Изобретение относится к устройству ограничительной части пункта 1 формулы изобретения, используемому на транспорте.
Устройства подсчета осей, независимо от примененной техники, работают по принципу, что ограниченный точками регистрации колес участок пути сигнализируется в качестве свободного только тогда, когда число въехавших на участок осей равно числу выехавших из участка осей. Чтобы можно было это устанавливать, должно определяться как число, так и направление прохождения осей во всех ограничивающих подлежащей сигнализации как свободный участок пути точках регистрации колеса. Для этого применяются работающие по различным физическим принципам детекторы колеса, из которых для каждой точки регистрации колеса по меньшей мере две расположены на определенном расстоянии друг от друга вдоль рельсового пути. Эти детекторы колеса при прохождении каждого колеса единицы подвижного состава выдают два перекрывающихся во времени импульса колеса на устройство оценки, которое преобразует соответственно связанные друг с другом импульсы колеса в зависящие от направления движения импульсы подсчета осей. Это устройство оценки может быть выполнено в различной технике; в последнее время для этого используют микрокомпьютеры. Подобное происходит также при контроле скорости, только здесь из временного смещения попарно связанных друг с другом импульсов колеса получают сообщения о скорости движения проходящего колеса единицы подвижного состава.
Из уровня техники известно устройство для регистрации предпочтительно скоростных железнодорожных колес, содержащее детекторы колеса, предназначенные для формирования при прохождении железнодорожного колеса сигналов колеса, расположенные по два в каждой точке регистрации на расстоянии друг от друга в направлении движения, и подключенные к n входным промежуточным накопителям, и средство оценки сигналов колеса, поступающих с входных промежуточных накопителей, последовательно опрашиваемых упомянутым средством оценки, выполненным с возможностью определения изменения содержания входных промежуточных накопителей (заявка DE N 3431171, B 61 L 1/16).
Недостатком известного устройства является то, что в зависимости от примененной техники как детекторов колеса, так и устройства оценки можно надежно распознавать и оценивать колеса подвижного состава только до определенной максимальной скорости движения. Граница однозначного распознавания колесных осей является зависимой от временного смещения сигналов колеса на детекторах колеса при максимальной скорости движения единицы подвижного состава и скорости обработки сигналов колеса в устройстве оценки. При быстрых последовательностях импульсов колес и тактовой частоте <3 МГц используемый для подсчета осей относительно медленный микрокомпьютер не может давать достоверной обработки в автономном режиме, в частности, тогда, когда за счет программного обеспечения должны производиться еще требующие много времени проверки на достоверность поступившей информации колеса.
До сих пор это старались преодолеть тем, что сигналы колеса во включенном перед собственно устройством оценки техническом обеспечении предварительно обрабатывали, запоминали и периодически опрашивали процессором устройства оценки. За счет этой предварительной обработки получаются довольно высокие затраты на техническое обеспечение, так как она должна иметь место отдельно для каждой точки регистрации колеса.
Задачей изобретения является создание устройства согласно ограничительной части пункта 1 формулы изобретения, которое позволяет перерабатывать быстрые последовательности импульсов с относительно медленным устройством оценки, без необходимости для этого для каждого детектора колеса особой предварительной обработки в сложном техническом обеспечении.
Поставленная задача решается тем, что в устройстве для регистрации предпочтительно скоростных железнодорожных колес, содержащем детекторы колеса, предназначенные для формирования при прохождении железнодорожного колеса сигналов колеса, расположенные по два в каждой точке регистрации на расстоянии друг от друга в направлении движения и подключенные к n входным промежуточным накопителям, и средство оценки сигналов колеса, поступающих с входных промежуточных накопителей, последовательно опрашиваемых упомянутым средством оценки, выполненным с возможностью определения изменения содержания входных промежуточных накопителей, согласно изобретению входные промежуточные накопители выполнены с возможностью попеременной активации их соответствующими сигналами активации, продолжительность периода которых меньше минимального временного смещения сигналов колеса при максимальной скорости движения, а в качестве средства оценки использован по меньшей мере один микрокомпьютер, управляемый сигналами прерывания, частота которых в n раз меньше частоты сигналов активации и запрограммированный с возможностью опроса входных промежуточных накопителей в последовательности их активации и сравнения их содержания с содержанием собственного входного накопителя во время прерывания, и с возможностью приема соответствующего актуального сообщения в случае выявления изменения содержания входного промежуточного накопителя по сравнению с содержанием собственного входного накопителя до начала прерывания с указанием времени приема соответствующего сообщения в указанный входной промежуточный накопитель.
Целесообразно, чтобы в устройстве согласно изобретению был предусмотрен счетчик времени, выполненный с возможностью соответствия позиции счета промежутку времени, прошедшему после последнего изменения массива данных входного накопителя, и с возможностью последовательного пошагового переключения по каждому сигналу прерывания, а по меньшей мере один микрокомпьютер был запрограммирован с возможностью, при распознавании события проезда, запроса мгновенного значения счета счетчика времени и, с учетом того, какой входной промежуточный накопитель зарегистрировал указанное событие, фиксации результата счета непосредственно или, уменьшая его на один шаг, вместе с сообщением о событии проезда в указанном входном накопителе.
Предпочтительно, чтобы в устройстве согласно изобретению микрокомпьютер был запрограммирован с возможностью установки счетчика времени с распознаванием и запоминанием того сообщения о событии, в отношении которого должно определяться временное расстояние следующего сообщения о событии, в исходное состояние и с возможностью, для случая поступления к этому времени из другого входного промежуточного накопителя актуального сообщения о событии, придания этому сообщению временного значения 01.
Целесообразно, чтобы в устройстве согласно изобретению был предусмотрен по меньшей мере один управляемый тактом обработки данных по меньшей мере одного микрокомпьютера таймер, выполненный с возможностью формирования делением упомянутого такта сигналов прерывания, подаваемых в качестве сигналов управления на входные промежуточные накопители, причем из каждых двух упомянутых накопителей один был выполнен с возможностью активации положительным фронтом сигнала, а другой - отрицательным.
Предпочтительно, чтобы в устройстве согласно изобретению по меньшей мере один микрокомпьютер был выполнен с емкостью входного накопителя, достаточной для запоминания данных, поступающих при кратковременном скоплении множества плотно следующих друг за другом колес единиц подвижного состава.
Целесообразно, чтобы в устройстве согласно изобретению входные промежуточные накопители и входной накопитель микрокомпьютера были выполнены с возможностью одновременного приема сигналов множества детекторов колеса.
Выгодно, чтобы в устройстве согласно изобретению был предусмотрен модуль управления и диагностики, выполненный с возможностью попеременного считывания из входных промежуточных накопителей синхронно с сигналами активации информации о всех запомненных ими для отдельных моментов времени опроса событиях проезда соответствующих точек регистрации и передачи полученных при этом данных с указанием соответствующих детекторов колес.
Предпочтительно, чтобы в устройстве согласно изобретению были предусмотрены по меньшей мере два микрокомпьютера для отдельного приема сигналов колеса и для раздельной обработки сигналов колеса с текущим или управляемым событием сравнением шагов обработки или результатов обработки.
Изобретение поясняется ниже более подробно с помощью представленных на фигурах примеров выполнения.
На фиг. 1 показано схематическое представление соответствующего изобретению устройства; на фиг. 2 - детальная диаграмма для пояснения его принципа действия.
Фиг. 1 показывает микрокомпьютер МС, который предусмотрен для того, чтобы преобразовывать сигналы колеса от детекторов колеса RD1-RD8 в зависящие от направления движения счетные импульсы и подводить их к не представленным счетчикам для сообщения о занятости или незанятости участков пути. Соответственно каждый раз два детектора колеса образуют одну точку регистрации колеса, например, в начале или соответственно в конце участка пути.
Взаимосвязанные детекторы колеса реагируют на проезд колеса единицы подвижного состава с временным смещением, причем каждый раз при подсчете осей вначале нагружается только один, затем оба вместе и, наконец, только один другой. Имеющиеся при скоростных железнодорожных колесах только кратковременно сигналы колеса должны подаваться во входной накопитель ES оценивающего микрокомпьютера MC так, чтобы там названную последовательность срабатывания детекторов колеса можно было надежно распознавать. Это является предпосылкой для того, чтобы микрокомпьютер мог образовывать зависящие от направления движения счетные импульсы. Проблема заключается в том, что применяемый микрокомпьютер не в состоянии обрабатывать экстремально быстро следующие друг за другом сигналы колеса. По этой причине сигналы колеса вначале промежуточно запоминают синхронно по времени и затем вместе с данными времени о их поступлении передают на входной накопитель микрокомпьютера.
Детекторы колеса RD1-RD8 связаны по отдельности или попарно через сигнальные линии любой длины или систему шин с входами двух входных промежуточных накопителей EZS1 и EZS2. Эти входные промежуточные накопители попеременно активируются и при этом принимают предлагаемые им на стороне входа сигналы колеса. При предполагаемом смещении взаимосвязанных детекторов колеса, определенном режиме срабатывания детекторов колеса и предполагаемой максимальной скорости движения в 350 км/час в качестве самого короткого регистрируемого одиночного времени воздействия детекторов колеса получается значение порядка 0,6 мсек. Для обеспечения возможности надежного распознавания и оценки таких одиночных времен воздействия необходимо опрашивать поступающие сигналы колес через более короткие интервалы, чем 0,6 мсек. В принятом примере сигналы колеса поэтому считывают в ритме 0,5 мсек, причем их вводят в первый промежуточный накопитель с одним периодом считывания и во второй промежуточный накопитель с другим периодом считывания. Для этого оба входных промежуточных накопителя нагружают сигналами активации AS, которые генерируются таймером T. Этот таймер делит тактовую частоту тактовых сигналов микрокомпьютера CLK до частоты 1 кГц; входной промежуточный накопитель EZS1 реагирует на отрицательный фронт сигналов активации, входной промежуточный накопитель EZS2 - на положительный, тем самым накопители активируются попеременно соответственно через 0,5 мсек.
Промежуточно запомненные в значительной степени синхронно по времени во входных промежуточных накопителях сигналы колеса должны затем подаваться во входной накопитель ES микрокомпьютера. Это происходит также под управлением таймера T, который подводят ко входу прерывания микрокомпьютера сигналы прерывания INT с более медленной по сравнению с частотой считывания входных промежуточных накопителей частотой повторения 1 кГц. Микрокомпьютер выполнен согласно предположению для обработки сигналов прерывания с этой частотой повторения. Он проверяет при каждом сигнале прерывания, является ли необходимым принимать данные из обоих входных промежуточных накопителей во входной накопитель. Этот прием является необходимым только тогда, когда по меньшей мере в одном из входных промежуточных накопителей накоплены данные, то есть сигналы колеса, которые отличаются от накопленных во входном накопителе для соответствующих детекторов колеса сигналов колеса. Для этого процесса проверки микрокомпьютер при поступлении каждого сигнала прерывания прерывает предварительно свою обработку подсчета осей и выполняет стандартную программу прерывания. Во время этой стандартной программы прерывания микрокомпьютер вначале сравнивает находящиеся во входном промежуточном накопителе EZS1 данные с данными, накопленными в его входном накопителе для соответствующих детекторов колеса. Если имеет место совпадение, то в настоящий момент времени не должны приниматься никакие актуальные данные из входного промежуточного накопителя EZS1 в микрокомпьютер. Микрокомпьютер тогда проверяет массив данных входного промежуточного накопителя EZS2. Если он при этом также установит совпадение между данными, запомненными в промежуточном накопителе и во входном накопителе, то стандартная программа прерывания закончена и обработка подсчета осей продолжается на прерванном месте. Если соответственно изменился по меньшей мере один из сигналов колеса в одном из обоих входных промежуточных накопителей по сравнению с состоянием, запомненным во входном накопителе микрокомпьютера, то микрокомпьютер вызывает прием измененных данных из соответствующего промежуточного накопителя во входной накопитель, а именно в связи с обозначением, которое указывает микрокомпьютеру, из какого входного промежуточного накопителя поступает соответствующий сигнал колеса. Таким образом ему также известно, к какому моменту времени (нарастающий/спадающий фронт сигналов активации) этот сигнал колеса был принят в соответствующий промежуточный накопитель, и он может оценивать принятые сигналы колеса в их временной последовательности.
Для опроса содержимого входных промежуточных накопителей EZS1 и EZS2, а также при необходимости, для приема данных во входной накопитель микрокомпьютера оба входных промежуточных накопителя снабжаются сигналами управления IOR от микрокомпьютера, а также получают адреса. Последнее происходит через адресную шину AB и адресный декодер ADR-DEC, который закладывает отдельные адреса ADR1 или соответственно ADR2 в оба входных промежуточных накопителя.
В представленном примере выполнения таймер T служит не только для подготовки сигналов прерывания INT для микрокомпьютера, но также одновременно и для генерирования сигналов активации AS для обоих входных промежуточных накопителей. Путем этого многократного использования таймера удается поддерживать расходы на устройство для подсчета осей в целом очень низким, в частности, также потому, что не появляются никакие проблемы синхронизации относительно промежуточного накопления и выполнения обработки в оценивающем микрокомпьютере. Обработка поступивших во входной накопитель микрокомпьютера сигналов колеса в микрокомпьютере происходит вне стандартной программы прерывания для приема данных во входной накопитель микрокомпьютера. Для обработки больших количеств данных, которые могут кратковременно появляться, если детекторы колеса RD1-RD8 срабатывают в быстрой последовательности, входной накопитель ES микрокомпьютера должен иметь известную глубину, которая достаточна, чтобы известное время запоминать данные, которые не могут сразу обрабатываться микрокомпьютером. Объем памяти этого накопителя может быть определен эмпирическим или вычислительным путем.
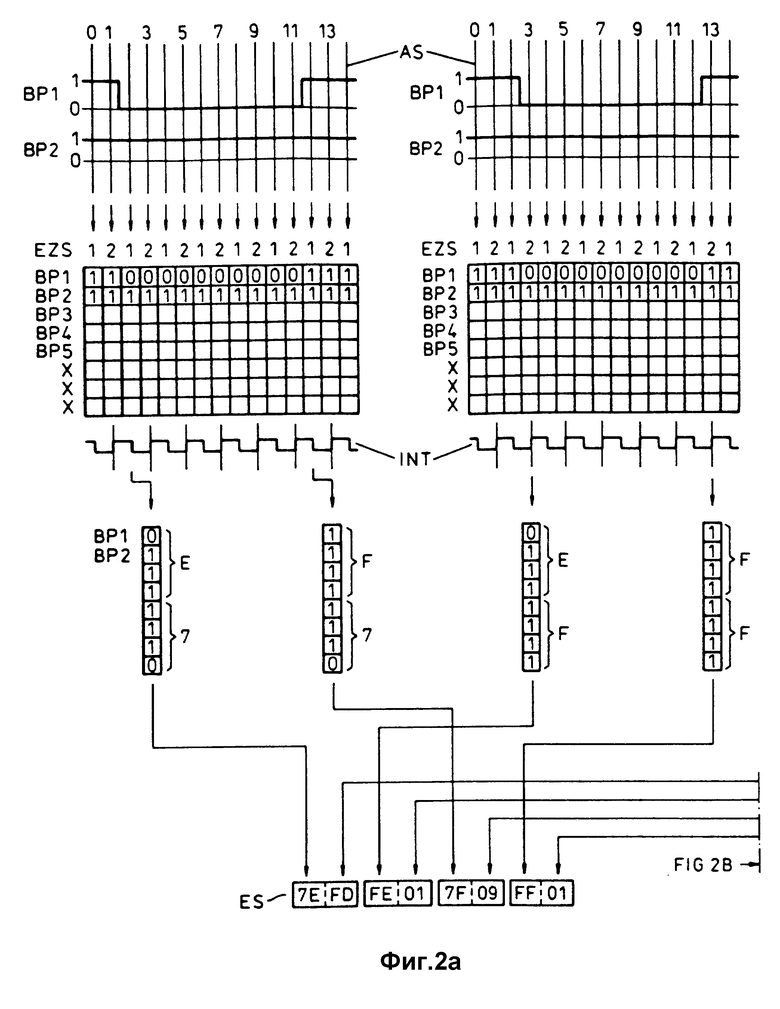
Ниже с помощью фиг. 2а и 2б поясняются более подробно временные зависимости при вводе сигналов колеса в оба промежуточных накопителя и при вводе запомненных промежуточных сигналов колеса во входной накопитель микрокомпьютера. Фиг. 2а показывает при этом процесс ввода для сигналов колеса и фиг. 2б - последующее определение моментов времени ввода сигналов колеса во входные промежуточные накопители.
В верхней части фиг. 2а представлены сигналы колеса двух детекторов колеса одной точки регистрации колеса BP1, которая получается при приведении в действие детекторов экстремально скоростным колесом единицы подвижного состава. Соответствующие друг другу фронты колеса обоих сигналов колеса имеют предположительно временное расстояние порядка 0,6 мсек. Сигналы колеса отложены на изображении с временным растром 0,5 мсек. Эти 0,5 мсек соответствуют временному расстоянию сигналов активации AS не представленных на фиг. 2а входных промежуточных накопителей. Как уже пояснялось на примере фиг. 1, сигналы колеса каждый раз собираются отдельно двумя промежуточными накопителями, причем один промежуточный накопитель распознает и запоминает особенно интересное здесь изменение фронта внутри промежутка времени максимально 0,5 мсек с момента изменения фронта, а другой распознает и запоминает его на 0,5 мсек позднее.
Входные промежуточные накопители выполнены таким образом, что они могут запоминать события проезда детекторов колеса многих точек воздействия. В настоящем примере исходят из того, что промежуточные накопители могут принимать события проезда детекторов колеса от пяти точек воздействия.
Ниже сигналов колеса на фиг. 2A, подлежащих оценке, представлено содержимое памяти модуля управления и диагностики оценивающего микрокомпьютера. Это содержимое памяти показывает данные, соответственно имеющиеся в обоих входных промежуточных накопителях (1/2) в отдельные моменты времени. Выше обоих накопительных блоков с помощью стрелки и цифры обозначено, к какому моменту времени и из какого входного промежуточного накопителя было принято значение в соответствующее накопительное поле; накопительные блоки приданы в соответствие одному или соответственно другому детектору колеса отдельных точек регистрации колеса, строки накопителя - различным точкам регистрации колеса BP1 - BP5, которые контролируются микрокомпьютером. Накопительные поля выполнены так, что они аналогично примененным входным промежуточным накопителям могут принимать события проезда от соответственно пяти детекторов колеса, а также другие не представляющие здесь интереса данные. В случае представленных в обоих накопительных блоках данных речь идет как бы о мгновенных снимках к моменту времени 14-го сигнала активации. В действительности содержимое накопителей дополняют в соответствии с новыми данными не только построчно через сообщения о событии детекторов колеса, но также и столбцами, в то время как запомненные данные вытесняют из полей памяти в направлении представления справа налево пошагово, так что накопительные поля своим содержимым отражают соответственно определенный промежуток времени актуального события.
В представленном примере можно понять, что относительно первой точки регистрации колеса BP1 первый промежуточный накопитель со вторым сигналом активации установил начало воздействия детектора, а тринадцатым сигналом активации - конец воздействия. Относительно второго детектора колеса этой точки воздействия второй промежуточный накопитель четвертым сигналом активации обнаружил начало воздействия и четырнадцатым сигналом активации - конец воздействия. Для детекторов колеса второй и остальных точек воздействия в наблюдаемом временном промежутке не было распознано никакое воздействие; для последующего наблюдения исходят из того, что соответствующие накопительные ячейки модуля управления и диагностики заняты соответственно одним битом со значением 1.
Ниже обоих накопительных блоков модуля управления и диагностики представлен такт прерывания INT для обработки сигналов колеса микрокомпьютера. Тактовая частота равна предположительно половине величины тактовой частоты сигналов активации AS для ввода сообщений о событии в оба входных промежуточных накопителя. Соответственно передним фронтом такого сигнала прерывания микрокомпьютер вызывает не поясненное на чертеже сравнение между имеющимися для приема из модуля управления и диагностики событиями проезда всех контролируемых им детекторов колеса и уже отложенными в его входном накопителе для отдельных детекторов колеса сообщениями о событии. Только когда имеет место отклонение между актуальными, отложенными в промежуточных накопителях данными, и массивом данных, отложенном в его входном накопителе, существует необходимость изменения в соответствии с новыми данными этого массива данных и выполнения для этого определенной стандартной программы прерывания. В противном случае микрокомпьютер перепрыгивает обратно вплоть до следующего прерывания в прерванную прерыванием программу и продолжает обработку запомненной информации. В данном случае микрокомпьютер к моменту времени 3 распознает, что предложенное ему сообщение о событии для первого детектора колеса первой точки воздействия является отличным от состояния сообщения, имеющегося во входном накопителе для этого детектора колеса, и вводит стандартную программу прерывания; соответствующее справедливо относительно момента времени 14, к которому микрокомпьютер распознает, что необходимо новое изменение в соответствии с новыми данными массива данных входного накопителя.
Такие изменения данных само собой разумеется не могут относиться только к детектору колеса первой точки регистрации колеса, но также и к детектору колеса других контролируемых входным промежуточным накопителем точек регистрации колеса; в этом случае произошло бы изменение данных в другой накопительной области входных промежуточных накопителей или накопительного блока модуля управления и диагностики. Чтобы зарегистрировать эти изменения микрокомпьютер с каждым прерыванием опрашивает накопительные ячейки всех контролируемых им детекторов колеса и вводит их - как только появились изменения данных - в представленный на нижнем конце фиг. 2а входной накопитель ES. Это происходит, например, путем шестнадцатеричного кодирования последовательности данных, считанной из модуля управления и диагностики к соответствующему моменту времени прерывания. Эта последовательность данных снабжается в предварительно заданном месте так называемой канальной меткой, которая показывает, что в случае принятых сообщений о событии речь идет о сообщениях о событии первых или вторых детекторов колеса контролируемых точек регистрации колеса. В данном случае первому детектору колеса каждой точки воздействия в качестве канальной метки придан нуль, а соответственно второму детектору колеса придана единица.
Соответствующим образом, как и для первого детектора колеса каждой точки регистрации колеса микрокомпьютер поступает также с сообщениями о событии вторых детекторов колеса этих точек воздействия. При предположительно очень коротком времени повторения импульсов между вызванными первым и вторым сообщениями о событии от того же колеса на следующих друг за другом детекторах колеса первой точки воздействия, получается, что микрокомпьютер к моменту времени 4 и к моменту времени 14 соответственно устанавливает другое, подлежащее изменению в его входном накопителе значение и после этого выполняет заданную стандартную программу прерывания для приема этих актуальных данных.
Эта стандартная программа прерывания содержит наряду с приемом собственно сообщений о событии и их обозначения в качестве относящегося к одному или другому детектору колеса точки регистрации колеса также установление момента времени, в который соответствующий сигнал колеса изменился. Этот момент времени, однако не является обязательно моментом времени, в который выполняется стандартная программа прерывания, более того он может лежать уже в прошлом. Это имеет место при событиях проезда рассмотренного первого детектора колеса. Там соответствующее сообщение о событии было распознано через первый промежуточный накопитель уже за 0,5 мсек перед следующим сигналом прерывания в противоположность ко второму детектору, при котором распознавание события проезда примерно совпадает с сигналом прерывания. Чтобы можно было достаточно точно определять и обрабатывать события проезда в их временной последовательности, моменты времени, в которые промежуточные накопители соответственно распознали наличие изменения сигнала колеса, должны удерживаться в микрокомпьютере для дальнейшей обработки событий проезда. Это производится согласно изобретению за счет того, что вместе с собственными сообщениями события проезда соответственно определенные временные данные хранятся во входном накопителе. Эти временные данные являются предпочтительно относительными временными данными и относятся к временному расстоянию между соответственно детектированным событием проезда и лежащим по времени перед ним событием проезда, а именно больше не разделенными по двум детекторам колеса каждой точки счета, а в действительной временной последовательности срабатывания детекторов. Описание имеющего значение временного расстояния между следующими друг за другом событиями проезда обоих детекторов колеса одной точки воздействия происходит при применении счетчика времени с предварительно определенным объемом счета, например, с объемом счета в 256 состояний счета. Этот счетчик времени, который предусмотрен или отдельно для каждой точки регистрации колеса, или совместно для всех обрабатываемых микрокомпьютером точек регистрации колеса за счет сигнала прерывания переключается вперед на два шага счета, а именно потому, чтобы его можно было при необходимости переключить назад на один шаг, если входной промежуточный накопитель распознает событие проезда на 0,5 мсек раньше, чем поступит сигнал прерывания, по которому актуальное событие проезда принимается во входной накопитель.
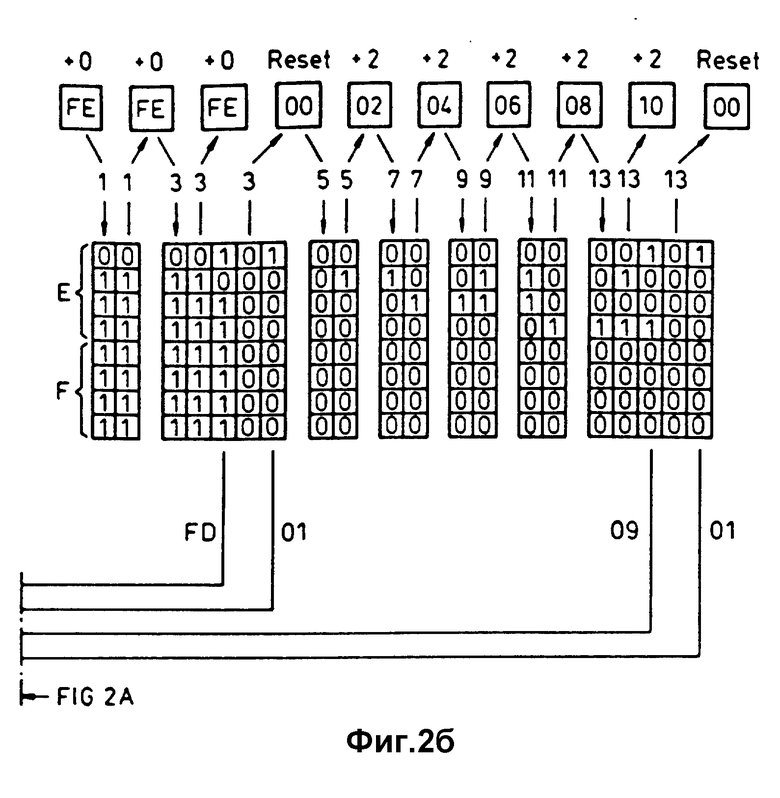
Каким образом в счетчике времени определяют временные значения, придаваемые отдельным событиям проезда, будет более подробно пояснено в связи с фиг. 2б; образованные там временные значения наряду с относящимися к ним сообщениями о событии вписываются во входной накопитель фиг. 2а.
Предположим, что счетчик времени придан совместно всем контролируемым микрокомпьютером точкам воздействия и за счет сигналов прерывания переключается вперед на два шага в свое максимальное положение счета, поскольку до этого в течение более длительного времени не должны были изменяться в соответствии с новыми данными никакие сигналы колеса. Заданное заранее максимальное положение счета вследствие предусмотренного прямого переключения счетчика каждый раз на два шага счета является, предположим, положением счета 254. В этом положении счета счетчик времени находится к моменту времени 1. Это положение счета выражается в двоичном коде битовой последовательностью 11111110. Оно соответствует шестнадцатеричному представлению FE. К моменту времени 1 микрокомпьютер по эффективному тогда сигналу прерывания считывает счетчик времени и пытается переключить его на два шага счета вперед в соответствии с выбранным временным растром. Это не является возможным, поскольку счетчик времени согласно предположению уже достиг своего максимального положения счета. Микрокомпьютер после этого снова заряжает счетчик времени соответствующим максимальному положению счета значением FE. К моменту времени 3 микрокомпьютер снова считывает со следующим сигналом прерывания счетчик времени, пытается переключить его вперед и наконец заряжает его первоначальным содержанием. Путем сравнения переданных ему от входных промежуточных накопителей через модуль управления и диагностики актуальных сигналов колеса с еще отложенной в его входном накопителе картиной состояния микрокомпьютер распознает необходимость изменить в соответствии с новыми данными свой входной накопитель. Он знает, что изменение в первом входном промежуточном накопителе детектировано, он знает поэтому также, что этот входной промежуточный накопитель детектировал изменение уже 0,5 мсек тому назад. По этой причине микрокомпьютер уменьшает по программе взятое из счетчика времени значение на один шаг счета (= 0,5 мсек) и подводит это измененное значение к входному накопителю; там оно запоминается также как байт состояния сообщений о событии, в качестве шестнадцатеричного значения FD.
Микрокомпьютер распознает также, что ему с одинаковым сигналом прерывания из другого накопительного блока модуля управления и диагностики предлагается следующий байт состояния для следующих событий проезда. Изменение исходит из второго входного промежуточного накопителя и является таким образом одновременным с сигналом прерывания. Микрокомпьютер мог бы теперь запомнить считываемое из счетчика времени значение счета FE для спадающего фронта распознанного вторым детектором колеса сигнала колеса и определить временное расстояние обеих фронтов детекторов колеса за счет образования разницы. Однако это потребовало бы отдельной операции счета. Чтобы избежать этой операции счета, микрокомпьютер с распознаванием и запоминанием тех фронтов сигнала колеса, по отношению к которым должно определяться временное расстояние возможно плотно следующего фронта другого сигнала колеса, вызывает обратную установку счетчика времени в основное положение. Как только, как здесь предполагается, к моменту времени наблюдения уже имеется актуальное сообщение о событии от другого детектора, микрокомпьютер вызывает повышение выбираемого затем из счетчика времени значения счета 00 для временной записи этого сообщения о событии на один шаг счета; произведенной до сих пор синхронизацией счетчика времени на первый детектированный фронт сигнала колеса рассмотренной пары фронтов сигнала получается временное расстояние следующего фронта сигнала колеса непосредственно из запомненного для этого фронта во входном накопителе временного значения 1•0,05 мсек.
Следующий сигнал прерывания появляется к моменту времени 5. Это приводит к переключению счетчика времени на два шага счета в положение счета 00000010 соответственно временному сдвигу 2•0,5 мсек. Это же получается к моменту времени 7, 9, 11 и 13, причем счетчик времени соответственно переключается вперед на два шага. К моменту времени 13 микрокомпьютер снова распознает необходимость изменения в соответствии с новыми данными накопленных в его входном накопителе сообщений о событии. При этом он вначале принимает новые байты события первого детектора колеса в шестнадцатеричной форме как 7F и затем определяет соответствующее им временное значение. Исходя из имеющегося положения счета 00001010 счетчика времени, микрокомпьютер вычитает один шаг счета (промежуточный накопитель детектировал событие уже за 0,5 мсек до того) и вносит результат 09 при соответствующем событии проезда во входной накопитель. Теперь он знает, что обратный фронт первого импульса колеса появился через девять единиц, равных 4,5 мсек, после появления переднего фронта импульса сигнала на втором детекторе колеса.
Микрокомпьютер распознает из обозначений канала переданных ему байтов состояния, что он полностью ввел первый сигнал колеса в свой входной накопитель и предпринимает после этого обратную установку счетчика времени в его основное положение. Он далее распознает наличие второго байта состояния, который предлагается ему через второй входной промежуточный накопитель. Имеющееся там сообщение о состоянии расположено через 0,5 мсек после подведенного ему с тем же сигналом прерывания сообщения о состоянии первого входного промежуточного накопителя. Он суммирует затем значение 1 с мгновенным положением счета счетчика времени и запоминает таким образом найденное значение 01 при соответствующем сообщении о событии во входном накопителе.
При отдельных сообщениях о событии тогда отложены значения времени, которые представляют временное расстояние относительно предыдущего запомненного значения события.
Обратная установка счетчика времени с наличием полного сигнала колеса детектора колеса RD1 не является обязательно необходимой. Однако так же, как и при обоих падающих фронтах сигнала колеса к началу временного промежутка наблюдения, является возможным оставлять счетчик времени после переключения вперед неизменным. В этом случае, однако, было бы необходимым определять временное смещение обоих нарастающих фронтов сигнала колеса путем процесса вычитания. При обратной установке счетчика времени нарастающим фронтом первого сигнала детектора колеса искомое временное значение для временного расстояния нарастающих фронтов сигнала колеса получается непосредственно из запомненного временного значения. Только это является причиной для изменения опрошенных временных значений на один шаг счета при детектирования сообщения о событии, которое по времени лежит после вызывающего обратную установку счетчика времени сообщения о событии.
Наряду с изображенным видом обозначения отдельных сообщений о событии возможными являются другие определения временных значений, в частности такие, которые обозначают временное расстояние отдельных фронтов от первого события проезда колеса единицы подвижного состава в точке регистрации колеса. Возможно также придавать в соответствие отдельным сообщениям о событии абсолютные временные значения из предусмотренного для этого датчика времени. Важным в этом случае является, чтобы компьютер был в состоянии на основании установленных для сообщений о событии моментов времени или промежутков времени делать достаточно точные высказывания о взаимном смещении подлежащих оценке сигналов колеса.
Для вышеописанного примера выполнения было предположено, что внутри промежутка времени наблюдения активируют только детекторы колеса точки регистрации колеса BP1. На практике детекторы колеса многих точек регистрации колеса активируют с взаимным пересечением во времени. В этом случае для точек регистрации колеса можно предусматривать отдельные счетчики времени или, однако, может быть предусмотрен только один общий счетчик времени, через который детектируют временное смещение сообщений о событии, независимо от того, от какого детектора колеса или соответственно от какой точки регистрации колеса они происходят.
Применение изобретения неограничено только применением двух быстрых входных промежуточных накопителей для не критичного с точки зрения времени ввода сигналов колеса. Более того возможно вместо двух входных промежуточных накопителей предусматривать три или еще больше промежуточных накопителей, которые имеют возможность циклического управления, причем время переключения от одного к другому входному промежуточному накопителю является меньшим, чем самое короткое одиночное время воздействия подлежащих детектированию сигналов колеса; длительность периода сигналов прерывания тогда соответственно втрое или вчетверо больше, чем время повторения переключения входных промежуточных накопителей и соответственно нужно опрашивать больше промежуточных накопителей. В этом случае подлежащие выборке из счетчика времени временные значения должны при необходимости уменьшаться во входном накопителе на величину до двух или более шагов счета.
Вместо одного единственного микрокомпьютера, как в представленном примере выполнения, можно принимать и обрабатывать сигналы колеса также от множества микрокомпьютеров надежной микрокомпьютерной системы, причем эти микрокомпьютеры непрерывно или с управлением событием приводят к возможно раннему распознаванию нарушений обработки в оценке сигнала колеса.
Как уже пояснялось в начале описания, соответствующее изобретению устройство целесообразно применять не только при подсчете осей, но и с преимуществом также для определения скорости колес единиц подвижного состава, проезжающих мимо измерительного участка с двумя детекторами колеса. Также и здесь возникает та же самая проблема, а именно временной оценки быстро следующих друг за другом импульсов колеса. Соответствующим изобретению устройством можно также вызывать на расположенных на расстоянии друг от друга парах детекторов колеса как зависящие от направления движения импульсы счета для подсчета осей, так и одновременно получать информацию о скорости проезжающих мимо колес подвижного состава.
Устройство содержит детекторы колеса, предназначенные для формирования при прохождении железнодорожного колеса сигналов колеса. Детекторы расположены по два в каждой точке регистрации и подключены к n входным промежуточным накопителям. Имеется по меньшей мере один микрокомпьютер, запрограммированный с возможностью опроса входных промежуточных накопителей и сравнения их содержания с содержанием собственного входного накопителя во время прерывания и с возможностью приема соответствующего актуального сообщения в случае выявления изменения содержания входного промежуточного накопителя по сравнению с содержанием собственного входного накопителя до начала прерывания с указанием времени приема соответствующего сообщения в указанный входной промежуточный накопитель. Технический результат заключается в обеспечении возможности регистрации проследования колес высокоскоростного подвижного состава, оценки сигналов колеса, поступающих с последовательно опрашиваемых входных промежуточных накопителей, и определения изменения их содержания сигналов активации. 7 з.п.ф-лы, 2 ил.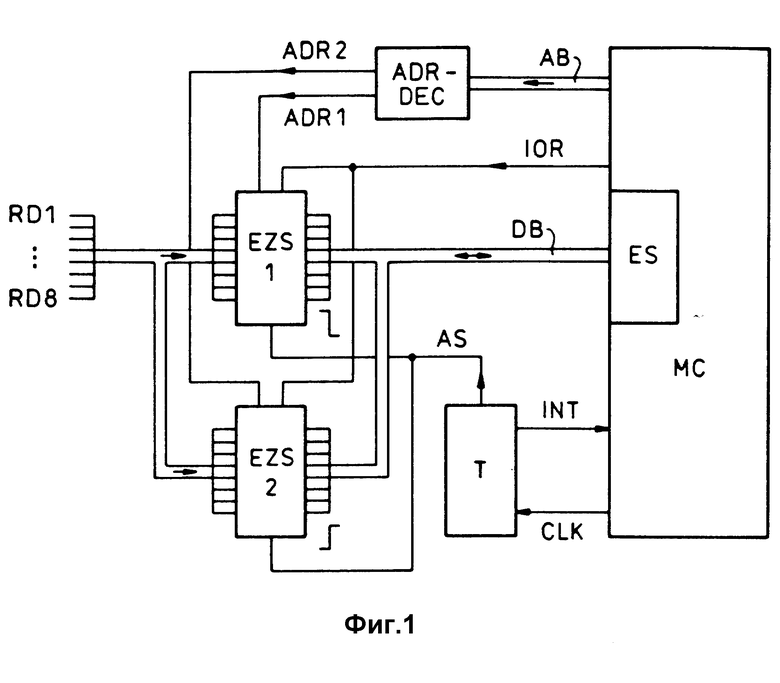
| DE N 3431171 A1, 06.03.86 | |||
| SU, N 1643272 A1, 23.04.91 | |||
| SU, N 1623904 A1, 31.01.91 | |||
| SU, N 1402474 A, 15.06.88. |

