Изобретение относится к области фотограмметрии.
Известен способ ориентирования путем раздельного определения положения каждого из снимков стереопары по опорным точкам [1]. В основе способа лежат проективные соотношения координат точек снимка и местности, что позволяет обрабатывать снимки без использования элементов внутреннего ориентирования.
Недостатки способа проявляются в его технологических свойствах. Для ориентирования каждого из снимков необходимо иметь не менее шести планово-высотных опорных точек. Погрешности измерений часто вызывают несоизмеримо большие ошибки в результатах ориентирования снимков, особенно в условиях равнинной местности.
Наиболее близким к предлагаемому заявлению является способ, включающий в себя внутреннее ориентирование снимков, взаимное ориентирование пары снимков, внешнее ориентирование полученной модели объекта по опорным точкам [2]. В основе способа лежат перспективные соотношения координат точек снимков и местности и поэтапная схема построения модели. Это позволяет использовать для ориентирования как планово-высотные, так и плановые, и высотные опорные точки. Способ позволяет использовать минимальное количество планово-высотных опознаков - три.
К недостаткам способа следует отнести то, что он требует перевода измерений в систему координат левого и правого снимка с учетом точных значений элементов внутреннего ориентирования. Это заставляет выполнять дополнительные измерения калибровочных меток и тщательную предварительную обработку измерений. В результате существенно возрастают объемы измерений. При обработке изображений, полученных неметрическими камерами, способ требует предварительного высокоточного определения элементов внутреннего ориентирования снимков и нанесения калибровочных меток в фокальной плоскости съемочной камеры. Способ практически неприменим для целей обработки изображений с переменными параметрами внутреннего ориентирования, таких как видеофильмы и цифровые кадры.
Задачей изобретения является:
- уменьшение объема дополнительных измерений и упрощение предварительной обработки измерений с сохранением точности прототипа при ориентировании снимков стандартной аэрофотосъемки;
- обеспечение обработки снимков, полученных неметрическими камерами без предварительной калибровки аппаратуры;
- обеспечение обработки изображений с переменными параметрами внутреннего ориентирования на основе приближенной калибровки аппаратуры.
Поставленная задача решается путем приближенного внутреннего ориентирования снимков, взаимного ориентирования и афинного внешнего ориентирования полученной модели объекта.
Для внутреннего ориентирования на снимках намечают положение главной точки с погрешностью 1-2 мм. Снимки устанавливают на стереокомпараторе и ориентируют по начальным направлениям. Измерительные марки наводят на главные точки левого и правого снимков. Отсчеты на главные точки используют для приближенного перехода от системы координат прибора в систему координат снимка по формулам
x = Ox - MOx;
y = Oy - MOy;
x' = xi - Op + MOp; (1)
y' = yi - Oq + MOq,
где x, y, x', y' - координаты точек в системе левого и правого снимков;
MOx, MOy, MOp, MOq - координаты и параллаксы главной точки снимков в системе координат прибора;
Ox, Oy, Op, Oq - координаты и параллаксы точек стереопары в системе координат прибора.
Взаимное ориентирование выполняют под условием компланарности соответствующих проектирующих лучей:
Погрешности элементов внутреннего ориентирования вызывают изменения в структуре уравнения (2) . (3)
. (3)
Члены, заключенные в скобки, выражают поправки перспективного характера за несовпадение начала координат с главной точкой снимка. Они вызывают дополнительные наклоны и развороты снимков. Остаточные члены -δx·δy·α, δ
Афинным внешним ориентированием совмещают систему координат модели с системой координат местности и одновременно устраняют суммарные погрешности, вызванные ошибками внутреннего ориентирования и деформацией снимков. Определение элементов афинного преобразования и последующее перевычисление координат выполняют по формулам
Xg = a1 • X + a2 • Y + a3 • Z + a4;
Yg = b1 • X + b2 • Y + b3 • Z + b4; (4)
Zg = c1 • X + c2 • Y + c3 • Z + c4,
где X, Y, Z - координаты точек в системе координат модели;
Xg, Yg, Zg - координаты точек в системе местности;
a1, a2, a3, a4, b1, b2, b3, b4, c1, c2, c3, c4 - элементы афинного внешнего ориентирования.
Оценка способа выполнена на макетных и реальных снимках.
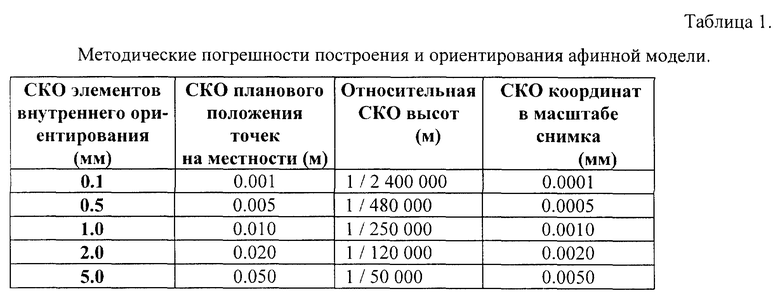
Макетные снимки построены аналитически и соответствуют масштабу 1:10000. В элементы внутреннего ориентирования введены ошибки. Расхождения истинных координат точек на местности и вычисленных в результате ориентирования снимков даны в таблице.
Методические погрешности координат точек, выраженные в масштабе снимка, не превышают ошибок измерения координат на приборе.
Опытно-производстенная проверка способа выполнена по снимкам застроенной территории масштаба 1:7500. Предварительно на местности была выполнена съемка с помощью электронного тахеометра. Повторная съемка произведена по снимкам с помощью стереокомпаратора. Третий вариант съемки выполнен по снимкам с помощью аналитического прибора по методике, аналогичной прототипу. Для сравнения использовано 120 контрольных точек. Средние квадратические расхождения плановых координат, полученные из фотограмметрических и наземных определений, составили 0,25 м как в прототипе, так и в предлагаемом способе.
Способ может быть использован при разработке автоматизированного стереофотограмметрического комплекса на базе стереокомпаратора и ПЭВМ, а также при создании программного обеспечения цифровых фотограмметрических комплексов, предназначенных для создания цифровых карт по материалам наземных и воздушных съемок. На основе способа возможна обработка материалов обзорной аэросъемки, полученных неметрической камерой без предварительной калибровки снимков, а также изображения с переменными элементами внутреннего ориентирования (видеофильмы, цифровые кадры) с учетом параметров приближенной калибровки аппаратуры, погрешности которых могут на два порядка превосходить ошибки измерений.
Используемые источники
1. Буров М.И., Нефедов В.И., Трунин Ю.М., Алешников Э.Ф. К вопросу обработки стереопары проективно преобразованных снимков с неизвестными центрами проектирования // Известия вузов / Геодезия и аэросъемка. - 1975. - N 4.- С. 59 - 65.
2. Лобанов А. Н. Фотограмметрия. - М.: Недра. - 1984. - С. 291 - 292 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ПЛАНОВО-ВЫСОТНОГО ОБОСНОВАНИЯ | 1994 |
|
RU2104488C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ПАРЫ СНИМКОВ | 2001 |
|
RU2177603C1 |
| Способ автоматического создания цифровой модели местности по стереоснимкам | 1991 |
|
SU1793226A1 |
| СПОСОБ СОЗДАНИЯ ОРТОФОТОПЛАНОВ ПО МАТЕРИАЛАМ АЭРОВИДЕОСЪЕМКИ | 2002 |
|
RU2235292C2 |
| СПОСОБ СОВЕРШЕНСТВОВАНИЯ ФОТОТРИАНГУЛЯЦИИ ПРИ СОЗДАНИИ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2023 |
|
RU2835990C2 |
| Способ обновления топографической карты, созданной по аэрофотоснимкам | 1990 |
|
SU1797689A3 |
| Способ определения средней квадратической ошибки пространственных координат точек исследуемого объекта из обработки изображений, полученных разными съемочными камерами с произвольными значениями элементов ориентирования | 2019 |
|
RU2714525C1 |
| СТЕРЕОКОМПАРАТОРii44S»Rf-'iG'^i t^KA | 1971 |
|
SU322616A1 |
| Способ определения координат объекта по стереопаре его снимков и по снимку летательных аппаратов | 2024 |
|
RU2840058C1 |
| Устройство для графической обработки конвергентных узкоугольных снимков | 1988 |
|
SU1589060A1 |
Способ используется в фотограмметрии. Способ позволяет ориентировать пару снимков с учетом приближенных элементов внутреннего ориентирования без предварительной калибровки аппаратуры. Снимки устанавливают в стереокомпараторе и ориентируют на начальных направлениях. При внутреннем ориентировании снимков измерительные марки наводят на главные точки левого и правого снимков, отсчеты на которые используют для приближенного перехода от системы координат прибора в систему координат снимков. Погрешности, вызванные нестрогостью внутреннего ориентирования снимков, учитываются при внешнем ориентировании модели, которые выполняют афинным преобразованием модели объекта. Способ позволяет обрабатывать снимки, полученные неметрическими фотокамерами, а также изображения с переменными элементами внутреннего ориентирования (видеофильмы, цифровые снимки) с погрешностью определения элементов внутреннего ориентирования, превосходящей ошибки измерений на два порядка. 1 табл.
Способ ориентирования пары снимков, включающий внутреннее ориентирование снимков, при котором снимки устанавливают в стереокомпаратор и ориентируют по начальным направлениям, взаимное ориентирование снимков и внешнее ориентирование полученной модели объекта, отличающийся тем, что при внутреннем ориентировании снимков измерительные марки наводят на главные точки левого и правого снимков, отсчеты на которые используют для приближенного перехода от системы координат прибора в систему координат снимков, а внешнее ориентирование выполняют аффинным преобразователем модели объекта.
| Лобанов А.Н | |||
| Фотограмметрия | |||
| - М.: Недра, 1994, с.291-292 | |||
| 0 |
|
SU220521A1 | |
