Изобретение относится к области вооружения, в частности к области управляемых ракет и может быть использовано в конструкциях ракет, запускаемых из пусковых контейнеров.
Известны управляемые реактивные снаряды, запускаемые из пусковых контейнеров, например, ПТУР-ATGW-3/MR[1] , принятый за аналог. Управляемый реактивный снаряд [1] включает в себя корпус, блок стабилизатора и реактивный двигатель с боковыми соплами, расположенными на корпусе снаряда. Установка консолей стабилизатора и сопел реактивного двигателя под углом к продольной оси ракеты создает заданные значения угловой скорости вращения ракеты по крену при полете с заданной скоростью.
Недостатком таких конструкций является большой разброс оборотов в полете.
Наиболее близкой по технической сущности конструкцией является управляемый реактивный снаряд 9М111 [2], принятый за прототип. Управляемый снаряд [2] включает аэродинамические органы управления - рули, установленные на носовой части корпуса, блок стабилизатора с четырьмя консолями, установленными в хвостовой части корпуса, боевую часть и реактивный двигатель - типа разгонно-маршевого с боковыми соплами, расположенными на корпусе снаряда между консолями стабилизатора. Вращение ракеты по крену задается разворотом по крену консолей стабилизатора, а также боковых сопел двигателя на углы относительно продольной оси ракеты. При полетной скорости ракеты 100-200 м/c угловая скорость вращения по крену составляет 5-12 об/с.
Недостаток такой конструкции - это большие разбросы оборотов в полете, особенно на начальном участке полета, когда полетная скорость еще мала, а вращение задается в основном тягой реактивного двигателя. Повышенный разброс оборотов зависит из-за больших разбросов тяги заряда маршевого двигателя, значение которого при температурном диапазоне (-50oC) + 50oC может составлять 2,0-2,5 раза. Повышенный разброс оборотов на начальном участке полета приводит к большой фазовой ошибке выделения координат системы управления, к большим отклонениям управляемого снаряда от заданной траектории, к снижению эффективности стрельбы.
Целью данного изобретения является повышение вероятности встреливания управляемой ракеты в поле зрения аппаратуры управления путем уменьшения разброса оборотов в полете.
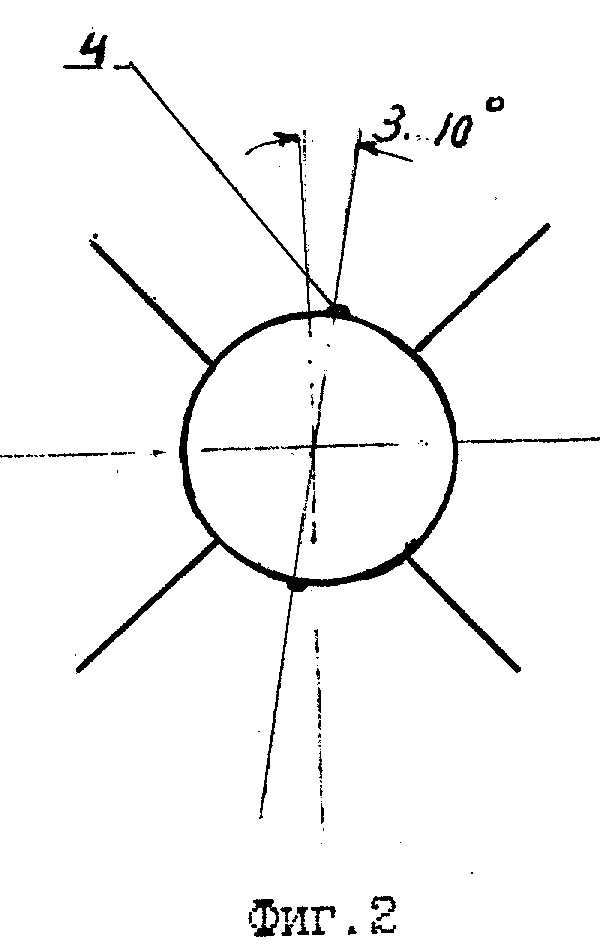
Это достигается тем, что на управляемой, вращающейся по крену ракете, боковые сопла реактивного двигателя установлены в плоскости, проходящей через продольную ось ракеты между консолями стабилизатора со смещением в угловом направлении в сторону вращения ракеты по крену на угол 3-10o. а расстояние от передней кромки консолей стабилизатора до положения боковых сопел реактивного двигателя определяется соотношением размаха консолей стабилизатора к углу наклона боковых сопел относительно продольной оси ракеты: X= Lк.ст./tg α , где Lк.ст. - размах консолей стабилизатора, α - угол наклона боковых сопел к продольной оси ракеты.
По сравнению с прототипом [2] при наличии общих конструктивных признаков и свойств управляемая ракета с предложенной конструкцией позволяет уменьшить разброс оборотов, вследствие чего, повысить вероятность встреливания в поле зрения аппаратуры управления, повысить вероятность поражения цели.
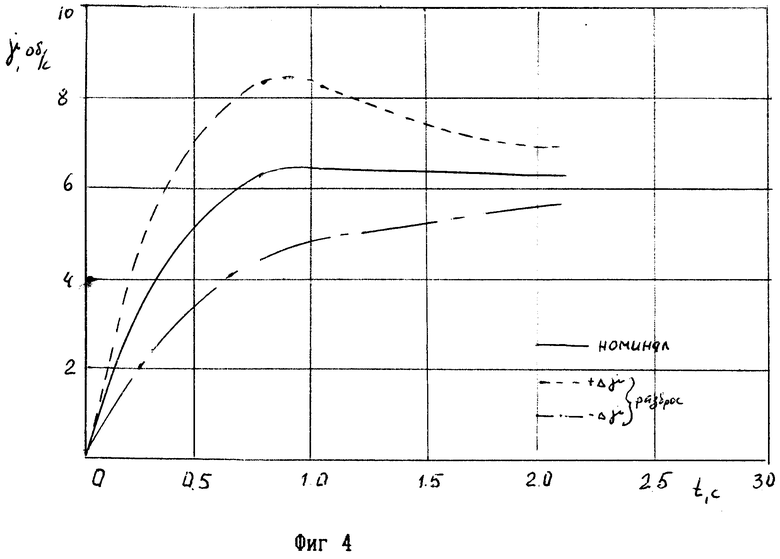
На фиг. 1, 2 приведена схема конструкции управляемой ракеты с предложенным техническим решением; на фиг. 3 - значения угловой скорости вращения ракеты (фиг. 1, 2) по крену на начальном участке полета; на фиг. 4 - обороты для прототипа [2].
Управляемая ракета [фиг. 1] содержит рули 1, боевую часть 2, реактивный двигатель 3 с боковыми соплами 4, блок стабилизатора с четырьмя консолями 5. На начальном участке, когда скорость полета ракеты еще мала, обороты ракеты полностью зависят от тяги разгонно-маршевого двигателя. Вращение ракеты за счет установки сопел по крену приводит к большим разбросам оборотов [фиг. 4] за счет того, что тяга заряда маршевого двигателя имеет большой разброс, который зависит от температуры заряда, от партии заряда и т.д. Такой разброс тяги, который достигает 1,5-2,5 раза, приводит соответственно к большому [30-50%] разбросу оборотов ракеты.
Применение предложенный конструкции управляемой ракеты привело к значительному (15-20%) уменьшению разброса оборотов.
Физически это можно объяснить тем, что эффект влияния струи на креновые аэродинамические характеристики ракеты зависит от скорости течения и положения струи при прохождении области хвостового оперения. В этом случае разброс оборотов в основном зависит от скорости струи, разброс которой при максимальном температурном диапазоне заряда двигателя +50oC составляет 10...20%.
Из приведенных экспериментальных данных [фиг.3, 4] следует, что применение предложенной конструкции ракеты приводит к уменьшению разбросов оборотов на начальном участке полета с 3-4 об/с до 1-1,5 об/с. Это позволило обеспечить полет управляемой ракеты без больших отклонений от линии визирования.
Применение предлагаемого технического решения на малогабаритных управляемых ракетах типа 9М111М [2], а также на новых перспективных разработках типа 9М133 позволило:
уменьшить разброс оборотов на начальном участке в 2,0 ...2,5 раза,
повысить вероятность встреливания в поле зрения аппаратуры управления, повысить эффективность поражения цели.
Сравнение заявляемого технического решения с прототипом позволило установить соответствие их критерию "новизна". При изучении других известных технических решений в данной области техники признаки, отличающие заявляемое изобретение от прототипа, не были выявлены и потому они обеспечивают заявляемому техническому решению соответствие критерию "существенные отличия".
Источники информации
1. ПТУР ATGW-3/MR. Обзорно-аналитический справочник, КБ приборостроения, Тула, 1993.
2. ПТУРС 9М111М. Техническое описание и инструкция по эксплуатации, М.: Военное издательство, 1983 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАПУСКА УПРАВЛЯЕМОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124694C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166724C1 |
| ВРАЩАЮЩАЯСЯ УПРАВЛЯЕМАЯ РАКЕТА | 2003 |
|
RU2241953C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1998 |
|
RU2133443C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1996 |
|
RU2114383C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ СНАРЯДОМ, РЕГУЛЯРНО ВРАЩАЮЩИМСЯ ПО УГЛУ КРЕНА С ПОМОЩЬЮ АЭРОДИНАМИЧЕСКИХ СИЛ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2131576C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2008 |
|
RU2371666C1 |
| УПРАВЛЯЕМАЯ РАКЕТА В КОНТЕЙНЕРЕ | 2004 |
|
RU2258896C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1996 |
|
RU2096735C1 |

Использование: ракетное вооружение. Сущность изобретения: управляемая, вращающаяся по крену ракета содержит рули, стабилизатор и реактивный маршевый двигатель с боковыми соплами, которые установлены со смещением в сторону вращения ракеты по углу крена на угол 3...10o относительно плоскости симметрии, проходящей между консолями стабилизатора через продольную ось ракеты. Расстояние от консолей стабилизатора до боковых сопел определено из соотношения: X= L/tg α , где X - расстояние от консолей стабилизатора до боковых сопел, L - размах одной консоли стабилизатора, α - угол наклона боковых сопел к продольной оси ракеты. 4 ил.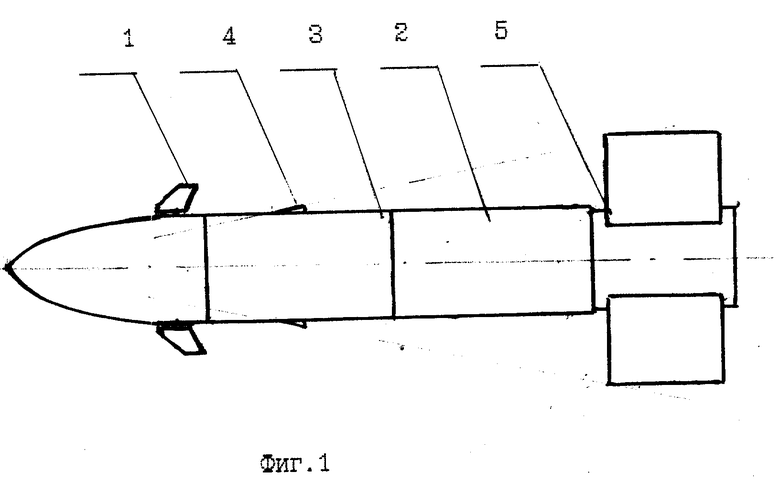
Управляемая, вращающаяся по крену ракета, выстреливаемая из пускового устройства, содержащая рули, блок стабилизаторов, реактивный маршевый двигатель с боковыми соплами, расположенными на корпусе ракеты, отличающаяся тем, что в ней боковые сопла реактивного двигателя установлены со смещением в сторону вращения ракеты по крену на угол 3 10o относительно плоскости симметрии, проходящей между консолями стабилизатора через продольную ось ракеты, а расстояние от консолей стабилизатора до боковых сопл определено соотношением
X = L/tgα,
где X расстояние от консолей стабилизатора до боковых сопл;
L размах одной консоли стабилизатора;
α - угол наклона боковых сопл к продольной оси ракеты.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| - М.: Воениздат, 1983. | |||

