Изобретение относится к области диагностирования турбомашин и может быть использовано для сигнализации предаварийного состояния лопаточного аппарата турбин при появлении признаков усталости материала или дефектов лопаток.
Известна мониторная система для представления колебательных состояний множества лопаток на вращающемся рабочем колесе [1] (патент РФ №2125247, МКИ G 01 Н 1/00; G 07 С 3/00, опубликованная 20.01.1999, Бюл. №2), содержащая приданный рабочему колесу сенсор, соединенный с относящимся к нему датчиком импульсов, который поставляет сенсорные импульсы, маркирующие момент времени, в который лопатка проходит мимо сенсора. Имеется также маркерный датчик, вырабатывающий маркерный импульс, когда колесо находится в определенном нулевом положении и устройство оценки, в которое входит модуль приведения в соответствие каждого сенсорного импульса с учетом маркерных импульсов к вызвавшей его лопатке и преобразует поток сенсорных импульсов от каждой лопатки в данные, характеризующие колебательное состояние лопатки. В состав системы входит накопительный модуль, связанный с работающим по циклу оперативным накопителем, который запоминает фрагменты полученных данных, а устройство представления осуществляет выборку данных из оперативного накопителя.
Известная система имеет недостаток, заключающийся в том, что введение маркерного датчика, вырабатывающего одиночный маркерный импульс за каждый оборот ротора, с целью приведения в соответствие каждого сенсорного импульса, генерируемого датчиком импульсов, вызвавшей его лопатке рабочего колеса турбины, не допускает измерения колебаний лопаточного венца турбомашины относительно ротора, а значит, и неоднородности, вызванной динамическими деформациями лопаток.
Известен сигнализатор предаварийных деформаций лопаток турбомашин [2] (патент РФ №2177145, МКИ G 01 Н 1/08, опубликованный 20.12.2001 года, Бюл. №35), содержащий бесконтактный импульсный датчик, установленный в корпусе турбомашины, над траекторией движения периферийных торцов лопаток, схему сравнения, формирователь прямоугольных импульсов, генератор тактовых импульсов, блок управления, преобразователь временных интервалов в код, сумматор цифровых кодов, делитель суммарного кода на фиксированное число, соответствующее количеству лопаток в колесе турбины, блок вычисления разности, формирователь предаварийного кода, соответствующего предаварийному уровню деформаций лопаток.
Недостатком данного устройства является то, что измеряемыми являются совместные колебания ротора и лопаточного венца турбомашины, не характеризующие однозначно неоднородность колебаний, вызванную динамическими деформациями самих лопаток. Так, в отсутствие какой-либо неоднородности лопаточного аппарата возбуждение крутильных колебаний самого ротора, на который посажена турбина, приведут к ложному заключению о появлении такой неоднородности. Причиной таких угловых колебаний ротора могут быть возбуждения одной из крутильных резонансных форм, задевания в кинематической паре ротор - статор, неравномерность потока газа через турбину и т.п.
В соответствии с этим задачей настоящего изобретения является повышение точности и достоверности измерения и мониторинга вибраций, определяющих техническое состояние материальной части лопаточного аппарата относительных (по отношению к ротору) колебаний лопаток в плоскости вращения, вызываемых их динамическими деформациями, с последующим диагностированием текущего технического состояния как каждой лопатки, так и лопаточного аппарата в целом.
Для достижения поставленной задачи в способе мониторинга вибрационного состояния множества лопаток на вращающемся рабочем колесе машины, в плоскости вращения лопаточного аппарата машины измеряют угловое положение вала с помощью бесконтактного импульсного реперного датчика (ИРД) углового положения вала, вырабатывающего один импульс при каждом повороте вала на угол 2 π /n радиан, где n - число лопаток рабочего колеса, одновременно измеряют угловые положения периферийных торцов каждой из лопаток в плоскости вращения с помощью m бесконтактных импульсных маркерных датчиков (ИМД), расположенных на корпусе по периметру лопаточного аппарата над внешними торцами лопаток с угловым шагом 2 π /m радиан, а текущие значения относительных угловых колебаний ϕ j каждой конкретной j-той лопатки определяют по текущим значениям временного интервала τ между соседними импульсами, генерируемыми ИРД, и временного сдвига θ j между поставленными в соответствие парами импульсов от ИРД и импульсами (последовательно по ходу вращения вала) от m - штук ИМД по формуле
ϕ j=(2 π /n· τ )· θ j,
а система мониторинга вибрационного состояния и аварийной защиты лопаточных аппаратов роторных машин содержит бесконтактные импульсные маркерные датчики (ИМД) углового положения периферийных торцов лопаток, маркирующие моменты времени прохождения торцом лопатки рабочей зоны чувствительных элементов этих датчиков, размещенные симметрично по периметру корпуса лопаточного аппарата над траекторией вращения периферийных торцов лопаток с угловым шагом 2 π /m радиан, где m - количество устанавливаемых ИМД, которым определяется частотный диапазон 0…fmax измерения колебаний лопаток, где fmax=fp·m/2, fp - частота вращения ротора; соединенный с выходом ИРД усилитель сигнала, нагруженный на формирующие устройства, генерирующие стандартные прямоугольные реперные импульсы-отметчики "нулевого" и текущего углового положения вала, а с выходами ИМД -усилители сигналов, соединенные с формирующими устройствами-генераторами стандартных прямоугольных маркерных импульсов углового положения периферийных торцов лопаток, блок-идентификатор лопаток на рабочем колесе, в свою очередь соединенный с модулем приведения в соответствие импульсов от ИРД и импульсов от ИМД, последовательно возбуждаемых (по ходу вращения вала) торцом каждой лопатки в чувствительных элементах ИМД, высокочастотный генератор стандартных тактовых импульсов, модуль-измеритель текущих значений временного интервала между соседними импульсами от ИРД по сигналу от генератора стандартных прямоугольных реперных импульсов от ИРД и сигналу от высокочастотного генератора стандартных тактовых импульсов, модуль-измеритель текущих значений временного сдвига между поставленными в соответствие с парами стандартных прямоугольных реперных импульсов от ИРД и маркерных импульсов от ИМД, по сигналу от высокочастотного генератора стандартных тактовых импульсов, соединенные с блоком преобразования выходных сигналов от этих модулей в коды, модуль-вычислитель текущих значений относительных угловых колебаний каждой лопатки рабочего колеса относительно вращающегося вала по сформированным кодовым сигналам временного интервала и временного сдвига, модуль-измеритель текущих значений признаков динамической активности лопаток рабочего колеса по их относительным угловым колебаниям, нагруженный на блок формирования команд аварийной защиты оборудования, блок отображения информации о текущем вибрационном поведении лопаток, импульсный реперный датчик текущего углового положения вала, располагаемый на корпусе над торцами лопаток рабочего колеса, импульсные маркерные датчики, размещенные симметрично по периметру корпуса лопаточного аппарата над траекторией вращения периферийных торцов лопаток, модуль приведения в ходе эксперимента в соответствие импульсов от ИРД и импульсов от ИМД, возбуждаемых последовательно (по ходу вращения вала) торцом каждой конкретной лопатки рабочего колеса в чувствительных элементах датчиков; модуль-измеритель текущих значений временного интервала между соседними импульсами от ИРД и модуль-измеритель текущих значений временного сдвига между поставленными в соответствие парами импульсов от ИРД и импульсов от ИМД, модуль-вычислитель относительных угловых колебаний каждой лопатки рабочего колеса и связанный с ним модуль-измеритель текущих значений признаков относительной (по отношению к вращающемуся валу) динамической активности лопаток.
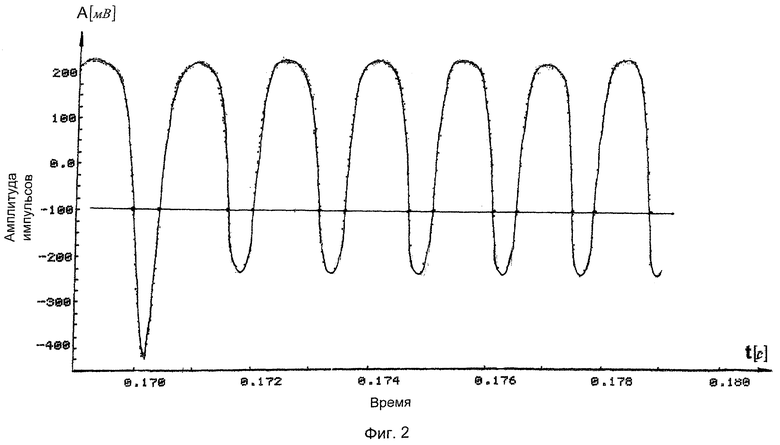
На фиг.1 приведена функциональная схема предлагаемой системы для осуществления способа, на которой изображены: вал 1 с закрепленными на нем рабочим колесом с лопаточным аппаратом 2, расположенным в корпусе 3 с установленными на нем по внешнему периметру лопаточного аппарата 2 бесконтактными маркерными импульсными датчиками (ИМД) 4, 5, 6, 7, импульсный реперный датчик (ИРД) 8, 9, 10, 11, конструктивно включающий зубчатое колесо 8 с зубчатым венцом 9, реперную метку 11 "нулевого" углового положения вала и чувствительный элемент 10, усилители импульсных сигналов 12, 15, 16, 17, 18, формирующее устройство-генератор импульсов-отметчиков 13 "нулевого" положения вала 1, формирующее устройство 14, генерирующее реперные импульсы углового положения вала, формирующие устройства-генераторы маркерных импульсов 19, 20, 21, 22 угловых положений периферийных торцов лопаток, блок-идентификатор 23 лопаток, модуль 24 приведения в соответствие импульсов от ИМД и импульсов от ИРД, модуль-измеритель 25 временных интервалов между соседними импульсами от ИРД, модуль-измеритель 26 временных сдвигов между поставленными в соответствие импульсами от ИРД и ИМД, высокочастотный генератор 27 стандартных тактовых импульсов, блок преобразования 28 измеренных временных интервалов в коды, модуль-вычислитель 29 относительных угловых колебаний каждой лопатки рабочего колеса 2, модуль-измеритель 30 признаков относительной (по отношению к вращающемуся валу) динамической активности лопаток, блок 31 формирования команд аварийной защиты машины, блок 32 отображения информации о текущем техническом состоянии лопаточного аппарата 2.
Для решения поставленной задачи измеряют угловое положение вала с помощью бесконтактного чувствительного элемента 10 импульсного реперного датчика (ИРД) углового положения вала 1, вырабатывающего один импульс при каждом повороте вала 1 на угол 2 π /n радиан, где n - число лопаток рабочего колеса 2. Для маркировки импульса, соответствующего принятому “нулевому” угловому положению вала, на зубчатом венце 9 зубчатого колеса 8 механическим способом формируется реперная метка 11 (например, путем создания более глубокого паза между одной из пар соседних зубьев). С помощью установленных на корпусе 3 по периметру лопаточного аппарата 2 (над внешними торцами лопаток) бесконтактных импульсных маркерных датчиков ИМД 4, 5, 6, 7, размещаемых с угловым шагом 2 π /m радиан, где m - количество используемых ИМД, измеряют текущие угловые положения периферийных торцов лопаток путем формирования одного импульса при каждом повороте торца каждой лопатки на угол 2 π /m радиан, а текущие значения относительных угловых колебаний ϕ j каждой конкретной j-той лопатки определяют по текущим значениям временного интервала τ между соседними импульсами, генерируемыми ИРД, и временного сдвига θ j между поставленными в соответствие парами импульсов от ИРД и импульсами (последовательно по ходу вращения вала) от m - штук ИМД по формуле: ϕ j-=(2 π /n· τ )· θ j.
Решение поставленной задачи в предлагаемой мониторинговой системе состояния и аварийной защиты лопаток достигается тем, что эта система, в отличие от известной, дополнительно включает в себя вспомогательный бесконтактный импульсный реперный датчик (ИРД) углового положения вала, конструктивно сформированный из элементов 8, 9, 10, 11, вырабатывающий один маркерный импульс при каждом повороте вала на угол 2 π /n радиан, где n - число лопаток контролируемого лопаточного аппарата машины, а также основные импульсные маркерные датчики (ИМД) 4, 5, 6, 7, маркирующие моменты времени прохождения торцами лопаток рабочей зоны чувствительных элементов этих датчиков, обязательным условием размещения которых является их симметричное расположение по периметру корпуса 3 лопаточного аппарата над траекторией вращения периферийных торцов лопаток с угловым шагом 2 π /m радиан, где m - количество устанавливаемых ИМД (числом m определяется частотный диапазон 0....fmax измерения колебаний лопаток, где fmах=fр·m/2, fр - частота вращения ротора. Кроме того, система содержит модуль 24 приведения в ходе эксперимента в соответствие импульсов от ИРД и импульсов от ИМД, возбуждаемых последовательно (по ходу вращения вала) торцом каждой конкретной лопатки 2 рабочего колеса в датчиках 4, 5, 6, 7; модуль-измеритель 25 текущих значений временного интервала между соседними импульсами от ИРД и модуль-измеритель 26 текущих значений временного сдвига между поставленными в соответствие в модуле 24 парами импульсов от ИРД и импульсов от ИМД 4, 5, 6, 7. Соответствие устанавливается в ходе работы роторной машины по признаку минимального по величине временного опережения или запаздывания импульса от ИМД по отношению к импульсу от ИРД. Дополнительно в систему введен модуль-вычислитель 29 относительных угловых колебаний каждой лопатки рабочего колеса 2 и связанный с ним модуль-измеритель 30 текущих значений признаков относительной (по отношению к валу) динамической активности лопаток.
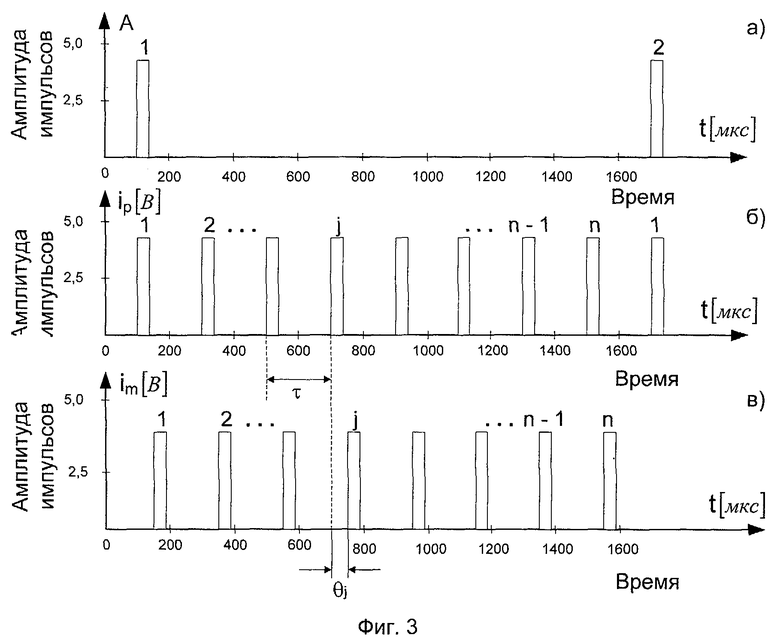
Способ и система осуществляются и функционируют следующим образом. При вращении вала 1 чувствительный элемент 10 ИРД, например токовихревого типа, генерирует последовательность аналоговых импульсов в количестве n за один оборот вала, где n - число лопаток рабочего колеса 2 роторной машины. Фрагмент аналогового сигнала на выходе чувствительного элемента 10 ИРД представлен на фиг.2, где импульс-маркер “нулевого” положения вала 1 имеет явный отличительный признак - провал по напряжению по сравнению с импульсами, соответствующими последовательным поворотам вала на угол 2π /n радиан.
Аналогично при вращении вала 1 установленные по периметру корпуса 3 лопаточного аппарата m - штук ИМД (на фиг.1 для определенности показан вариант m=4 установки 4-х датчиков 4, 5, 6, 7) также генерируют последовательности из n импульсов за каждый оборот вала 1. Каждая такая последовательность импульсов маркирует моменты времени прохождения торцами лопаток рабочего колеса зоны чувствительных элементов ИМД. Далее импульсные сигналы от чувствительного элемента ИРД 10 подаются на вход усилителя 12, а от чувствительных элементов ИМД 4, 5, 6, 7 соответственно на входы усилителей 15, 16, 17, 18. Сигнал с выхода усилителя 12 подается на два формирующих устройства: устройство 13, формирующее стандартные прямоугольные импульсы, соответствующие “нулевому” положению вала 1, и устройство 14, генерирующее стандартные прямоугольные импульсы, соответствующие последовательным поворотам вала 1 на угол 27 π /n радиан. Аналогично сигналы с выходов усилителей 15, 16, 17, 18 подаются соответственно на входы формирующих устройств 19, 20, 21, 22, генерирующих стандартные прямоугольные импульсы, соответствующие последовательным поворотам торцов лопаток 2 рабочего колеса на угол 2 π /n радиан. Все формирующие устройства 13, 14, 19, 20, 21, 22, представляющие собой одну из разновидностей аналогового компаратора, генерируют прямоугольные импульсы таким образом, чтобы их передние фронты соответствовали максимальным значениям градиентов импульсных сигналов на выходе усилителей 12, 15, 16, 17, 18. Признаком для формирования в устройстве 13 импульса, маркирующего “нулевое” положение вала, является амплитудное значение соответствующего импульса на выходе усилителя 12.
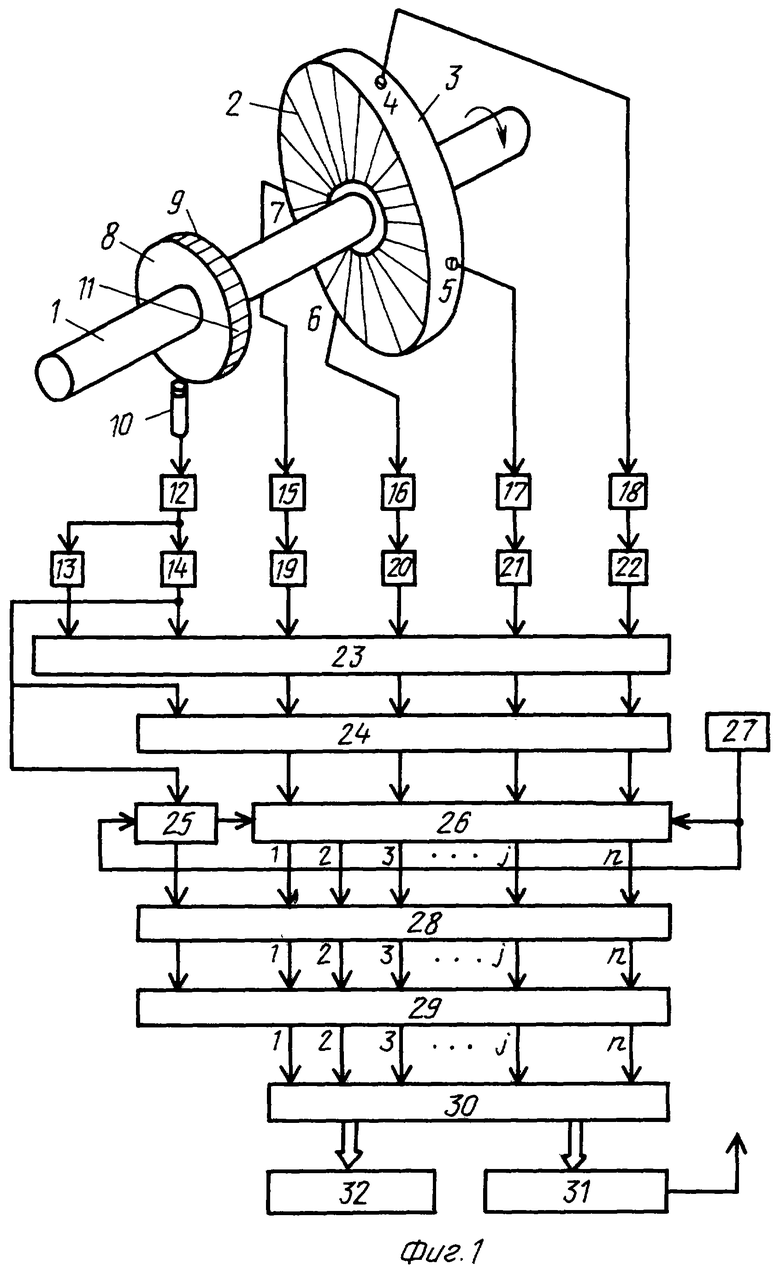
На фиг.3 представлены стандартные прямоугольные импульсы на выходах формирующих устройств 13 (фиг.3-а), 14 (фиг.3-б) и формирующего устройства, соответствующего одному из ИМД (фиг.3-в). При этом передние фронты каждого из стандартных прямоугольных импульсов соответствуют моменту времени достижения максимума градиентом нарастания соответствующего аналогового импульса на выходах ИРД и ИМД. Далее выходные сигналы формирующих устройств 13, 14, 19, 20, 21, 22 подаются на входы блока-идентификатора 23 лопаток рабочего колеса. При известных моментах времени прохождения валом своего “нулевого” положения, определяемых соответствующими импульсами-маркерами от формирующего устройства 13, идентификация лопаток осуществляется на каждом повороте вала автоматически в ходе эксперимента последовательной нумерацией лопаток, где первая лопатка - ближайшая к “нулевому” положению вала, по ходу его вращения, а последняя – ближайшая к “нулевому” положению вала против хода его вращения. На выходах блока 23 присутствуют те же импульсные сигналы, что и на выходах 19, 20, 21, 22, но с дополнительной индексацией импульсов, определяющей привязку их к соответствующим торцам лопаток. Эти сигналы одновременно с реперными импульсами от блока 14 подаются на входы модуля 24 автоматически в ходе эксперимента, устанавливающего и подтверждающего соответствие между импульсами от ИРД и маркированными импульсами от каждого из ИМД по следующему признаку: импульсу от ИРД соответствует импульс от выделенного ИМД, если разделяющий их временной интервал наименьший по сравнению с другими импульсами от ИМД.
На выходах модуля приведения 24 все импульсы от каждого ИМД маркируются по соответствию импульсам от ИРД. Далее на входы модуля измерителя 25 подаются реперный импульсный сигнал от формирующего устройства 14 и стандартные тактовые импульсы от высокочастотного генератора 27. В модуле 25 определяются и маркируются моменты времени поступления передних фронтов импульсов от модуля 14. Полученная информация далее подается на один из входов модуля-измерителя 26. Наряду с этим в модуле-измерителе 25 определяются текущие значения временного интервала τ между соседними реперными импульсами от ИРД. На входы модуля-измерителя 26, кроме упомянутого выше сигнала от модуля-измерителя 25, подаются сигналы от модуля 24, по которым в модуле-измерителе 25 определяются текущие значения временных сдвигов θ j для каждой j-той лопатки между поставленными в соответствие парами импульсов от ИРД и каждого ИМД. Выходные сигналы от модулей-измерителей 25 и 26 подаются на входы блока 28 преобразования текущих значений τ и θ j в коды, которые, в свою очередь, подаются на входы модуля-вычислителя 29 текущих значений относительного углового положения каждой j-той лопатки (1≤ j≤ n) рабочего колеса по формуле
ϕ j=(2 π /n· τ )· θ j радиан.
Оцифрованные данные с выхода модуля-вычислителя 29 подаются на входы модуля-измерителя 30 текущих значений признаков динамической активности как каждой лопатки, так и в целом лопаточного аппарата. В качестве таких признаков могут быть приняты среднеквадратичные значения относительных угловых колебаний ϕ j, “pic to pic” ϕ j, максимальное отклонение ϕ j от среднего значения и т.п. Далее текущие значения принятых признаков динамической активности лопаточного аппарата с выхода модуля 30 подаются в блок формирования команд аварийной защиты 31 роторной машины по признаку технического состояния ее лопаточного аппарата, а также в блок 32 отображения информации о текущем состоянии лопаточного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДЫ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2341781C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152590C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСКРУТКИ И АМПЛИТУДЫ КРУТИЛЬНОЙ СОСТАВЛЯЮЩЕЙ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337330C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ВАЛОВ РОТОРНЫХ МАШИН, ПЕРЕДАЮЩИХ КРУТИЛЬНЫЕ НАГРУЗКИ | 2002 |
|
RU2239803C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ПОВРЕЖДЕНИЙ И ДЕФЕКТОВ РАБОЧИХ ЛОПАТОК ТУРБОМАШИН | 2006 |
|
RU2326362C1 |
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА ЛОПАТОЧНОГО КОЛЕСА АВИАЦИОННОГО ДВИГАТЕЛЯ ПОСРЕДСТВОМ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ РАВНОВЕСИЯ | 2015 |
|
RU2686654C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584723C1 |
| МОНИТОРНАЯ СИСТЕМА ДЛЯ ПРЕДСТАВЛЕНИЯ КОЛЕБАТЕЛЬНЫХ СОСТОЯНИЙ МНОЖЕСТВА ЛОПАТОК НА ВРАЩАЮЩЕМСЯ РАБОЧЕМ КОЛЕСЕ | 1994 |
|
RU2125247C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2207523C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2258902C2 |
Изобретение относится к области диагностирования турбомашин и может быть использовано для сигнализации предаварийного состояния лопаточного аппарата турбин при появлении признаков усталости материала или дефектов лопаток. Задачей изобретения является повышение точности и достоверности измерения и мониторинга, определяющих техническое состояние материальной части лопаточного аппарата относительных (по отношению к ротору) колебаний лопаток в плоскости вращения, вызываемых их динамическими деформациями, с последующим диагностированием текущего технического состояния как каждой лопатки, так и лопаточного аппарата в целом. Способ мониторинга вибрационного состояния множества лопаток на вращающемся рабочем колесе машины заключается в том, что в плоскости вращения лопаточного аппарата машины измеряют угловое положение вала с помощью бесконтактного импульсного реперного датчика (ИРД) углового положения вала, вырабатывающего один импульс при каждом повороте вала на угол 2 π/n радиан, где n - число лопаток рабочего колеса, одновременно измеряют угловые положения периферийных торцов каждой из лопаток в плоскости вращения с помощью m бесконтактных импульсных маркерных датчиков (ИМД), расположенных на корпусе по периметру лопаточного аппарата над внешними торцами лопаток с угловым шагом 2 π/m радиан, а текущие значения относительных угловых колебаний ϕj каждой конкретной j-той лопатки определяют по текущим значениям временного интервала τ между соседними импульсами, генерируемыми ИРД, и временного сдвига θj между поставленными в соответствие парами импульсов от ИРД и импульсами (последовательно по ходу вращения вала) от m - штук ИМД по формуле ϕj=(2π/n·τ)·θj. Описана также система мониторинга вибрационного состояния и аварийной защиты лопаточных аппаратов роторных машин. 2 с.п. ф-лы, 3 ил.
ϕ j=(2 π /n· τ )· θ j.
| МОНИТОРНАЯ СИСТЕМА ДЛЯ ПРЕДСТАВЛЕНИЯ КОЛЕБАТЕЛЬНЫХ СОСТОЯНИЙ МНОЖЕСТВА ЛОПАТОК НА ВРАЩАЮЩЕМСЯ РАБОЧЕМ КОЛЕСЕ | 1994 |
|
RU2125247C1 |
| СИГНАЛИЗАТОР ПРЕДАВАРИЙНЫХ ДЕФОРМАЦИЙ ЛОПАТОК ТУРБОМАШИН | 2000 |
|
RU2177145C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПОВРЕЖДЕНИЙ РАБОЧИХ ЛОПАТОК ТУРБОМАШИНЫ | 1997 |
|
RU2133951C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЦЕЛОСТНОСТИ ЛОПАТОК РОТОРА ТУРБИНЫ | 1997 |
|
RU2131598C1 |
| US 4934192 A, 19.06.1996 | |||
| Устройство для разделения приемных и передающих каналов при работе на две антенны | 1970 |
|
SU327865A1 |

