Изобретение относится к установкам для испытания машин и механизмов и предназначено для исследования колебаний конструкции летательных аппаратов в условиях, приближенных к условиям полета, и может быть также применено для вывешивания любых конструкций при динамических испытаниях.
При решении различных задач динамики летательных аппаратов важную роль играют динамические характеристики упругой конструкции, в частности частоты, формы и коэффициенты демпфирования ее собственных колебаний. Для определения указанных характеристик широко используются динамические (частотные) испытания натуральных конструкций летательных аппаратов. При наземных частотных испытаниях летательного аппарата необходимо обеспечить ему условия, соответствующие свободному полету.
Для воспроизведения этих условий используются специальные подвесные системы. Общие требования, предъявляемые к подвесным системам, состоят в том, чтобы свести к минимуму их влияние на динамические характеристики летательного аппарата. Это требование обычно выполняется путем выбора подвесной системы малой жесткости. Практически, если частота собственных колебаний летательного аппарата как твердого тела на подвеске в 3 - 5 раз ниже самой низкой частоты упругих колебаний конструкции, влиянием подвески на динамические характеристики летательного аппарата можно пренебречь. Кроме того, для достаточно точного воспроизведения демпфирующих характеристик собственных колебаний конструкции собственные колебания летательного аппарата как твердого тела на подвеске должны иметь малое затухание.
Для частотных испытаний тяжелых ракет-носителей, имеющих низкие частоты собственных колебаний (частоты I-го тона поперечных колебаний близки к 1 Гц), требуется подвесная система, обеспечивающая 6 степеней свободы летательного аппарата как твердого тела при весьма низких частотах (0,2 - 0,5 Гц) и малом затухании (демпфировании) собственных колебаний. Наиболее полно указанным требованиям отвечает подвесная система, построенная на базе пневмоопор.
Подробное описание различных типов пневмоопор (подвесок, упругих элементов, амортизаторов) можно найти в работах:
1. Я.М. Певзнер, А.М.Горелик. Пневматические и гидравлические подвески. Машгиз 1963 год.
2. М.М.Грибов. Регулируемые амортизаторы РЭА. Москва, "Советское радио" 1974 год.
Известна конструкция пневмоопоры, содержащая заполненную сжимаемой рабочей средой камеру, соединенный с ней одним торцем упругий элемент, крышку, герметично закрывающую упругий элемент с другого торца, мембрану, закрепленную по периметру в камере, и шток, жестко связывающий крышку с мембраной (см. а.с. СССР N 693739). Недостаток устройства состоит в том, что оно создает значительное дополнительное демпфирование колебаний летательного аппарата для динамических испытаниях из-за высоких потерь механической энергии при поперечных колебаниях упругого элемента.
Наиболее близким решением из известных является двухобъемный амортизатор, содержащий заполненную сжимаемой рабочей средой камеру, упругий элемент, соединенную с последним крышку и шарнир. Недостатки указанного амортизатора заключаются в том, что он не обеспечивает линейной характеристики, низкой собственной частоты, не исключает сил сухого трения в подвижных элементах.
Вместе с тем в настоящее время существует потребность в создании систем вывешивания, обеспечивающих частоты собственных поперечных колебаний летательного аппарата как твердого тела не более 0,02 Гц.
Задачей настоящего изобретения является устранение вышеперечисленных недостатков, т. е. приближение испытаний к условиям свободного полета за счет снижения жесткости пневмоопоры в поперечном направлении, а также расширение функциональных возможностей.
В первом варианте технический результат достигается тем, что пневмоопора, содержащая камеру, заполненную сжимаемой рабочей средой, упругий элемент, соединенную с последним крышку и шарнир, снабжена расположенным по оси пневмоопоры дополнительным кольцевым упругим элементом диафрагменного типа, цилиндрическим переходником и удлинителем, выполненным в виде перфорированного цилиндра, а шарнир выполнен упругим, при этом верхний торец упомянутого переходника соединен со вторым бортом основного упругого элемента, нижний торец переходника соединен с удлинителем и посредством дополнительного упругого элемента связан с верхним обрезом камеры, а нижний торец удлинителя через упругий шарнир связан с основанием камеры.
Кроме того, пневмоопора снабжена размещенной по ее оси и шарнирно закрепленной на крышке тягой и соединенный с ней упругий элемент выполнен в виде эластичной диафрагмы, установленной в основании камеры.
Во втором варианте технический результат достигается тем, что пневмоопора, содержащая камеру, заполненную сжимаемой рабочей средой, упругий элемент, соединенную с последним крышку и упругий пояс, снабжена расположенным по ее оси дополнительным кольцевым упругим элементом диафрагменного типа, кожухом и цилиндрическим переходником, а упругий пояс выполнен в виде пневмоупоров, установленных между кожухом и переходником в плоскости, перпендикулярной оси пневмоопоры, при этом верхний торец переходника соединен со вторым бортом основного упругого элемента, а нижний торец переходника соединен посредством дополнительного упругого элемента с верхним обрезом камеры, на котором установлен кожух.
В пневмоопоре также упругий пояс выполнен в виде упругой концентрической оболочки с двумя крышками, расположенными по оси пневмоопоры, при этом одна крышка снабжена пальцем, входящим в отверстие переходника.
Кроме того, пневмоопора снабжена размещенной по ее оси и шарнирно закрепленной на крышке тягой и соединенный с ней упругий элемент выполнен в виде эластичной диафрагмы в основании камеры.
На фиг. 1 изображена схема пневмоопоры первого варианта.
На фиг. 2 изображена схема возбуждения колебаний летательного аппарата по оси пневмоопоры первого варианта.
На фиг. 3 изображена схема пневмоопоры второго варианта.
На фиг. 4 изображена схема пневмоопора (место 1 фиг. 3).
На фиг. 5 изображена схема возбуждения колебаний летательного аппарата по оси пневмоопоры второго варианта.
В соответствии с первым вариантом (фиг. 1) пневмоопора имеет камеру 1, на основании которой по ее оси закреплен упругий шарнир 2, на котором смонтирован удлинитель 3, верхний торец которого через кольцевой упругий элемент 4 связан с верхним обрезом камеры 1, а также соединен с переходником 5, который в свою очередь через второй кольцевой упругий элемент 6 связан с крышкой 7, имеющей фланец. Камера 1, упругие элементы 4 и 6, переходник 5 и крышка 7 образуют замкнутый объем, заполненный сжимаемой рабочей средой.
Пневмоопора первого варианта (фиг. 2) содержит дополнительно эластичную диафрагму 8, установленную в отверстии основания камеры 1, и тягу 9, установленную по оси пневмоопоры, прикрепленную посредством шарнира 10 к крышке 7 и герметично проходящую через центр диафрагмы 8.
Пневмоопор первого варианта работает следующим образом.
К летательному аппарату, установленному на домкратах, в определенных местах (не менее 3-х) закрепляют фланцы крышек 7 пневмоопор. На полу закрепляют основания камер 1. В пневмоопоры подается сжатый воздух. После подъема летательного аппарата в исходное рабочее положение подача воздуха в пневмоопоры прекращается и летательный аппарат готов для проведения частотных испытаний. Во время частотных испытаний производится возбуждение колебаний конструкции летательного аппарата. При вертикальном перемещении крышки 7 упругий элемент 6 работает как пружина, жесткость которой определяется величиной внутреннего объема и давлением газа в пневмоопоре, а переходник 5 и удлинитель 3 при этом практически находятся в неподвижном положении и удерживаются от вертикальных перемещений за счет относительно высокой вертикальной жесткости упругого шарнира 2. При поперечном перемещении крышки 7 поперечная нагрузка через верхний упругий элемент 6 передается на переходник 5 и удлинитель 3, которые, поворачиваясь на упругом шарнире 2, воздействует на нижний упругий элемент 4, который, деформируясь в поперечном направлении, создает необходимую восстанавливающую силу. При поперечном смещении крышки 7 относительно упругого шарнира 2 на подвижную часть пневмоопоры действует опрокидывающий момент, равный произведению доли веса летательного аппарата, воспринимаемой пневмоопорной, на величину поперечного смещения крышки 7.
Этот момент компенсируется восстанавливающим моментом от поворотной жесткости упругого шарнира 2, поворотной жесткости верхнего упругого элемента 6 и за счет поворотной и боковой жесткостей нижнего упругого элемента 4. Восстанавливающий момент от поворотной жесткости упругого шарнира 2, поворотной жесткости верхнего 6 и нижнего 4 упругих элементов зависит от жесткостных свойств используемых элементов и составляет не более 10% полного восстанавливающего момента. Основная доля восстанавливающего момента возникает за счет боковой силы, создаваемой упругим элементом 4, которая приложена на плече, определяемом расстоянием от центра поворота упругого шарнира 2 до упругого элемента 4. Таким образом, задавая положение нижнего упругого элемента 4 по высоте, то-есть выбирая соотношение длин удлинителя 3 и переходника 5, можно во много раз уменьшить боковую жесткость пневмоопоры в сравнении с боковой жесткостью упругого элемента 6, т.е. получить сколь угодно малую частоту собственных поперечных колебаний летательного аппарата как твердого тела на пневмоопорах. При этом обеспечивается достаточно высокая стабильность положения изделия на пневмоопорах из-за относительно высокой стабильности жесткости в поперечном направлении упругого элемента 4. Пневмоопора позволяет сохранять малую жесткость в поперечном направлении при изменении веса исследуемого летательного аппарата, поскольку при изменении давления в ней и пропорциональном изменении грузоподъемности происходит почти пропорциональное изменение жесткости в поперечном направлении упругого элемента 4.
При необходимости приложения возбуждающей силы, действующей по оси пневмоопоры, вибровозбудитель подсоединяется к тяге 9. Тогда усилие от вибровозбудителя через тягу 9 и шарнир 10 передается на крышку 7, жестко соединенную с летательным аппаратом.
В соответствии со вторым вариантом (фиг. 3) пневмоопора имеет камеру 11, на которой смонтирован одним бортом нижний упругий элемент 12 и кожух 13. Второй борт нижнего упругого элемента 12 соединен с переходником 14, который в свою очередь соединен с верхним упругим элементом 15, второй борт которого соединен с крышкой 16, имеющей фланец. Камера 11, упругие элементы 12 и 15, переходник 14 и крышка 16 образуют замкнутый объем, заполненный сжимаемой рабочей средой. Между переходником 14 и кожухом 13 в плоскости, прпендикулярной оси пневмоопоры, установлены попарно-встречно по двум перпендикулярным осям четыре пневмоупора 17. Пневмоупор 17 (фиг. 4) выполнен в виде упругой концентрической оболочки 18, закрытой с торцов внутренней 19 и наружной 20 крышками, расположенными по оси пневмоупора 17, при этом внутренняя крышка 19 снабжена пальцем 21, который входит в направляющую 22, выполненную в виде стакана, жестко закрепленного в переходнике 14, а наружная крышка 20 через прокладки 23 наперед заданной толщины соединяется с фланцем 24 кожуха 13.
Пневмоопора второго варианта (фиг. 5) содержит дополнительно эластичную диафрагму 25, установленную в отверстии основания резервуара 11, и тягу 26, установленную по оси пневмоопоры, прикрепленную посредством шарнира 17 к крышке 16 и герметично проходящую через центр диафрагмы 25.
Пневмоопора второго варианта работает следующим образом.
К летательному аппарату, установленному на домкраты, в определенных местах (не менее 3-х) закрепляют фланцы крышек 16 пневмоопор. На полу закрепляют основания камер 11. В пневмоупоры 17 подается сжатый воздух для обеспечения устойчивости летательного аппарата на пневмоопорах.
Затем сжатый воздух подается в основные рабочие объемы пневмоопор и они приподнимают испытуемый летательный аппарат над домкратами. После подъема летательного аппарата в исходное рабочее положение подача сжатого воздуха в пневмоопоры прекращается и производится корректировка давлений в пневмоупорах 17 для обеспечения требуемой боковой жесткости пневмоопор и положения летательного аппарата на них. В случае, если при максимальном рабочем давлении жесткость пневмоупоров 17 недостаточна для обеспечения устойчивости в поперечном направлении летательного аппарата на пневмоопорах, можно, не меняя упругих элементов 18 в пневмоупорах 17, установить в них новый комплект прокладок 23, уменьшающих рабочие объемы пневмоупоров 17.
Во время частотных испытаний производится возбуждение колебаний конструкции летательного аппарата. При вертикальном перемещении крышки 16 верхний упругий элемент 15 работает как пружина, жесткость которой определяется величиной внутреннего объема и давления воздуха в пневмоопоре, а переходник 14 при этом находится практически в неподвижном положении и удерживается от вертикальных перемещений за счет относительно высокой боковой жесткости пневмоупоров 17. При поперечном перемещении крышки 16 поперечная нагрузка через верхний упругий элемент 15 передается на переходник 14, который, поворачиваясь на нижнем упругом элементе 12, сжимает (растягивает) пневмоупоры 17, создающие необходимую для обеспечения устойчивости летательного аппарата на пневмоопорах восстанавливающую боковую силу. При поперечном смещении крышки 16 относительно упругого элемента 12 на подвижную часть пневмоопоры действует опрокидывающий момент, равный произведению доли веса летательного аппарата, воспринимаемой пневмоопорой, на величину поперечного смещения крышки 16. Этот момент компенсируется восстанавливающим моментом от поворотной жесткости упругих элементов 12 и 15 и за счет осевой и поворотной жесткости пневмоупоров 17, установленных в направлении движения крышки 16, а также за счет боковой жесткости пневмоупроров 17, установленных в направлении, перпендикулярном направлению движения крышки 16. Восстанавливающий момент от поворотной жесткости упругих элементов 12, 15 и пневмоупоров 17, установленных в направлении движения крышки 16, зависит от жесткостных свойств используемых элементов и составляет не более 10% полного восстанавливающего момента. Основная доля восстанавливающего момента возникает за счет осевой силы, создаваемой пневмоупорами 17, установленными в направлении движения крышки 16, и боковой силы, создаваемой пневмоупорами 17, установленными в направлении, перпендикулярном движению крышки 16. Таким образом, при изменении давления в пневмоупорах 17 происходит практически пропорциональное изменение их осевой и боковой жесткости и, следовательно, изменение поперечной жесткости пневмоопоры. Путем задания соответствующего давления в пневмоупорах 17 можно получить сколь угодно малую в сравнении с боковой жесткостью упругого элемента 15 боковую жесткость пневмоопоры, то есть получить сколь угодно малую частоту собственных поперечных колебаний летательного аппарата как твердого тела на пневмоопорах. Кроме этого, задаваясь различными давлениями во встречно установленных пневмоупорах, но сохраняя в них сумму исходных давлений, можно регулировать положение летательного аппарата на пневмоупорах в поперечном направлении с сохранением низменной поперечной жесткости пневмоопор. Благодаря высокой стабильности осевой и боковой жесткостей пневмоупоров 17 и пропорциональной зависимости этих жесткостей от внутреннего давления возможно с высокой точностью компенсировать опрокидывающий момент от веса и создать достаточно стабильную и в то же время малую поперечную жесткость пневмоопоры, то есть получить достаточно низкую частоту колебаний летательного аппарата как твердого тела на пневмоопорах. Таким образом, пневмоопора позволяет плавно и оперативно регулировать жесткость в поперечном направлении без изменения конструктивных параметров пневмоопоры, а также менять составляющую поперечной силы, передаваемой пневмоопорой на изделие для точной установки летательного аппарата в исходное рабочее положение.
При необходимости приложения возбуждающей силы, действующей по оси пневмоопоры, вибровозбудитель подсоединяется к тяге 26. Тогда усилие от вибровозбудителя через тягу 26 и шарнир 27 передается на крышку 16, жестко соединенную с летательным аппаратом.
Как видно из описания предполагаемого изобретения и прилагаемых схем, применение предлагаемой пневмоопоры в исследовании колебаний летательного аппарата позволит приблизить условия испытаний к усилиям свободного полета за счет снижения частоты поперечных колебаний летательного аппарата как твердого тела на пневмоопорах до частот не более 0,2 Гц, что позволит создать систему вывешивания для тяжелых ракет-носителей и, в частности, провести динамические испытания изделия 11Ф36.
Использование: изобретение относится к установкам для испытания машин и механизмов в условиях, приближенных к условиям полета. Сущность: пневмоопора по первому варианту отличается тем, что она снабжена расположенным на оси пневмоопоры дополнительным кольцевым упругим элементом диафрагменного типа, цилиндрическим переходником, удлинителем, выполненным в виде перфорированного цилиндра, и упругим шарниром, при этом верхний торец переходника соединен со вторым бортом основного упругого элемента, нижний торец переходника соединен с удлинителем и посредством элемента связан с верхним обрезом камеры, а нижний торец удлинителя через упругий шарнир связан с основанием камеры. Пневмоопора по второму варианту отличается тем, что она снабжена расположенным по ее оси дополнительным кольцевым упругим элементом диафрагменного типа и цилиндрическим переходником, а упругий пояс выполнен в виде пневмоупоров, установленных между кожухом и переходником в плоскости, перпендикулярной оси пневмоопоры, при этом верхний торец переходника соединен со вторым бортом основного упругого элемента, а нижний торец переходника соединен посредством дополнительного упругого элемента с верхним обрезом камеры. 2 с. и 2 з.п.ф-лы, 5 ил.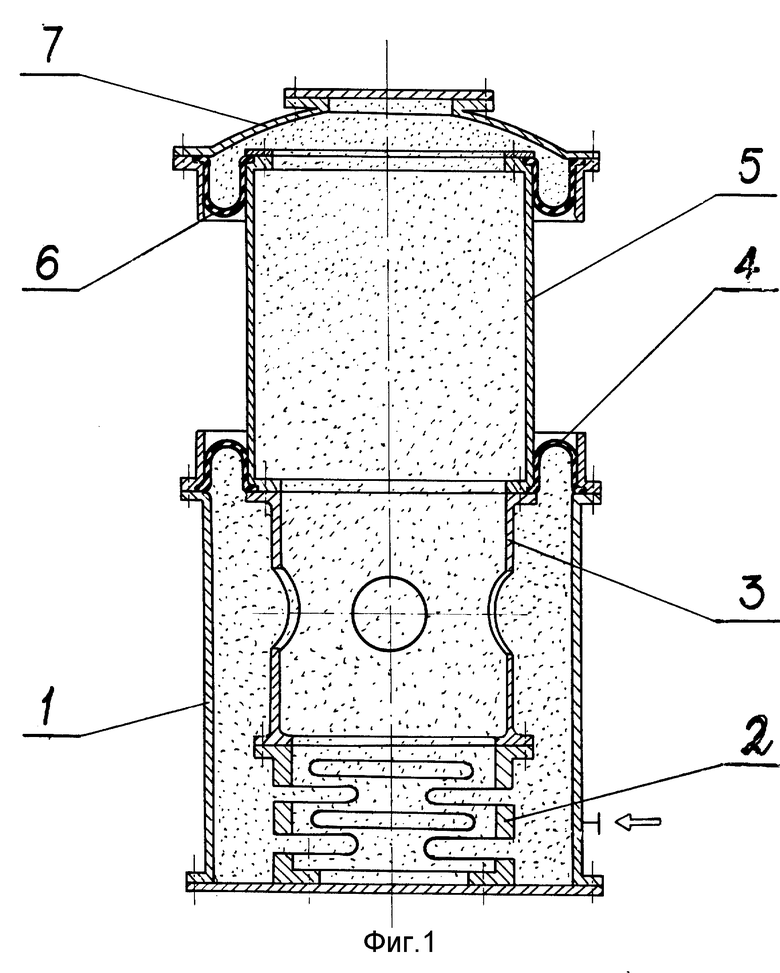
| М.М.Грибов | |||
| Регулируемые амортизаторы РЭА | |||
| - М.: Советское радио, 1974, с.130-131, рис.7.5. |
