Изобретение относится к технике радиосвязи и может быть использовано для обнаружения подвижных объектов (ПО), в том числе воздушных судов (ВС), определения их местонахождения (МН), параметров движения и слежения за ними.
Известна система определения местонахождения подвижных объектов, которая содержит N блоков сигнализации, установленных на автомобилях, М приемных станций, образующих контрольные пункты, установленные стационарно в опорных точках с известными координатами, диспетчерскую станцию, К станций отображения информации. Каждый блок сигнализации содержит задающий генератор, блок формирования псевдослучайной последовательности (ПСП) и кодирования, датчики сигнализации, синтезатор несущей частоты, модулятор, усилитель мощности, антенно-фидерное устройство. Диспетчерская станция содержит антенно-фидерное устройство связи, аппаратуру связи, блок сопряжения, персональную электронно-вычислительную машину (ПЭВМ). Принцип действия системы основан на разностно-дальномерном методе с применением непрерывно излучаемых разнесенными в пространстве приемными пунктами фазоманипулированных сигналов с большой базой и с единой для системы шкалой времени [1].
Данная система имеет следующие недостатки:
- диспетчерская станция, приемные станции и подвижные объекты расположены на земле, а следовательно, имеют ограниченный радиус действия, связанный с условиями прямой (оптической) видимости;
- диспетчерская станция связана со всеми М приемными станциями, которые не связаны между собой, что так же уменьшает зону, обслуживаемую системой;
- станции отображения связаны с диспетчерской станцией односторонними связями из-за этого оператор, наблюдающий ситуацию, оказывается не подключенным к процессу управления движением ПО;
- в системе осуществляется только определение местоположения ПО и отсутствует возможность слежения за ним.
Известны системы определения местонахождения и слежения за удаленными подвижными объектами, состоящие из первичных и вторичных радиолокаторов [2], устройств, обеспечивающих обнаружение целей "на просвет". Все эти устройства содержат: передатчик, приемник, одну или несколько антенн, модулятор и демодулятор, устройства обработки передаваемых и принимаемых сигналов, регистрирующее устройство (в большинстве случаев - индикатор воздушной обстановки). Одним из аналогов является система вторичной радиолокации, содержащая, например, бортовые ответчики на воздушных судах и наземный локатор "Корень-АС" с аппаратурой приема и отображения информации "Комета-2М" [3]. Бортовая и наземная аппаратура системы состоит из одноименных элементов: передатчика и приемника, модулятора и демодулятора, устройств обработки передаваемых и принимаемых сигналов, устройства регистрации. Конструктивно эти элементы различаются между собой из-за особенностей размещения: бортового или наземного. Бортовой комплекс (ответчик) связан с различными датчиками воздушного судна: навигационной системой, системой самолетовождения. Снимаемые с ВС по каждому запросу с земли цифровые данные на регистрирующем устройстве отображаются в виде 16 формуляров, значений азимута и дальности (при вызове ВС), высоты полета и номера ВС, вектора экстраполяции по времени и дальности, вызываемые по всем ВС, оборудованными ответчиками.
Однако аналогу присущи следующие недостатки:
- для уменьшения углов закрытия требуются сложные громоздкие сооружения (горки, мачты), на которые устанавливается наземный комплекс;
- наземное оборудование, в том числе система вращения антенны, потребляет электроэнергию, мощностью до 10 кВт в час [3];
- большое число элементов, в том числе электромеханических, снижают среднее время наработки на отказ системы;
- для поддержания работоспособности наземной аппаратуры, работающей непрерывно, требуются значительные эксплуатационные расходы.
Известна система определения местонахождения и слежения за удаленным подвижным объектом, которая состоит из 77 спутников, работающих на 7 полярных орбитах во всемирной системе спутниковой связи и поддерживающих связь с несколькими главными коммуникационными станциями CSO и рядом наземных станций управления GCS, которая и выбрана за прототип [4]. В системе на 7 полярных орбитах задействованы 77 спутников с соответствующими системами связи, сотовые группы на поверхности Земли и другие объекты. Спутники представляют собой узловые стыки связи, как и наземные станции CSO. 77 спутниками управляют станции GCS. Между смежными спутниками и наземными узлами организованы системы двусторонней радиосвязи. Устройство определения положения PDU размещают на подвижном объекте. PDU содержит приемопередатчик коммуникационной сети, в котором имеются передатчик и приемник. Передатчик и приемник соответственно передают и принимают сигналы в формате, совместимом с работой спутников связи и канала. Эти сигналы передают информацию, которая позволяет PDU обмениваться данными с ближним спутником связи. Для определения МН объекта необходимо вначале организовать обмен несколькими сообщениями, чтобы включить PDU в активный режим и затем получить необходимые данные путем обработки на соответствующем спутнике связи двух сигналов с объекта. С PDU информация о местонахождении объекта передается в службу текущего наблюдения.
Передача данных с PDU службе текущего наблюдения осуществляется по спутниковым каналам связи и наземной сети. В прототипе спутники, входящие в состав системы, непрерывно передают сигналы захвата и сопровождения объекта на PDU, местонахождение которого необходимо определить. После выбора соответствующего PDU с земли на один из спутников посылается соответствующая команда. После подготовительной операции со спутника передается сигнал захвата и сопровождения объекта. Этот сигнал захвата и сопровождения объекта непрерывно или с интервалами передается по определенным каналам, входящим в каждую группу каналов. Эта процедура позволяет устройствам PDU находить способ связи при помощи сети. При помощи сигнала захвата и сопровождения объекта в абонентские аппараты передается ограниченный объем данных, например, о подлинности спутника, передающего этот сигнал, о спутниковой версии системного времени и о подлинности ячейки, к которой направлен сигнал захвата и сопровождения объекта. В одном из вариантов определения местонахождения локального объекта с помощью сигнала захвата и сопровождения объекта можно определить географическое положение центра ячейки, к которой направлен этот сигнал. Указанный сигнал может содержать группу импульсов местонахождения, с помощью которых абонентский аппарат получает информацию, определяющую местонахождение объекта. В сети спутники связи, в основном, работают как ретрансляторы. Иначе говоря, большинство принятых спутниками сообщений ими же повторно передаются. Спутники связи проводят измерения и подборку данных, которые используются центром обработки для определения местонахождения объекта. Активизация устройства PDU программируется дистанционно на основании данных, принимаемых по сети радиосвязи. В активное состояние устройства будут включаться только тогда, когда можно будет получить действительно полезные данные или имеются хорошие возможности для определения и/или передачи данных о местонахождении объекта. Определение местонахождения удаленного объекта может быть реализовано CSO, хотя точное местонахождение важным параметром прототипа не является. Данные о МН передаются службе текущего наблюдения по мере надобности.
К недостаткам прототипа следует отнести:
- аппаратная реализация системы сложная, так как в нее входят разнесенные территориально наземные узлы, которые поддерживают двустороннюю радиосвязь с 77 спутниками связи, несколько главных коммутационных станций и наземные станции управления, соединенные между собой каналами связи. В наземных сотах устанавливаются сотовые антенны, а на спутниках - матрицы направленных антенн. Таким образом, подтверждается большая сложность интегрированной системы;
- часть процедур определения МН объекта осуществляется на соответствующем контроллере станции спутниковой радиосвязи, что требует установку на спутнике дополнительной аппаратуры и расхода энергетики;
- ориентировочное определение сотовой ячейки с объектом, организация обмена несколькими сообщениями для включения PDU в активный режим и получения необходимых данных путем обработки на соответствующем спутнике двух сигналов с объекта занимают значительный интервал времени, что исказит истинную (в реальном масштабе времени) информацию о МН быстро перемещающихся в пространстве объектах, например, о воздушных судах;
- в прототипе учтен только доплеровский сдвиг частоты радиосигнала за счет движения спутника, неучтенный дополнительный доплеровский сдвиг за счет движения ПО увеличивает составляющую ошибки определения МН ПО;
- в прототипе точность определения МН ПО зависит от минимальных размеров сотовой ячейки, выделенной на Земле диаграммой направленности сложных сразированных спутниковых антенн (например, при ширине диаграммы направленности антенны θ=1°, что трудно получить в космосе, на R=760 км ширина сотовой ячейки на земле составит около 13 км);
- в прототипе осуществляется слежение только за одним объектом, не осуществляется обнаружение объектов и не определяются параметры движения нескольких объектов одновременно.
Задачей, на решение которой направлено заявляемое изобретение, является упрощение системы и связанное с ним повышение надежности системы при снижении затрат на ее развертывание и эксплуатационное обслуживание.
Это достигается тем, что в систему определения местонахождения и слежения за удаленными подвижными объектами, содержащую наземную сеть, соединенную через станции управления двусторонними каналами радиосвязи с навигационными спутниками, абонентские аппараты, службу текущего наблюдения и бортовые комплексы передачи данных на подвижных объектах, введена дополнительная наземная сеть, соединяющая между собой двусторонними каналами связи наземные комплексы передачи данных, абонентские аппараты, службу текущего наблюдения, причем наземные комплексы передачи данных двусторонними каналами радиосвязи соединены с подвижными объектами, которые в свою очередь соединены между собой двусторонними каналами радиосвязи, навигационные спутники односторонними каналами радиосвязи соединены параллельно с подвижными объектами и наземными комплексами передачи данных.
На чертеже приведена структурная схема системы определения местонахождения и слежения за удаленными подвижными объектами. Кривой линией условно показана поверхность Земли.
Система определения местонахождения и слежения за удаленными подвижными объектами содержит наземную сеть 1 станций 2 управления навигационными спутниками 3, абонентские аппараты 4, службу 5 текущего наблюдения, бортовые комплексы 6 передачи данных подвижных объектов, дополнительную наземную сеть 7 наземных комплексов 8 передачи данных.
Работа системы определения местонахождения и слежения за удаленными подвижными объектами заключается в следующем. Станции 2 управления навигационными спутниками 3 (на чертеже их показано только 2), объединенные в единую наземную сеть 1, по принимаемым с навигационных спутников 3 (на чертеже их показано только 3) сигналам определяют достоверность передаваемых с них данных и при необходимости осуществляют коррекцию их траекторий и подстройку генератора эталонного времени. Сигналы с навигационных спутников 3 принимаются на всех бортовых комплексах 6 передачи данных подвижных объектов (на чертеже их показано только 3) и наземными комплексами 8 передачи данных (на чертеже их показано только 2). Эти сообщения после соответствующей обработки используются для точного определения местонахождения бортовых 6 и наземных 8 комплексов передачи данных. Полученные после обработки данные о координатах бортовых комплексов 6 передачи данных подвижных объектов и параметрах их движения передаются на наземные комплексы 8 передачи данных, в зоне радиосвязи которых находятся бортовые комплексы 6 передачи данных подвижных объектов. Принятые сообщения в наземных комплексах 8 передачи данных проверяются на достоверность и при отсутствии ошибок преобразуются в формат, необходимый для сопряжения с дополнительной наземной сетью 7. Абонентами дополнительной наземной сети 7 являются объекты службы 5 текущего наблюдения (на чертеже показан только 1), например центр управления воздушным движением для гражданской авиации, и абонентские аппараты 4 (на чертеже показано только 2), например автоматизированные рабочие места диспетчеров управления воздушным движением. Данные, циркулирующие в дополнительной наземной сети 7, позволяют проводить слежение одновременно за всеми находящимися в зоне прямой видимости бортовыми комплексами 6 передачи данных подвижных объектов, точно определять их местонахождение и параметры движения. В наземных комплексах 8 передачи данных в зоне радиосвязи может выполняться процедура контроля и коррекции данных, передаваемых с бортовых комплексов 6 передачи данных подвижных объектов. В этом случае на основании анализа сообщений с навигационных спутников 3, находящихся в зоне прямой видимости под углами места относительно Земли не менее 5°, в наземных комплексах 8 передачи данных вырабатывается решение (дифференциальная поправка) о состоянии сегмента наблюдаемых навигационных спутников 3. Эта поправка передается на все бортовые комплексы 6 передачи данных подвижных объектов, находящиеся в зоне радиосвязи соответствующего наземного комплекса 8 передачи данных. В вычислительных устройствах бортовых комплексов 6 передачи данных подвижных объектов, после оценки достоверности принятого сообщения осуществляется коррекция данных, выдаваемых на наземные комплексы 8 передачи данных о местонахождении и параметрах движения подвижных объектов. Для исключения конфликтных ситуаций или выполнения других задач предусмотрены двусторонний обмен данными между бортовыми комплексами 6 передачи данных подвижных объектов и абонентскими аппаратами 4, а также передача со службы 5 текущего наблюдения через наземные комплексы 8 передачи данных дополнительной информации. Наземный 8 и бортовой 6 комплексы передачи данных постоянно находятся в активном режиме. Данные об обнаруженных и сопровождаемых бортовых комплексах 6 передачи данных подвижных объектов и точных параметрах их движения по дополнительной наземной сети 7 постоянно передаются в службу 5 текущего наблюдения, на абонентские аппараты 4, например на рабочие места диспетчеров наземных служб УВД, и на бортовые комплексы 6 передачи данных подвижных объектов, находящиеся в зоне радиосвязи, например, для решения экипажами подвижных объектов конкретных задач. Точные координаты подвижных объектов и параметры их движения снимаются с датчиков бортовых комплексов 6 передачи данных подвижных объектов, обрабатывающих, например, навигационные данные с инерциальных, спутниковых или других систем, а также с систем, обеспечивающих прием дифференциальных поправок с наземных комплексов 8 передачи данных. У навигационных спутников 3 с Земли через наземные станции 2 управления корректируется эталонное время и координаты орбиты. Данные с датчиков бортовых комплексов 6 передачи данных подвижных объектов передаются на наземный комплекс 8 передачи данных сразу после получения с него запросного сообщения или через известный временной интервал.
В наземном комплексе 8 передачи данных поступающие из канала "воздух - земля" сообщения демодулируются, дешифрируется служебная часть сообщения и определяется в каком режиме работает система. Затем сообщения обрабатываются в соответствии с принятым в системе протоколом обмена для осуществления идентификации принятого в сообщении адреса с хранящимися адресами подвижных объектов. При совпадении адреса подвижного объекта с хранящимся в списке адресом сообщение обрабатывается. Информационная часть выделенных сообщений по дополнительной наземной сети 7 поступает на абонентские аппараты 4 на регистрирующие или исполнительные устройства абонентов, не указанные на чертеже, а также в службу 5 текущего наблюдения. По полученным значениям координат подвижных объектов, привязанных к единому (глобальному) времени, у абонентских аппаратов 4 и в службе 5 текущего наблюдения известными методами [8] осуществляется построение трассы подвижного объекта и слежение за его движением. Если в это же время по дополнительной наземной сети 7 связи поступают сообщения от других источников информации, например от службы 5 текущего наблюдения, то в наземном комплексе 8 передачи данных осуществляется ранжировка сообщений по приоритетам для входящих информационных сообщений в соответствии с принятыми для обеспечения связи с подвижными объектами категориями срочности. При поступлении из канала радиосвязи сообщений в наземном комплексе 8 передачи данных осуществляется сдвиг сообщений соответствующих очередей в соответствии с протоколом обмена и категорией срочности. Далее определяется время "старения" информации, и, если сообщение в течение определенного промежутка времени не было передано в канал связи, то оно "стирается" и посылается запрос на повторную передачу сообщения.
В бортовых комплексах 6 передачи данных подвижных объектов приемник постоянно находится в режиме приема на частоте передачи опросного сообщения от наземных комплексов 8 передачи данных. В бортовых комплексах 6 передачи данных подвижных объектов поступающие из канала "воздух - земля" сообщения обрабатываются аналогично, как в наземных комплексах 8 передачи данных, и в соответствии с принятым в системе протоколом обмена данными информация распределяется, например, между регистрирующими или исполнительными устройствами подвижных объектов.
Для того чтобы избежать столкновений при одновременной передаче несколькими бортовыми комплексами 6 передачи данных подвижных объектов, может быть использован, например, контроль несущей за время воздействия на бортовой приемник служебной части сообщений. Тогда подготовленное сообщение передается только в том случае, когда радиоканал свободен. Для того чтобы разнести во времени моменты выхода на связь подвижных объектов в то время, когда они обнаружили, что радиоканал свободен, в бортовых комплексах 6 передачи данных постоянно анализируется несущая частота и в случае необходимости осуществляется задержка передачи сообщений от подвижных объектов. Периодичность посылки сообщений определяется экипажем подвижных объектов в соответствии с существующей ситуацией или задается программно. Если подвижные объекты сформировали сообщения для передачи и обнаружили, что радиоканал свободен (или им выделены отдельные временные слоты), то они информируют остальные подвижные объекты и службу 5 текущего наблюдения о своем местонахождении и распределяют очередность собственной передачи сообщений.
В наземных 8 и бортовых 6 комплексах передачи данных имеется оборудование, позволяющее при необходимости проводить обмен данными по радиоканалу между экипажем подвижных объектов (или в автоматическом режиме с бортовыми комплексами 6 передачи данных при необслуживаемом подвижном объекте) и абонентами дополнительной наземной сети 7. В этом оборудовании, например, как в гражданской авиации, может быть осуществлен выбор элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии [6]. С наземных комплексов 8 передачи данных на бортовые комплексы 6 передачи данных подвижных объектов могут быть переданы различные сообщения, в том числе, например, для воздушных судов дифференциальные поправки для уточнения передаваемых на наземные комплексы 8 передачи данных о своем местонахождении и параметрах движения.
Основные преимущества заявляемой системы по сравнению с прототипом следующие:
- снижение сложности и стоимости системы на 2-3 порядка по сравнению с прототипом из-за необходимости запуска 77 спутников их постоянного контроля и обслуживания, поддержания работоспособности, развертывания наземных сетей и станций;
- использование существующих навигационных спутников, предназначенных для обеспечения данными всевозможных подвижных объектов;
- сокращение времени доставки информации за счет параллельного выполнения процедур приема и обработки сообщений с навигационных спутников приема и обработки сообщений с наземных комплексов передачи данных на бортовые комплексы передачи данных подвижных объектов. А если вместе с координатной информацией передается точное глобальное время проведения измерений, как это делается на практике, то систематическую составляющую ошибки определения местонахождения с помощью экстраполяционных методов можно исключить, что важно при слежении за быстро перемещающимися в пространстве объектами;
- точность определения местонахождения подвижных объектов зависит только от точности обработки принимаемых на бортовые комплексы передачи данных подвижных объектов сообщений с навигационных спутников и с наземных комплексов передачи данных. При передаче на бортовые комплексы передачи данных подвижных объектов и соответствующей обработке дифференциальных поправок точность определения местонахождения подвижных объектов составляет ±1 м [7];
- в системе осуществляется одновременное слежение за сотнями подвижных объектов, обнаружение объектов при входе в зону радиосвязи наземных комплексов передачи данных обеспечивается по передаваемым с них сообщениям. По двум и более значениям координат в течение известного промежутка времени определяются параметры траектории движения объекта и слежение за ним.
Экономически выгодно размещать заявляемую систему на маршрутах, где практически отсутствует радиолокационное поле или другие датчики-обнаружители движения объектов. Соединенные между собой с помощью дополнительной наземной сети наземные комплексы передачи данных, зоны устойчивой радиосвязи которых частично перекрываются, позволяют обеспечить непрерывное автоматическое сопровождение соответствующих подвижных объектов на трассах, в том числе и воздушных судов гражданской авиации.
Устройства, указанные в заявляемой системе, могут быть реализованы следующим образом. В качестве навигационных спутников могут быть использованы действующие спутники систем GPS и ГЛОНАСС с существующей наземной сетью и станциями для управления ими, в качестве наземного комплекса передачи данных - наземный комплекс передачи данных "Рубин-М" /ИСКМ.465616.008/. Для реализации на бортовом комплексе передачи данных функций передатчика, приемника, модулятора, демодулятора может быть использована радиостанция "Орлан-85СТ" /ИЖ. 101039-0601/, для выполнения других вычислительных операций - аппаратура "Брик" /ИСКМ.465616.004/.
Литература
1. Патент РФ №2082279, М.Кл. Н 04 В 7/26, G 01 S 5/00, G 08 B 25/00, 1997, БИ №17.
2. М.Сколник. Введение в технику радиолокационных систем: Пер. с англ. - М.: Мир, 1965. - 747 с.
3. Технические системы и средства, создаваемые для Единой системы организации воздушного движения России. Каталог. Изд. 2-е перераб. и доп. М.: ОАО "НИИЭИР", 1998. - 159 с.
4. Патент №2128884, М.кл. Н 04 В 7/00, Н 04 В 7/185, 1999 (Прототип).
5. В.Строителев. Новости // Новости аэронавигации, 2000, №3. С.2-3.
6. Б.И.Кузьмин "Сети и системы цифровой электросвязи", часть 1 "Концепция ИКАО CNS/ATM". Москва - Санкт-Петербург: ОАО "НИИЭР", 1999, 206 с.
7. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
8. Д.С.Конторов, Ю.С.Голубев-Новожилов. Введение в радиолокационную системотехнику. - М.: Сов. Радио, 1971, 367 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535923C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2302698C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2505929C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УДАЛЕННОГО ОБЪЕКТА, СПОСОБ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМ ОБЪЕКТОМ И ИНТЕГРИРОВАННАЯ СИСТЕМА, ОСУЩЕСТВЛЯЮЩАЯ ЭТИ СПОСОБЫ | 1993 |
|
RU2128884C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2572829C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2014 |
|
RU2557801C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2791262C1 |
Изобретение относится к технике радиосвязи и может быть использовано для обнаружения подвижных объектов (ПО), в том числе воздушных судов (ВС), определения их местонахождения (МН), параметров движения и слежения за ними. Технический результат заключается в упрощении системы и повышении надежности системы. Технический результат достигается тем, что в систему, содержащая наземную сеть, соединенную через станции управления двусторонними каналами радиосвязи с навигационными спутниками, абонентские аппараты, службу текущего наблюдения и бортовые комплексы передачи данных на подвижных объектах, вводится дополнительная наземная сеть, соединяющая между собой двусторонними каналами связи дополнительно введенные наземные комплексы передачи данных, а также абонентские аппараты и службу текущего наблюдения, причем наземные комплексы передачи данных двусторонними каналами радиосвязи соединены с бортовыми комплексами передачи данных подвижных объектов, которые в свою очередь соединены между собой двусторонними каналами радиосвязи, при этом навигационные спутники односторонними каналами радиосвязи соединены как с бортовыми комплексами передачи данных подвижных объектов, так и с наземными комплексами передачи данных. 1 ил.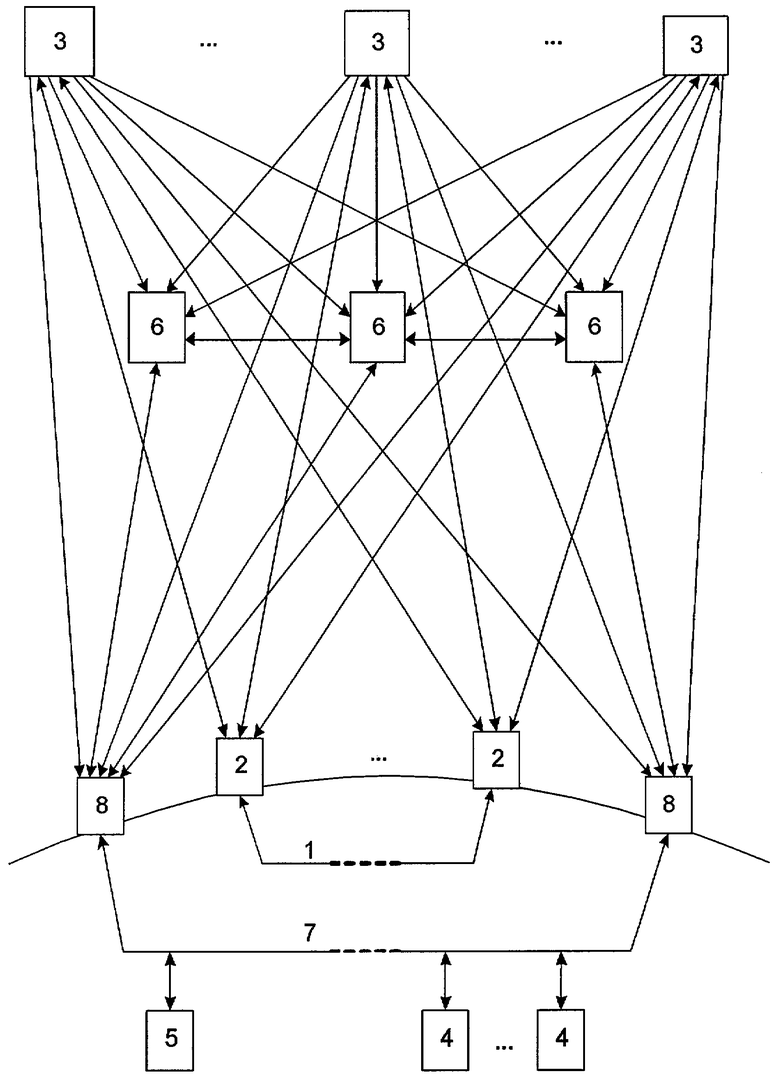
Система определения местонахождения и слежения за удаленными подвижными объектами, содержащая наземную сеть, соединенную через станции управления двусторонними каналами радиосвязи с навигационными спутниками, абонентские аппараты, службу текущего наблюдения и бортовые комплексы передачи данных на подвижных объектах, отличающаяся тем, что в нее введена дополнительная наземная сеть, соединяющая между собой двусторонними каналами связи дополнительно введенные наземные комплексы передачи данных, а также абонентские аппараты и службу текущего наблюдения, причем наземные комплексы передачи данных двусторонними каналами радиосвязи соединены с бортовыми комплексами передачи данных подвижных объектов, которые в свою очередь соединены между собой двусторонними каналами радиосвязи, при этом навигационные спутники односторонними каналами радиосвязи соединены как с бортовыми комплексами передачи данных подвижных объектов, так и с наземными комплексами передачи данных.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УДАЛЕННОГО ОБЪЕКТА, СПОСОБ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМ ОБЪЕКТОМ И ИНТЕГРИРОВАННАЯ СИСТЕМА, ОСУЩЕСТВЛЯЮЩАЯ ЭТИ СПОСОБЫ | 1993 |
|
RU2128884C1 |
| Детектор линейно-поляризованного излучения | 1977 |
|
SU671634A1 |
| М.С | |||
| ЯРЛЫКОВ, А.А | |||
| БАЗАРОВ | |||
| Совмещенная аппаратура потребителей спутниковой и гиперболической радионавигационных систем | |||
| Ж | |||
| "Радиотехника", 1992, №4, с.3-13 | |||
| WO 2004102505 A2, 25.11.2004 | |||
| US 5450329 A, 12.09.1995 | |||
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2003 |
|
RU2236707C1 |

