Изобретение относится к области измерительной техники, конкретно к той ее части, которая занимается вопросами азимутального ориентирования подвижных объектов, имеющих в системах управления гиростабилизаторы.
Из литературы известно [1], что самоориентирование в азимуте трехосного гиростабилизатора или его гирокомпасирование как процесс, может быть реализован при помощи элементов самого гиростабилизатора - акселерометров, гироскопов или командных датчиков угла различными способами и техническими средствами.
Наиболее близким по технической сущности к заявляемому изобретению следует считать самоориентирующийся в азимуте трехосный гиростабилизатор [2], содержащий три гироскопа и два акселерометра, оси чувствительности которых горизонтальны, установлены на стабилизируемой платформе и вместе с усилителями стабилизации, коррекции и стабилизирующими двигателями образуют системы стабилизации и коррекции, относительно двух горизонтальных осей, а для ориентирования в азимуте выход акселерометра через третий усилитель коррекции подключен к датчику момента вертикального гироскопа, датчика угла которого через усилитель стабилизации связан со стабилизирующим двигателем вертикальной оси платформы.
Недостатком известного устройства следует считать сравнительно низкое быстродействие, поэтому приведение платформы к направлению меридиана занимает достаточно много времени. Это происходит потому, что сигнал, подаваемый от акселерометра на датчик момента вертикального гироскопа, пропорционален углу отклонения платформы от плоскости горизонта. При движении платформы к направлению меридиана величина этого угла уменьшается, уменьшается и сигнал на датчике момента вертикального гироскопа. Усиление сигнала в усилителе приводит к колебательной границе устойчивости и нарушению апериодического компасного движения.
Этот недостаток может быть устранен, а быстродействие увеличено, если повысить чувствительность акселерометра, что позволит в сигнале от акселерометра выделить составляющие, пропорциональные указанному углу, угловой скорости и угловому ускорению компасного движения платформы.
Целью настоящего изобретения является сокращение временных затрат при определении направления меридиана трехосным гиростабилизатором.
Эта цель достигается тем, что дополнительно введены блок повышения чувствительности акселерометра и измерительный блок, причем, первый из них содержит: компаратор, электронный ключ и источник тока, электрически связанные друг с другом; вход компаратора подключен к выходу акселерометра, а источник тока через ключ подключается к датчику момента акселерометра; в состав измерительного блока входят: второй электронный ключ, генератор импульсов, три реверсивных счетчика, цифроаналоговый преобразователь и суммирующий усилитель, при этом, второй электронный ключ подключен управляющим входом к выходу компаратора и соединяет выход генератора импульсов и вход первого реверсивного счетчика, выход которого и выходы двух других счетчиков, включенных последовательно первому через цифроаналоговый преобразователь, подключаются на входы суммирующего усилителя, выход которого подключен к датчику момента вертикального гироскопа.
Сущность предлагаемого самоориентирующегося в азимуте трехосного гиростабилизатора может быть показана при помощи принципиальной схемы, которая представлена на фиг. 1, где показаны: два горизонтальных гироскопа Г2, Г3, один вертикальный гироскоп Г1 и два горизонтальных акселерометра А2, А3, установленные на платформе 1, заключенной при помощи рамок 2 и 3 в карданов подвес с тремя степенями свободы, а вместе с усилителями стабилизации УСС2, УСС3, УСС1, усилителями коррекции К2, К3, К1 и стабилизирующими двигателями СД2, СД3, СД1 образуют системы стабилизации и коррекции, относительно двух горизонтальных и одной вертикальной осей платформы. На фиг. 1 показаны угловые рассогласования α1, α2, α3, соответствующие произвольному положению платформы, и система координат OXnYnZn, связанная с платформой, не совпадает с системой координат ONLξ, оси которой ориентированы по сторонам света, ось ON направлена на север, ось OL направлена по вертикали места, а ось Oξ направлена на восток. Тогда плоскость NOξ является плоскостью горизонта, а NOL - плоскостью меридиана. Эта СК имеет проекции угловой скорости ω3 суточного вращения Земли: ωN = ω3cosφ - горизонтальную и ωL = ω3sinφ - вертикальную.
Взаимное положение СК определяется углами и угловыми скоростями поворота платформы, которые имеют место при произвольном состоянии платформы. Указанные углы могут иметь различные значения, поэтому перед гирокомпасированием гиростабилизатора необходимо провести платформу в исходное положение, которое характеризуется тем, что оси чувствительности горизонтальных гироскопов Г2 и Г3 вместе с платформой горизонтируются при помощи следящих систем. Для этого используют сигналы от акселерометров А2, А3 через усилители коррекции К2, К3, датчики моментов ДМ2 и ДМ3. Далее сигналы датчиков угла ДУ2, ДУ3 гироскопов Г2, Г3 через усилители УСС2, УСС3 поступают на стабилизирующие двигателями СД, СД, которые поворачивают платформу вместе с гироскопами и акселерометрами к установившимся значениям углов α2 = α2y, α3 = α3y.
Вертикальный гироскоп при этом вертикализируется, а его ось чувствительности удерживается в вертикальном положении при помощи следящей системы в составе: датчика угла  усилителя коррекции К1 и далее, как показано на фиг. 1, по цепочке ДМ1, ДУ1, УСС1 и СД1.
усилителя коррекции К1 и далее, как показано на фиг. 1, по цепочке ДМ1, ДУ1, УСС1 и СД1.
При включении ключа Кл в верхнее положение платформа переходит в режим гирокомпаса. При этом, акселерометр А2 при помощи блока повышения чувствительности в составе: компаратора 4, электронного ключа 5 и источника тока 6, переводится в режим автоколебаний, за счет того, что вход компаратора 4 подключен к выходу акселерометра, а источник тока 6 через ключ 5 подключается к датчику момента акселерометра. Наличие в цепи акселерометра нелинейного звена, каковым является компаратор, приводит к автоколебательному режиму движения чувствительного элемента акселерометра [3].
Известные акселерометры, работающие в автоколебательном режиме, осуществляют широтно-импульсную модуляцию измеряемого параметра и обладают повышенной чувствительностью [4], что позволяет использовать из для измерения параметров компасного движения гиростабилизатора при помощи дополнительного измерительного блока,
который содержит: второй электронный ключ 7, генератор импульсов 8, три реверсивных счетчика 9, 10, 11, цифроаналоговый преобразователь 12 и суммирующий усилитель 13. Через ключ 7, управляющий вход которого связан с выходом компаратора 4, выход генератора 8 подключается на разностный вход первого реверсивного счетчика 9, выход которого, как и выходы второго 10 и третьего 11 реверсивных
счетчиков, включенных последовательно первому, подключаются через цифроаналоговый преобразователь 13 на входы суммирующего усилителя 13, выход которого включен на датчик момента ДМ1 вертикального гироскопа Г1.
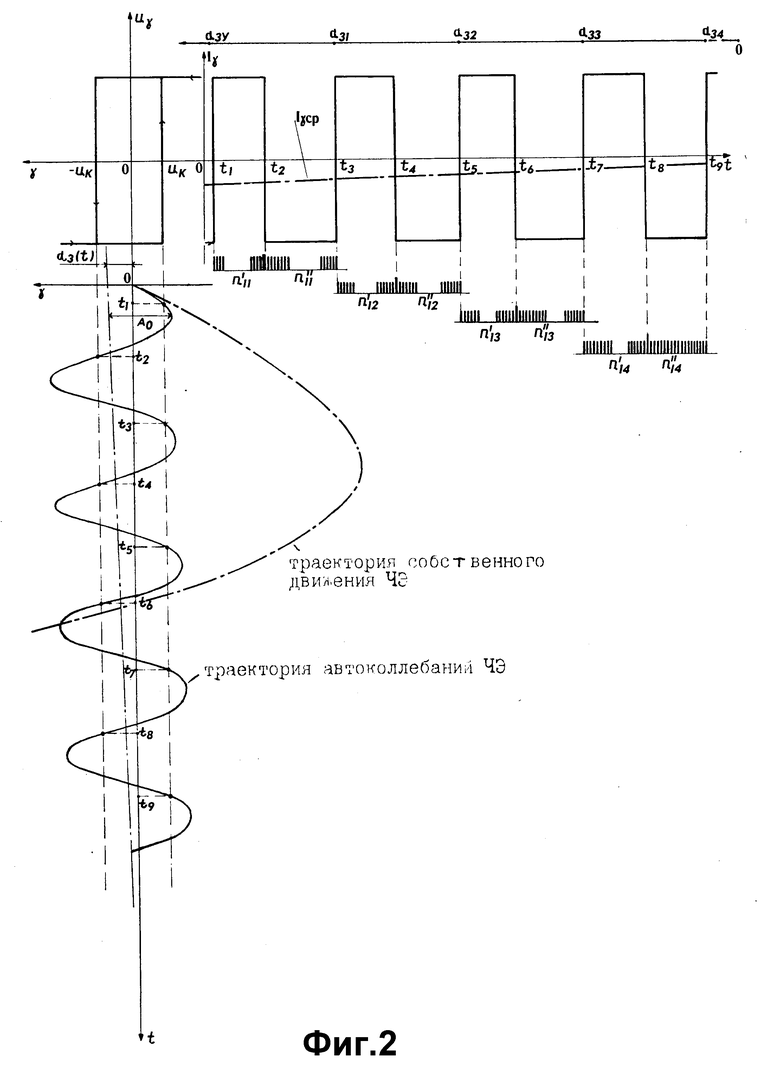
Принцип измерения параметров компасного движения платформы поясняется графиками, изображенными на фиг. 2, при помощи которых удалось совместить пространственно-временное движение чувствительного элемента акселерометра γ(t), Iγ(t) и платформы α3(t), причем, последнее привязано к автоколебательному движению ЧЭ и измерительному каналу, формирующему счетные импульсы.
При компасном движении платформы, t=t1, угол α3 будет уменьшаться от значения α3y и за период T0 автоколебаний он уменьшится до значения α31. Тогда, по аналогии с известным соотношением [3], имеем
где число импульсов на выходе первого реверсивного счетчика 9, пропорциональное углу α3y-α31, на который отклонилась платформа за период автоколебаний T0;
число импульсов на выходе первого реверсивного счетчика 9, пропорциональное углу α3y-α31, на который отклонилась платформа за период автоколебаний T0;  числа импульсов за первый и второй полупериоды первого периода автоколебаний, ml и
числа импульсов за первый и второй полупериоды первого периода автоколебаний, ml и
Кдм - маятниковый момент и коэффициент датчика момента акселерометра; fт и Кf - частота счетных импульсов от генератора 8 и коэффициент передачи; Iср - среднее значение тока в датчике момента за период T0; g - ускорение силы тяжести, - коэффициент передачи акселерометра, устанавливающий связь между числом импульсов и углом отклонения платформы (проекцией ускорения силы тяжести на ось чувствительности акселерометра).
- коэффициент передачи акселерометра, устанавливающий связь между числом импульсов и углом отклонения платформы (проекцией ускорения силы тяжести на ось чувствительности акселерометра).
За каждый следующий период автоколебаний на выходе первого счетчика 9 аналогично будет получено: Δn12, Δn13, Δn14 и т.д., пропорциональных отклонению платформы на углы: α31-α32, α32-α33, α33-α34, т.е. за четыре периода T0 измерений платформа отклонится на угол α3y-α34, который будет измерен последовательно и в каждом периоде:
Во втором счетчике 10 происходит сложение результатов счетчика 9 последовательно по парам, что будет соответствовать изменению угла α3 за время 2T0, т. е. информация на выходе счетчика 10 будет пропорциональна угловой скорости  но на измеренных участках:
но на измеренных участках:
Изменение угловой скорости в единицу времени будет соответствовать величине углового ускорения. Если вычитать результаты второго счетчика 10 в третьем счетчике 11, то на выходе его получим информацию об угловом ускорении, т.к. выражения (3) отличаются по времени формирования на величину периода T0. Тогда на выходе третьего счетчика будем иметь:
Полученные электрические сигналы в виде импульсов на выходах счетчиков 9, 10, 11, величины которых отражают компасное движение платформы, т.к. измерение их начинается при включении компасного режима, а сами величины соответствуют, приращению угла α3, угловой скорости  и угловому ускорению
и угловому ускорению  платформы, что следует из выражений (2), (3) и (4), не могут быть использованы для формирования момента коррекции. Поэтому необходимы цифроаналоговый преобразователь 12 и суммирующий усилитель 13, например магнитный усилитель, которые позволят сформировать на датчике момента вертикального гироскопа момент коррекции в виде
платформы, что следует из выражений (2), (3) и (4), не могут быть использованы для формирования момента коррекции. Поэтому необходимы цифроаналоговый преобразователь 12 и суммирующий усилитель 13, например магнитный усилитель, которые позволят сформировать на датчике момента вертикального гироскопа момент коррекции в виде
где
К11, К12, К13 - соответствующие коэффициенты момента коррекции.
Математическое моделирование уравнений компасного режима, аналогичных уравнениям на стр. 598 [2], но с учетом равенства (5), показало, что введение измеренных первой и второй производных угла α3 в закон коррекции вертикального гироскопа способствует повышению быстродействия режима гирокомпасирования ТГС.
При моделировании удалось выбрать оптимальное соотношение коэффициентов момента коррекции, которое позволило осуществить приведение платформы в направление меридиана от начального отклонения, равного α1y = 90o, с погрешностью Δα1 = 10 угл. мин за время tпр = 20 сек. Известные устройства /2/ на выполнение аналогичной операции требуют не менее 980 с времени, что также было получено на модели известного устройства при прочих равных условиях, в том числе при ограничениях по току датчика момента.
Источники информации
1. Назаров Б.И. и др. Командно-измерительные приборы. -МО СССР, 1987, с. 588.
2. Там же, с.592-605.
3. Скалон А. И. Обобщенный анализ характеристик прецизионных датчиков механических величин, работающих в режиме автоколебаний. Измеренная техника, N 3, 1990, с. 7-8.
4. Скалон А. И. и др. Оптимизация структуры датчиков для динамических измерений. - Метрология. N 2, 1987, с. 20-26.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1995 |
|
RU2131585C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 2010 |
|
RU2428658C1 |
| Способ определения азимута трёхосного гиростабилизатора по углу поворота гироскопа | 2020 |
|
RU2729515C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ АЗИМУТА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ | 2014 |
|
RU2552608C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПОВОРОТА КОРПУСА ГИРОБЛОКА | 2012 |
|
RU2513631C1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334198C1 |
| Способ определения азимута платформы трёхосного гиростабилизатора по отклонению угла поворота гироскопа от расчётного значения | 2016 |
|
RU2649063C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПРЕЦЕССИИ ГИРОБЛОКА | 2006 |
|
RU2324897C1 |
Гиростабилизатор предназначен для азимутального ориентирования подвижных объектов. Три гироскопа и два акселерометра, оси чувствительности которых горизонтальны, установлены на стабилизируемой платформе и вместе с усилителями стабилизации, коррекции и стабилизирующими двигателями образуют системы стабилизации и коррекции относительно двух горизонтальных осей. Для ориентирования в азимуте дополнительно введены блок повышения чувствительности акселерометра и измерительный блок. Первый блок содержит компаратор, электронный ключ и источник тока, электрически связанные друг с другом. Вход компаратора подключен к выходу акселерометра, а источник тока через ключ подключается к датчику момента акселерометра. В состав измерительного блока входят второй электроный ключ, генератор импульсов, три реверсивных счетчика, цифроаналоговый преобразователь и суммирующий усилитель. Второй электронный ключ подключен управляющим входом к выходу компаратора и соединяет выход генератора импульсов и вход первого реверсивного счетчика, выход которого и двух других счетчиков, включенных последовательно первому, через цифроаналоговый преобразователь подключаются на входы суммирующего усилителя, выход которого подключен к датчику момента вертикального гироскопа. Сокращаются временные затраты при определении направления меридиана. 2 ил.
Самоориентирующийся в азимуте трехосный гиростабилизатор, содержащий три гироскопа и два акселерометра, оси чувствительности которых горизонтальны, установленные на стабилизируемой платформе и вместе с усилителями стабилизации, коррекции и стабилизирующими двигателями образующие системы стабилизации и коррекции относительно двух горизонтальных осей, а для ориентирования в азимуте выход акселерометра через третий усилитель коррекции подключен к датчику момента вертикального гироскопа, датчик угла которого через усилитель стабилизации связан со стабилизирующим двигателем вертикальной оси платформы, отличающийся тем, что дополнительно введены блок повышения чувствительности акселерометра и измерительный блок, причем первый из них содержит компаратор, электронный ключ и источник тока, электрически связанные друг с другом, вход компаратора подключен к выходу акселерометра, а источник тока через ключ подключается к датчику момента акселерометра, в состав измерительного блока входят второй электронный ключ, генератор импульсов, три реверсивных счетчика, цифроаналоговый преобразователь и суммирующий усилитель, при этом второй электронный ключ подключен управляющим входом к выходу компаратора и соединяет выход генератора импульсов и вход первого реверсивного счетчика, выход которого и двух других счетчиков, включенных последовательно первому, через цифроаналоговый преобразователь подключается на входы суммирующего усилителя, выход которого подключен к датчику момента вертикального гироскопа.
| Назаров Б.И | |||
| и др | |||
| Командно-измерительные приборы | |||
| - МО СССР, 1987, с.592-605 | |||
| US 4472978 A, 25.09.84 | |||
| ПОДВЕСНОЙ СВОД МАРТЕНОВСКОЙ ПЕЧИ | 0 |
|
SU368457A1 |
| СТАБИЛИЗИРОВАННАЯ В ПЛОСКОСТИ ГОРИЗОНТА ГИРОПЛАТФОРМА | 1993 |
|
RU2047093C1 |
