Изобретение относится к мониторной системе для представления колебательных состояний множества лопаток на вращающемся рабочем колесе,
а) с неподвижным сенсорным устройством с, по меньшей мере, одним приданным рабочему колесу сенсором и связанным с ним датчиком импульсов, причем датчик импульсов служит для получения сенсорного импульса, каковой сенсорный импульс маркирует момент времени, в который лопатка проходит мимо сенсора;
b) с приданным рабочему колесу маркерным датчиком для получения маркерного импульса, когда рабочее колесо находится в определенном нулевом положении;
с) с устройством оценки с модулем придания в соответствие, который выполнен с возможностью подведения сенсорных импульсов и маркерных импульсов и который служит для придания в соответствие каждого сенсорного импульса с учетом маркерных импульсов к той лопатке, которая его вызвала, а также для преобразования сенсорных импульсов каждой лопатки в колебательные данные, которые характеризуют колебательное состояние лопатки;
d) с устройством представления со средством представления для представления колебательных данных.
Такая мониторная система следует из статьи "Beruhrungslose Schaufelschwingungstechnik" М. Gloger, включенной в отчет конференции Konferenzbericht von der VGB-Fachtagung Dampf-turbinen und Dampfturbinenbetrieb 1990, 13. Dezember 1990, Essen, стр. 4.1 -4.11, а также из патента США 4,934,192 и ЕР О327865 A2.
Изобретение относится, в частности, к представлению колебательных состояний лопаток, которые возникают во время регулярной работы турбомашины и в зависимости от компоновки при определенных рабочих состояниях или при каждом рабочем состоянии влекут за собой значительные нагрузки лопаток.
Соображения относительно компоновки лопаток, в частности лопаток для паровых турбин низкого давления, находятся в работе
"Advanced LP Turbine Blading -A Reliable and Highly Efficient Design" авторов М. Gloger, K.H. Neumann, D. Bergmann и H. Termuhlen, представленной в 1992 на международной конференции "1992 Internatiol Joint Power Generation Conference", Atlanta, Georgia/USA и опубликованной в печатном виде ASME Power Division. В этой работе представлена также мониторная система для представления колебательных состояний множества лопаток типа, названного во вводной части описания.
В работе "Beruhrungslose Schaufelschwingungstechnik" М. Gloger, включенной в отчет конференции Konferenzbericht von der VGB-Fachtagung Dampfturbinen und Dampfturbinenbetrieb 1990, 13. Dezember 1990, Essen, стр. 4.1 -4.11, находятся дальнейшие рассуждения относительно представления колебательных состояний лопаток в турбомашинах. Таким образом в настоящее описание включено все содержание этой работы.
Системы для обнаружения колебаний на лопатках турбины следуют из патента США 4,934,192 и ЕР 0327865 A2. Согласно первому документу прежде всего обнаруживают аксиальные колебания лопатки турбины, то есть колебания перпендикулярно к плоскости, в которой обращается размещенная на вращающемся рабочем колесе лопатка турбины, с помощью двух расположенных аксиально друг за другом сенсоров; обнаружение тангенциальных колебаний, то есть колебаний в плоскости, в которой обращается лопатка турбины, является возможным дополнительно. Полученные с помощью сенсоров измерительные значения оценивают, по выбору чертят в виде диаграммы и проверяют, есть ли повод для тревоги. Согласно второму названному документу из полученных подходящими сенсорами данных относительно колебаний лопатки турбины получают высказывания о накапливающейся вследствие колебаний усталости материала лопаток турбины.
Патент США 4,604,699 относится к системе для приема, оценки и представления данных, однако не в связи с применением в энергетике, а в связи с наблюдением землетрясений.
Все предшествующие мониторные системы типа, упомянутого во вводной части описания и описанного в цитированных документах уровня техники, являются пригодными для проверки от случая к случаю лопаток в таких турбомашинах, как турбины и турбокомпрессоры, однако не являются пригодными для постоянного контроля турбомашины во время ее регулярной работы. В соответствии с этим эти мониторные системы не могут использоваться для обнаружения повышенной нагрузки лопаток, которая может появляться при определенных рабочих состояниях и вследствие комплексной, существенной для выполнения колебаний геометрии лопаток и структур, которые несут лопатки, едва ли является предсказуемой с достаточной точностью. В частности, тогда, когда время от времени появляются условия работы, которые отличаются от условий работы, для которых были рассчитаны лопатки, никогда нельзя исключить, что на лопатках возникают колебания с повышенными, при известных условиях опасными амплитудами.
В соответствии с этим задачей изобретения является создание мониторной системы для представления колебательных состояний множества лопаток на вращающемся рабочем колесе, которая позволяет постоянное представление колебательных состояний и предпочтительно может отображать повышенную нагрузку лопаток за счет колебаний настолько заблаговременно, что вызывающее колебания рабочее состояние может быть прекращено до того, как появляется опасность, в частности, опасность для срока службы лопаток. Такая мониторная система должна быть, в частности, пригодной для постоянного контроля лопаток; кроме того, она должна постоянно представлять или соответственно иметь в готовности для представления существенные данные колебаний, предпочтительно для каждой лопатки.
Для решения этой задачи соответствующая изобретению мониторная система для представления колебательных состояний множества лопаток на вращающемся рабочем колесе содержит следующие компоненты:
а) неподвижное сенсорное устройство с, по меньшей мере, одним приданным рабочему колесу сенсором и связанным с ним датчиком импульсов, каковой датчик импульсов служит для получения сенсорного импульс, каковой сенсорный импульс маркирует момент времени, в который лопатка проходит мимо сенсора;
b) приданный рабочему колесу маркерный датчик для получения маркерного импульса, когда рабочее колесо находится в определенном нулевом положении;
с) устройство оценки с модулем придания в соответствие, выполненным с возможностью подведения сенсорных импульсов и маркерных импульсов и служащим для присвоения каждого сенсорного импульса с учетом маркерных импульсов той лопатке, которая вызвала его, а также преобразования сенсорных импульсов для каждой лопатки в колебательные данные, которые характеризуют колебательное состояние лопатки;
d) устройство представления со средством представления для представления колебательных данных; причем устройство оценки содержит накопительный модуль и оперативный накопитель, к которому имеет доступ накопительный модуль, который выполнен с возможностью приема для каждой лопатки множества полученных последовательно во времени колебательных данных и выведения из него колебательных данных устройством представления, причем накопительный модуль выполнен с возможностью подведения колебательных данных для всех лопаток для запоминания в оперативном накопителе и с возможностью перезапоминания или соответственно переписывания по типу сдвигового регистра уже запомненных колебательных данных при подведении новых колебательных данных.
Относительно различных составных частей мониторной системы поясняется следующее.
а) Под датчиком импульсов, которому в сенсорном устройстве придан сенсор, следует понимать любое устройство, необходимое для работы сенсора и для соединения сенсора с другими устройствами; без намерения ограничения в качестве примеров следует назвать усилитель, формирователь импульсов, электроакустический преобразователь и тому подобное. Существенной функцией датчика импульсов является предоставление выдаваемого сенсором сигнала в пригодных для дальнейшей обработки виде, форме и интенсивности.
b) Под маркерным датчиком следует понимать любое устройство, которое в значительной степени независимо от колебательных состояний лопаток выдает последовательность импульсов, а именно последовательность маркерных импульсов, которая является синхронной или, по меньшей мере, синхронизируемой с вращением рабочего колеса и которая соответственно из временного положения сенсорного импульса относительно маркерных импульсов позволяет сделать обратное заключение о том, какой лопаткой был вызван сенсорный импульс. Кроме того, при этом делается ссылка на цитированный уровень техники.
с) Относительно функции преобразования сенсорных импульсов в колебательные данные путем модуля придания в соответствие следует заметить, что это преобразование может означать любую необходимую трансформацию сенсорных импульсов; сюда относится любое известное само по себе и необходимое в зависимости от выполнения мониторной системы аналогово-цифровое преобразование, усиление и/или формирование импульсов. Сами сенсорные импульсы само собой разумеется уже представляют собой сигналы, которые характеризуют колебательное состояние лопатки и таким образом при необходимости после аналогово-цифрового преобразования могут рассматриваться как колебательные данные. Однако могут также приниматься во внимание комплексные формы преобразования, в частности такие преобразования, которые требуют арифметических операций при необходимости с предварительно обработанными сенсорными импульсами. При этом следует сослаться на ниже описанный пример выполнения.
d) Также представление колебательных данных устройством представления может быть связанным в зависимости от требования с вычислительными операциями над колебательными данными, выведенными из оперативного накопителя; однако ни в коем случае не требуется, чтобы колебательные данные запоминались в непосредственно доступной для представления форме и поэтому больше не требовали бы никакой переработки перед их фактическим представлением. Соответствующие меры в любом случае следует понимать, как включенные в процесс представления. С "представлением" связана также предварительная обработка колебательных данных для дальнейшего анализа, в частности, в рамках системы диагностики для раннего распознавания повреждений. Такая предварительная обработка может, в частности, заключаться в выборе колебательных данных по определенным критериям и в создании сигналов, которые символизируют определенные высказывания относительно колебательных данных.
В соответствующей изобретению мониторной системе производится обработка сенсорных импульсов и маркерных импульсов, которая особенно приспособлена к большому числу появляющихся в единицу времени таких сенсорных импульсов и маркерных импульсов, как они возникают при эксплуатационном контроле обычной турбомашины, как, например, паровой турбины низкого давления на электростанции. Рабочее колесо паровой турбины низкого давления на электростанции имеет обычно между 50 и 100 лопаток и при регулярной работе вращается со скоростью 1500, 1800, 3000 или 3600 оборотов в минуту, в зависимости от частоты сети токоснабжения, в которую электростанция подает энергию, и в зависимости от того, имеет ли включенный после паровой турбины генератор четыре или два вращающихся магнитных полюса. От каждого сенсора рабочего колеса соответственно получаются сенсорные импульсы с частотами порядка многих килогерц, что требует как очень быстрой обработки, так и особого вида и способа запоминания и оценки сенсорных импульсов или соответственно получаемых их этих сенсорных импульсов, характеризующих колебательные состояния лопаток колебательных данных.
Мониторной системой получаются колебательные данные относительно колебательных состояний лопаток за счет оценки временной последовательности импульсов, причем каждый импульс имеет временной ход, который в основном соответствует заданному стандарту. В соответствии с этим подходящим и предпочтительным является формировать из при известных обстоятельствах комплексных во временном прохождении импульсов, которые непосредственно снимаются с сенсора, сенсорные импульсы, которые соответствуют заранее выбираемому стандарту. Стандартами, которые при этом имеются в виду, являются, например, ТТЛ- и ЭСЛ- стандарты. Дальнейшая оценка сенсорных импульсов должна направляться, в частности, на их присваивание к отдельным лопаткам, которое определяют из временной связи с маркерными импульсами, и временные корреляции среди приданных лопатке турбины сенсорных импульсов. Из этих корреляций можно делать заключение о колебательном состоянии лопатки; колебательное состояние лопатки модулировано на соответствующие сенсорные импульсы по типу фазово-импульсной модуляции. Согласно этому для определения величин, которые непосредственно характеризуют колебательное состояние и в значительной степени независимы от вращающегося движения лопатки и обусловленного тем самым вида сенсорных импульсов, могут приниматься во внимание все возможные способы демодуляции сигнала, на который модулирована информация по типу фазово-импульсной модуляции.
Оперативный накопитель или другой, в частности приданный устройству представления накопитель, имеет предпочтительно такие параметры, что он при регулярной работе, то есть когда рабочее колесо обычно вращается с упомянутыми 1500, 1800, 3000 или 3600 оборотами в минуту, для временного промежутка больше 10 секунд, предпочтительно порядка 20 секунд может запоминать все появляющиеся колебательные данные. Особенно предпочтительным является накопитель всех колебательных данных, появляющихся во временной промежуток до одной минуты, причем выполнение такого накопителя, вероятно, может быть сделано зависимым от определенного критерия, например предупредительного сигнала, который должен выдаваться связанным с мониторной системой контрольным модулем. При регулярной работе в качестве достаточного рассматривается запоминание колебательных данных на протяжении временного промежутка порядка 20 секунд, причем в критическом рабочем состоянии предпочтительной является возможность для запоминания на протяжении более длинного временного промежутка, в частности, до одной минуты.
Предпочтительно сенсорное устройство содержит два приданных рабочему колесу и расположенных на расстоянии друг от друга по периметру рабочего колеса сенсора, и для каждой лопатки каждая дата колебаний вычисляется из временной разницы между приданным сенсорным сигналом от первого сенсора и приданным сенсорным сигналом от второго сенсора. Таким образом реализуется так называемое двухсенсорное измерительное устройство. Двухсенсорное измерительное устройство поставляет в качестве даты колебаний временную разницу, которая является суммой из постоянной составляющей, которая задана числом оборотов и диаметром рабочего колеса с лопатками и соответствует тангенциальному расстоянию между сенсорами, и значением, которое может только тогда отличаться от нуля, когда лопатка выполняет колебание. Разумеется, что не любое возможное колебание лопатки поставляет обнаружимый двухсенсорным измерительным устройством сигнал; однако колебания лопатки, которые происходят в направлении обращения рабочего колеса, являются обнаружимыми, по меньшей мере, тогда, когда их соответствующая частота не соответствует частоте вращения рабочего колеса или целочисленному кратному этой частоты вращения. Определяемое двухсенсорным измерительным методом выше определенное значение примерно соответствует пути, пройденному вершиной колеблющейся лопатки во вращающейся вместе с рабочим колесом системе отсчета между первым сенсором и вторым сенсором. От подробного представления оценки сенсорных импульсов в рамках двухсенсорного измерительного метода здесь отказываются и делается ссылка на уже упомянутую работу "Beruhrungsiose SchaufelschwingungsmeBtechnik".
В качестве сенсоров предпочтительно используются электромагнитные сенсоры. Такие электромагнитные сенсоры могут, например, встраиваться в корпусе турбомашины таким образом, что вершины всех лопаток на рабочем колесе одна за другой приближаются к сенсору до небольшого расстояния и снова удаляются, когда рабочее колесо вращается. Лопатка, вершина которой таким образом находится вблизи сенсора, изменяет магнитное поле, которое исходит от магнита в сенсоре и индуцирует таким образом электрический импульс в относящейся к сенсору катушке. Такой электрический импульс является естественно биполярным, так как в этом импульсе появляются одна за другой обе возможные электрические полярности. "Прохождение через нуль" импульса, то есть момент времени, в который меняется его полярность, является предпочтительным критерием для вызывания нормированного сенсорного импульса во включенном после сенсора датчике импульсов.
Оперативный накопитель предпочтительно имеет такие большие параметры, что он может запоминать все колебательные данные временного промежутка, в котором рабочее колесо выполняет, по меньшей мере, 100 оборотов. Таким образом обеспечивается, что имеющееся в распоряжении в оперативном накопителе множество данных всегда дает ясную и полную картину колебательных состояний контролируемых лопаток.
Мониторная система имеет предпочтительно дополненное контрольным модулем устройство оценки, причем контрольный модуль проверяет запомненные в оперативном накопителе колебательные данные, по меньшей мере, по одному критерию контроля и поставляет устройству представления соответствующий предупредительный сигнал, когда он находит колебательные данные, которые не удовлетворяют критерию контроля. Такой контрольный модуль служит, в частности, для того, чтобы распознать повышенные нагрузки лопаток за счет колебаний и делать это предпочтительно настолько своевременно, чтобы рабочее состояние лопаток могло быть изменено до того, как появляется ущерб. С особым преимуществом критерий контроля контрольного модуля сформулирован таким образом, что предупредительный сигнал генерируется уже до того, как появляются колебательные состояния, которые могут оказывать отрицательное воздействие на срок службы лопаток. Для случая, что перед возможностью изменения опасного колебательного состояния должна бы появляться нагрузка, которая оказывает отрицательное воздействие на срок службы лопатки, для каждой лопатки может быть определена и представлена потеря срока службы, при необходимости с дополнительными предупреждениями, если накопленные в течение времени потери срока службы суммируются в значение, которое опасно приближается к вообще предполагаемому сроку службы лопатки.
Реакция устройства представления на предупредительный сигнал от контрольного модуля происходит предпочтительно таким образом, что из оперативного накопителя выбирают множество колебательных данных под влиянием колебательных данных, которые не удовлетворяют критерию контроля и представляют предпочтительно вместе с предупреждением. При необходимости возможной является дополнительная оценка предупредительного сигнала и вызывающих его колебательных данных, прежде всего в связи с возможным использованием срока службы или соответственно равнозначно выражено приращением усталости лопатки, к которой относятся колебания. Подобная оценка может производиться как в устройстве оценки, так и в устройстве представления.
Выборка колебательных данных устройством представления осуществляется предпочтительно для временного промежутка более чем десять секунд, в частности порядка 20 секунд. Таким образом в распоряжении устройства представления на каждый предупредительный сигнал для представления и при необходимости дальнейшего анализа имеется большое количество данных, включая, по меньшей мере, значительные части "предыстории" и "конечного ракорда" вызывающего предупредительный сигнал колебательного состояния, что может поддерживать и углублять исследование колебательного состояния.
В качестве критериев контроля используются многообразные, в частности, также комплексные критерии. Так могут исследоваться прежде всего многочисленные, следующие во времени друг за другом колебательные данные в комбинированной форме, например в форме среднего значения таким образом, что нагрузка лопаток за счет колебаний усредняется на протяжении множества, предпочтительно большого числа оборотов рабочего колеса. Для проверки, имеет ли место опасное колебательное состояние, такое среднее значение может сравниваться с подходящим граничным значением. Для получения высказываний, которые относятся ко всему рабочему колесу или к большим сегментам рабочего колеса, могут совместно оцениваться колебательные данные всех лопаток или колебательные данные определенного множества лопаток. Само собой разумеется, что возможной является также проверка колебательных данных для каждой отдельной лопатки; производится она или нет, может быть при необходимости сделано зависимым от критериев контроля. Если в распоряжении имеются соответствующие сенсорные устройства, например сенсорное устройство с двухсенсорной измерительной системой, кроме обнаружения колебательного состояния одной отдельной лопатки, возможным является также обнаружение так называемого системного колебания, то есть колебания всей системы из рабочего колеса и лопаток. Также и для этого могут формулироваться подходящие критерии контроля. Приданные критериям контроля предупредительные сигналы и предупреждения могут быть сформулированы в соответствии с их значением; предупреждение в зависимости от значения соответствующего критерия контроля может иметь характер между простой констатацией и обязательным требованием сразу же прекратить ведущее к колебаниям рабочее состояние.
Мониторная система с особым преимуществом выполнена для представления колебательных состояний лопаток на нескольких рабочих колесах в одной турбомашине или в нескольких турбомашинах; в таком выполнении мониторная система позволяет производить полный контроль установки с турбомашиной, которая содержит лопатки, которые могли бы подвергаться опасности за счет колебаний. Такая мониторная система позволяет также предпочтительным образом, представлять колебательные состояния каждой лопатки на рабочем колесе ли соответственно на рабочих колесах.
Мониторная система любого выполнения является особенно пригодной для диагностики турбомашины, причем во время работы турбомашины колебательные данные от всех лопаток турбомашины имеются в распоряжении для представления в оперативном накопителе. Особенное значение это имеет для паровой турбины, в частности паровой турбины на насыщенном паре. В подобных паровых турбинах на насыщенном паре, которые, в частности, применяются в турбоагрегатах в качестве турбин низкого давления, лопатки являются относительно длинными и достигают в конечных каскадах длин порядка одного метра и больше. Для таких лопаток демпфирующие колебания навесные детали, как, например, лопаточный бандаж, больше не принимаются во внимание так, что на этих лопатках возникают колебания преимущественным образом и в большом объеме. Специально контроль таких лопаток имеет поэтому в рамках диагностики, которая предпочтительно относится ко всему турбоагрегату и всем установкам, которые соединены с турбоагрегатом, особенное значение.
Примеры выполнения мониторной системы поясняются ниже с помощью чертежей. При этом чертежи показывают:
фиг. 1 - рабочее колесо турбины с лопатками турбины и сенсорным устройством, а также устройство оценки с устройством представления;
фиг. 2 - устройство оценки с устройством представления для мониторной системы в рамках особой формы выполнения.
Фиг. 1 показывает часть турбомашины 3, в частности рабочее колесо 2, на котором закреплены лопатки 1 (символически показанные радиальными штрихами). Рабочее колесо 2 установлено с возможностью вращения с лопатками 1 вокруг оси 18 в направлении изогнутой стрелки. Для обнаружения колебательных состояний лопаток 1 турбомашина 3 снабжена сенсорным устройством, содержащим первый сенсор 4 и второй сенсор 5 (оба сенсора символически показаны черными точками), а также приданный этим сенсорам 4, 5 усилитель 6 и датчик импульсов 7. Когда рабочее колесо 2 вращается представленным образом, то каждая лопатка перемещается вначале мимо первого сенсора 4 и затем мимо второго сенсора 5. При полном обороте рабочего колеса 2 таким образом для каждой лопатки 1 получаются два сенсорных сигнала. Чтобы сделать возможным придание в соответствие сенсорных сигналов лопаткам 1, рабочее колесо 2 далее содержит марку 19, которая всегда остается в значительной степени не подверженной влиянию колебаний лопаток 1 или всей системы из лопаток 1 и рабочего колеса 2 и наблюдается маркерным датчиком 8. Всегда, когда марка 19 находится на заранее заданном месте, маркерный датчик 8 выдает маркерный импульс. Временное положение сенсорных импульсов относительно маркерных импульсов позволяет производить желаемое придание в соответствие сенсорных импульсов к отдельным лопаткам 1. Датчик импульсов 7, а также маркерный датчик 8 поставляют свои сенсорные или маркерные импульсы на устройство оценки 9. В этом устройстве оценки 9 сенсорные импульсы и маркерные импульсы вначале обрабатывают таким образом, что сенсорные импульсы придаются в соответствие тем лопаткам 1, от которых они происходят, и затем приданные таким образом в соответствие сенсорные импульсы преобразуются в колебательные данные, которые характеризуют колебательные состояния лопаток 1. Эти колебательные данные запоминаются в оперативном накопителе 13 в устройстве оценки 9 и имеются там в распоряжении для представления устройством представления 14, которое имеет доступ к оперативному накопителю 13. Представление колебательных данных может производиться на различных средствах отображения 15 и 16, в частности на экране электроннолучевой трубки 15 и/или на печатающем устройстве 16. Вид и способ представления колебательных состояний не подлежит никаким ограничениям. Представленное на фиг. 1 устройство с первым сенсором 4 и вторым сенсором 5 позволяет реализацию известного из цитированного уровня техники двухсенсорного измерительного метода, который является особенно успешным для обнаружения колебательных состояний.
Подробности обработки сенсорных импульсов и маркерных импульсов следуют из примера выполнения согласно фиг. 2. На этой фигуре главное внимание уделено представлению структур особенно предпочтительной формы выполнения устройства оценки 9, а также устройства представления 14. К устройству оценки 9 подводят от маркерного датчика 8, а также многочисленных датчиков импульсов 7 маркерные импульсы или соответственно сенсорные импульсы. Кроме того, эскизно показан аналоговый датчик 22, через который к устройству оценки 9 могут подводиться дальнейшие аналоговые измерительные данные о турбомашине, к которой подключено устройство оценки 9. Устройство оценки 9 выполнено модульным и содержит модуль придания в соответствие 10, к которому импульсные датчики 7 поставляют сенсорные импульсы, маркерный датчик 8 маркерные импульсы и аналоговый датчик 22 аналоговые измерительные данные. В модуле придания в соответствие 10 прежде всего производится придание в соответствие всех входящих импульсов и измерительных данных к отдельным лопаткам; затем эти импульсы и данные преобразуют в колебательные данные, которые приспособлены для дальнейшей, предпочтительно цифровой обработки. Это преобразование включает, в частности, для каждой лопатки демодуляцию соответствующей последовательности сенсорных импульсов, модулированной колебаниями лопатки по типу фазово-импульсной модуляции. Модуль придания в соответствие 10 поставляет колебательные данные к накопительному модулю 12, который имеет доступ к оперативному накопителю 13 и запоминает колебательные данные в этом оперативном накопителе 13. Запоминание происходит таким образом, что оперативный накопитель 13 работает как сдвиговый регистр; вследствие естественной конечной накопительной емкости оперативного накопителя 13 при поступлении нового комплекта колебательных данных самый старый комплект колебательных данных стирается и переписывается вторым по старости комплектом и так далее, пока, наконец, место самого молодого запомненного комплекта колебательных данных будет иметься в распоряжении для запоминания нового комплекта.
С оперативным накопителем 13 взаимодействует уже упомянутое устройство представления 14, которое в основном имеет любой доступ к оперативному накопителю 13 и может по заданию выбирать из него колебательные данные и представлять на средстве отображения 15 и 16. Кроме того, оперативный накопитель 13 сообщается с контрольным модулем 17, который проверяет запомненные колебательные данные по одному критерию контроля или нескольким критериям контроля и поставляет устройству представления 14 предупредительные сигналы, если определены колебательные данные, которые не удовлетворяют критерию контроля. Таким образом с помощью контрольного модуля 17 становится возможным постоянный контроль лопаток относительно колебаний, в частности опасных колебаний, и освоен метод представления колебательных состояний лопаток для постоянной диагностики. Дальнейшая обработка предупредительных сигналов подлежит устройству представления 14; по предупредительному сигналу могут прежде всего представляться определенные контрольным модулем 17 колебательные состояния и при необходимости получаться соответствующие предупреждения.
Модуль придания в соответствие 10 является со своей стороны структурированным и содержит сортировочный подмодуль 20, который предпринимает уже упомянутое придание в соответствие сенсорных импульсов с лопатками, и вычислительный подмодуль 11, который нагружается данными из сортировочного подмодуля 20 и обеспечивает всевозможные необходимые преобразования сенсорных импульсов и подготовку в приспособленной к дальнейшей обработке форме. Следует упомянуть, что такое расположение сортировочного подмодуля 20 и вычислительного подмодуля не является ни в коей мере обязательным и может быть реализовано без всяких проблем в обратной последовательности. В этой связи следует еще раз указать на то, что форматы и значения колебательных данных, которые создаются в устройстве оценки 9 и обрабатываются и ставятся в распоряжение устройства представления 14, ни в коей мере не должны быть доступными для непосредственной интерпретации того, кто работает с мониторной системой; предварительное преобразование колебательных данных в непосредственно доступную для человеческого понимания форму может в зависимости от выполнения мониторной системы в конце концов оставаться предоставленной устройству представления 14.
Мониторная система позволяет производить диагностику турбомашины с учетом колебательных состояний лопаток в турбомашине. Она может вносить важный вклад с учетом постоянного контроля турбомашины и своевременного распознавания возможных отрицательных воздействий, за счет чего может достигаться значительный выигрыш в надежности работы и повышенная гибкость в эксплуатации.

Изобретение относится к области диагностики турбомашин. Мониторная система содержит приданный рабочему колесу сенсор, соединенный с относящимся к нему датчиком импульсов. Последний поставляет сенсорные импульсы, маркирующие момент времени, в который лопатка проходит мимо сенсора. Имеется маркерный датчик, вырабатывающий маркерный импульс, когда рабочее колесо находится в определенном нулевом положении. В устройство оценки входят модуль приведения в соответствие, который приводит в соответствие каждый сенсорный импульс с учетом маркерных импульсов к вызвавшей его лопатке и преобразует сенсорные импульсы каждой лопатки в колебательные данные, характеризующие колебательное состояние лопатки. Накопительный модуль имеет доступ к оперативному накопителю, который запоминает для каждой лопатки множество полученных колебательных данных, перезапоминает или переписывает запомненные данные при получении новых. Устройство представления осуществляет выборку данных из оперативного накопителя. Данная система способна за счет постоянного представления колебательных состояний отображать повышенную нагрузку лопаток. 12 з.п. ф-лы, 2 ил.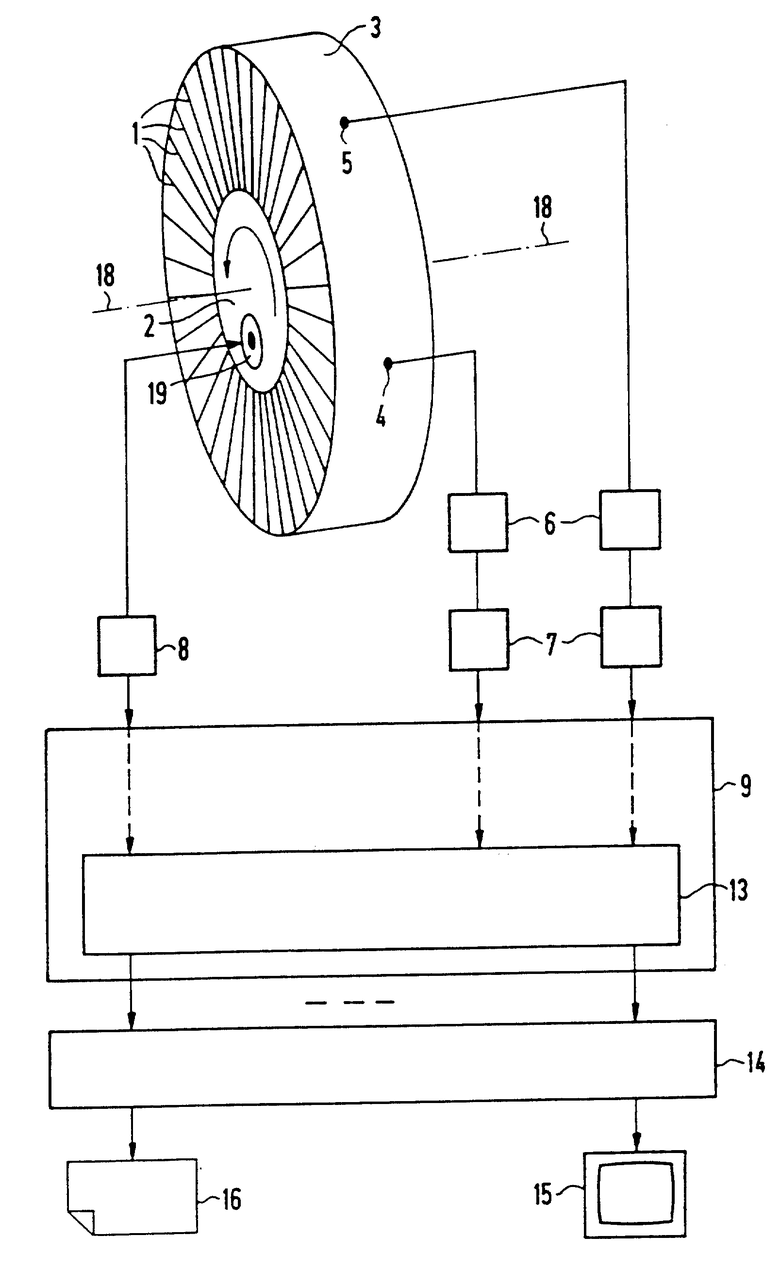
| US 4934192 A, 19.06.90 | |||
| Устройство для разделения приемных и передающих каналов при работе на две антенны | 1970 |
|
SU327865A1 |

