Изобретение относится к радионавигации и может быть использовано для решения различных навигационных задач методами относительных определений на динамических объектах (например, летательных аппаратах).
Известен способ навигационных определений [1], включающий радионавигационные излучающие станции, одна из которых ведущая, потребитель навигационной информации. Недостатками известного способа являются относительно низкая точность определения местоположения потребителя, сложный вычислительный алгоритм разрешения неоднозначности определения его координат, невозможность использования для орбитальных летательных аппаратов (ЛА).
Наиболее близким по физической сущности является способ навигационных определений [2] , при котором в отдельный момент времени t измеряются m псевдодальностей (квазидальностей) от потребителя навигационной информации (П) до m видимых навигационных космических аппаратов (НКА), путем измерения времени запаздывания огибающих составляющих навигационных сигналов НКА  излученных в моменты времени, фиксируемые по бортовым, взаимно синхронизированным часам НКА и принятым в момент времени t, фиксируемый по бортовым часам потребителя, координаты которого для момента времени t определяются итерационно по методу наименьших квадратов (МНК) в соответствии с выражениями
излученных в моменты времени, фиксируемые по бортовым, взаимно синхронизированным часам НКА и принятым в момент времени t, фиксируемый по бортовым часам потребителя, координаты которого для момента времени t определяются итерационно по методу наименьших квадратов (МНК) в соответствии с выражениями
где ξ
dj - оценка поправки (разности псевдодальностей и истинных дальностей), обусловленная разностью хода бортовых часов НКА и потребителя (поправка к дальности, одинаковая для всех НКА), вычисленная на j-м шаге итерации;
Δdj - соответствующее приращение поправки к дальностям.
Приращения оценок координат
и поправок к дальностям
Здесь (cτi-D весовые коэффициенты МНК, полученные по результатам вычислений на предыдущем (j-1)-м шаге итерации;
весовые коэффициенты МНК, полученные по результатам вычислений на предыдущем (j-1)-м шаге итерации;
Di j-1 - оценка псевдодальности от потребителя до i-го НКА, полученная по результатам вычислений на (j-1)-м шаге итерации,
где ξli, l = 1,2,3 - известные для момента времени t координаты i-го НКА (эфемериды).
Весовые коэффициенты являются элементами весовой матрицы на (j-1)-м шаге итерации
Cj-1= ((Aj-1)тAj-1)-1(Aj-1)т, (4)
где Aj-1 - матрица частных производных псевдодальностей по координатам и подставке, вычисленных на (j-1)-м шаге итерации
Причем
В качестве первого приближения (j-1) можно брать x(0) = 0, y(0) = 0, z(0) = 0 - координаты центра Земли.
Недостатком известного способа является высокий уровень случайной и систематической составляющих погрешностей оценивания координат потребителя.
Целью изобретения является повышение точности навигационных определений.
Существенные отличия предлагаемого способа навигационных определений по интегральным параметрам от способа-прототипа заключаются в следующем. В известном способе навигационных определений координаты потребителя навигационной информации определяются итерационно по МНК на основе измерения псевдодальностей до m видимых НКА, путем определения времени запаздывания огибающих составаляющих навигационных сигналов НКА, а временная поправка определяется как одинаковая для всех m НКА. Далее рассчитываются матрицы Aj-1 частных производных (5), весовые коэффициенты (4), поправки (2) и (1) и, наконец, параметры состояния П (оценки его координат). Однако данный способ хараткеризуется высоким уровнем случайной и систематической составляющих погрешностей оценивания координат потребителя.
В предложенном способе помимо определения времен запаздывания огибающих навигационных сигналов τi, начиная с момента t0, производятся измерения интегральных параметров (приращений псевдодальностей) до m НКА на несущих составляющих навигационных сигналов и формирование измерений псевдодальностей как сумм измерений псевдодальностей в начальный момент времени с использованием огибающих составляющих навигационных сигналов и измерений приращений псевдодальностей с использованием несущих составляющих навигационных сигналов, а временные поправки к измерениям псевдодальностей определяются по каждому видимому НКА.
Дисперсия погрешности комбинированного измерения псевдодальности не зависит от величины интервала интегрирования псевдоскорости и в предположении постоянства дисперсий погрешностей измерений на интервале интегрирования, а также равенства дисперсий погрешностей измерений относительно различных НКА, определяется выражением
σ
где σ
Коэффициент корреляции двух комбинированных измерений псевдодальности в разные моменты времени i, j равен
rD(j,i) = (1+0,5σ
Для выполняющегося на практике соотношения дисперсий σ
Корреляционная матрица погрешностей измерений псевдодальностей относительно m НКА для n моментов времени имеет вид
KD= (σ
где матрицы J и I размера mn x mn, причем I - единичная матрица,
J - клеточно-диагональная матрица с клетками размера n x n, составленными из единиц.
Геометрическая интерпретация реализации предлагаемого способа пояснена на фиг. 1.
Она содержит систему 1 из m навигационных космических аппаратов, потребитель 2 навигационной информации от начального момента времени обсервации - 21 до конечного n-го - 2n.
В каждый  момент времени потребитель 2k взаимодействует с системой 1 из m НКА, определяя свои координаты на момент времени tn.
момент времени потребитель 2k взаимодействует с системой 1 из m НКА, определяя свои координаты на момент времени tn.
Сущность предложенного способа состоит в следующем. Пусть имеется система 1 навигационных космических аппаратов (НКА). В момент времени t0 измеряются m псевдодальностей от потребителя 21 до m НКА путем измерения времени запаздывания огибающих составляющих навигационных сигналов НКА  излученных в моменты времени, фиксируемые по бортовым, взаимно синхронизированным часам НКА и принятым в момент времени t, фиксируемый по бортовым часам потребителя 21.
излученных в моменты времени, фиксируемые по бортовым, взаимно синхронизированным часам НКА и принятым в момент времени t, фиксируемый по бортовым часам потребителя 21.
Помимо этого, начиная с момента t0, производятся измерения приращений дальностей до 11. ..1m НКА на несущих составляющих навигационных сигналов, путем подсчета числа периодов принятых сигналов n счетчиками частоты по каждому сигналу на мерных интервалах [t1-t0],...,[tn-t0], по мере прохождения П через состояния 21,...,2n по формуле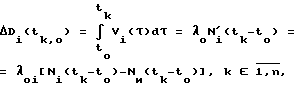
где Ni(tk-t0) - число принятого сигнала, фаза которого с несущего сигнала частоты f0i путем преобразования переносится на измерительный сигнал частоты fи. Частота сигнала, поступающего на измеритель,
fni = fи ± Fдi
где FДi - допплеровская частота, Fдi= ∓ Vi/λoi;
Vi = dDi/dt - радиальная скорость потребителя относительно i-го НКА;
λoi - длина волны несущего сигнала, излучаемого i-м НКА;
Nи(tk-t0) - число периодов измерительного сигнала при нулевой допплеровской частоте.
Инструментальная погрешность измерения приращения дальности таким способом не превосходит длины волны несущего сигнала λoi.
Далее координаты потребителя 2n в момент tn (или в предшествующие моменты времени) определяются итерационно методом наименьших квадратов по следующим выражениям: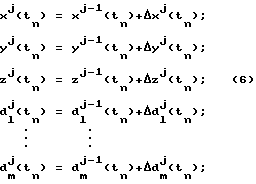
где xj, yj, zj - оценки координат, определяемые на j-м шаге итерационного процесса;
Δ
d
Прием
где l = 1, 2, 3; ξ1= x, ξ2= y, ξ3= z;
Здесь D
Весовые коэффициенты  являются элементами весовой матрицы на (j-1)-м шаге итерации
являются элементами весовой матрицы на (j-1)-м шаге итерации
где Aj-1(tn) - матрица частных производных псевдодальностей по координатам и поправкам, вычисленных на (j-1)-м шаге итерации, вычисленных на интервале [t0, tn] в потребителя 2n навигационной информации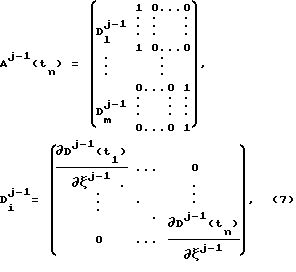
причем диагональные элементы матрицы D момента времени
момента времени
Из условий несмещенности Cj-1(tn)Aj-1(tn) = I, а также в силу специфики матрицы Aj-1(tn), в которой последние столбцы содержат единицы и нули, получим
Поскольку в корреляционной матрице погрешностей измерений каждый ее элемент содержит дисперсию определения дальностей в момент времени t0, то в силу (8) дисперсия оценки отдельной координаты в момент tn не будет зависеть от дисперсии оценки дальности, измеренной на огибающей в момент t0, а будет определяться только дисперсиями погрешностей определения параметров на несущей частоте:
В отличие от прототипа, систематическая составляющая погрешности оценки отдельной координаты потребителя не зависит от постоянных на интервале интегрирования систематических погрешностей измерений псевдодальностей и равна
где  скорость изменения систематической составляющей погрешности измерения псевдодальности до i-го НКА. Выражение справедливо при линейном характере изменения во времени на интервале интегрирования систематических составляющих погрешностей измерений псевдодальностей.
скорость изменения систематической составляющей погрешности измерения псевдодальности до i-го НКА. Выражение справедливо при линейном характере изменения во времени на интервале интегрирования систематических составляющих погрешностей измерений псевдодальностей.
Эффективность предлагаемого способа навигационных определений проанализируем на основе расчета составляющих погрешностей оценок отдельных координат для следующего случая навигационных определений.
Пусть потребитель (например, низкоорбитальный спутник связи) движется по круговой орбите с известной высотой h' в плоскости круговой орбиты с высотой H' двух НКА. Определяемой координатой является линейное положение потребителя на орбите - L. Для навигационного определения предлагаемым способом достаточно двух моментов времени интегрирования t1 и t2. Пусть t1 = t0 и в этот момент времени первый НКА (11) находится в зените потребителя (21), а в момент времени t2 в зените потребителя (22) находится второй НКА.
В рассматриваемом случае выражения для среднего квадратического отклонения (СКО) случайной составляющей погрешности оценки координаты потребителя, а также систематической погрешности имеют вид
где t2 = t1 + Tи, Tи - время интегрирования;
H = H' + R3, h = h' + R3, R3 - радиус Земли;
ψ1(t2) - угловое положение первого НКА на орбите в моменты времени t2;
ψ(t2) - угловое положение потребителя на орбите в момент времени t2,
где Tн и Tп - периоды обращения НКА и потребителя,
причем
Здесь μ = 3,986 • 105 км3/с2 - гравитационный параметр Земли.
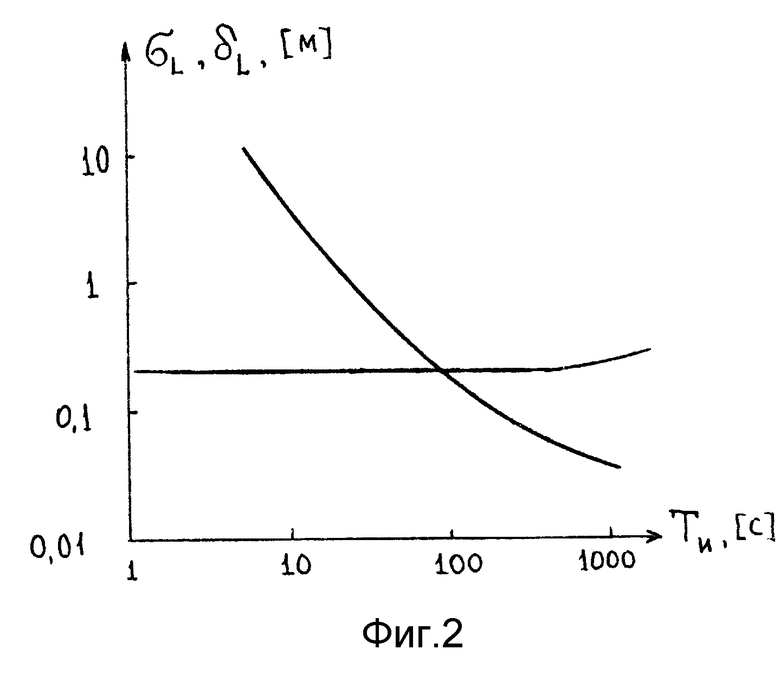
Зависимости σL(t2) и δL(t2) при H' = 20000 км и h' = 300 км от времени интегрирования Tи приведены в логарифмическом масштабе на фиг. 2 для значений σDн = 0,02 м и  3 • 10-4 м/с, вполне приемлемых для существующей практики навигационных определений. Из анализа графика видно, что для времени интегрирования Tи > 25 с составляющие погрешности навигационных определений становятся меньше 1 м.
3 • 10-4 м/с, вполне приемлемых для существующей практики навигационных определений. Из анализа графика видно, что для времени интегрирования Tи > 25 с составляющие погрешности навигационных определений становятся меньше 1 м.
Для неподвижного потребителя при σDн = 0,02 м и  3 • 10-5 м/с на интервале интегрирования Tи = 6156 с при остальных прочих условиях рассматриваемого примера σL≈ 0,03 м, δL= 0,24 м.
3 • 10-5 м/с на интервале интегрирования Tи = 6156 с при остальных прочих условиях рассматриваемого примера σL≈ 0,03 м, δL= 0,24 м.
Таким образом, предлагаемый способ навигационных определений по интегральным параметрам позволяет на порядок и более повысить точность решаемой задачи по сравнению с прототипом.
Отличительные признаки предложенного способа:
измеряются m псевдодальностей от потребителя навигационной информации до m НКА путем измерения времени запаздывания огибающих составляющих навигационных сигналов;
измеряются интегральные параметры (приращения псевдодальностей до m НКА), начиная с момента t0, на несущей составляющей навигационного сигнала на n мерных интервалах [t1-t0],...,[tn-t0];
определяются временные поправки к измерениям псевдодальностей относительно всех m НКА;
итерационно по методу наименьших квадратов рассчитываются координаты потребителя навигационной информации (6) для n моментов времени.
Таким образом, предложенный способ навигационных определений по интегральным параметрам обладает новизной, промышленно применим и соответствует критерию "изобретательский уровень", т.к. поиск в смежных областях техники не позволил выявить отличительные признаки заявленного технического решения.
Источники информации
1. Цифровые радионавигационные устройства /Под ред. В.Б. Смолова. М.: Сов. радио, 1980, с. 17 - 19.
2. Сетевые спутниковые радионавигационные системы/ В.С. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич. М.: Радио и связь, 1982, с. 136 - 145.
Изобретение относится к радионавигации и может быть использовано для решения различных навигационных задач методами относительных определений на динамических объектах (например, летательных аппаратах). Содержит систему из m навигационных космических аппаратов, потребитель навигационной информации от начального момента времени обсервации - 21 до конечного n-го - 2 n. Отличительные признаки предложенного способа: измеряются m псевдодальностей от потребителя навигационной информации до m НКА путем измерения времени запаздывания огибающих составляющих навигационных сигналов; измеряются интегральные параметры (приращения псевдодальностей до m НКА), начиная с момента t0, на несущей составляющей навигационного сигнала на n мерных интервалах (t1-t0),.....,(tn-t0); определяются временные поправки к измерениям псевдодальностей относительно всех m НКА; интерационно по методу наименьших квадратов рассчитываются координаты потребителя навигационной информации для n моментов времени, что и является достигаемым техническим результатом. 2 ил.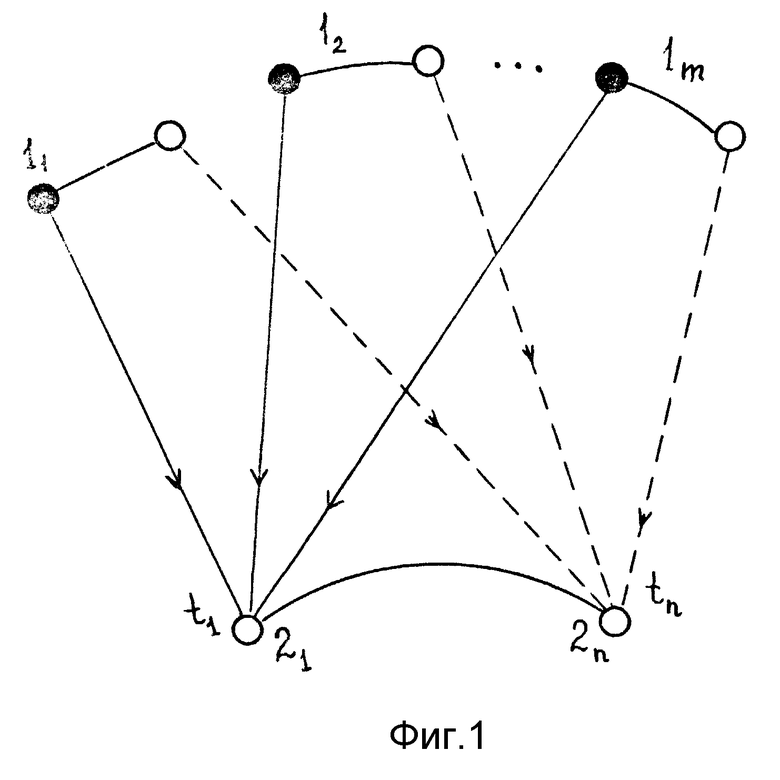
Способ навигационных определений по интегральным параметрам, при котором на борту потребителя навигационной информации (НИ) определяется время запаздывания огибающих составляющих навигационных сигналов от m навигационных космических аппаратов (НКА) на начальный момент времени, вычисляются невязки измерения путем вычитания из произведения времени запаздывания на скорость света оценок псевдодальностей между потребителем НИ и каждым НКА, оценки псевдодальностей определяются путем суммирования корня квадратного из суммы квадратов разностей между текущими координатами НКА и их координатами на (j - 1)-м шаге итерации и оценки поправки, обусловленной разностью хода часов НКА и потребителя, вычисляемой как сумма оценки поправки на предыдущем шаге итерации и суммы по числу видимых m НКА произведений соответствующих весовых коэффициентов и невязок измерений от каждого НКА, причем весовые коэффициенты на (j - 1)-м шаге вычисляются в соответствии с выражением
Cj-1=[(Aj-1)T Aj-1]-1(Aj-1)T,
в котором символ "т" означает транспонирование матрицы;
"-1" - обращение матрицы,
причем элементы матрицы частных производных псевдодальностей по координатам Aj-1 определяются как отношение приращения соответствующей координаты к оценке псевдодальности на (j - 1)-м шаге, координаты потребителя вычисляются итерационно в виде суммы предыдущего измерения или начального значения и приращений, определяемых суммой по числу видимых НКА произведений весовых коэффициентов на соответствующие невязки, отличающийся тем, что дополнительно измеряются интегральные параметры - приращения псевдодальностей на n интервалах времени, как произведения соответствующих длин волн несущего сигнала, излучаемого НКА, на разность между числом периодов принятого сигнала и числом периодов измерительного сигнала при нулевой частоте Доплера, для каждого из n интервала времени интегральные параметры суммируются с невязками по соответствующему НКА и умножаются на весовые коэффициенты, причем матрицы частных производных являются диагональными матрицами, элемент каждой из которых есть матрица частных производных Cj-1, вычисленная для всех n интервалов времени.
| Шебшаевич С.В., Дмитриев П.П., Иванцевич Н.В | |||
| Сетевые спутниковые радионавигационные системы | |||
| - М.: Радио и связь, 1982, с | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| US 5488378 A, 30.06.96 | |||
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ ПАНЕЛЕЙ ИЗ СТЕКЛОПЛАСТИКА | 0 |
|
SU199380A1 |
| СПОСОБ КОМПЕНСАЦИИ СДВИГА ЧАСТОТЫ СИГНАЛА С НЕИЗВЕСТНОЙ НАЧАЛЬНОЙ ФАЗОЙ | 1990 |
|
RU2012011C1 |
