегося ускорения места установки БИИМ на оси горизонтной системы координат.
Подчеркнем, что в случае установки БИИМ при максимально возможном удалении от ц. м. судна горизонтальные составляющие nE, nN определяются, в основном, переносным ускорением, обусловленным рысканием, имеют периодический характер и могут быть непосредственно измерены БА.
Для подтверждения работоспособности предлагаемого устройства осуществлялось численное моделирование его погрешностей. При численном моделировании данной задачи на ПЭВМ использовались измерения Zi(i = VE, VN, Vh) фильтра Калмана: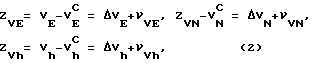
где
νVE,νVN,νVh - соответствующие погрешности СНС в выработке линейной скорости, аппроксимируемые процессами типа "белый" шум с l σ = 0,1 м/с на частоте 1 Гц [8].
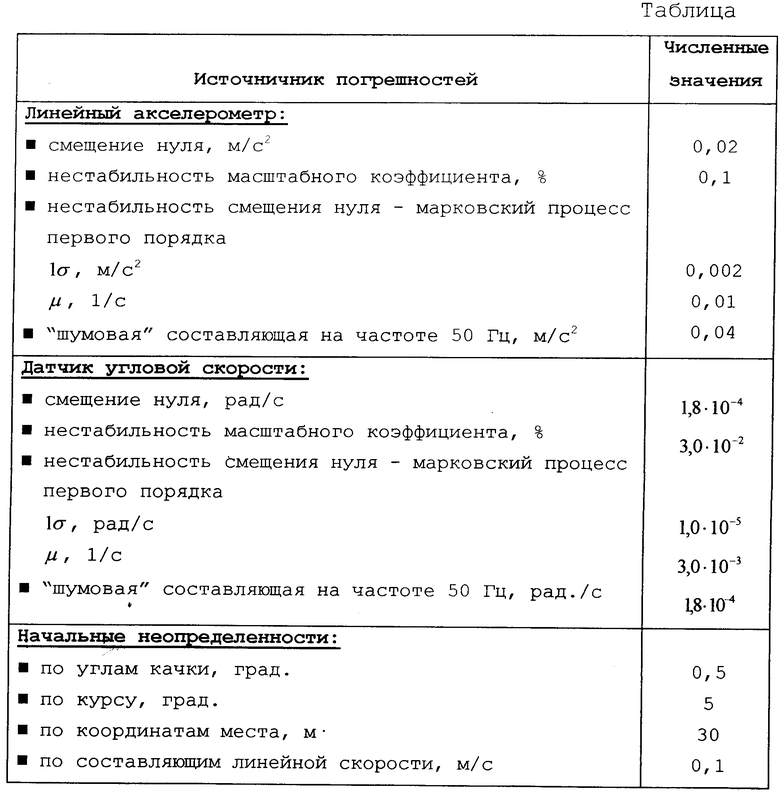
Для формирования измерений (2) использовалась имитационная модель погрешностей интегрированного комплекса 21 порядка. Численные значения (l σ ) инструментальных погрешностей ЧЭ и начальные неопределенности выходных данных БИИМ приведены в таблице.
Расчетная модель погрешностей ИСОН была представлена в векторно-матричной форме:
В соответствии с уравнениями погрешностей ИСОН на ДУС вектор состояния имеет вид [5]:
где
Δωx,Δωy,Δωz - проекции постоянных составляющих дрейфа БГД (ДУС) на оси, связанной с корпусом объекта системы координат xyz;
Δax,Δay,Δaz - аналогичные проекции постоянных составляющих погрешностей линейных акселерометров.
Отстояние характеризовалось следующими значениями: по поперечной оси - 2 м, по продольной - 20 м, а по вертикальной - 5 м. Параметры "малой" и "большой" качек при моделировании принимались следующими:
"малая" качка и рыскание:
рыскание - ϕr= 1,5°,Tϕ= 25 c;
килевая качка - ψ = 1,5°,Tψ= 10 c;
бортовая качка - θk= 2,0°,Tϕ= 15 c
"большая" качка и рыскание:
рыскание - ϕr= 3,0°,Tϕ= 20 c;
килевая качка - ψ = 2,5°,Tψ= 5 c;
бортовая качка θk= 12,0°,Tϕ= 9 c.
Результаты численного моделироваия погрешностей интегрированного комплекса по курсу представлены на фиг. 3, из которых следует, что при наличие рыскания интегрированный комплекс обладает гирокомпасным эффектом.
Литература
1. Злобин Г.П., Смигельский С.П. Суда на подводных крыльях и воздушной подушке. Л.: Судостроение, 1976.
2. Плотников П. К. и др. Алгоритмы работы и свойства комплексных бесплатформенных систем ориентации и навигации двойного применения // Реферат доклада на III Санкт-Петербургской международной конференции по интегрированным навигационным системам//Гироскопия и навигация. 1996, - N 3, с. 115.
3. Чесноков Г.И. и др. Интегрированная навигационная система для подвижных наземных объектов//Реферат доклада на III Санкт-Петербургской международной конференции по интегрированным навигационным системам//Гироскопия и навигация.-1996.-N3.-с.117.
4. Патент РФ N 2056037. Гироазимутгоризонткомпас/Емельянцев Г.И., Анучин О.Н., Биндер Я.И., Гусинский В.З., Ходорковский Я.И., 1992.
5. Анучин О.Н. и др. Инерциальный измерительный модуль интегрированного навигационного комплекса для морских судов//Гироскопия и навигация. 1994, N 1, с. 32 - 44.
6. Регистр СССР. Правила по конвенционному оборудованию морских судов. - М.: Транспорт, 1990.
7. Резниченко В.И., Шашков А.А. Фазовый метод определения ориентации по сигналам спутниковой навигационной системы//Навигация и гидрография, 1996, N 2, с. 56 - 60
8. Зайцев А.В., Резниченко В.И. Особенности функционирования спутниковой навигационной аппаратуры на морском объекте//Навигация и гидрография. 1995, N 1, с. 56 - 60.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| СТАТОДИНАМИЧЕСКИЙ КРЕНОМЕТР | 1992 |
|
RU2057679C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| ИЗМЕРИТЕЛЬ ФАКТИЧЕСКОЙ ОСТОЙЧИВОСТИ СУДНА | 1992 |
|
RU2057680C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2015 |
|
RU2633703C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |

Интегрированный комплекс используется для морской навигации. Для повышения точности и надежности выработки курса, а также снижения массогабаритных характеристик интегрированный комплекс доля навигации и управления движением морских судов содержит бескарданный инерциальный измерительный модуль и приемную аппаратуру спутниковой навигационной системы (СНС). Блок чувствительных элементов БИИМ и приемной антенны СНС размещены на максимально возможном удалении от центра масс судна, что позволяет придать БИИМ избирательность по курсу. БИИМ содержит блок чувствительных элементов с линейными акселерометрами и гироскопами, блок выработки параметров поступательного движения, блок выработки параметров ориентации, блок преобразований кажущейся скорости и блок комплексной обработки информации. 3 ил.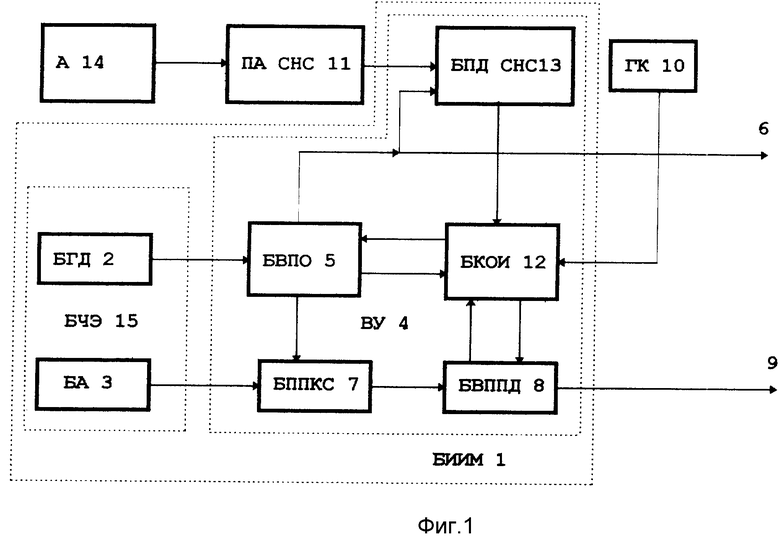
Интегрированный комплекс для навигации и управления движением морских судов, содержащий бортовую аппаратуру спутниковой навигационной системы с приемной антенной и бескарданный инерциальный измерительный модуль, включающий блок чувствительных элементов с линейными акселерометрами и гироскопами, блок выработки параметров поступательного движения, блок выработки параметров ориентации, блок преобразования приращений кажущейся скорости и блок комплексной обработки информации, отличающийся тем, что в его состав дополнительно введен блок пересчета данных интегрированного комплекса к центру масс судна, первый вход которого подключен к выходу блока выработки параметров поступательного движения, второй вход соединен с выходом блока выработки параметров ориентации, блок преобразования приращений кажущейся скорости соединен с блоком комплексной обработки информации, при этом блок чувствительных элементов и приемная антенна спутниковой навигационной системы установлены на удалении не менее 5 - 10 м от центра масс судна.
| Анучин О.Н | |||
| и др | |||
| Гироскопия и навигация, 1994, N 1(4), с.32-44. |
