Изобретение относится к ракетной технике, более конкретно к способам запуска и конструкции управляемых ракет.
В настоящее время одной из актуальных задач проектирования малогабаритных летательных аппаратов является снижение начальной скорости полета, которая позволяет улучшить эксплуатационные характеристики изделия (например создает возможность стрелять из закрытых помещений).
Вместе с тем, при решении указанной задачи необходимо учитывать обстоятельства, связанные с обеспечением допустимого рассеивания изделий к моменту начала управления в условиях повышения чувствительности изделия к возмущениям и несимметрии планера, вызванного уменьшением начальной скорости изделия.
К факторам, способным изменить чувствительность изделия (в частности, к эксцентриситету двигательной установки и несимметрии планера), относится угловая скорость вращения ракеты по крену.
Известен способ запуска управляемой ракеты, включающий запуск двигателя ракеты и ее разгон под действием силы тяги двигателя с одновременной раскруткой ракеты относительно ее продольной оси под действием момента, создаваемого специальным устройством, описанным в [1].
Описанное устройство включает в себя натяжной трос, закрепленный на месте запуска и разматываемый с катушки, установленной в хвостовой части ракеты. Указанный трос используется также для передачи сигналов управления от поста наведения к снаряду.
Стабилизация ракеты обеспечивается во время полета за счет воздействия натяжного троса на хвостовую часть ракеты при его разматывании с катушки.
Однако такой способ стабилизации ракеты имеет ряд недостатков.
Во-первых, описанный способ стабилизации ракеты целесообразно применять в ракетах, использующих проводную систему наведения, где натяжной трос служит также проводом для передачи сигналов управления. В ракетах же с лучевой системой наведения применение натяжного троса для стабилизации ракеты приводит к увеличению пассивной массы ракеты, увеличению габаритных размеров и как следствие к ухудшению характеристик ракеты.
Во-вторых, описанный способ стабилизации не эффективен на начальном участке траектории ракеты, когда скорость полета, а следовательно, и скорость разматывания троса невелики.
Известен способ запуска управляемой ракеты, включающий запуск двигателя ракеты и ее разгон под действием силы тяги двигателя с одновременной раскруткой ракеты относительно ее продольной оси под действием момента, создаваемого аэродинамическим силами. Данный способ реализуется в ракете "Милан", снабженной разгонно-маршевым двигателем и косопоставленными крыльями [2]. После запуска ракета разгоняется под действием разгонно-маршевого двигателя и раскручивается относительно продольной оси ракеты за счет взаимодействия косопоставленных крыльев с набегающим потоком воздуха.
Известно, что система управления ракеты устойчиво работает в определенном интервале угловой скорости вращения, причем очевидно, что наибольшая точность управления обеспечивается при нахождении угловой скорости в заданном интервале. Однако при наличии жесткозакрепленных косопоставленных крыльев угловая скорость вращения оказывается переменной и находится в прямой зависимости от текущей скорости полета ракеты. Таким образом, на разгонном участке (особенно в начале полета) система управления работает вне пределов заданного интервала угловой скорости ракеты и обеспечивает низкую точность управления.
Известен также газодинамический способ стабилизации ракеты, который использует истечение продуктов сгорания топлива через косопоставленные сопла или специальные отверстия [3] . Продукты сгорания, истекая из косопоставленных сопел или специальных наклонных отверстий, придают ракете вращательное движение относительно ее продольной оси в сторону, противоположную истечению. Такая конструкция позволяет стабилизировать ракету на начальном участке траектории, однако она обладает рядом недостатков.
Во-первых, проворачивание ракеты относительно ее продольной оси осуществляется только во время работы двигателя, а после его выключения вращательное движение ракете не придается. Следовательно, на пассивном участке траектории ракета может потерять устойчивость.
Во-вторых, применение косопоставленных сопел или специальных наклонных отверстий приводит к ухудшению характеристик ракеты (уменьшению скорости полета, дальности), так как радиальная составляющая тяги создается в течение всего времени работы двигателя.
Целью предлагаемого изобретения является повышение точности управления ракетой на разгонном участке путем стабилизации угловой скорости вращения ракеты. Поставленная цель достигается тем, что согласно способу запуска управляемой ракеты включающему запуск двигателя ракеты и ее разгон под действием тяги двигателя с одновременной раскруткой ракеты относительно ее продольной оси под действием момента, создаваемого двигателем и аэродинамическими силами, момент, создаваемый двигателем, уменьшают в процессе работы двигателя.
Предлагаемое решение иллюстрируется графическим материалом, где на фиг. 1 изображены зависимости числа оборотов ракеты по времени при различных способах реализации этого вращения, на фиг. 2 изображен общий вид ракеты, на фиг. 3 - поперечное сечение ракеты по месту смещения сверхзвуковых частей сопел, на фиг. 4 - продольное сечение ракеты по месту смещения сверхзвуковых частей сопел.
Известно линеаризованное уравнение движения ракеты в канале крена (см., например, [4]).
где
γ - угол крена;
δст - угол установки стабилизатора;
h - плечо сопла;
R - тяга двигателя;
Jxx - полярный момент инерции ракеты;
ϕc - угол установки сопла; динамические коэффициенты, определяемые по формулам
динамические коэффициенты, определяемые по формулам
 производные коэффициента момента крена по безразмерной угловой скорости и углу установки стабилизатора соответственно,
производные коэффициента момента крена по безразмерной угловой скорости и углу установки стабилизатора соответственно,
q - скоростной напор,
ρ - плотность,
V - скорость набегающего потока воздуха,
S, L - характерная площадь и длина соответственно.
При установившейся угловой скорости вращения по крену
Поскольку движения по крену, вызванные крутящим моментом от крыла и двигателя, независимы - их можно разделить. Рассмотрим установившееся движение по крену, вызванное крутящим моментом от двигателя
Принимая во внимание (2)
Аналогично для косопоставленного оперения
Увеличение до определенных пределов ωx приводит к уменьшению чувствительности ракеты к указанным выше факторам.
Решение поставленной задачи за счет начальной угловой скорости вращения ωxo, при наличии угла установки стабилизатора, обеспечивающего создание момента крена ωx, не дает положительного результата, т.к. ωxo согласно (1) ввиду малости V0 быстро демпфируется.
На фиг. 1 приведены зависимости ωx(t) для движения за счет создания ωx косопоставленным оперением при ωxo = 0 (кривая 1) и ωxo > 0 (кривая 2).
Если вращение изделия осуществляется за счет косопоставленных сопел, то зависимость ωx(t) будет выглядеть как кривая 3 на фиг. 1. Видно, что влияние двигателя на ωx в отличии от влияния косопоставленного оперения значительно уменьшается со временем ввиду роста скорости, что согласуется с формулами (3) и (4). При этом ωx значительно превышает необходимые значения на временах, больших времени начала управления.
Для обеспечения равномерного вращения изделия по крену необходимо изменять угол установки сопла ϕc по времени или тангенциальную составляющую силы тяги таким образом, чтобы суммарное значение ωx (от оперения и сопел) оставалось практически неизменным (кривая 4 на фиг. 1).
Способ реализуется в управляемой ракете, снабженной косопоставленными крыльями и ракетным двигателем с многосопловым блоком, сверхзвуковые части сопел которого выполнены из эррозирующего материала таким образом, что их оси смещены относительно осей критических сечений сопел в сторону, противоположную вращению ракеты.
Ракета 1 содержит косопоставленные крылья 4, двигатель 2 с соплами 3, сверхзвуковые части 5 сопел 3 выполнены из эррозирующего материала 6, при этом их оси 7 смещены относительно осей 8 критических сечений 9 сопел 3 на величину "a" (или угол ϕc) в сторону, противоположную вращению ракеты (противоположно стрелке 10).
Способ осуществляется следующим образом. После запуска двигателя 2 и старта ракеты 1 происходит ее разгон под действием силы тяги двигателя. Взаимодействие набегающего потока воздуха и косопоставленных крыльев 4 создает аэродинамический момент, величина которого прямо пропорциональна скорости полета ракеты (формула 4). Поэтому аэродинамический момент будет изменяться от минимального значения в начальный момент с увеличением его в течение времени до максимального значения к концу разгонного участка работы двигателя.
Одновременно, при срабатывании двигателя 2 газы, истекающие из косопоставленных сопел 3, отклоняются относительно оси ракеты 1 в сторону, противоположную вращению ракеты, в результате чего появляются тангенциальные составляющие силы тяги, направленные в сторону вращения ракеты (в сторону аэродинамического момента) и создающие газодинамический момент, суммирующийся с моментом, создаваемым аэродинамическими силами. Для стабилизации величины угловой скорости ращения ракеты 1 на разгонном участке угол разворота газового потока делают переменным, изменяющимся от максимального значения в начале полета до минимального значения в конце разгонного участка, так что суммарный момент оказывается практически постоянным на разгонном участке.
Способ реализуется следующим образом. Продукты сгорания порохового заряда, имеющие высокую температуру и скорость, истекают из сопел 3. Вследствие смещения осей 7 сверхзвуковых частей 5 сопел 3 относительно осей 8 критических сечений 9 сопел 3 в сторону, противоположную вращению ракеты, создается несимметрия истечения и появляется момент от силы тяги, направленный в сторону вращения ракеты. В начальный момент времени (сразу после начала работы двигателя) величина момента от работы двигателя 2 максимальна, а величина момента от крыльев 4 минимальна из-за малой начальной скорости полета. При этом очевидно, что поверхность B сверхзвуковой части 5 сопел 3 подвергается более интенсивному воздействию газового потока (более интенсивному торможению газа на поверхности B), а выполнение сверхзвуковой части 5 сопел 3 из эрозирующего материала 6, преимущественно ДВС-4-Р-2М марки О, - и более интенсивному процессу эрозии. В результате этого величина смещения сверхзвуковых частей "a" (или угол  уменьшается в процессе работы двигателя, уменьшается несимметрия истечения газов, а следовательно, уменьшается момент, создаваемый двигателем 3.
уменьшается в процессе работы двигателя, уменьшается несимметрия истечения газов, а следовательно, уменьшается момент, создаваемый двигателем 3.
Однако одновременно в этим увеличивается скорость ракеты 1, что приводит к увеличению момента, создаваемого косопоставленными крыльями 4. Таким образом, суммарный момент, действующий на ракету 1, оказывается на разгонном участке практически постоянным и при достижении определенной величины угловой скорости компенсируется демпфирующим аэродинамическим моментом, возникающим на крыльях, что приводит к стабилизации скорости вращения ракеты 1 на практически всем активном участке траектории.
Величина угловой скорости регулируется за счет угла разворота крыльев 4, величины смещения сверхзвуковых частей сопел "а" (или угла  подбора эрозирующего материала и обеспечивает оптимальные условия работы системы управления. Величина смещения сверхзвуковых частей сопел в предлагаемом изобретении специально не оговаривается и определяется для каждого конкретного случая отдельно, исходя из требуемой угловой скорости вращения ракеты, времени работы двигателя, а также характеристик эрозирующего материала.
подбора эрозирующего материала и обеспечивает оптимальные условия работы системы управления. Величина смещения сверхзвуковых частей сопел в предлагаемом изобретении специально не оговаривается и определяется для каждого конкретного случая отдельно, исходя из требуемой угловой скорости вращения ракеты, времени работы двигателя, а также характеристик эрозирующего материала.
Таким образом, использование предлагаемого изобретения позволит повысить точность управления ракетой на разгонном участке за счет уменьшения разброса величины угловой скорости вращения ракеты. В управляемой ракете смещение сверхзвуковых частей сопел создает вращающий момент, в то же время выполнение сверхзвуковых раструбов из эрозирующего материала позволяет уменьшать момент вращения, создаваемый двигателем, в процессе его работы и, соответственно, стабилизировать величину угловой скорости.
Источники информации
1. Патент Франции N 2151890, МКИ5 F 42 b 15/00// F 42 b 10/00.
2. Журнал L'Arme'e, 1969, апрель N 86 стр. 62-65.
3. В.В.Рожков "Ракетные двигатели твердого топлива", Военное издательство министерства обороны СССР, Москва, 1963 г, стр. 18-19, рис. 2б.
4. А. А. Лебедев, Л.Е.Чернобровкин "Динамика ракеты", М., 1973 г., стр. 592.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХСТУПЕНЧАТАЯ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 1996 |
|
RU2110755C1 |
| УПРАВЛЯЕМАЯ РАКЕТА | 1998 |
|
RU2135944C1 |
| УПРАВЛЯЕМАЯ РАКЕТА | 1995 |
|
RU2103655C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166727C1 |
| СВЕРХЗВУКОВАЯ УПРАВЛЯЕМАЯ РАКЕТА | 1996 |
|
RU2114384C1 |
| СПОСОБ СТАБИЛИЗАЦИИ РАКЕТЫ В ПОЛЕТЕ И РАКЕТА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2247926C1 |
| НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ | 1996 |
|
RU2114369C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 1997 |
|
RU2122700C1 |
| СПОСОБ ЗАПУСКА ДВУХСТУПЕНЧАТОЙ УПРАВЛЯЕМОЙ РАКЕТЫ С ВОЗДУШНОГО НОСИТЕЛЯ | 2006 |
|
RU2321825C2 |
Изобретение относится к ракетной технике. Способ запуска ракеты заключается в разгоне ракеты с помощью двигателя с одновременной раскруткой ее с помощью двигателя и аэродинамических поверхностей. При этом момент сил раскрутки, создаваемый двигателем, уменьшают в процессе разгона ракеты. Способ осуществляется ракетой, содержащей двигатель с соплами и косопоставленными аэродинамическими поверхностями. При этом сверхзвуковые части сопел выполнены из эрозирующего материала. Оси этих частей сопел смещены относительно критических сечений сопел в сторону, противоположную вращению ракеты. Использование изобретения позволяет уменьшить разброс величины угловой скорости вращения ракеты и за счет этого повысить точность управления ракетой на разгонном участке. 2 с.п.ф-лы, 4 ил.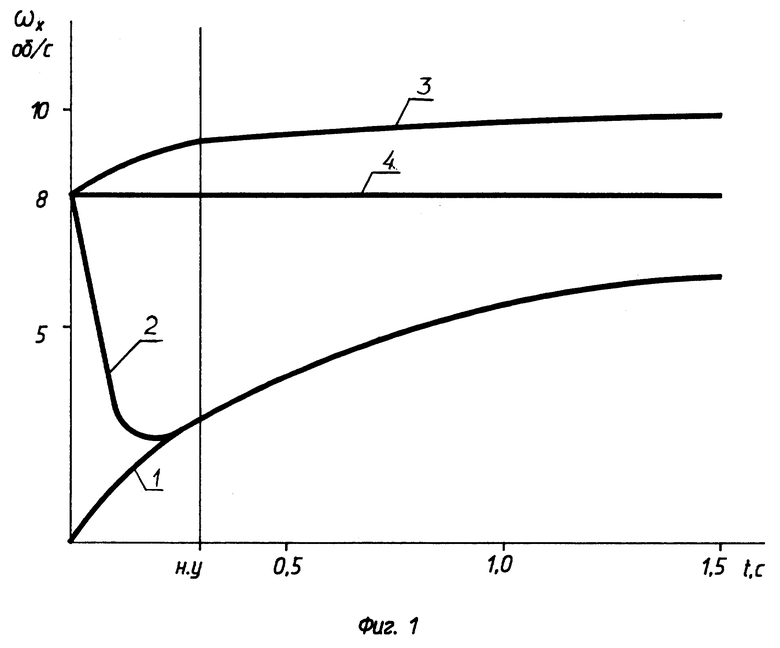
| Журнал L'Arme'e, Cazerne de Lourcine, 37 Bd de Port-Royal, Paris 13-e A.D.D | |||
| J M., 53 ba La Tour-Mauborg, Paris 7-e, 1969, апрель N 86, c.62-65 | |||
| RU 2071027, 1996 | |||
| RU 95107009, 1996 | |||
| US 5078336, 1992 | |||
| DE 3924810, 1991 | |||
| ПРОХОДНОЙ ИЗОЛЯТОР С ЗАЩИТОЙ ОТ ЭЛЕКТРОКОРРОЗИИ (ВАРИАНТЫ) | 1996 |
|
RU2151890C1 |
