Изобретение относится к сельскому хозяйству, в частности к манипуляторам доения.
Известны манипуляторы доения, включающие датчик, блок управления и исполнительный механизм [1].
Указанные манипуляторы доения сложны по конструкции и надежны в эксплуатации.
Наиболее близким решением по технической сущности и достигаемому результату к предлагаемому техническому решению, его прототипом, является манипулятор доения, включающий в качестве основных узлов автомат управления, исполнительный механизм и гибкую подвеску [2].
Недостатком указанного манипулятора является то, что исполнительный механизм, выполненный в виде гофрированного шланга, один конец которого прикреплен к коллектору доильного аппарата, а другой при доении должен прикрепляться к полу стойла или боковым стойкам (ограждениям) стойлового оборудования, создает громоздкость и неудобство в эксплуатации.
То же самое можно сказать и в отношении гибкой подвески, один конец которой закреплен на коллекторе, а другой - при доении должен прикрепляться с помощью специальных захватов к натянутой поперек стойл струне (проволоке, тросу и др.).
Если же закрепить гибкую подвеску на теле животного, то, чтобы доильный аппарат мог висеть на подвеске, ее необходимо опоясывать вокруг тела животного, что довольно сложно и неудобно. Поэтому манипуляторы такого типа могут применяться в основном для доения коров на доильных площадках или доильных установках в качестве стационарных устройств.
Кроме того, автомат управления, выполненный на базе серийного поплавкового пневмодатчика с логическим элементом ИЛИ, или без него, и включающий корпус, внутри которого движется шток, загруженный снаружи подведенными к нему штангами, снижает эксплуатационную надежность манипулятора из-за дополнительного воздействия шлангов своим весом на работу поплавкового пневмодатчика.
Целью изобретения является повышение удобства и надежности в эксплуатации.
Поставленная цель достигается тем, что в манипуляторе доения, включающем в качестве основных узлов автомат управления, исполнительный механизм и подвеску, последняя выполнена в виде дуги с элементами копирования поперечного профиля тела животного, один конец которой соединен с исполнительным механизмом, а другой - свободный - в целях безопасности обслуживания животных, выполнен в виде округлой бобышки.
Исполнительный механизм выполнен в виде заключенной в ограждение гофрированной трубки, прикрепленной одним концом к верхней торцевой части ограждения, а другим - с помощью гибкой тяги, размещенной в U-образной направляющей, - к коллектору доильного аппарата. При этом один конец U-образной направляющей прикреплен к нижней торцевой части ограждения гофрированной трубки, а над другим расположено прикрепленное к ограждению с помощью кронштейна улавливающее доильные стаканы кольцо.
Для лучшей самоустановки и фиксации подвески на теле животного подвеска смонтирована с исполнительным механизмом таким образом, что центр тяжести устройства расположен в вертикальной плоскости продольной оси симметрии животного.
С целью регулирования установки доильного аппарата по высоте из-за неодинаковой высоты расположения вымени у животных в силу таких факторов как порода, возраст и др., подвеска соединена с исполнительным механизмом посредством быстродействующей телескопической связи, включающей герметично смонтированную на исполнительном механизме втулку и расположенный в ней с возможностью перемещения выполненный прямолинейным конец дуги подвески, причем нижний конец втулки размещен внутри гофрированной трубки на участке сжатых гофр, занимаемом гофрами в результате сжатия гофрированной трубки, и заглушен, а верхний конец втулки - открытый - выступает над верхней торцевой частью ограждения гофрированной трубки и снабжен фиксатором хода подвески в виде стопорного винта с поворотной ручкой.
С целью повышения удобства обслуживания животных и эксплуатационной надежности автомата управления путем "разгрузки" штока поплавкового пневмодатчика от шлангов, соединявших головку штока с исполнительным механизмом, и избавления от трудновыполнимых продольных отверстий в штоке, в корпусе, в котором расположен шток, выполнены две изолированные одна от другой посредством разделяющей их перемычки камеры: верхняя и нижняя, причем верхняя камера соединена с вакуумпроводом, а нижняя - с исполнительным механизмом, а на штоке выполнена проточка, ширина которой превышает высоту разделяющей перемычки между камерами, при этом сам автомат управления смонтирован на ручке доильной аппаратуры.
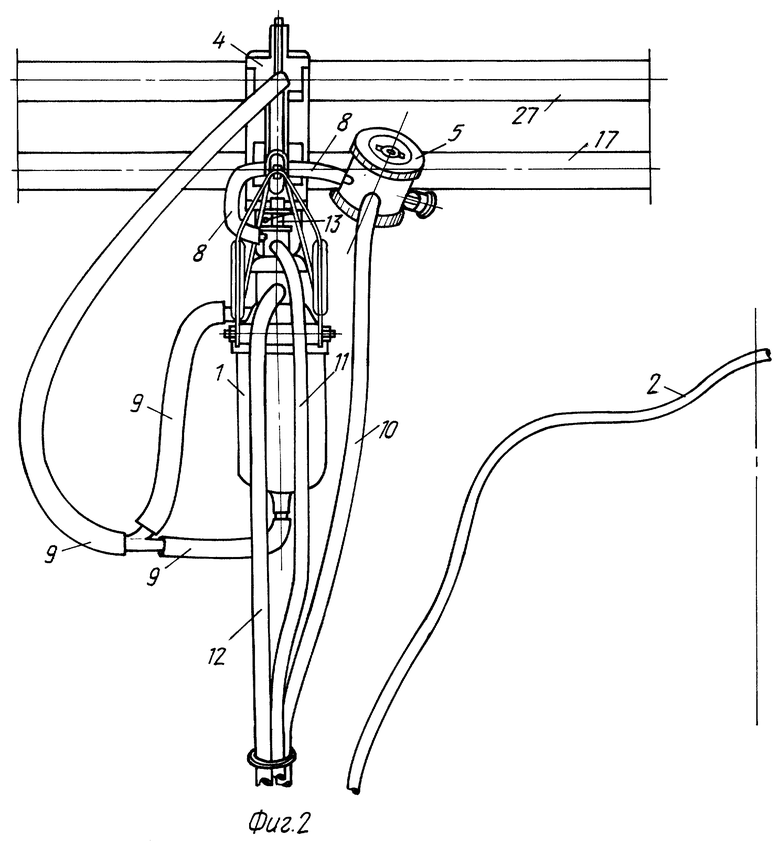
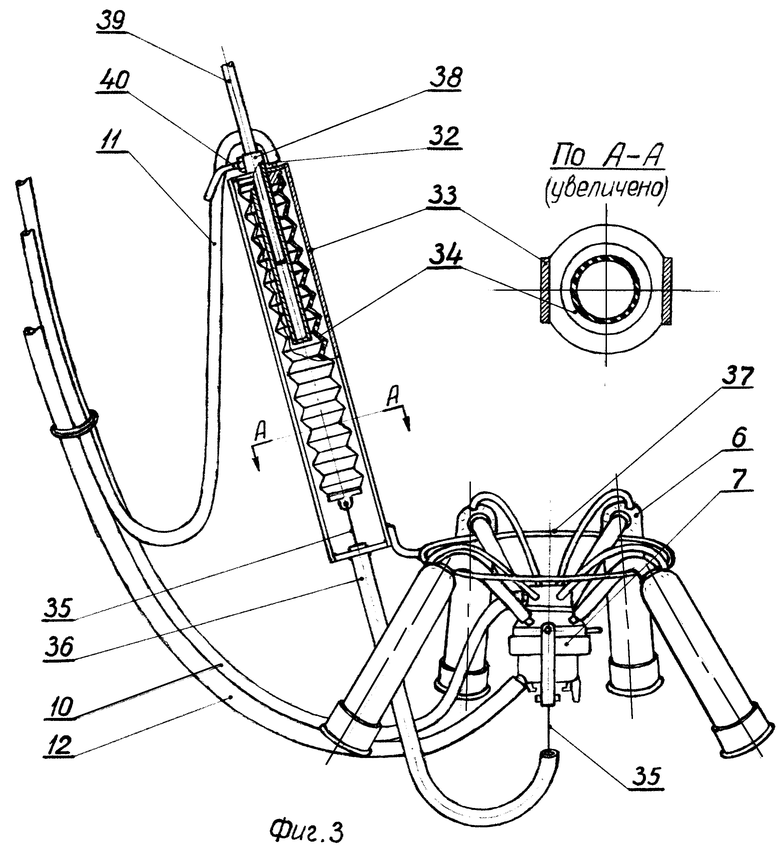
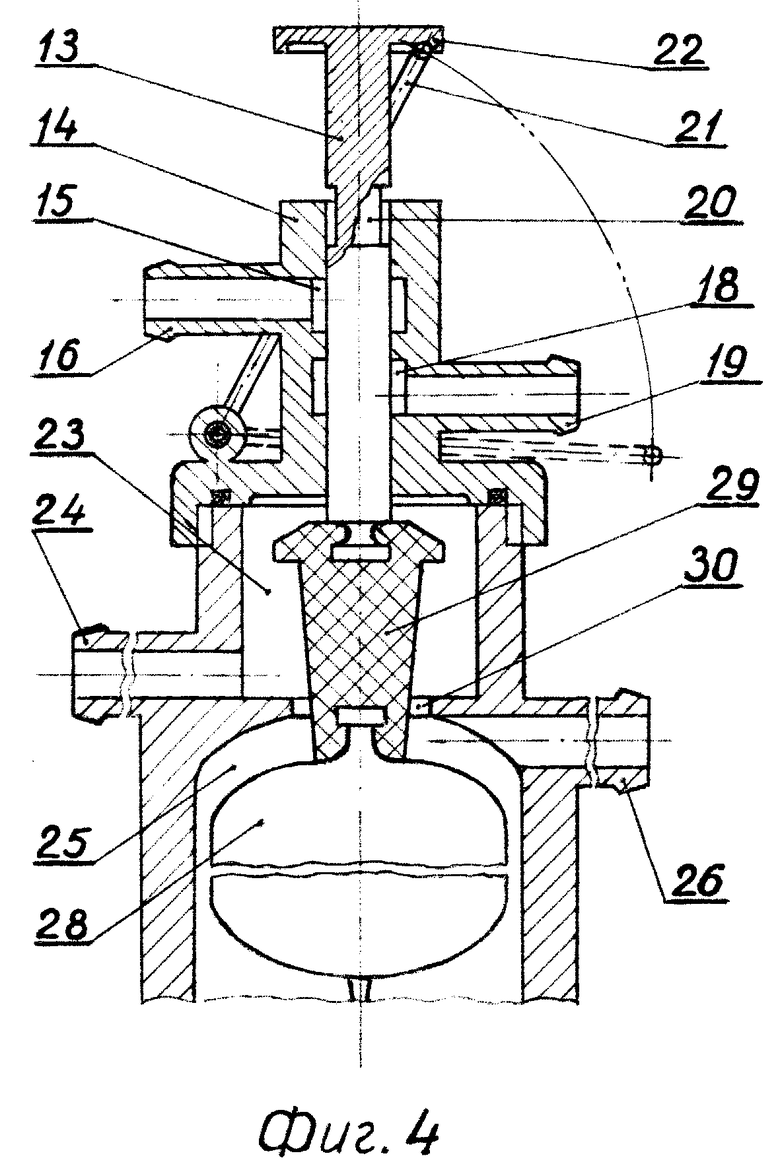
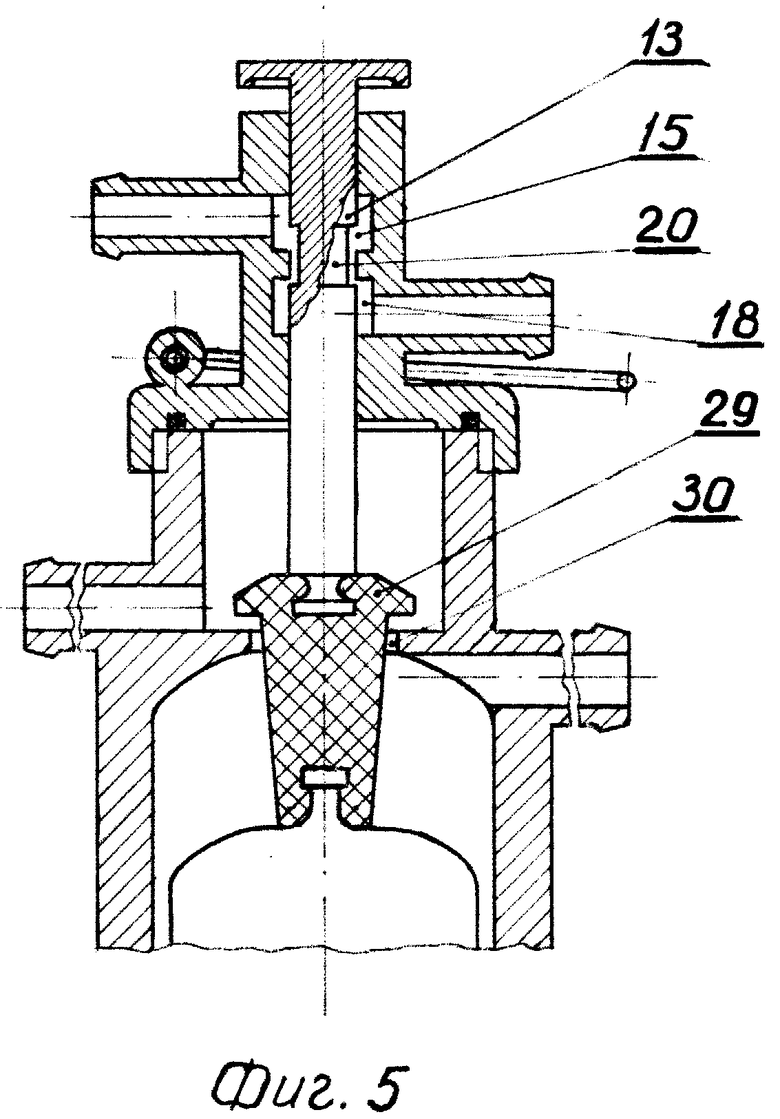
На фиг. 1 изображен общий вид предложенного манипулятора. На фиг. 2 - автомат управления доением. На фиг. 3 - исполнительный механизм с доильным аппаратом и улавливающим доильные стаканы кольцом, связь подвески с исполнительным механизмом. На фиг. 4, 5 и 6 - схемы работы автомата управления с "разгруженным" штоком.
Манипулятор доения включает: автомат управления 1 (фиг. 1, 2), подвеску 2, исполнительный механизм 3 (фиг. 1, 3) и доильную аппаратуру, включающую ручку 4 (фиг. 1, 2), пульсатор 5, доильный аппарат с доильными стаканами 6 (фиг. 1, 3) и коллектором 7 и соединительные вакуумные и молочные шланги: магистральный вакуумный шланг 8 (фиг. 1, 2), магистральный молочный шланг 9, шланг переменного вакуума 10 (фиг. 1, 3), шланг периодического вакуума 11 и молочный шланг 12.
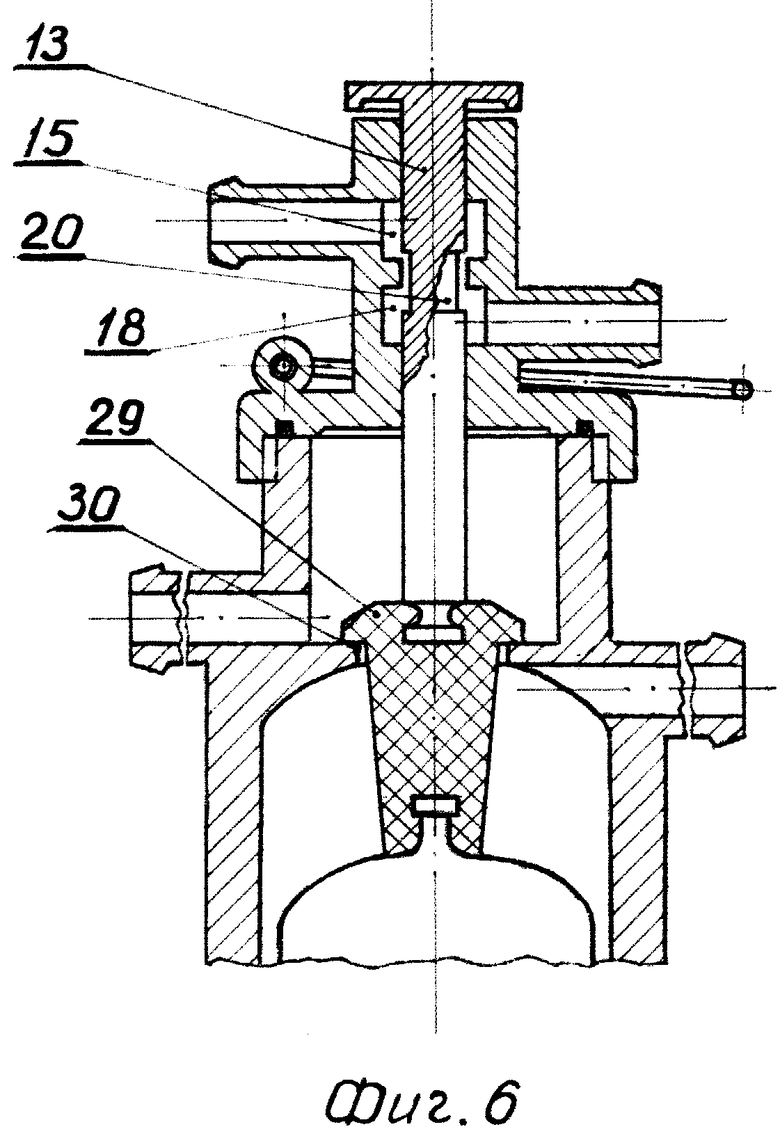
В состав узлов входят следующие детали: 13 - шток автомата управления (фиг. 2, 4 - 6), 14 - корпус штока автомата управления (фиг. 4), 15 - верхняя вакуумная камера, 16 - вакуумный патрубок верхней вакуумной камеры, 17 - вакуумпровод (фиг. 1, 2), 18 - нижняя вакуумная камера (фиг. 4), 19 - вакуумный патрубок нижней вакуумной камеры, 20 - проточка штока, 21 - скоба, 22 - головка штока, 23 - верхняя молочная камера, 24 - молочный патрубок верхней молочной камеры, 25 - нижняя молочная камера, 26 - молочный патрубок нижней молочной камеры, 27 - молокопровод (фиг. 1, 2), 28 - поплавок (фиг. 4), 29 - клапан, 30 - направляющее гнездо клапана, 31 - округлая бобышка свободного конца дуги подвеска (фиг. 1), 32 - быстродействующая телескопическая связь подвески с исполнительным механизмом (фиг. 1, 3), 33 - ограждение гофрированной трубки, 34 - гофрированная трубка, 35 - гибкая тяга, 36 - U-образная направляющая гибкой тяги, 37 - улавливатель доильных стаканов; детали быстродействующей телескопической связи: 38 - втулка, 39 - прямолинейный конец дуги подвески, 40 - фиксатор хода подвески (стопорный винт).
Автомат управления 1 (фиг. 1, 2) выполнен в виде поплавкового пневмодатчика, включающего шток 13 (фиг. 2, 4), расположенный в корпусе 14 (фиг. 4), имеющем верхнюю вакуумную камеру 15, соединенную через патрубок 16 и магистральный вакуумный шланг 8 (фиг. 1, 2) с вакуумпроводом 17, и нижнюю вакуумную камеру 18 (фиг. 4), соединенную через патрубок 19 и шланг периодического вакуума 11 (фиг. 1, 3) с исполнительным механизмом 3.
Для соединения вакуумных камер 15 и 18 (фиг. 4) между собой в процессе работы на штоке 13 выполнена проточка 20, превышающая по ширине расстояние (перемычку) между камерами. Корпус 14 оборудован скобой 21, а шток 13 - головкой 22, за которую шток 13 удерживается скобой 21 в исходном (стартовом) положении.
К основным узлам и деталям поплавкового пневмодатчика относятся, кроме того, верхняя молочная камера 23, соединенная посредством патрубка 24 и молочного шланга 12 (фиг. 1, 3) с коллектором 7 доильного аппарата, и нижняя молочная камера 25 (фиг. 4), которая посредством патрубка 26 и магистрального молочного шланга 9 (фиг. 1, 2) соединена с молокопроводом 27. В нижней молочной камере 25 (фиг. 4) расположен поплавок 28, который с помощью клапана 29 соединен со штоком 13.
Верхняя и нижняя молочные камеры 23 и 25, служащие составляющими элементами молочной магистрали, проходящей от доильных стаканов 6 (фиг. 1) доильного аппарата до молокопровода 27, сообщаются между собой через направляющее гнездо 30 (фиг. 4) клапана 29.
Клапан 29, хотя бы частично, находится одновременно в верхней молочной камере 23, направляющем гнезде 30 и нижней молочной камере 25 и выполнен с возможностью перекрытия в процессе работы направляющего гнезда 30.
Автомат управления 1 (фиг. 1, 2) смонтирован на ручке 4 доильной аппаратуры. Такая конструкция основных узлов и деталей автомата управления, ликвидирующая наличие шлангов на головке штока, соединяющих непосредственно шток пневмодатчика с исполнительным механизмом, путем переноса шлангов с подвижного штока на неподвижный корпус штока, позволяет "разгрузить" шток и устранить негативное влияние шлангов на работу манипулятора.
И, как следствие переноса шлангов на корпус штока, наличие двух вакуумных камер в корпусе позволило упростить конструкцию штока, исключив наличие технологически трудновыполнимых продольных отверстий в штоке и заменив их обычной наружной проточкой.
Доработка конструкции только автомата управления позволяет добиться более четкой и стабильной работы манипулятора на всех заданных режимах, снизить массу манипулятора, повысить удобство обслуживания и производительность труда доярок.
Подвеска 2 выполнена в виде дуги с элементами копирования поперечного профиля тела животного. Для лучшей фиксации подвески 2 на теле животного и безопасности обслуживания один конец подвески 2 оканчивается бобышкой 31 (фиг. 1). Другой конец подвески 2 соединен посредством быстродействующей телескопической связи 32 с исполнительным механизмом 3. При этом подвеска 2 с исполнительным механизмом 3 смонтированы между собой таким образом, что центр тяжести устройства расположен в вертикальной плоскости продольной оси симметрии животного, что способствует правильной самоустановке манипулятора на теле животного.
Исполнительный механизм 3 выполнен в виде заключенной в ограждение 33 (фиг. 1, 3) гофрированной трубки 34, один конец которой прикреплен к верхней торцевой части ограждения 33, а другой - с помощью гибкой тяги (леска, тросик и др.) 35, размещенной в U-образной направляющей 36, соединен с корпусом коллектора 7 доильного аппарата. Один конец U-образной направляющей 36 прикреплен к нижней торцевой части ограждения 33 гофрированной трубки 34, а над другим расположено прикрепленное к ограждению 33 с помощью кронштейна улавливающее доильные стаканы 6 кольцо 37.
Быстродействующая телескопическая связь 32 между подвеской 2 и исполнительным механизмом 3 включает герметично смонтированную на исполнительном механизме 3 втулку 38 и расположенный в ней с возможностью перемещения выполненный прямолинейным конец 39 дуги подвески 2.
При этом нижний конец втулки 38 размещен внутри гофрированной трубки 34 исполнительного механизма 3 на участке сжатых гофр, занимаемом гофрами в результате сжатия гофрированной трубки 34, и заглушен, а верхний конец втулки 38 - открытый - выступает над верхней торцевой частью ограждения 33 гофрированной трубки 34 и снабжен фиксатором 40 хода подвески 2, выполненным в виде стопорного винта с поворотной ручкой.
Нижний конец втулки 38, расположенный внутри гофрированной трубки 34 на участке сжатых гофр, одновременно служит для исключения радиальной деформации гофр в процессе сжатия (сокращения) гофрированной трубки 34 под действием вакуума, так как гофры в этом случае нанизывается на втулку 38.
Благодаря наличию быстродействующей телескопической связи 32 между исполнительным механизмом 3 и подвеской 2, исполнительный механизм 3, а следовательно, и доильный аппарат имеет возможность регулирования его установки по высоте, что позволяет оператору машинного доения быстро установить доильный аппарат в необходимое по высоте исходное положение. Необходимость в этом возникает в связи с тем, что у животных высота расположения вымени имеет отклонения в ту или другую сторону от среднего ее значения ("номинала"), обусловленные такими факторами как порода, возраст, условия выращивания и др.
Технологический процесс доения животных с помощью предложенного манипулятора и его работа осуществляется следующим образом. Оператор навешивает на животное подвеску 2 (фиг. 1), оснащенную доильным аппаратом и исполнительным механизмом 3, закрепляет ручку 4 доильной аппаратуры с автоматом управления 1 на молочно-вакуумном кране, фиксирует шток 13 (фиг. 2, 4), скобой 21 (фиг. 4) в исходном положении и, установив с помощью быстродействующей телескопической связи 32 (фиг. 1, 3) посредством стопорного винта 40 доильный аппарат на оптимальной высоте (при необходимости), надевает его на подготовленное для доения вымя животного.
В стартовом положении пневмодатчика, когда шток 13 (фиг. 4) удерживается за головку 22 скобой 21 в исходном положении, исполнительный механизм 3 (фиг. 1) манипулятора обеспечивает его работоспособность в начальный период процесса доения (фиг. 4).
При увеличении интенсивности молокоотдачи до 400 мл/мин шток 13 пневмодатчика под действием поплавка 28 приподнимается вверх, скоба 21 занимает нерабочее положение (фиг. 4 - изображено пунктиром), а пневмодатчик переходит в режим автоматического контроля за процессом доения (фиг. 4, 5 и 6).
При снижении потока молока, одной из причин которого может быть "наползание" доильных стаканов 6 (фиг. 1) на соски вымени и пережатие молочных протоков сосков вымени, шток 13 (фиг. 4) пневмодатчика опускается вниз в корпусе 14 и посредством своей проточки 20 (фиг. 5) делает сообщающимися верхнюю вакуумную камеру 15, соединенную с вакуумпроводом 17 (фиг. 1), и нижнюю вакуумную камеру 18 (фиг. 5), связанную с исполнительным механизмом 3 (фиг. 1), в результате чего гофрированная трубка 34 исполнительного механизма 3, сжимаясь под действием создавшегося в ней вакуума, оттягивает посредством гибкой тяги 35 доильный аппарат за коллектор 7 усилением 2,5...3,0 кг, обеспечивая выполнение операций машинного додаивания (фиг. 5).
Если поток молока возрастает, шток 13 под действием поплавка 28 (фиг. 4) пневмодатчика приподнимается вверх, вследствие чего вакуумные камеры 15 и 18 корпуса 14 разобщаются, натяжение со стороны исполнительного механизма 3 (фиг. 1) ослабевает, и доение происходит в обычном режиме.
Когда поток молока снижается до 200 мл/мин, шток 13 (фиг. 4) пневмодатчика автомата управления 1 (фиг. 1) под действием поплавка 28 (фиг. 4), опускается в корпусе 14 вниз; в то же время клапан 29 (фиг. 6), опускаясь на свое направляющее гнездо 30, разобщает верхнюю молочную камеру 23 (фиг. 4) от нижней молочной камеры 25, т.е. перекрывает собой молочную магистраль (фиг. 6), в результате чего подсосковые камеры доильных стаканов 6 (фиг. 1) отключаются от действия вакуума, а при опускании вниз штока 13 (фиг. 6) верхняя вакуумная камера 15 корпуса 14 посредством проточки 20 штока 13 сообщается с нижней вакуумной камерой 18, и исполнительный механизм 3 (фиг. 1) под действием вакуума, создавшегося в гофрированной трубке 34, легко снимает доильный аппарат с вымени животного, который спадает на кольцо 37, улавливающее доильные стаканы 6.
После выдаивания первой коровы оператор, не снимая ручку доильной аппаратуры с молочно-вакуумного крана, перевешивает подвеску с исполнительным механизмом и доильным аппаратом на соседнюю корову. Каждая последующая пара коров выдаивается по принятой оператором схеме очередности.
Благодаря конструкции подвески 2, выполненной в виде дуги, копирующей в той или иной степени поперечный профиль тела животного, и способу монтажа на ней исполнительного механизма 3 с доильным аппаратом и улавливателем 37 доильных стаканов 6, предусматривающему расположение центра тяжести устройства в вертикальной плоскости продольной оси симметрии животного, подвеска при установке ее на круп животного в области пояснично-крестцовых выступов впадин входит с ними в "зацепление" и способствует правильной самоустановке манипулятора на теле животного.
В предложенном манипуляторе автомат управления процессом доения может быть применен, в принципе, любого типа: поплавкового, струйного, мембранного и др. и, в зависимости от своих технических характеристик и функциональных особенностей, а также тип доильных установок и способов доения (в молокопровод, в доильное ведро или молочную флягу с последующей подачей молока в молокопровод или без нее - при отсутствии молокопровода), может быть смонтирован в другом месте системы. В связи с этим, может измениться и компоновка других узлов и деталей системы, например, пульсатора 5, соединяемого посредством магистрального вакуумного шланга 8 с вакуумпроводом 17 с одной стороны и шланга переменного вакуума 10 с распределителем коллектора 7 - с другой.
Предложенный переносной манипулятор доения может применяться для доения животных в стойлах, летних лагерях и на пастбищах, на всех типах доильных установок, на общественных и семейных фермах, в крестьянских и фермерских хозяйствах непосредственно в молокопровод, а при соответствующей компоновке - и в доильные ведра или молочные фляги.
Применение предложенного устройства позволит полностью устранить передержки доильного аппарата на вымени животных, резко снизить заболеваемость коров маститом, значительно улучшить условия работы и повысить производительность труда обслуживающего персонала.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДОЕНИЯ | 2000 |
|
RU2186486C2 |
| ДВУХРЕЖИМНЫЙ ДОИЛЬНЫЙ АППАРАТ | 2004 |
|
RU2269889C1 |
| ДВУХРЕЖИМНЫЙ ДОИЛЬНЫЙ АППАРАТ | 2004 |
|
RU2257707C1 |
| МАНИПУЛЯТОР ДОЕНИЯ | 1991 |
|
RU2036580C1 |
| ДВУХРЕЖИМНЫЙ ДОИЛЬНЫЙ АППАРАТ | 2010 |
|
RU2440716C2 |
| УСТАНОВКА ДОИЛЬНАЯ ВЫДВИЖНАЯ | 2002 |
|
RU2234835C1 |
| ДОИЛЬНЫЙ АППАРАТ | 1999 |
|
RU2169460C1 |
| СПОСОБ ПОВЫШЕНИЯ УРОЖАЙНОСТИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2000 |
|
RU2158069C1 |
| МАНИПУЛЯТОР ВИННИКОВА И.К. | 1995 |
|
RU2097965C1 |
| СТАНОК ДЛЯ ГРУППОВОГО СОДЕРЖАНИЯ ТЕЛЯТ | 1996 |
|
RU2098950C1 |
Изобретение относится к манипуляторам доильных аппаратов в доильных установках. Манипулятор доения включает автомат управления, исполнительный механизм и подвеску и является переносным, а подвеска выполнена в виде дуги с элементами копирования поперечного профиля тела животного, соединенной одним концом с помощью быстродействующей телескопической связи с исполнительным механизмом, выполненным в виде гофрированной трубки, заключенной в ограждение. Исполнительный механизм связан с коллектором гибкой тягой, расположенной в U-образной направляющей, смонтированной на ограждении гофрированной трубки и оснащенной улавливателем доильных стаканов, выполненным в виде кольца. Удобен и надежен в эксплуатации, позволяет полностью устранить передержки доильного аппарата на вымени, снизить заболеваемость коров маститами, применим на всех видах ферм и доильных установок. 2 з. п. ф-лы, 6 ил.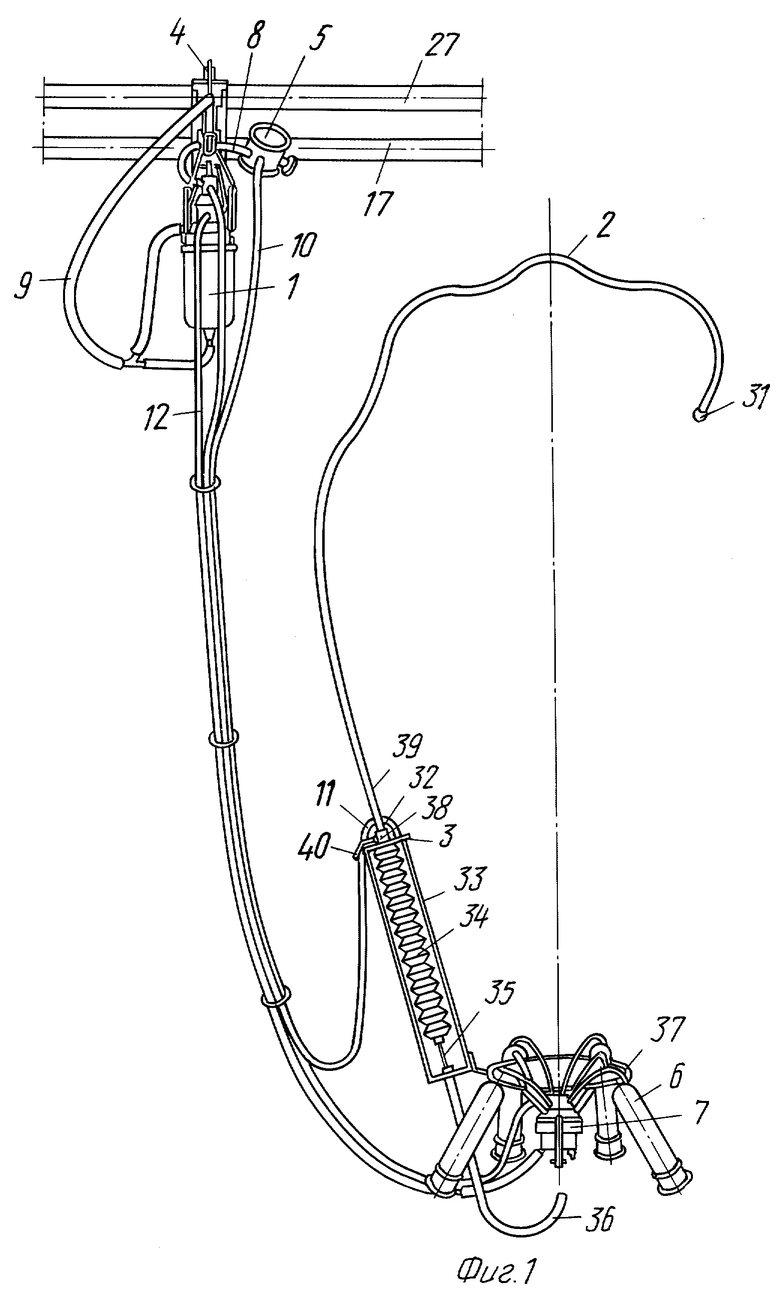
| МАНИПУЛЯТОР ДОЕНИЯ | 0 |
|
SU392916A1 |
| Манипулятор для доения | 1985 |
|
SU1273038A1 |
| Манипулятор доильной установки | 1989 |
|
SU1699385A1 |
| Манипулятор к доильному аппарату | 1985 |
|
SU1291086A1 |
| МАНИПУЛЯТОР ДОЕНИЯ | 1991 |
|
RU2036580C1 |
| МАНИПУЛЯТОР ВИННИКОВА И.К. | 1995 |
|
RU2097965C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СНЯТИЯ ДОИЛЬНОГО АППАРАТА | 1992 |
|
RU2095973C1 |
