Изобретение относится к области фотограмметрии и может быть использовано при создании трехмерных цифровых моделей местности, цифровых моделей рельефа (ЦМР), построении цифровых ортофотопланов.
Для реализации способа проводят комплекс работ по аэрофототопографической съемке [1], включающий процесс фотограмметрической обработки данных аэрофотосъемки, которая реализует следующие этапы: подготовительные работы; фототриангуляция; создание ЦМП и ЦМР для ортотрансформирования аэрофотоснимков и/или для отображения рельефа на топографической карте (плане); ортотрансформирование и монтаж ортофотоплана.
Согласно ГОСТ Р 59562-2021. Съемка аэрофототопографическая [1], при выборе и отождествлении связующих точек в процессе фототриангуляции следует следить, чтобы точки были набраны равномерно по площади перекрывающихся частей снимков маршрута и как минимум по две точки в каждой из шести стандартных зон. Общее число связующих точек на стереопару должно быть не менее 20 при выполнении отождествления и измерений координат точек на снимке оператором.
Основными способами отождествления связующих точек, применяемыми в цифровых фотограмметрических системах, являются корреляционно-экстремальные, недостатками которых являются высокая вероятность возможных ошибок, влияние яркостно-геометрических искажений изображений и других факторов, зависящих от условий формирования изображений, а также низкое качество работы на снимках с однородным изображением.
Известен способ автоматического определения одноименных точек для вычисления элементов взаимного ориентирования [2], основанный на анализе структуры изображения, при котором поиск связующих точек осуществляется в дифференциальном анализе всего изображения с целью выявления локальных особенностей. Используя дескрипторы, которые строятся на информации об интенсивности, цвете и текстуре искомой точки и ее окрестности, решается задача сравнения и соответствия найденных точек. Совпадение дескрипторов не является надежным критерием пар соответственных точек, и неизбежно будут возникать ошибочно опознанные, что приведет к дальнейшим погрешностям при решении уравнения взаимного ориентирования. Поэтому следующим этапом при применении данного способа является отбраковка найденных пар связующих точек. Недостатком этого способа является большой процент отбраковки автоматически определенных связующих точек, достигающий 70%. Оставшиеся связующие точки могут группироваться локально в зоне перекрытия, а не в шести стандартных зонах, что приведет к недопустимым погрешностям в вычислении элементов взаимного ориентирования или даже к неопределенности взаимного ориентирования.
Известен способ поиска соответственных точек с учетом влияния изображенного сюжета на качество поиска соответственных точек, выполненного на примере способа Scale-Invariant Feature Transform (SIFT) [3]. Процедура автоматического определения связующих точек основывается на предварительном поиске по изображению особых точек, для выполнения которого применим отдельный класс способов из области технического зрения, например, такие широко применяемые: Speeded Up Robust Features (SURF), Scale-Invariant Feature Transform (SIFT), а также ряд новых разработок: способы Oriented FAST and Rotated BRIEF (ORB) и KAZE, при использовании которых особенности текстуры изображения местности поиска соответственных точек могут обусловливать существенные вариации в распределении выбираемых точек по полю изображения отдельного снимка. Нарушение плотности расположения ключевых точек вызывается неравномерным качеством изображения по полю кадра. Такое явление вызвано дисторсией объектива съемочной камеры, атмосферной рефракцией и т.п., искажающих идеальную центральную проекцию. Недостатком этого способа является большое количество отбракованных точек, которое увеличивается на бестекстурном изображении, таком как водная поверхность, а на стыке двух классов, к примеру водная поверхность и застроенная территория, наибольшее количество отождествленных точек будет сконцентрировано на застроенной территории, что приведет к неравномерности распределения связующих точек по полю снимка. Помимо этого, технологии автоматического отождествления связующих точек не учитывают требования к стационарности объектов местности, а при съемке городских территорий и автомобильных дорог погрешности определения элементов взаимного ориентирования будут возрастать из-за ошибочного отождествления связующих точек, находящихся на движущихся объектах.
Известен способ построения трехмерной модели местности вдоль полотна железнодорожного пути с использованием цифровых снимков с БВС и материалов воздушного лазерного сканирования [4], для реализации которого проводят одновременную плановую аэрофотосъемку и воздушное лазерное сканирование местности с применением летательного аппарата. Получают цифровые аэрофотоснимки и массив точек лазерных отражений местности вдоль линейного объекта. Полученные аэрофотоснимки разбивают по парам, подлежащим взаимному ориентированию, с образованием стереопар, на которых распознают рельсовую колею и определяют расстояния между рельсовыми нитями, по которым вычисляется масштаб изображения местности на снимках. Путем наложения цифровых маркеров на снимки каждой стереопары выполняют взаимное ориентирование снимков с определением элементов их внешнего ориентирования. Значения ЭВО используют для коррекции значений координат массива точек лазерных отражений местности и определения координат этих точек на цифровых снимках. По скорректированным значениям трехмерных координат точек на местности, значениям двухмерных координат этих точек на снимках, а также значениям масштаба изображений местности на снимках формируют трехмерную модель местности. Технический результат - повышение точности характеристик измерений. Недостатками этого способа являются: сложность и значительный вес комплекса аппаратуры, устанавливаемой на летательных аппаратах и ограничивающий применение данного способа на БВС с малой грузоподъемностью; высокая стоимость измерительного комплекса.
Известен алгоритм построения плотного облака точек по стереопаре снимков на основе полуглобального отождествления - Semi-Global Matching (SGM) [5], суть которого заключается в том, чтобы каждому пикселю левого снимка стереопары S1 был найден соответствующий пиксель на правом снимке S2. Причем способ рассчитан на применение трансформированных снимков, т.е. все соответствующие точки находятся вдоль базисных (эпиполярных) линий. Каждый пиксель левого снимка сравнивается со всеми пикселями второго снимка в пределах возможного изменения продольных параллаксов pmax, и каждый раз вычисляется стоимость Схур отождествления. К недостаткам этого способа можно отнести следующее: не в полной мере решается вопрос использования всех снимков, на которых изобразилась данная точка, так как используется только та пара снимков, в которой разность плотностей минимальна для данной точки, что не является оптимальным решением, так как не учитывается геометрия засечек, на одном или нескольких снимках точка может попасть в мертвую зону, что может привести к ложному отождествлению.
Известный способ обнаружения связующих точек с помощью глубокого обучения LR-Superglue [6] включает следующие этапы:
1. Высокоточное вычисление перекрытия исходных стереоизображений с помощью определенного алгоритма сопоставления признаков (например, SIFT или SuperGlue).
2. Блокировка изображения для большого стереоизображения с размером блока 1000×1000 (при достаточном размере графического процессора размер блока может быть до 2000×2000) на основе размера перекрытия в строке (у) или направлении столбца (х).
3. Изменение параметров поиска связующих точек по умолчанию оригинального SuperGlue на основе параметров тестовой модели. Конкретными параметрами являются размер исходного изображения и окна сопоставления.
4. Выполнение сопоставления изображений с помощью улучшенного алгоритма SuperGlue. Если контраст черно-белого изображения недостаточный, можно выполнить процедуру улучшения изображения.
5. Объединение результатов сопоставления блоков и оптимизация начальной точки сопоставления с помощью алгоритма LSM (least squares matching) для обеспечения субпиксельной точности.
Недостатками данного способа являются: необходимость мощных процессоров в составе цифровой фотограмметрической станции; необходимость высокоточного вычисления продольных и поперечных перекрытий снимков; сложность обработки изображений со слабовыраженной текстурой.
Наиболее близким техническим решением к предлагаемому изобретению является способ взаимного ориентирования плановых снимков стереопары [7], который выполняется с использованием 6-ти соответственных точек, расположенных в 6-ти стандартных зонах стереопары, при котором обоснование зон расположения соответственных точек обусловлено выполнением двух требований: 1) определения элементов взаимного ориентирования с максимальной точностью; 2) наиболее простым видом уравнения компланарности для каждой из 6-ти точек, которые используются для вычисления 5-ти искомых элементов взаимного ориентирования. Данный способ использовался для взаимного ориентирования пары снимков на универсальных фотограмметрических приборах, при котором поперечный параллакс устранялся последовательно в 6-ти стандартных зонах, начиная с точек 1 или 2, параллаксы на которых вызваны в основном поворотами  и
и  . К недостаткам этого способа следует отнести: последовательное устранение поперечных параллаксов на 6-ти стандартно расположенных точках, необходимость использования не менее 6-ти соответственных точек в обозначенных зонах.
. К недостаткам этого способа следует отнести: последовательное устранение поперечных параллаксов на 6-ти стандартно расположенных точках, необходимость использования не менее 6-ти соответственных точек в обозначенных зонах.
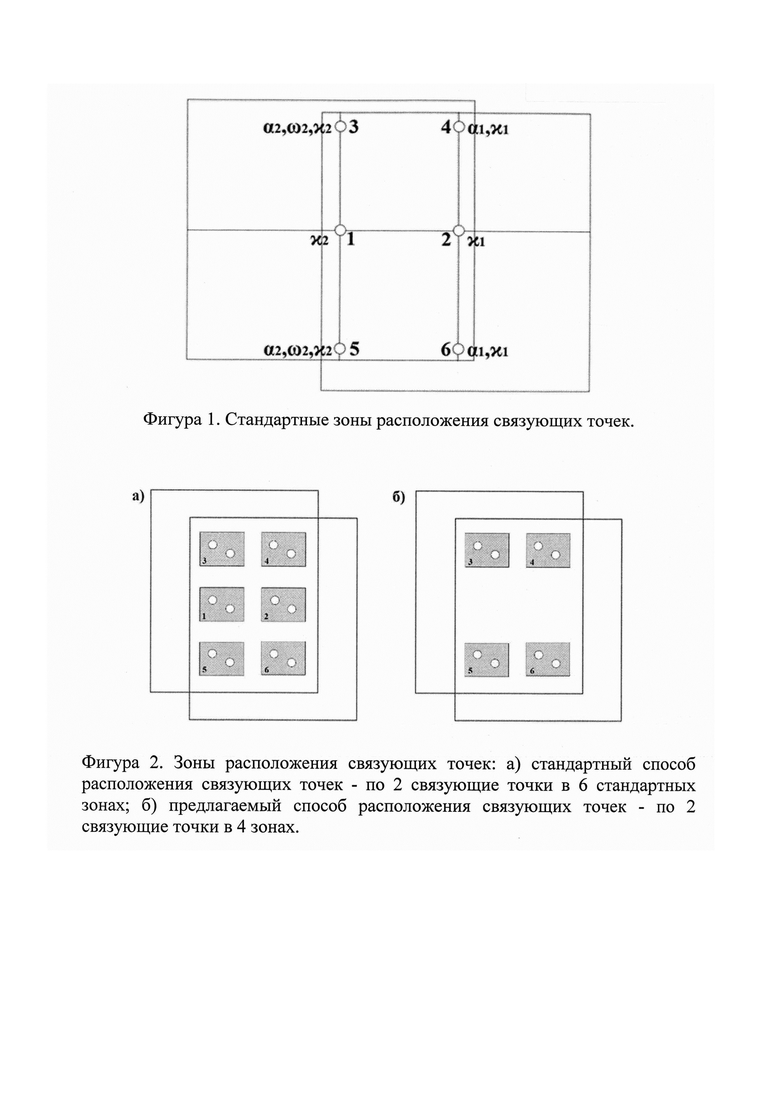
Современные вычислительные комплексы позволяют решать системы линейных уравнений любой сложности, поэтому второе требование вышеуказанного способа взаимного ориентирования плановых снимков стереопары становится необязательным для выполнения. В связи с этим выполнение первого условия в предлагаемом изобретении «Способ совершенствования фототриангуляции при создании цифровых моделей местности» предполагает выбор зон расположения соответственных точек в соответствии с фигурой 1 и таблицей 1.
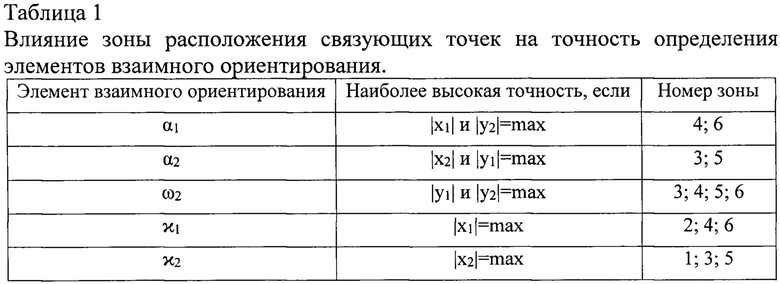
Как видно из таблицы 1, для достижения наивысшей точности определения 5-ти угловых элементов взаимного ориентирования пары снимков связующие точки при взаимном ориентировании плановых снимков стереопары [7] необходимо и достаточно расположить в зонах 3; 4; 5; 6, показанных на фигуре 2б, по две в каждой зоне.
Использование связующих точек в стандартных зонах (1, 2) (фигура 2а) влияет только на точность определения углов разворота левого и правого снимков ( и
и  ); в зонах (3, 5) позволяет определить угол
); в зонах (3, 5) позволяет определить угол  с максимальной точностью, а в зонах (4, 6) - с максимальной точностью угол
с максимальной точностью, а в зонах (4, 6) - с максимальной точностью угол  , в результате чего установлено, что: 1) из обработки можно исключить связующие точки в зонах (1, 2), так как они не оказывают существенного влияния на точность определения углов и при использовании точек в зонах (3, 4, 5, 6); 2) пять угловых элементов взаимного ориентирования будут определены с максимальной точностью при расположении 8 связующих точек в зонах, показанных на фигуре 2б.
, в результате чего установлено, что: 1) из обработки можно исключить связующие точки в зонах (1, 2), так как они не оказывают существенного влияния на точность определения углов и при использовании точек в зонах (3, 4, 5, 6); 2) пять угловых элементов взаимного ориентирования будут определены с максимальной точностью при расположении 8 связующих точек в зонах, показанных на фигуре 2б.
Цель предлагаемого изобретения - совершенствование этапа построения и уравнивания фототриангуляции в технологии создания цифровых моделей местности требуемой точности фотограмметрическим методом.
Для достижения поставленной цели решена техническая задача и разработан способ совершенствования фототриангуляции при создании цифровых моделей местности, позволяющий при уравнивании маршрутной фототриангуляции способом независимых моделей определять: 1) элементы взаимного ориентирования с помощью уравнений компланарности, 2) углы наклона (α1, α2, ω2) левого и правого снимков в базисной системе координат с максимальной точностью при использовании связующих точек, расположенных в углах стереопары в зонах (3; 4; 5; 6), показанных на фигуре 2а, для чего получают цифровые аэрофотоснимки (АФС), которые разбивают на стереопары, подлежащие взаимному ориентированию, определяют элементы взаимного ориентирования снимков стереопары, отличающийся от прототипов тем, что при создании цифровых моделей местности на этапе фототриангуляции взаимное ориентирование снимков каждой стереопары и построение геометрической модели местности производится с использованием соответственных точек, расположенных в 4-х стандартных зонах в углах каждой стереопары по две в каждой зоне при измерении координат указанных точек в ручном режиме.
Технический результат - повышение быстродействия фотограмметрической обработки снимков на этапе фототриангуляции для создания цифровых моделей местности при использовании программ классической фотограмметрической обработки кадровых снимков, таких как PHOTOMOD, ЦФС-Талка, Leica Photogrammetry Suite, ImageStation и др., где поиск связующих точек осуществляется оператором в ручном режиме.
Положительный эффект от внедрения в производство предлагаемого изобретения проявляется в двух сферах:
1. Экономическая:
- повышение эффективности при выполнении фотограмметрических построений требуемой точности по снимкам маршрутной и площадной съемки;
- сокращение в 1,5 раза временных и трудовых затрат без потери точности конечной продукции на поиск, отождествление и измерение координат связующих точек на этапе фототриангуляции в связи с уменьшением связующих точек и оптимизации зон их размещения.
2. Социальная:
- улучшение условий труда за счет сокращения трудоемких работ по поиску, отождествлению и измерению координат связующих точек в ручном режиме.
Источники информации
1. ГОСТ Р 59562-2021. Съемка аэрофототопографическая.
2. Соловьев А.В. Метод автоматического определения одноименных точек для вычисления элементов взаимного ориентирования // Известия высших учебных заведений. Геодезия и аэрофотосъемка. - 2017. - №. 1. - С. 40-44.
3. Алтухов А.И., Билан В.И., Григорьев А.Н., Попович В.В. Методика и частные результаты исследования качества поиска ключевых точек по материалам оптико-электронной аэросъемки // Научно-технический вестник информационных технологий, механики и оптики. - 2020. - Т. 20. - №. 5. - С. 649-660.
4. Патент RU 2726256 С1.
5. Чибуничев А.Г., Михайлов А.П., Старшов В.В. Автоматическое построение плотного облака точек по множеству снимков на основе полуглобального метода отождествления соответственных точек // Известия высших учебных заведений. Геодезия и аэрофотосъемка. - 2015. - №. 2. - С. 14-18.
6. Yuan X. et al. Large Aerial Image Tie Point Matching in Real and Difficult Survey Areas via Deep Learning Method // Remote Sensing. - 2022. - T. 14. - №. 16. - C. 3907.
7. Лобанов A.H. Фотограмметрия: Учебник для вузов. 2-е изд., перераб. и доп. - М., Недра, 1984, 552 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обновления топографической карты, созданной по аэрофотоснимкам | 1990 |
|
SU1797689A3 |
| СПОСОБ СОЗДАНИЯ ПЛАНОВО-ВЫСОТНОГО ОБОСНОВАНИЯ | 1994 |
|
RU2104488C1 |
| СПОСОБ СОЗДАНИЯ ОРТОФОТОПЛАНОВ ПО МАТЕРИАЛАМ АЭРОВИДЕОСЪЕМКИ | 2002 |
|
RU2235292C2 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| Способ определения координат точек местности | 1977 |
|
SU705257A1 |
| Способ автоматического создания цифровой модели местности по стереоснимкам | 1991 |
|
SU1793226A1 |
| Способ обновления карты,созданной по аэрофотоснимкам | 1984 |
|
SU1216648A1 |
| Способ построения трехмерной модели местности вдоль полотна железнодорожного пути | 2020 |
|
RU2726256C1 |
| СПОСОБ АНАЛИТИЧЕСКОГО ОРИЕНТИРОВАНИЯ ПАРЫ АЭРОСНИМКОВ | 1997 |
|
RU2125709C1 |
Изобретение относится к области фотограмметрии и касается способа фототриангуляции при создании цифровых моделей местности с уменьшенным количеством зон расположения связующих точек. Способ заключается в построении геометрической модели в результате взаимного ориентирования снимков стереопары. При этом связующие точки располагают в четырех стандартных зонах, в углах стереопары по две в каждой зоне, для которых абсолютные значения координат на снимках максимальны. Технический результат заключается в ускорении фотограмметрической обработки снимков на этапе фототриангуляции. 3 ил., 1 табл.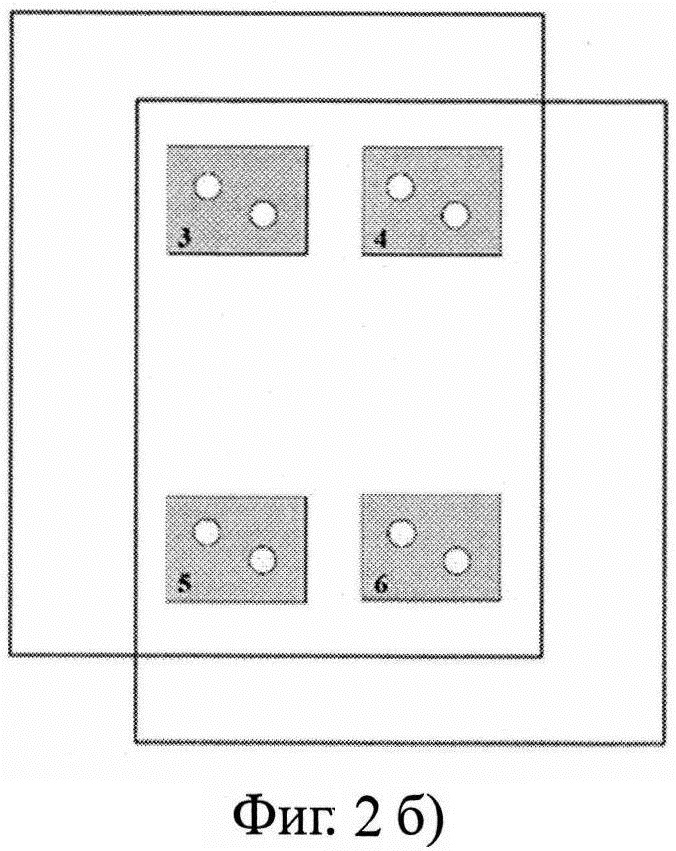
Способ фототриангуляции при создании цифровых моделей местности с уменьшенным количеством зон расположения связующих точек, заключающийся в построении геометрической модели в результате взаимного ориентирования снимков стереопары и отличающийся тем, что связующие точки располагают в четырех стандартных зонах, в углах стереопары по две в каждой зоне, для которых абсолютные значения координат на снимках максимальны.
| Ледогенератор снежного льда | 1939 |
|
SU59562A1 |
| Съемка аэрофототопографическая | |||
| Технические требования, М., СТАНДАРТИНФОРМ, 2021 г. | |||
| Чибуничев А.Г | |||
| Фотограмметрия: учебник для вузов, М.: Изд | |||
| МИИГАиК, 2022 г | |||
| US 2021264666 A1, 26.08.2021 | |||
| СПОСОБ АКТУАЛИЗАЦИИ ЦИФРОВЫХ КАРТ МЕСТНОСТИ | 1999 |
|
RU2165596C1 |

