Изобретение относится к электротехнике и может быть использовано в механизмах общепромышленного назначения, в частности в регулируемых электроприводах на базе асинхронного двигателя с короткозамкнутым или с фазовым ротором (в режиме двойного питания) и тиристорного преобразователя частоты с непосредственной связью и естественной коммутацией без датчика скорости или положения на валу двигателя.
Известен способ управления (Cистемы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями /Слежановский О.В., Дацковский Л.Х. и др. - М.: Энергоатомиздат, 1983, с. 130 - 137), заключающийся в том, что асинхронный двигатель, получающий питание от преобразователя частоты, снабженного регулятором фазных токов, подчиненным регулятору скорости, которым управляют в функции скольжения, измеренного с помощью импульсного датчика на валу двигателя, и формируют на выходе сигнал задания на модуль и частоту тока.
Этот способ не позволяет оптимизировать механические и энергетические характеристики асинхронной машины при изменении ее скорости вращения и момента нагрузки и предполагает наличие датчика на валу двигателя, что в ряде случает неприемлемо.
Наиболее близким к изобретению является способ управления (авт. св. СССР N1837379, кл. H 02 P 5/408, опублик. в БИ N 32 1993), заключающийся в том, что асинхронный двигатель с короткозамкнутым ротором питается от преобразователя частоты с непосредственной связью и естественной коммутацией, работающего в режиме источника тока, снабженного регулятором фазных токов, подчиненному регулятору скорости, которым управляют в функции разности мгновенных значений заданной и измеренной ЭДС двигателя. Векторная диаграмма, иллюстрирующая этот способ регулирования скорости в двигательном режиме, построена в относительных единицах.
Регулятор работает следующим образом.
В режиме холостого хода момент Mx=0, скольжение S*= tgθ = 0 ,  и, следовательно,
и, следовательно,
с увеличением нагрузки в двигательном режиме Mx>0, Sx>0, следовательно,
Недостатком такого алгоритма работы регулятора скорости являются:
непостоянство коэффициента усиления регулятора при изменении частоты [ΔI
уменьшение сигнала задания на реактивную составляющую тока I
неоптимальное и неконтролируемое соотношение сигналов задания на модули активного (I
Анализ приведенного уровня техники свидетельствует о том, что задачей изобретения является создание способа управления электроприводом, позволяющего:
расширить диапазон регулирования скорости электропривода за счет увеличения жесткости механических характеристик асинхронного двигателя;
оптимизировать энергетические характеристики асинхронного двигателя (КПД, cos ϕ) при изменениях момента за счет контролируемого соотношения I
сократить число элементов, входящих в состав регулятора скорости, и за счет этого упростить его настройку.
Это достигается тем, что в известном способе управления электроприводом на базе трехфазного асинхронного двигателя, когда фазные обмотки статора двигателя запитывают от трехфазного тиристорного преобразователя частоты с непосредственной связью и естественной коммутацией, работающего в режиме источника тока, который реализуют регулированием фазных токов, обеспечивающим их пропорциональность сигналов задания на токи, формируемым на выходе регулятора скорости, на входе которого подают сигнал задания частоты вращения и фазные ЭДС двигателя - задающим генератором регулятора скорости, управляют сигналом задания на частоту, вырабатывая на его выходе трехфазные системы сигналов задания на базисные токи и базисные ЭДС, находящиеся соответственно в квадратуре, модули которых определяются соответствующими сигналами задания, при этом сигнал задания на модуль базисной ЭДС определяют умножения сигнала задания модуля базисного тока ни сигнал задания на частоту, сигнал задания на модуль базисного тока определяют суммированием сигнала задания на модуль базисного тока в режиме холостого хода и модуля сигнала приращения сигнала задания на ток, который получают интегрированием разности сигнала задания на базисную ЭДС данной фазы и ЭДС соответствующей фазы двигателя, а сигнал задания на ток каждой фазы определяют суммированием сигнала задания на базисный ток данной фазы и соответствующего сигнала приращения сигнала задания на ток.
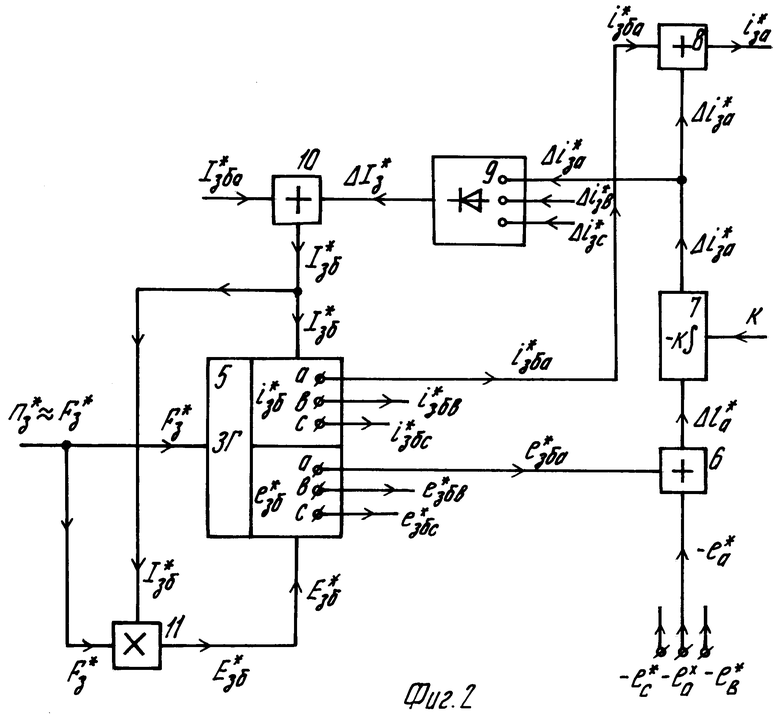
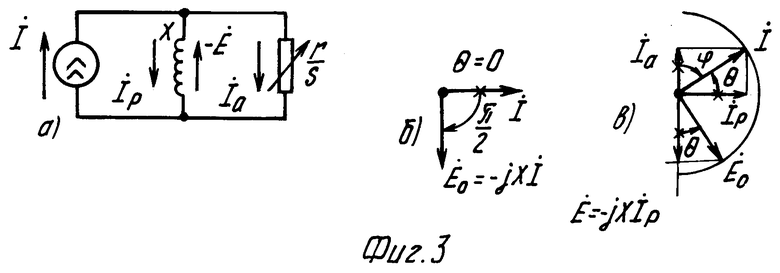
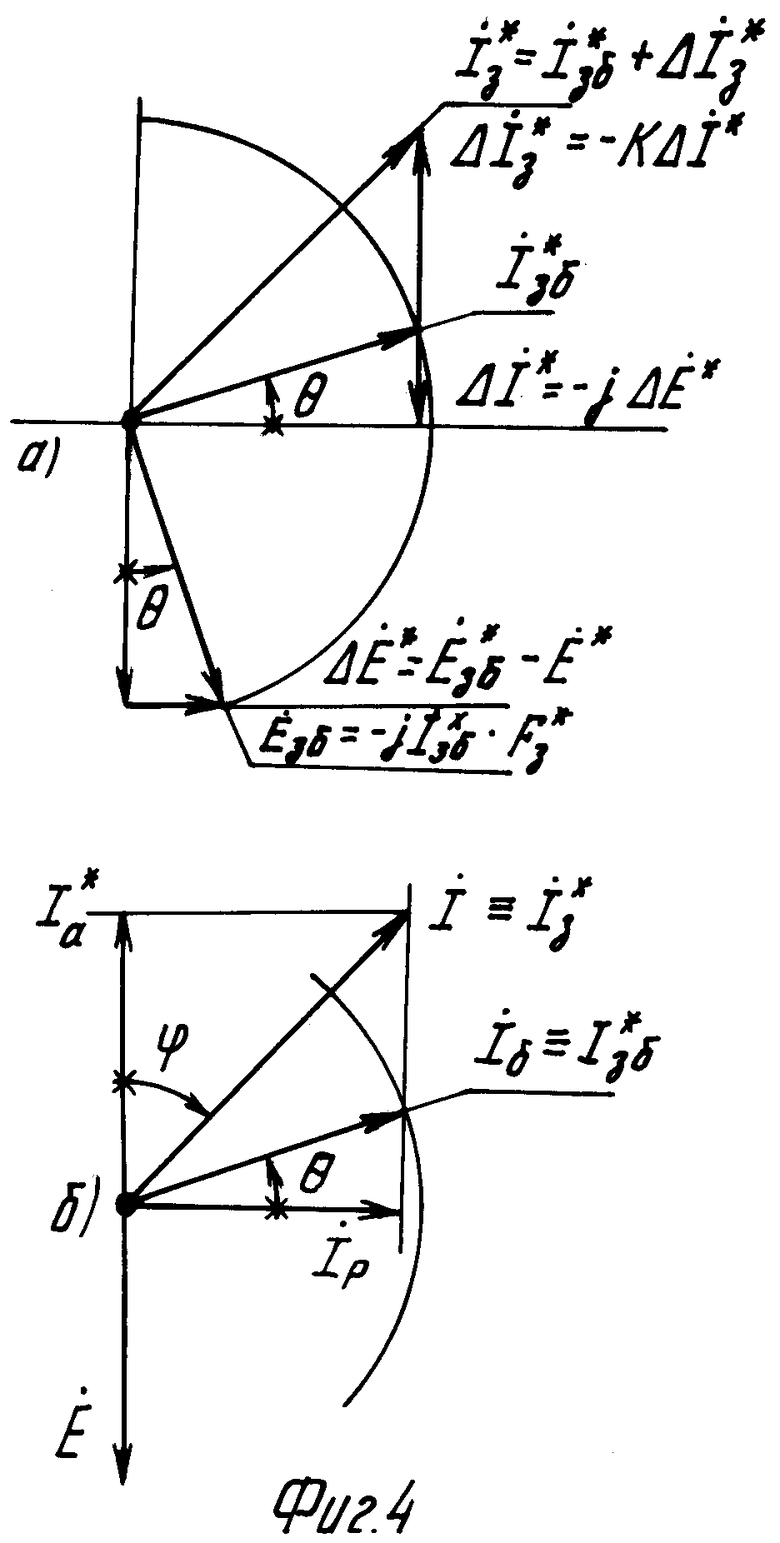
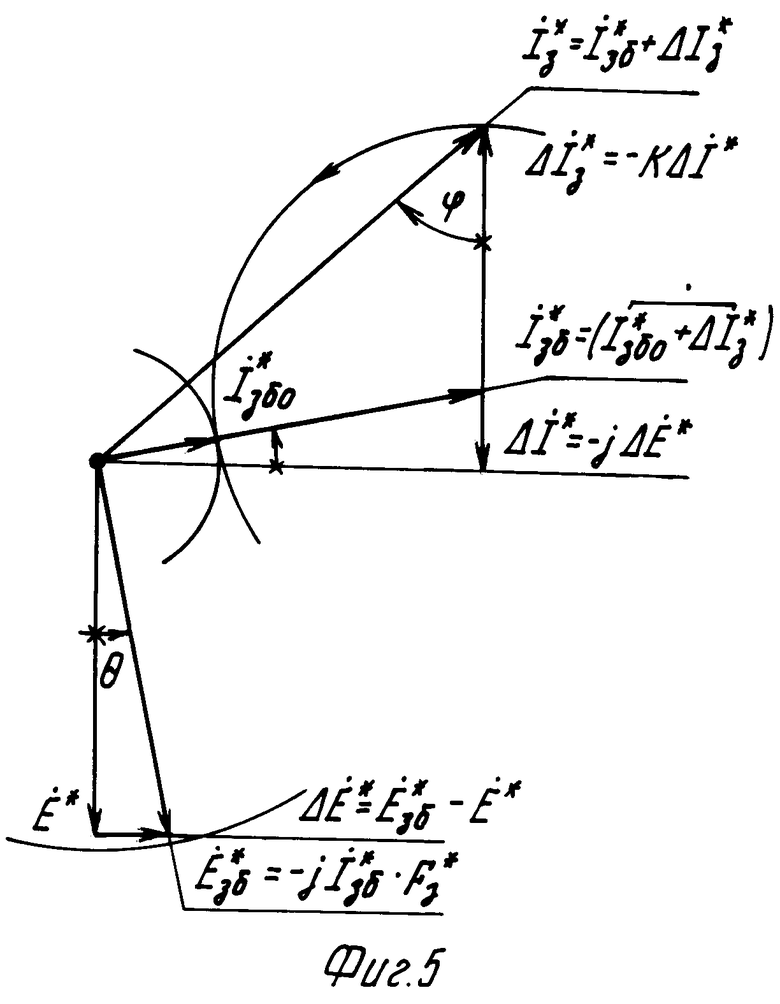
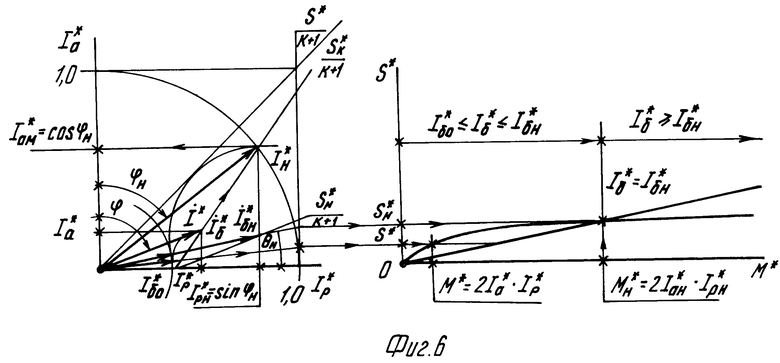
На фиг. 1 приведена структурная схема электропривода, реализующая предлагаемый способ; на фиг. 2 - функциональная схема регулятора скорости, реализующего предлагаемый алгоритм управления; на фиг. 3 - схема замещения, справедливая для рабочего участка механической характеристики асинхронного двигателя с короткозамкнутым ротором (в диапазоне скольжений  ), и векторные диаграммы, характеризующие его режимы при питании от источника тока; на фиг. 4 - векторные диаграммы, иллюстрирующие алгоритм работы регулятора скорости с постоянным модулем базисного тока и соответствующие режимы асинхронного двигателя; на фиг. 5 - векторная диаграмма, иллюстрирующая алгоритм работы регулятора скорости с переменным модулем базисного тока предлагаемый алгоритм); на фиг. 6 - векторная диаграмма асинхронного двигателя, иллюстрирующая режимы его работы с регулятором скорости, реализующим предлагаемый алгоритм, и механические характеристики асинхронного двигателя по алгоритмам фиг. 4 и 5 соответственно.
), и векторные диаграммы, характеризующие его режимы при питании от источника тока; на фиг. 4 - векторные диаграммы, иллюстрирующие алгоритм работы регулятора скорости с постоянным модулем базисного тока и соответствующие режимы асинхронного двигателя; на фиг. 5 - векторная диаграмма, иллюстрирующая алгоритм работы регулятора скорости с переменным модулем базисного тока предлагаемый алгоритм); на фиг. 6 - векторная диаграмма асинхронного двигателя, иллюстрирующая режимы его работы с регулятором скорости, реализующим предлагаемый алгоритм, и механические характеристики асинхронного двигателя по алгоритмам фиг. 4 и 5 соответственно.
Электропривод содержит (фиг. 1) асинхронный двигатель (АД) 1, трехфазно-трехфазный тиристорный преобразователь частоты (ПЧНСЕК) 2, три регулятора тока (РТ) 3, регулятор скорости (РС) 4, в состав которого входят (фиг. 2) задающий генератор (ЗГ) 5, три первых сумматора 6, три интегратора 7, три входных сумматора 8, блок определения модуля сигнала приращения сигнала задания на ток 9, третий сумматор 10, умножитель 11 сигнала задания модуля базисного тока на сигнал задания на частоту.
Асинхронный двигатель 1 общепромышленного применения с короткозамкнутым ротором.
Преобразователь частоты 2 с непосредственной связью и естественной коммутацией может быть выполнен на тиристорах по трехфазно-трехфазной мостовой схеме с раздельным управлением.
Регуляторы фазных токов асинхронного двигателя 3 выполняются по авт.св. СССР NN 1012402, 1023620, 1117817, 1261079 и 1343514.
В состав регулятора 4 скорости входят:
задающий генератор 5, который выполняется по известной схеме преобразования постоянного уровня напряжения в синусоидальные сигналы;
сумматоры 6, 8 и 10 - операционные усилители с суммирующими входами;
интеграторы 7 - интегрирующие операционные усилители;
блок определения модуля 9 - трехфазный выпрямитель переменных сигналов;
умножитель 11 - выполняется на основе микросхемы, например 525ПС2.
Управление электроприводом осуществляется следующий образом.
Преобразователь частоты 2 (фиг. 1) работает в режиме источника тока, т. е. полезные составляющие токов ia, ib, ic на его выходе, являющиеся соответствующими токами фаз двигателя 1, пропорциональны соответствующим сигналам задания на выходе регуляторов фазных токов 3 iза, iзв, iзс, которые являются выходными сигналами регулятора скорости 4.
Особенности режимов асинхронного двигателя, получающего питание от источника тока, иллюстрируются схемой замещения фиг. 3а и соответствующими ей векторной диаграммой для режима холостого хода (фиг. 3,б) и векторной диаграммой для двигательного режима (фиг. 3,в), из анализа которых следует, что с ростом момента (θ>0) и ростом, следовательно, активной составляющей тока Ia - реактивная составляющая тока Ip, определяющая магнитный поток, уменьшается, а это приводит к ограничению критического момента на уровне, не превышающем при номинальном токе номинальный момент ( M
Возможная реализация такого алгоритма иллюстрирует фиг. 4; задающий генератор вырабатывает сигнал задания на базисный ток  , определяющий реактивную составляющую тока двигателя в режиме холостого хода
, определяющий реактивную составляющую тока двигателя в режиме холостого хода  , и сигнал задания на базисную ЭДС
, и сигнал задания на базисную ЭДС  , соответствующий ЭДС двигателя в режиме холостого хода Eo, тогда управляющий сигнал определится разностью
, соответствующий ЭДС двигателя в режиме холостого хода Eo, тогда управляющий сигнал определится разностью  и может быть преобразован через
и может быть преобразован через  в сигнал задания на ток
в сигнал задания на ток  .
.
Этот алгоритм, однако, не является оптимальным в энергетическом смысле, выраженном известным критерием М.П.Костенко
из которого (фиг. 4) следует
т. е. для оптимизации характеристик асинхронного двигателя при регулировании следует во всех режимах f*, M* поддерживать постоянным отношение активной и реактивной составляющих тока двигателя, при этом будет поддерживаться постоянство коэффициента мощности, абсолютного скольжения, минимизировать ток и потери.
Предлагаемая реализация такого алгоритма иллюстрируется фиг. 5, где
I
и определяет ток двигателя в режиме холостого хода Iро. Фиг. 6 иллюстрирует формирование механических характеристик двигателя при постоянном I
Функциональная схема регулятора скорости, реализующая алгоритм, соответствующий фиг. 5, представлена на фиг. 2.
Настройка регулятора в системе электропривода сводится к установке максимального K (коэффициента интегратора 7), при котором не возникают колебательные режимы, и затем, к регулировке уставки I
Результаты экспериментальных исследований системы электропривода, в которой был реализован предлагаемый способ управления, подтвердили изложенные выше эффекты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2326480C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2582202C1 |
| Электропривод | 1991 |
|
SU1837379A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
Изобретение используется в частотно-регулируемых электроприводах общепромышленного применения путем формирования сигналов задания на фазные токи асинхронного двигателя в частотно-токовых системах электропривода на базе преобразователей частоты в режиме источника тока. Задающим генератором регулятора скорости управляют сигналом задания на частоту, вырабатывая на его выходе трехфазные системы сигналов задания на базисные токи и базисные ЭДС, находящиеся в квадратуре, модули которых определяют соответствующими сигнальными заданиями, при этом сигнал задания на модуль базисной ЭДС определяют умножением сигнала задания модуля базисного тока на сигнал задания на частоту, сигнал задания на модуль базисного тока определяют суммированием сигнала задания на модуль базисного тока в режиме холостого хода и модуля сигнала приращения сигнала задания на ток, который получают интегрированием разности сигнала задания на базисную ЭДС и ЭДС данной фазы двигателя, а сигнал задания на ток определяют суммированием сигнала задания на базисный ток данной фазы и соответствующего сигнала приращения сигнала задания на ток. Способ позволяет расширить диапазон регулирования скорости вращения двигателя за счет увеличения жесткости механических характеристик. 6 ил.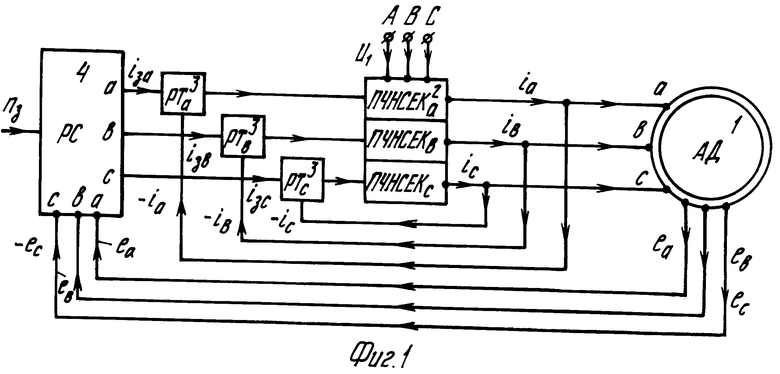
Способ управления электроприводом на базе трехфазного асинхронного двигателя, заключающийся в том, что фазные обмотки статора двигателя запитывают от трехфазного тиристорного преобразователя частоты с непосредственной связью и естественной коммутацией, работающего в режиме источника тока, который реализуют регулированием фазных токов, обеспечивающим их пропорциональность сигналам задания на токи, формируемым на выходе регулятора скорости, на входы которого подают сигнал задания частоты вращения и фазные ЭДС двигателя, отличающийся тем, что задающим генератором регулятора скорости управляют сигналом задания на частоту, вырабатывая на его выходе трехфазные системы сигналов задания на базисные токи и базисные ЭДС, находящиеся соответственно в квадратуре, модули которых определяют соответствующими сигналами задания, пр этом сигнал задания на модуль базисной ЭДС определяют умножением сигнала задания модуля базисного тока на сигнал задания на частоту, сигнал задания на модуль базисного тока определяют суммированием сигнала задания на модуль базисного тока в режиме холостого хода и модуля сигнала приращения сигнала задания на ток, который получают интегрированием разности сигнала задания на базисную ЭДС данной фазы и ЭДС соответствующей фазы двигателя, а сигнал задания на ток каждой фазы определяют суммированием сигнала задания на базисный ток данной фазы и соответствующего сигнала приращения сигнала задания на ток.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями | |||
| Слежаковский О.В., Дацковский А.Х и др | |||
| - М.: Энергоатомиздат, 1983, с | |||
| Реверсивный дисковый культиватор для тросовой тяги | 1923 |
|
SU130A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство 1837379, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
