Изобретение относится к области измерительной техники, конкретно к той ее части, которая занимается вопросами азимутального ориентирования подвижных объектов, имеющих в системах управления гиростабилизаторы.
Из литературы известно [1], что режим гирокомпаса трехосновного гиростабилизатора или его гирокомпасирование как процесс может быть реализован при помощи элементов самого гиростабилизатора: акселерометров, гироскопов или командных датчиков угла различными способами.
Наиболее близким по технической сущности к заявляемому изобретению следует считать способ гирокомпасирования трехосного гиростабилизатора [2], заключающийся в том, что в исходном положении при помощи двух горизонтальных акселерометров оси чувствительности двух горизонтальных гироскопов горизонтируют вместе с платформой, на которой они установлены, а ось чувствительности вертикального гироскопа вертикализуют, затем включают режим гирокомпаса, пропорционального углу отклонения платформы от плоскости горизонта, измеренного, например, при помощи акселерометра.
Недостатком этого способа, как и других способов, реализованных в трехстепенных гирокомпасах, следует считать низкое быстродействие, поэтому режим гирокомпасирования занимает достаточно много времени.
Целью настоящего изобретения является сокращение временных затрат при определении направления меридиана трехосным гиростабилизатором без потери точности.
Эта цель достигается тем, что дополнительно измеряют первую производную угла отклонения платформы от плоскости горизонта и формируют дополнительный момент коррекции, пропорциональный этой производной.
Сущность предлагаемого способа гирокомпасирования трехосного гиростабилизатора может быть показана при помощи принципиальной схемы, которая представлена на чертеже.
В состав ТГС для гирокомпасирования входят: два горизонтальных гироскопа Г2, Г3, один вертикальный гироскоп Г1 и два горизонтальных акселерометра А2, А3, установленных на платформе 1, заключенной при помощи рамок 2 и 3 в карданов подвес с тремя степенями свободы и тремя стабилизирующими электродвигателями СД1, СД2, СД3, которые отрабатывают сигналы рассогласования соответствующих следящих систем [2]. На чертеже угловые рассогласования соответствуют началу процесса гирокомпассирования, а система координат OXnYnZn, связанная с платформой, не совпадает с системой координат OLNξ, оси которой ориентированы по сторонам света, причем ось ON направлена на север, ось OL направлена по вертикали места, а ось Oξ направлена на восток. Тогда плоскость NOξ является плоскостью горизонта, а LON - плоскостью меридиана. Эта CK имеет проекции угловой скорости ωЗ суточного вращения Земли: горизонтальную ωN = ωЗcosϕ = ωг и вертикальную ωL = ωЗsinϕ = ωв.
Взаимное положение CK OXnYnZn и OLNξ определяется углами α1, α2, α3 поворота платформы, которые имеют место при произвольном состоянии платформы. Указанные углы могут иметь различные значения, поэтому перед гирокомпасированием гиростабилизатора необходимо привести платформу в исходное положение, которое характеризуется тем, что оси чувствительности горизонтальных гироскопов Г2 и Г3 вместе с платформой горизонтируют при помощи следящих систем (см. чертеж). Для этого используют сигналы от окселерометров А2, А3 через усилители коррекции с коэффициентами передачи К2, К3, датчики моментов ДМ2 и ДМ3. Далее сигналы с датчиков угла ДУ2, ДУ3 гироскопов Г2, Г3 через усилители УСС2, УСС3 поступают на стабилизирующие двигателями СД2, СД3, которые поворачивают платформу вместе с гироскопами и акселерометрами к установившимся значениям углов α2 = α20, α3 = α30
Вертикальный гироскоп при этом вертикализуется, а его ось чувствительности удерживается в вертикальном положении при помощи следящей системы в составе: датчика угла ДУα1, усилителя с коэффициентом К1 и далее, как показано на чертеже, по цепочке ДМ1, ДУ1, УСС1 и СД1.
При включении ключа Kn в верхнее положение платформа переходит в режим гирокомпаса, т.е. по сигналу акселерометра А3, пропорционального углу α3 отклонения платформы от плоскости горизонта и сигналу от формирователя 4 производной  которые суммируются в усилителе коррекции, на датчиках момента ДМ1 и ДМ3 формируются моменты коррекции M
которые суммируются в усилителе коррекции, на датчиках момента ДМ1 и ДМ3 формируются моменты коррекции M
M
где  соответствует погрешности формирователя
соответствует погрешности формирователя  Тогда уравнение движения платформы относительно двух осей OYn и OAZn примут вид
Тогда уравнение движения платформы относительно двух осей OYn и OAZn примут вид
где правые части уравнений аналогичны указанным на стр. 598, но с одним дополнением S11 S11 = K11/H1,
S11 = K11/H1,
Математическое моделирование уравнений (2) с учетом равенств (3) показало, что введение производной угла  в закон коррекции вертикального гироскопа способствует повышению быстродействия режима гирокомпасирования ТГС.
в закон коррекции вертикального гироскопа способствует повышению быстродействия режима гирокомпасирования ТГС.
Степень повышения быстродействия гирокомпасирования зависит от выбора коэффициентов K1, K11, K3.
Действительно, решение уравнений (2) имеет вид
где α10, α30 - начальные углы отклонения платформы от плоскости меридиана и горизонта соответственно, α12(t), α32(t) - частные решения, определяемые правыми частями уравнений (3), h1 = (K3+ωгK11)/2, ω
Найдено оптимальное соотношение коэффициентов K1, K11, K3, при которых время приведения платформы от начального угла α10 = 90o к направлению меридиана с погрешностью Δα1 = ± 10 угл.мин. составило не более t в законе управления вертикальным гироскопом это время составляет tпр = 980 сек, т.е. предлагаемый способ гирокомпасирования имеет повышенное быстродействие, приблизительно в 980/90 ≃ 12 раз, по сравнению с известными, при сохранении той же точности.
в законе управления вертикальным гироскопом это время составляет tпр = 980 сек, т.е. предлагаемый способ гирокомпасирования имеет повышенное быстродействие, приблизительно в 980/90 ≃ 12 раз, по сравнению с известными, при сохранении той же точности.
Приведенные результаты исследований подтверждают, что заявленная цель изобретения может быть достигнута.
Источники информации
1. Б. И.Назаров и др. Командно-измерительные приборы. МО СССР, 1987, с. 588.
2. Там же. с. 592-605.
3. В.Б.Давыдов и др. Функциональная обработка сигналов в автономных системах навигации и управления подвижными объектами. Приборостроение N 4, 1990, с.37-42.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
| САМООРИЕНТИРУЮЩИЙСЯ В АЗИМУТЕ ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2123664C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 2010 |
|
RU2428658C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ИЗМЕНЯЮЩИМСЯ ТОКАМ КОРРЕКЦИИ | 2012 |
|
RU2509979C1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| Способ определения азимута платформы трёхосного гиростабилизатора по отклонению угла поворота гироскопа от расчётного значения | 2016 |
|
RU2649063C1 |
| Способ определения азимута трёхосного гиростабилизатора по углу поворота гироскопа | 2020 |
|
RU2729515C1 |
Способ предназначен для азимутального ориентирования подвижных объектов, имеющих в системах управления гиростабилизаторы, и позволяет сократить временные затраты при определении направления меридиана трехосным гидростабилизатором без потери точности. В исходном положении при помощи двух горизонтальных акселерометров оси чувствительности двух горизонтальных гироскопов горизонтируют вместе с платформой, на которой они установлены. Ось чувствительности вертикального гироскопа вертикализируют. В режим гирокомпаса платформу переключают путем формирования при помощи датчика момента вертикального гироскопа момента коррекции, пропорционального углу отклонения платформы от плоскости горизонта и дополнительного момента коррекции, пропорционального производной этого угла. 1 ил.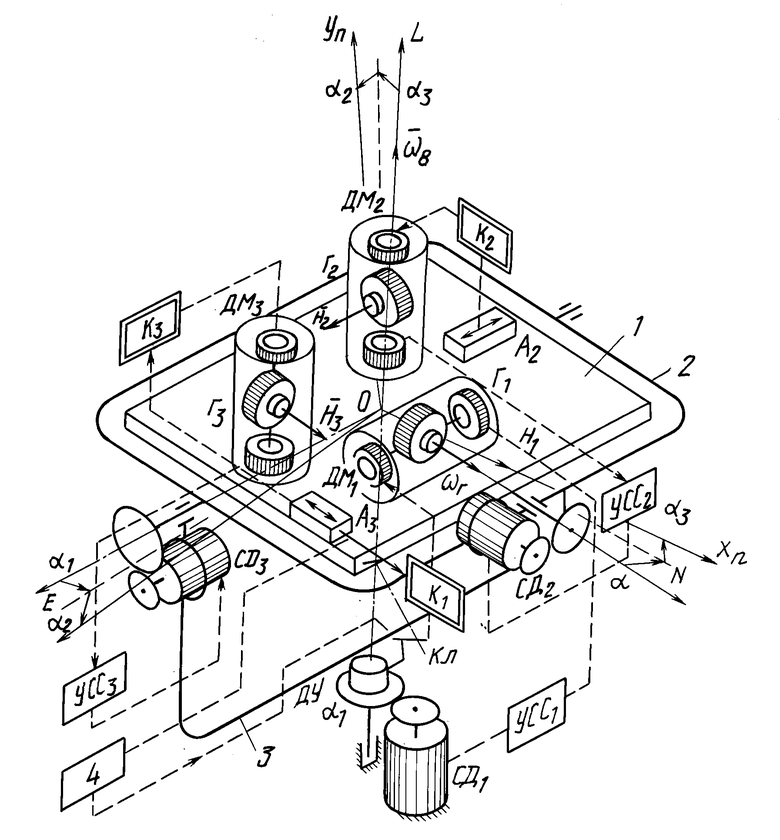
Способ гидрокомпасирования трехосного гиростабилизатора, заключающийся в том, что в исходном положении при помощи двух горизонтальных акселерометров оси чувствительности двух горизонтальных гироскопов горизонтируют вместе с платформой, на которой они установлены, а ось чувствительности вертикального гироскопа устанавливают в вертикальное положение, затем платформу переключают в режим гирокомпаса путем формирования при помощи датчика момента вертикального гироскопа момента коррекции, пропорционального углу отклонения платформы от плоскости горизонта, отличающийся тем, что, с целью сокращения временных затрат, дополнительно измеряют первую производную угла отклонения платформы от плоскости горизонта и формируют дополнительный момент коррекции, пропорциональный этой производной.
| Назаров Б.И | |||
| и др | |||
| Командно-измерительные приборы | |||
| - М.: МО СССР, 1987, с.592 - 605 | |||
| US 4472978 A, 25.09.84 | |||
| ПОДВЕСНОЙ СВОД МАРТЕНОВСКОЙ ПЕЧИ | 0 |
|
SU368457A1 |
| СТАБИЛИЗИРОВАННАЯ В ПЛОСКОСТИ ГОРИЗОНТА ГИРОПЛАТФОРМА | 1993 |
|
RU2047093C1 |
