Изобретение относится к устройству для планирования сыпучих грузов для разравнивания насыпных конусов, возникающих при загрузке транспортного средства, в частности железнодорожных вагонов, сыпучим грузом.
Известно устройство для планирования сыпучего груза для разравнивания насыпных конусов, возникающих, в частности, при загрузке железнодорожных вагонов сыпучим грузом, содержащее рамную конструкцию с верхней рамой, соединенный с верхней рамой планировщик, имеющий нижнюю раму с планировочной балкой, предпочтительно с плугом и расположенным в направлении перемещения транспортных средств планировочным катком подъемное устройство для движения планировщика между верхним и нижним конечными положениями (см. авторское свидетельство N 479706, кл. B 65 G 69/16 1972 г.).
Известные устройства используются, прежде всего, для сыпучего груза, перевозимого в железнодорожных вагонах. Это не исключает, само собой разумеется, его использование для сыпучего груза, перевозимого в других транспортных средствах, таких как грузовые автомобили и корабли.
Разравнивание насыпных конусов служит, прежде всего, для предотвращения чрезмерного пылеобразования при транспортировке сыпучего груза, а также из соображений безопасности должно предотвратить погрузку лишнего сыпучего груза и помочь исчерпать грузосовместимость. Известное устройство для планирования сыпучего груза состоит из верхней и нижней рамы устойчивой конструкции из стального проката. Обе рамы связаны друг с другом с помощью прямолинейных направляющих, смещенных относительно своей оси. Верхняя рама прочно установлена на соответствующей нижней конструкции над погрузочной колеей. Нижняя рама служит для приема планировочной балки и подключенных планировочных катков, с помощью которых утрамбовывают сыпучий груз.
Нижняя рама планировщика соединена при помощи по крайней мере одного стального троса с подъемным устройством, прочно установленным на верхней раме. Подъемное устройство оснащено скоростной ступенью для движения с малой скоростью. Для верхней и нижней точки концевого переключения установлен, соответственно, концевой выключатель. Управляет подъемным устройством оператор с пульта управления с помощью кнопки. С помощью этой кнопки и визуального контроля оператор перемещает планировщик на желаемую высоту над вагоном, в котором должен произойти процесс разравнивания насыпного материала. Если нужна высота, необходимая для разравнивания, не найдена сразу, оператор ведет планировщик вниз, пока на не будет найдена. Этот процесс нужно повторять по мере необходимости для каждого вагона.
Наряду с наблюдением за процессом планирования оператор должен также обязательно обращать внимание на разную высоту вагонов. Если вагон, следующий за тем, в котором производятся планировочные работы, выше предыдущего, оператор должен своевременно приподнять планировщик, так как в противном случае появляется серьезная опасность, что последний будет снесен большим по высоте вагоном и что появятся, по меньшей мере, серьезные повреждения вагона и планировщика.
По окончании процесса разравнивания оператор возвращает планировщик наверх в исходное положение.
Очевидно, что обслуживание известного планировщика сыпучего груза требует повышенного внимания со стороны оператора, причем в любом случае не исключены ошибки.
Задачей предложенного изобретения является создание планировщика насыпных конусов вышеназванного типа, работающего в значительной степени в автоматическом режиме и при этом гарантирующего высокую степень надежности и удобное управление для оператора и, прежде всего, предотвращающего столкновение планировщика в опущенном состоянии с транспортными средствами, находящимися в зоне работ.
Эта задача решается в соответствии с изобретением, причем устройство снабжено зондирующим устройством, связанным с подъемным устройством через аппаратуру управления для предотвращения столкновения планировщика с транспортным средством с сыпучим грузом, при этом зондирующее устройство содержит первые зондирующие средства, установленные на планировщике, и второе зондирующее средство, установленное на верхней раме, а подъемное устройство выполнено в виде тросовой тяги с возможностью работы с, по меньшей мере, одной высокой и одной малой скоростями, причем верхняя и нижняя рамы соединены друг с другом с помощью, по меньшей мере двух параллельных поворотных рычагов.
Устройство для планирования сыпучего груза включает, как правило, погрузочное устройство, с помощью которого происходит погрузка сыпучего груза в транспортное средство для его перевозки. Изобретение предусматривает, что подъемное устройство связано с погрузочным устройством через аппаратуру управления, причем планировщик автоматически перемещается в верхнее положение, когда погрузочное устройство не было задействовано через определенный промежуток времени. Таким же образом предусмотрена соответствующая связь с планировщиком, причем последний перемещается также автоматически наверх, если он не был задействован через определенный промежуток времени. Это принудительное перемещение наверх гарантирует, что планировщик не находится без надобности в зоне опасности, так что в это время полностью исключается возможность повреждений.
Зондирующее устройство служит для того, чтобы планировщик не касался, например, железнодорожного вагона и не мог быть им поврежден. То же самое относится к самому устройству, так как оно, согласно изобретению, является бесконтактным. На основании изобретения планировщик можно, по меньшей мере, частично автоматизировать, так как процесс разравнивания нельзя больше контролировать визуально и больше не существует опасности повреждений или разрушений планировщика. Если, например, изменяется высота следующего вагона, то первое средство зондирования своевременно регистрирует его, после чего нижнюю раму или планировщик поднимают так высоко, пока не достигнут соответствующей высоты следующего для разравнивания насыпного материала вагона. Второе средство зондирования регистрирует транспортер с сыпучим грузом, находящийся в зоне планировщика. Тем самым обеспечивается принудительное перемещение планировщика в верхнее неподвижное положение и предохранение его от повреждений в случае вторжения во время процесса разравнивания следующего, по мере надобности большего по высоте вагона в зону регистрации второго средства зондирования. Второе средство зондирования направлено предпочтительно вниз.
Наличие устройства с туго натянутыми тросами обеспечивает хорошую регулировку планировщиком и, в частности, моментальное реагирование прибора на быстро приближающийся транспортер с сыпучим грузом. Оно обеспечивает сохранение тросов в постоянно натянутом состоянии также при опускании планировщика, так что планировочное устройство может соответственно быстро пониматься при помощи подъемного устройств.
Оказалось, что подъемное устройство, выполненное в виде тросовой тяги, является для заявленного режима работы не только экономичным, но и надежным в эксплуатации. В любом случае подразумевается, что могут использоваться также и другие подъемные устройства. Имеются в виду, например, зубчатый рычажный механизм или пневматическая или гидравлическая стойка, которые соединяют обе рамы.
Особенно целесообразным при достижении максимальной степени надежности для планировщика является наличие в подъемном устройстве, по меньшей мере, одной высокой и одной малой скорости подъема. При этом высокая скорость подъема рассчитывается таким образом, что планировщик, исходя из конфигурации приближающегося транспорта с сыпучим грузом, является подвижным, пока тот не коснется нижней рамы. Благодаря изобретению, во-первых, имеется ступень медленной рабочей скорости, с которой подъемное устройство перемещает планировщик на соответствующую высоту для разравнивания сыпучего груза. Высокая скорость устанавливается с помощью аппаратуры управления тогда, когда зондирующее устройство подает соответствующий импульс. В подобном случае с помощью зондирующего устройства и аппаратуры управления определяют возможность своевременного перекрытия большой разности высот при рабочей скорости. Это, соответственно, тот случай, когда регистрируется быстро приближающийся транспорт с сыпучим грузом. Затем подъемное устройство переключается с рабочей скорости на быструю скорость, так что планировщик выводится своевременно из зоны опасности. Расчет максимальной скорости зависит от расположения и дальности действия устройств зондирования заявленного устройства, а также максимально достигаемой скорости движения состава. Расчет быстрой скорости подъема известен специалисту и может быть просто составлен по формуле, причем также должен быть учтен известный коэффициент надежности.
Наконец, предусмотрено третье средство зондирования, расположенное на некотором расстоянии перед устройством для планирования сыпучего груза и предпочтительно также позади него в зоне погрузочной колеи или проезжей части и регистрирующее приближающийся транспортер с сыпучим грузом. Это третье средство зондирования служит для узнавания на ранней стадии о приближении к устройству для планирования транспорта с сыпучим грузом, не ожидаемого и, например, движущегося с повышенной скоростью. В этом случае транспорт регистрируется, и планировщик перемещается в верхнее неподвижное положение.
Если первые средства зондирования расположены на оси в направлении движения и против движения транспортных средств, установлено, что заявленное устройство для планирования сыпучего груза, во-первых, может использоваться с двух сторон и, во-вторых, что оно соответственно защищено с двух сторон от соприкосновения.
Чтобы обеспечить максимальную степень надежности для планировщика, в направлении движения и против движения в каждом из зондирующих средств предусмотрены, по меньшей мере, два расположенных предпочтительно друг над другом чувствительных элемента. Благодаря этому даже при выходе из строя одного чувствительного элемента гарантируется, что будут осуществлены съем сигнала и регистрация приближающегося транспорта с сыпучим грузом. Если с помощью чувствительных элементов, расположенных друг над другом, устанавливают незначительную разность высот двух вагонов, планировщик можно слегка приподнять для перекрытия этой разности высот. Если с помощью чувствительных элементов, расположенных друг над другом, устанавливают большую разность высот между вагоном, в котором ведутся планировочные работы, и следующим за ним, с аппаратуры управления поступает соответствующий импульс, так что планировщик занимает свое положение наверху при помощи подъемного устройства.
В конструктивном оформлении этого изобретательского замысла предусмотрено, что средства зондирования выполнены с инфракрасными чувствительными элементами. Такие средства зондирования оказались особенно экономичными и пригодными для использования в устройстве для разравнивания насыпного материала.
Если планировщик долгое время находится в верхнем положении, представляется возможность сохранения его в этом положении с помощью блокирующего устройства. При этом речь идет предпочтительно о механической блокировке. Нужно подчеркнуть, что преднамеренное перемещение вниз планировщика может произойти по разным причинам, благодаря функциональным ошибкам. Их можно избежать благодаря механической блокировке.
Для обеспечения быстрого процесса планирования далее предусмотрены верхний и нижний неподвижно установленные аварийные предельные выключатели для максимального ограничения движения планировщика и верхний и нижний переставные рабочие предельные выключатели для ограничения движения планировщика.
Положение верхнего и нижнего аварийного предельного выключателя неподвижно, в то время как рабочий предельный выключатель установлен с возможностью перестановки. Указанные выключатели служат для дальнейшей автоматизации заявленного устройства. Например, при приближении транспорта с сыпучим грузом можно определить, в какой высотной зоне расположены подлежащие разравниванию насыпные конусы. С помощью нижнего в верхнего рабочего предельного выключателя можно затем установить соответствующую разность высот, по которой перемещается планировщик во время планировочных работ. Верхние и нижние предельные выключатели представляют максимальные границы движения и могут связываться с концевыми выключателями, отключающими подъемное устройство после установки его в соответствующее положение. То же самое относится, естественно, также к рабочему предельному выключателю.
Для дальнейшей автоматизации заявленное устройство снабжено, по меньшей мере, одним измерительным устройством, связанным с подъемным устройством, в частности сельсиндатчиком, для регистрации высотных отметок транспортного средства с сыпучим грузом.
Подразумевается, что измерительные устройства связаны с подъемным механизмом через аппаратуру управления. Таким образом, больше не требуется постоянной дополнительной настройки подъемного устройства для достижения им нужного положения. Можно также успешно избежать ошибочных оценок, которые могут произойти по вине обслуживающего персонала.
Если состояние блокирования регистрируется с помощью соответствующего устройства и передается дальше в аппаратуру управления, с помощью которой подъемное устройство блокируется, то планировщик может повредить и разрушить блокировочное устройство, если оператор неумышленно приводит в действие подъемное устройство при заблокированном планировщике.
Во избежание повреждения подъемного устройства оно оснащено перегрузочным предохранительным подъемником устройства. Если номинальная нагрузка достигает 110%, то перегрузочный предохранитель автоматически отключает механизм.
Для уменьшения пылеобразования при проведении планировочных работ в соответствии с другой выгодной формой выполнения изобретения на нижней раме планировщика предусмотрено регулируемое форсуночное оросительное устройство, так что в зависимости от вида сыпучего груза можно подавать больше или меньшей воды или вообще не подавать ее.
Другие признаки, преимущества и цели предложенного изобретения видны из последующего описание примеров выполнения на основании чертежа. При этом все описанные и/или изображенные на чертеже признаки сами по себе или в любой смысловой комбинации составляют предмет предложенного изобретения.
Единственная фигура представляет схематично вид сбоку заявленного устройства для планирования насыпного материала.
Заявленное устройство для планирования насыпного материала 1 имеет рамочную конструкцию 2 с верхней горизонтальной рамой 3, на которой расположено подъемное устройство 4. На нижней стороне верхней рамы 3 укреплены два параллельных поворотных рычага 5 и 6, соединенных шарнирами с верхней рамой 3 в местах, обозначенных цифрами 7 и 8. Нижние концы поворотных рычагов соединены шарнирами с планировщиком 11 в точках 9 и 10. Планировщик 11 имеет по сравнению с верхней рамой 3 нижнюю раму 12, планировочную балку с плугом 13 и подключенный планировочный каток 14, установленный в направлении перемещения F. Поворотные рычаги 5 и 6 при такой форме выполнения соединены шарнирами с нижней рамой 12. С нижней рамой 12 соединена также планировочная балка 13, выполненная в виде плуга. Наконец, планировочный каток расположен на нижней раме 12 и вращается.
Подъемное устройство 4 в представленном примере выполнения выполнено в виде тросовой тяги 15, которая имеет по меньшей мере один трос 16, соединенный с нижней рамой 12 планировщика 11. Как показано пунктиром над верхней рамой 3, она может смещаться вверх благодаря удлинению рамной конструкции 2. Рамная конструкция 2 находится над погрузочной колеей 17 и там установлена предпочтительно неподвижно. Через рамную конструкцию 2 может проходит в предложенном случае транспорт для перевозки сыпучего груза, в виде железнодорожных вагонов 18 и 19. Вагоны 18 и 19 тянет или соответствующий тягач, или механизм лебедки. Вагоны 18 и 19 поступают от погрузочной площадки, где они наполнялись соответствующим сыпучим грузом.
К планировочному устройству 1 относится бесконтактное зондирующее устройство, имеющее различные средства зондирования, которые далее рассматриваются более подробно. На планировщике 11, в основном на нижней раме 12, предусмотрены первые средства зондирования 20, 21 зондирующего устройства. Средство зондирования 20 установлено на оси против направления движения F, в то время как средство зондирования 21 установлено на оси в направлении движения. Каждое из этих двух средство 20, 21 имеет, по меньшей мере, один единственный чувствительный элемент, два чувствительных элемента, расположенных рядом друг с другом или два чувствительных элемента, расположенных предпочтительно друг над другом, что подробно не изображено.
Бесконтактное зондирующее устройство предусмотрено далее со вторым средством зондирования 22, которое помещено на верхней раме 3 и направлено вниз по оси. Точка крепления находится в направлении движения перед наружной точкой соединения на шарнирах 8 рычага 6. Затем на некотором расстоянии перед рамной конструкцией 2 и за ней предусмотрены третьи средства зондирования 23, 24, расположенные по оси в направлении боковых стенок проезжающих вагонов. Как средства зондирования 20, 21, так и средства зондирования 22, 23, 24 могут иметь, соответственно, один или также два чувствительных элемента с целью уменьшения возможности выхода из строя какого-то одного средства зондирования. В предложенном случае речь идет об ультразвуковом барьере, однако вполне возможно использование других бесконтактных средств зондирования.
Средства зондирования 20-24 связаны с тросовой тягой 15 через аппаратуру управления. Тросовая тяга в дальнейшем будет рассмотрена более детально. Тросовая тяга может работать на двух скоростях. При этом существует, во-первых, относительно медленная рабочая скорость, а во-вторых, высокая скорость подъема. Высокая скорость подъема рассчитывается в зависимости от измеренных средствами зондирования значений, которые обрабатываются с помощью аппаратуры управления, причем планировщик 11, исходя из контура приближающегося транспорта с сыпучим грузом, является подвижным, пока он не коснется планировочных балок. Так, высокая скорость подъема при скорости вагонов 18, 19 0,4 - 0,5 м/сек и при расстоянии между торцовой стенкой и двумя следующими друг за другом вагонами, равном 1 м, может составлять по меньшей мере 0,255 м/сек, если тросовая тяга слегка приподнимает планировщик на 510 мм. С учетом соответствующей безопасности скорость должна составлять порядка 0,373 м/сек.
Тросовая тяга 15, грузоподъемность которой составляет около 50 кн, предусмотрена с устройством предохранения от перегрузок или с возможностью отключения при перегрузках, которое отключает тросовую тягу при 110%-ной номинальной нагрузке. Рабочая нагрузка тросовой тяги составляет 32 кн, что означает 16 кн на один трос, если используется 2 троса. Перегрузочное предохранительное подъемное устройство нужно в том случае, когда планировщик в положении разравнивания зависает над объектом. Как правило, при этом оператор будет предпринимать попытку "освободить" планировщик с помощью тросовой тяги. Поэтому во избежание повреждений предусмотрено отключение при перегрузках.
Наряду с возможностью отключения при перегрузках тросовая тяга 15 предусмотрена с устройством туго натянутого троса или устройством отключения при ослаблении троса и с предохранительным устройством крана (аварийный выключатель). Затем она оснащена предельным выключателем переда с 4-мя контактами. При этом речь идет о верхнем и нижнем аварийном предельном выключателе, а также верхнем и нижнем рабочем предельном выключателе.
Устройство отключения при ослаблении троса, не рассмотренное более подробно, держит трос или тросы постоянно в натянутом состоянии. Верхний и нижний аварийные предельные выключатели задают крайние положения планировщика.
На единственной фигуре пунктиром обозначено верхнее положение в соответствии с расположением верхнего аварийного предельного выключателя. Между разностью высот, установленной с помощью верхнего и нижнего аварийного предельного выключателя, находятся верхний и нижний рабочие предельные выключатели. Поле срабатывания рабочего выключателя высоту вагона можно предварительно выбирать, например, из следующих значений: 2,8 м, 3,4 м, 4,2 м, 4,4 м. Планировщик 11 достигает после этого верхнего рабочего выключателя (заданной точки хода) и затем желаемой высоты. Если планировочную балку во время его заданного хода необходимо привести в нужное положение, то предварительный поиск высоты заканчивается. Предварительный поиск высоты может возобновиться с помощью рабочего выключателя или с помощью аварийного выключателя. Ручное управление в это время заблокировано.
До и после предварительного выбора высоты ручное обслуживание ведется активно. Оператор, таким образом, может осуществлять ручное управление с установкой в любое положение между верхним и нижним рабочим концевым выключателем. Далее планировщик 11 связан с погрузочным устройством благодаря вышеназванному управлению. Если погрузочное устройство не было задействовано через определенный промежуток времени, планировщик автоматически перемещается к верхней точке рабочего предельного выключателя и занимает неподвижное положение. То же самое происходит, если сам планировщик не был задействован через определенный промежуток времени. Когда планировщик 11 перемещается наверх к месту остановки, тросовая тяга 15 выключается при помощи верхнего рабочего предельного выключателя. Чтобы исключить нежелательное опускание планировщика 11, например, из-за пробуксовывания тормозов во время длительного простоя, предусмотрена механическая блокировка, которая может осуществляться либо вручную, либо также при помощи соответствующего блокирующего устройства. Состояние блокирования регистрируется при помощи измерительного устройства и отмечается на диспетчерском пульте, например, с помощью красной лампочки.
Для выполнения планировочных работ сначала должен быть деблокирован планировщик, что регистрируется при помощи измерительного устройства. Верхний рабочий предельный выключатель регистрирует планировщик и после деблокировки с помощью измерительного устройства, подает сигнал "готов к работе" на диспетчерский пульт, например, при помощи зеленой лампочки. Планировщик модно привести в желаемое положение, нажав кнопку. Можно достигнуть соответствующих высотных отметок благодаря одному нажатию кнопки соответствующей высоты. Регистрация высоты происходит с помощью измерительных устройств, сельсиндатчиков или подобных измерительных приборов, которые в соответствии с желаемой высотой регистрирует соответствующее положение планировщика и передают для дальнейшего управления.
Если отдельные средства зондирования выходят из строя или не принимаются меры безопасности при эксплуатации тяговой тяги, это может привести к автоматическому отключению механизма лебедки или к отключению оптических и акустических предупредительных сигналов.
Затем при неисправности устройства туго натянутых тросов может быть прервано ручное обслуживание, а также предварительный выбор высоты. После устранения неисправности нужно либо снова проводить предварительный выбор высоты, либо находить желаемую точку вручную. При неисправности перегрузочного выключателя после устранения неисправности нужно задействовать кнопку квитирования. Затем, как и в устройстве туго натянутых тросов, нужно вновь делать выбор. Если задействуется один из аварийных выключателей, вручную или при помощи предварительного выбора высоты, то соответствующее направление движения вагонов блокируется. Это можно сделать только при ручном управлении с помощью концевого выключателя. Если погрузочное устройство не готово к работе, то его нельзя приводить в действие с главного пульта управления. Благодаря переключению подводящей линии с основного управления на периферийное появляется возможность управлять установкой в ремонтном режиме. Далее предусмотрено перекрытие рабочих концевых выключателей. В таком режиме оператор, минуя рабочие концевые выключатели, может, таким образом, осуществить проверку аварийных концевых выключателей. В случае срабатывания аварийного выключателя дальнейшее перемещение в этом направлении блокируется. Если состав въезжает в устройство для планирования насыпного материала в ошибочном направлении, то планировщик переводится принудительным образом в верхнее положение рабочего концевого выключателя. То же самое происходит в направлении движения, когда не установлена ни одна из четырех высот. Если планировочные работы ведутся вручную и планировочная балка приближается к концу вагона менее, чем на 1 м, то рычаг перемещается к верхнему рабочему концевому выключателю.
В общем можно констатировать, что предложенное изобретение дает возможность обеспечивать надежную работу устройства для планирования насыпного материала, причем планировщик защищен от соприкосновения с вагонами. Запуск установки может осуществляться вручную, в полуавтоматическом или полностью автоматическом режиме. Применение ее возможно везде, где используется насыпной материал.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРСУНОЧНОГО ОРОШЕНИЯ ВОДОЙ ЗАГРУЖЕННЫХ СЫПУЧИМ МАТЕРИАЛОМ ТРАНСПОРТНЫХ СРЕДСТВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2117624C1 |
| Подвесной проходческий полок | 1974 |
|
SU722500A3 |
| Рабочее оборудование экскаватора-планировщика | 2023 |
|
RU2803183C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОЙ ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ В ВАГОНЕ | 1990 |
|
RU2022895C1 |
| ПЕРЕГРУЗОЧНАЯ СИСТЕМА | 1997 |
|
RU2191714C2 |
| СПОСОБ УСТАНОВКИ ЛИФТА | 2013 |
|
RU2644074C2 |
| Установка для получения жидких продуктов из угля | 1984 |
|
SU1360589A3 |
| Дверь для коксовых печей с горизонтальными камерами | 1984 |
|
SU1505443A3 |
| Скребковый механизм | 1970 |
|
SU506558A1 |
| СИСТЕМА ДЛЯ ЗАГРУЗКИ И ТРАНСПОРТИРОВКИ МЕЛКОДИСПЕРСНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2294889C1 |
Изобретение относится к устройствам для разравнивания грузов, загружаемых в транспортные средства. Устройство для планирования сыпучего груза для разравнивания насыпного конуса, возникающего при погрузке в железнодорожные вагоны сыпучего груза, содержит рамочную конструкцию с верхней рамой и связанным с ней планировщиком, имеющим нижнюю раму с планировочной балкой, предпочтительно с плугом, и подключенным в направлении движения планировочным катком, и подъемное устройство для движения планировщика между верхним и нижним конечными положениями. Кроме того предусмотрен бесконтактный зондирующий датчик, связанный с подъемным устройством через пульт управления. Движение планировщика регулируется таким образом, что решается задача предотвращения столкновения планировщика с транспортным средством с сыпучим грузом. 9 з.п. ф-лы, 1 ил.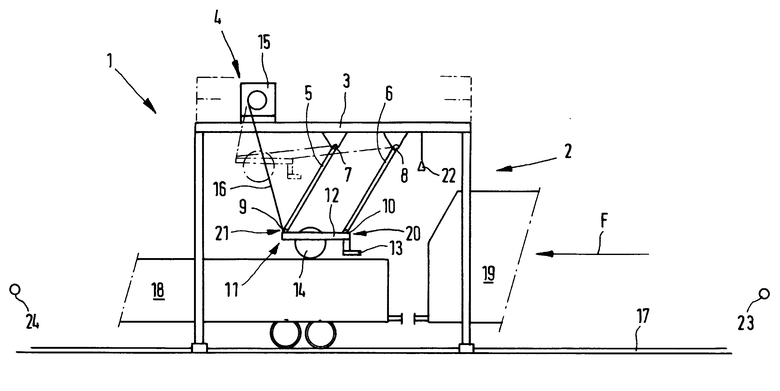
| Устройство для разравнивания и уплотнения поверхности сыпучего груза | 1972 |
|
SU479706A1 |
| US 4659274 A, 21.04.87 | |||
| Устройство для разравнивания и уплотнения сыпучих грузов | 1989 |
|
SU1736878A1 |
