Изобретение относится к области морской радиолокационной техники, в частности к зеркальным антенным устройствам судовых радиолокационных станций.
Судовые РЛС предназначены для обеспечения безопасности судовождения в любое время года, суток, в условиях темного времени суток, в тумане и в других сложных условиях мореплавания. На судах морского флота в указанных условиях, а также в условиях хорошей видимости при плавании вблизи берегов, судовые РЛС работают практически непрерывно, обеспечивая отображение на экране станции внешней надводной обстановки.
Характеристики судовых РЛС в значительной степени определяются конструкцией и тактико-техническими данными их антенных устройств.
К основным характеристикам антенных устройств относятся диаграммы направленности антенны в горизонтальной и вертикальной плоскостях; коэффициент усиления антенны; уровень боковых лепестков; частота вращения антенны.
Диаграмма направленности антенны РСЛ в горизонтальной плоскости характеризует точность определения направления на обнаруженную цель. Для СНРЛС характерными величинами диаграммы направленности по половинной мощности являются 0,8 + 2,2 гр.
Диаграмма направленности антенны в вертикальной плоскости определяет возможность обнаружения надводных целей в условиях качки судна. Характерными величинами для современных станций являются диаграммы направленности величиной 20 + 30 гр., обеспечивающие нормальную работоспособность станций при углах крена до 10 + 15 гр.
Коэффициент усиления антенны определяет эффективность судовых РЛС по обнаружению различных целей.
Уровень боковых лепестков характеризует судовые РЛС с точки зрения возможности получения на экране индикатора станции ложных целей. Уровень боковых лепестков у антенн современных судовых РЛС ниже уровня основной диаграммы на 20 + 30 дБ.
Частота вращения антенны измеряется числом оборотов в минуту и для современных станций равна 14 + 30 об/мин.
В судовых РЛС в настоящее время наибольшее распространение находят волноводно-щелевые и зеркальные антенны РЛС.
В качестве прототипа предлагаемого антенного поста выбираем антенный пост с зеркальной антенной.
Антенный пост прототипа, как и антенные посты существующих РЛС, обладают одним существенным недостатком, заключающимся в отсутствии стабилизации диаграммы направленности антенны в вертикальной плоскости.
Анализ функционирования судовых РЛС на качке судна показывает, что во время качки станция с нестабилизированным антенным постом будет иметь значительно меньшую дальность обнаружения надводных целей, а при углах качки, близких к максимальным, вообще будут наблюдаться пропуски в обнаружении целей.
Для количественной оценки величины потерь в обнаружении целей рассмотрим условия функционирования РЛС на судах при наличии качки.
Для существующих судовых РЛС с нестабилизированным антенным постом условия обнаружения надводных целей будут зависеть от углов качки судна и формы диаграммы направленности (ДН) антенны в вертикальной плоскости. Известно [К. В. Голев. Расчет дальности действия радиолокационных станций. Москва. 1962 г.], что дальность действия РЛС в освещенной зоне - D можно определить из выражения
где Cm - энергетическая характеристика СНРЛС в максимуме ДН антенны РЛС;
s - эффективная площадь рассеяния цели;
& - отношение энергии принимаемого сигнала к энергии шумов;
F[fг, fв] - характеристика направленности антенны РЛС по напряженности поля;
fг, fв - углы смещения ДН антенны от оси в горизонтальной и вертикальной плоскости соответственно;
V - множитель ослабления радиоволн в приводном слое.
На расстояниях, меньших 30% дальности радиогоризонта, когда кривизной земной поверхности можно пренебречь, с учетом малых величин разности фаз прямого и отраженного от поверхности моря сигналов в районе цели, получим
где h[1] , h[2] - высоты антенны СНРЛС и эффективного центра отражения цели;
L - длина волны.
Анализ приведенных выражений показывает, что изменение дальности действия судовых РЛС, при прочих равных условиях, прямо пропорционально изменению величины диаграммы направленности антенны судовой РЛС по напряженности поля, а изменение дальности действия из-за изменения множителя ослабления за счет колебаний величин высот антенны и цели, а также за счет этого дальности из-за качки судна и цели при волнении моря незначительны.
Для получения количественной оценки изменения дальности обнаружения надводных целей судовой РЛС на качке зададимся диаграммой направленности антенны по напряженности в виде [Справочник по радиолокации. Под ред. М. Сколника. М. Сов. радио. 1976 г.]:
где Cm - максимальный коэффициент усиления антенны по мощности;
KC - коэффициент сужения ДН по отношению к ДН полуволнового вибратора.
Для расчетов относительного изменения дальности действия судовой РЛС на качке в направлении бортовых курсовых углов используем выражение:
где Dm - максимальная дальность обнаружения цели при отсутствии качки;
n - номер вычисления значения D/Dm;
nm - общее число суммируемых результатов вычислений;
KC = 60/Qв-, где Qв - ширина ДН антенны по мощности в вертикальной плоскости.
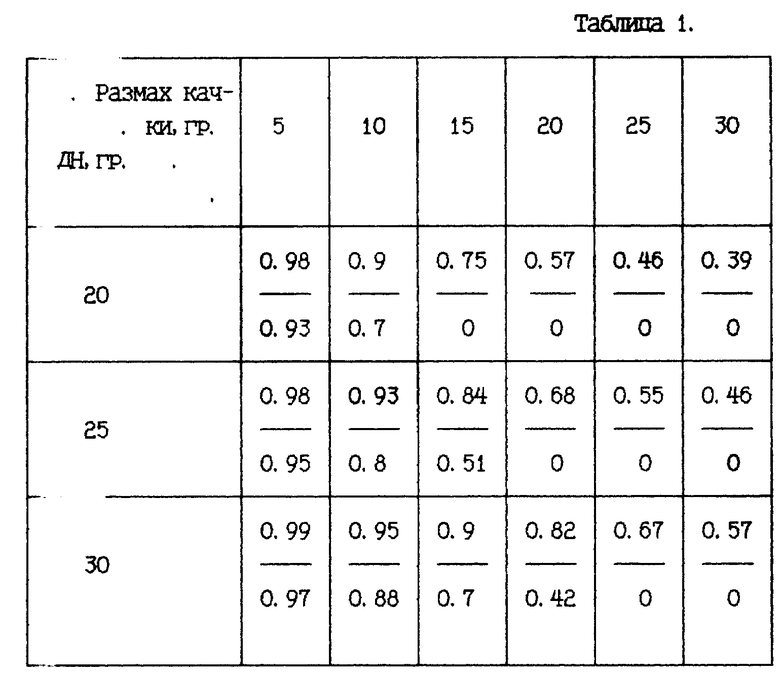
Результаты выполненных на ПЭВМ расчетов средних за период качки величин относительной дальности (в числителе) и величин относительной дальности при максимальных углах крена (в знаменателе) для различных значений максимальных углов крена судна и величин диаграмм направленности антенны в вертикальной плоскости представлены в таблице 1. Расчеты проводились при nm = 50.
Анализ результатов расчетов показывает, что во время качки судна судовая РЛС с нестабилизированным антенным постом будет иметь значительно меньшую дальность обнаружения надводных целей, а при углах качки, близких к максимальным, вообще будут наблюдаться пропуски в обнаружении целей.
Использованию в судовых РЛС существующих стабилизированных антенных постов РЛС управления оружием и обнаружения воздушных целей препятствует их сложность, необходимость установки на судне датчика углов качки и, как следствие этого, значительное повышение сложности и стоимости судовых РЛС.
Сущность изобретения заключается в том, что с целью стабилизации диаграммы направленности (ДН) антенны судовой РЛС, состоящей из зеркального отражателя и облучателя, в вертикальной плоскости во время качки судна и повышения тем самым надежности обнаружения целей в морских условиях, а также обеспечения возможности уменьшения ширины ДН стабилизированной антенны для повышения энергетического потенциала и дальности действия РЛС или для снижения излучаемой и потребляемой от сети мощности при неизменной дальности действия и повышения экологической чистоты РЛС, сканируют луч ДН антенны в вертикальной плоскости, обеспечивая сохранение на качке заданного направления ДН, путем поочередного использования для излучения и приема радиоволн нескольких облучателей антенны, расположенных в фокусе отражателя и по обе стороны от него, смещенных в вертикальной плоскости относительно друг друга на углы не менее половины ширины ДН; производят последовательное подключение соседних облучателей к СВЧ тракту РСЛ; управляют таким последовательным подключением к СВЧ тракту РЛС различных облучателей без затраты энергии за счет использования свойств физического маятника и сил земного притяжения.
С целью реализации указанного выше способа стабилизации ДН антенны в вертикальной плоскости в состав антенного поста судовой РЛС, включающего зеркальный отражатель и облучатель, дополнительно включены несколько дополнительных облучателей, расположенных по вертикали вверх и вниз от основного на одинаковых с основным облучателем расстояниях от центра зеркального отражателя; СВЧ переключатель, обеспечивающий последовательное подключение к СВЧ тракту указанных дополнительных облучателей за счет углового перемещения переключающего элемента T среднего положения, при котором подсоединен основной облучатель, вверх или вниз, в зависимости от направления и величины угла крена; физический маятник из отвеса и груза, жестко соединенный отвесом с горизонтальной осью СВЧ переключателя и обеспечивающий, под действием силы земного притяжения, зависимое от качки судна последовательное подключение СВЧ тракта РЛС к соответствующему дополнительному облучателю антенны для смещения луча ДН антенны на имеющий место в данный момент угол крена в противоположную крену сторону и обеспечения тем самым неизменным, т. е. стабилизированным, положения ДН антенны в вертикальной плоскости.
Фиг. 1. Схема конструкции антенного поста в исходном положении. Вид сбоку.
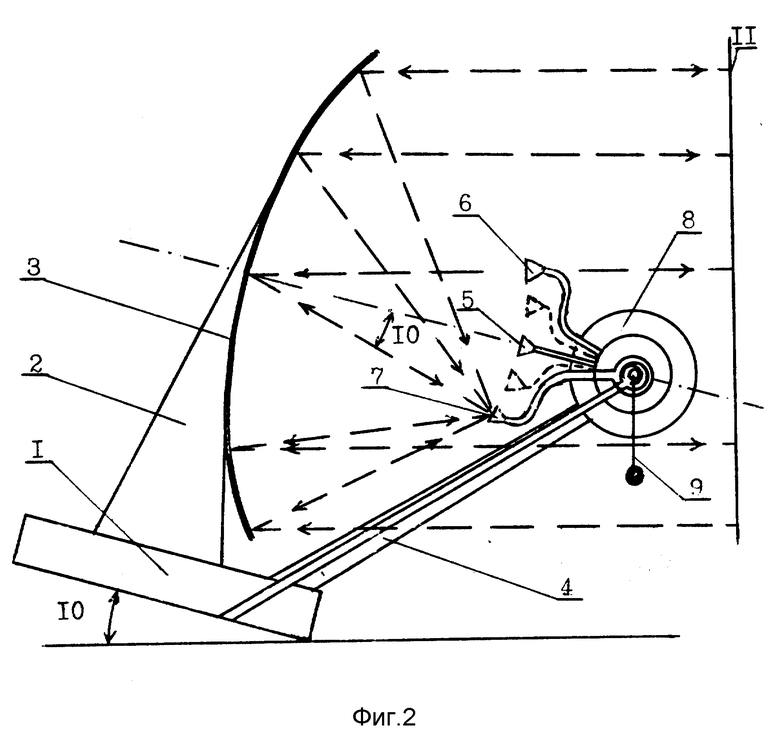
Фиг. 2. Схема конструкции антенного поста при крене в сторону излучения. Вид сбоку.
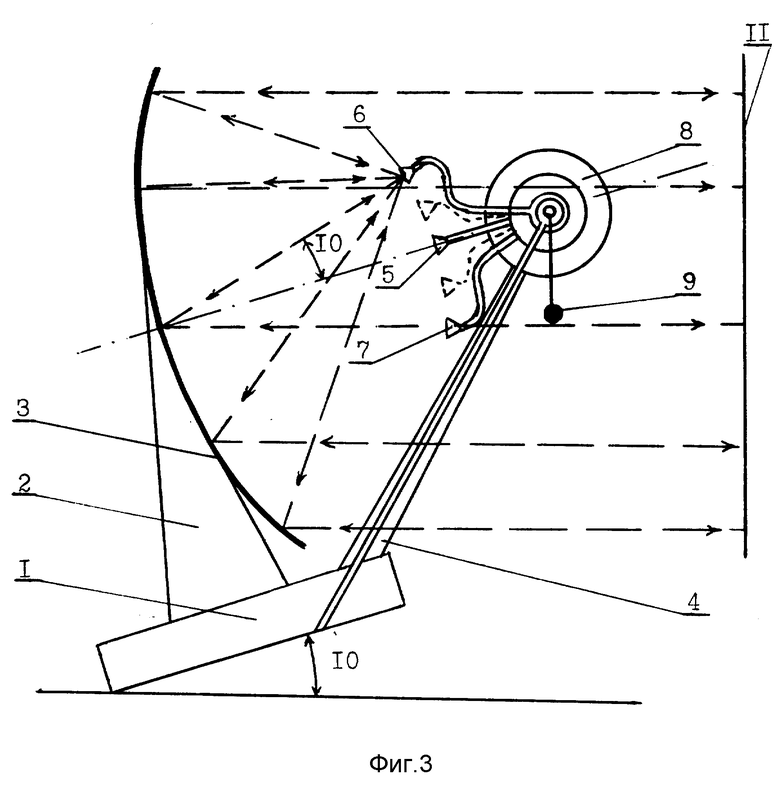
Фиг. 3. Схема конструкции антенного поста при крене в сторону, обратную направлению излучения. Вид сбоку.
Возможность стабилизации ДН зеркальной антенны основано на использовании известного способа сканирования ДН путем смещения облучателя зеркальной антенны из фокуса зеркального отражателя.
Такой способ изменения положения оси ДН широко используется в радиолокации. На этом принципе основан, например, обзор пространства по высоте в высотомерах, в которых сканирование луча антенны по высоте осуществляется путем качания зеркального отражателя антенны в вертикальной плоскости относительно неподвижного облучателя антенны.
На этом же принципе основан обзор участка поверхности моря или суши в РЛС управления стрельбой за счет быстрого перемещения луча антенны в заданном секторе обзора по азимуту и воспроизведения на экране индикатора типа B просматриваемого участка поверхности.
О возможных максимальных углах сканирования луча зеркальных антенн указывается в литературе (см. Справочник по радиолокации под редакцией М. Сколник. Сов. радио. М. 1973 г. т. 2, стр. 109 - 117). Отмечается, что антенна со сферическим зеркалом обеспечивает сканирование луча ДН антенны без значительных искажений в пределах угла 140 градусов. Антенна с отражателем в виде параболического тора обеспечивает качание луча ДН антенны в угле до 120 градусов.
В отечественной литературе (см. например В.М. Гинсбург, И.Н. Белова. Расчет параболических антенн. Сов. радио. 1959 г.) изложена методика расчета ДН зеркальных антенн как при расположении облучателя в фокусе отражателя, так и при выносе облучателя с качанием луча ДН антенны в секторе до 10 и более градусов. Здесь же отмечается, что при отклонении луча антенны на углы больше 10 гр. будут наблюдаться искажения формы ДН антенны. Для устранения этого приведены результаты расчетов ДН с корректурой ее формы при отклонении луча антенны на большие углы качания.
Для обеспечения стабилизации луча ДН судовой антенны необходимо качание луча в пределах характерных для морских судов максимальных углов крена, которые лежат в пределах 30 - 40 градусов.
Из изложенного следует, что практическое использование зеркальных антенн для стабилизации ДН антенны судовых РЛС на качке судна путем отклонения луча ДН антенны за счет перемещения облучателя, широко используемого в радиолокации, вполне осуществимо.
При этом необходимо учесть, что нет необходимости предъявлять жесткие требования к сохранению неизменной формы ДН антенны при качании луча в вертикальной плоскости, т.к. функции по измерению пеленга на цель несет ДН антенны в горизонтальной плоскости, искажения которой при качании ДН в вертикальной плоскости незначительны.
Принципиальная схема конструкции антенного поста судовой РЛС, реализующего предлагаемый способ, в исходном положении, при нахождении судна на ровном киле, представлена на фиг. 1.
Антенный пост состоит из основания антенны 1 и укрепленных на нем двух боковых стоек 2, в верхней части которых укреплен зеркальный отражатель антенны 3.
В геометрическом центре отражателя укреплен кронштейн облучателей 4 с СВЧ трактом. В фокусе зеркального отражателя расположен основной облучатель 5. Выше и ниже основного облучателя, на том же расстоянии, что и основной облучатель, размещены верхний - 6 и нижний - 7 дополнительные облучатели. Указанные три облучателя соединены между собой и с кронштейном 4 корпусом СВЧ переключателя 8, ось которого расположена горизонтально. На оси СВЧ переключателя 8 сбоку жестко укреплен маятник 9 с отвесом и грузом.
В исходном положении, при отсутствии качки и нахождении судна на ровном киле, энергия радиоволн при излучении и приеме сигналов подводится по СВЧ тракту, расположенному в кронштейне 4, и через СВЧ переключатель 8 соединяется с основным облучателем 5. При этом, при излучении радиоволн происходит облучение зеркального отражателя 3 и излучение радиоволн в пространство. Антенное устройство формирует в дальней зоне заданную ДН с осью, расположенной в горизонтальной плоскости параллельно земной поверхности, для РЛС обнаружения надводных целей, с фронтом радиоволн антенны в дальней зоне - 11.
При приеме радиоволн приходящая отраженная целями энергия фокусируется зеркальным отражателем 3 в фокусе отражателя - в месте расположения основного облучателя 5 и через облучатель 5 и СВЧ переключатель 8 поступает в СВЧ тракт РЛС.
Таким образом обеспечивается функционирование антенного поста РЛС при отсутствии качки.
Рассмотрим процесс функционирования антенного поста во время качки судна.
При крене судна с антенной РЛС в сторону излучения на угол 10 (фиг. 2) маятник 9 сохранит вертикальное положение своего отвеса, жестко соединенного с переключающим элементом СВЧ переключателя 8, который обеспечит соединение СВЧ тракта РЛС с нижним дополнительным облучателем 7, смещенным по отношению к оси зеркального отражателя на угол 10. Такое смещение облучателя вызовет смещение оси ДН антенны вверх также на угол 10, обеспечивая сохранение горизонтального положения оси ДН антенны в вертикальной плоскости неизменным.
Аналогичным образом будет обеспечиваться стабилизация ДН антенны и при крене судна в сторону, обратную направлению излучения (фиг. 3).
В промежуточных положениях наклона антенны СВЧ переключатель будет соединять СВЧ тракт РЛС с двумя соседними облучателями, обеспечивая работу РЛС при промежуточных углах качки. Используя набор из групп дополнительных облучателей сверху и снизу основного облучателя (как показано на фиг. 1 пунктиром), можно обеспечить плавное переключение соседних положений ДН антенны во время качки судна без значительных искажений ДН антенны.
При вращении антенны в горизонтальной плоскости антенна и ее ось ДН в горизонтальной плоскости будут занимать по отношению к диаметральной плоскости (курсу) судна различные направления.
При направлении ДН антенны вдоль диаметральной плоскости судна назад или вперед величина наклона антенны от килевой качки и боковой наклон антенны от бортовой качки не будут влиять на положение ДН антенны в вертикальной плоскости. Условия наблюдения целей для РЛС сохранятся неизменными.
По мере поворота антенны в сторону борта (курсового угла 90 гр.) составляющая крена будет возрастать. По мере возрастания крена антенного поста, подвижная система антенного поста будет постоянно сохранять первоначальное положение физического маятника в вертикальной плоскости, обеспечивая сохранение заданного положения оси ДН антенны в вертикальной плоскости.
Изложенное подтверждает возможность технического осуществления предлагаемого устройства.
Внедрение предлагаемого устройства обеспечит получение целого ряда преимуществ.
При использовании предлагаемого антенного поста практически исключаются какие-либо изменения дальности обнаружения целей на качке.
Для подтверждения возможности стабилизации антенны по предложенному способу рассмотрим закономерности движения подвижной части конструкции, представляющей собой физический маятник, на качке судна.
Закономерности качания физического маятника широко используются для стабилизации в пространстве картушки судовых магнитных компасов. Массивный свинцовый поддон корпуса картушки обеспечивает сохранение верхней плоскостью картушки, установленной на карданном подвесе, строго горизонтального положения.
Для своевременной отработки корпусом картушки, являющимся в рассматриваемом случае физическим маятником, углов качки судна период ее собственных колебаний должен быть значительно меньше периода качки судна.
Физическим маятником является абсолютно твердое тело, совершающее под действием силы тяжести колебания вокруг горизонтальной оси, проходящей через его центр тяжести [Справочник по физике. Яворский Б.М., Детлаф А.А. Наука. М. 1978 г.].
Период колебаний физического маятника определяется соотношением
где J - момент инерции тела относительно оси качания;
m - масса физического маятника;
d - длина физического маятника;
g - ускорение силы тяжести.
Если мы рассматриваем качание тела сложной формы, состоящего из n отдельных составляющих, момент инерции такого тела относительно оси качания - J определяется как сумма произведений масс всех составляющих частей тела на квадраты их расстояний от той же оси r[i].
Аналогично для суммарной величины md такого тела справедливо равенство
Используем полученные выражения для определения периода колебаний качающихся деталей предлагаемой конструкции антенного поста судовой РЛС.
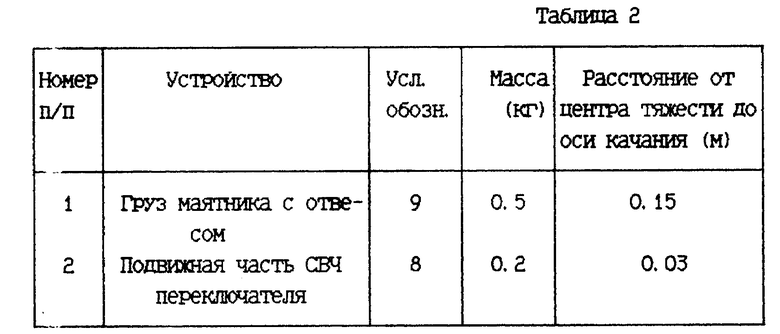
Принятые для расчетов данные приведены в таблице 2.
Результаты расчетов показывают, что период колебаний рассматриваемого физического маятника будет равен 0,753 сек. Период бортовой качки морских судов, в зависимости от их размеров и конструкции корпуса, колеблется от 7 до (20 + 30) сек. [В.В. Ашин Проектирование судов. Л. "Судостроение", 1985 г. ]. Это на порядок и больше превышает период колебаний предлагаемой в заявке качающейся части антенны, что исключает возможность возникновения побочных колебаний качающихся частей антенны во время качки судна.
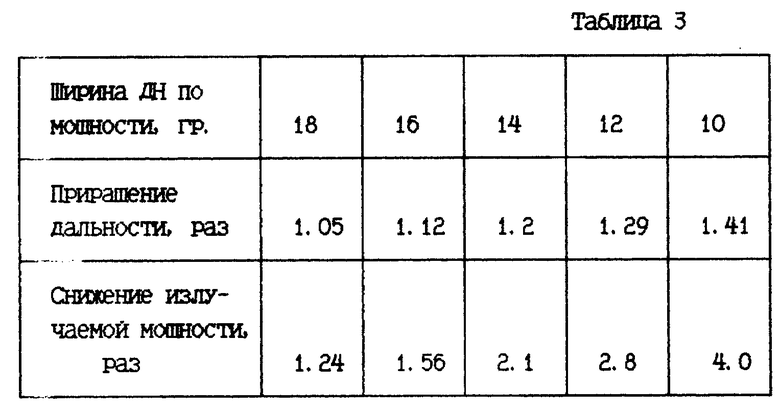
Стабилизация оси ДН антенны судовой РЛС в вертикальной плоскости для улучшения условий наблюдения целей в условиях качки судна открывают возможность оптимизации ширины диаграммы направленности антенны в вертикальной плоскости в сторону ее уменьшения.
В таблице 3 представлены результаты расчетов количественного повышения дальности обнаружения надводных целей или уменьшения энергетической характеристики РЛС в зависимости от величины диаграммы направленности антенны в вертикальной плоскости по сравнению с РЛС, имеющей ДН в 20 гр.
Изложенное позволяет сделать следующие выводы.
1. Предлагаемые способ и устройство стабилизации ДН антенны судовой РЛС обеспечивают стабилизацию оси ДН антенны в вертикальной плоскости без затраты энергии, с использованием силы притяжения Земли и закономерностей физического маятника.
2. Предлагаемая конструкция стабилизированной антенны РЛС технически реализуема и работоспособна.
3. Стабилизация положения диаграммы направленности антенны в вертикальной плоскости улучшает условия и повышает надежность обнаружения морских целей в условиях качки судна, а при больших углах качки исключает возможные пропуски в обнаружении целей.
4. Использование предлагаемого стабилизированного антенного поста обеспечивает возможность уменьшения ширины ДН антенны в вертикальной плоскости и повышения за счет этого энергетической характеристики РЛС или, при сохранении неизменной дальности обнаружения целей, позволяет уменьшить излучаемую передатчиком РЛС мощность и величину потребляемой от бортсети судна энергии.
5. Уменьшение ширины диаграммы направленности антенны РЛС в вертикальной плоскости, а также возможное снижение излучаемой станцией мощности обеспечит уменьшение уровней СВЧ энергии на палубе и надстройках судна и повышение экологической чистоты РЛС.
6. Существенным преимуществом предлагаемого устройства является исключительная простота его внедрения в существующие антенные посты. В процессе внедрения устройства необходимо только заменить имеющийся облучатель антенны на новый, обеспечивающий согласованное с качкой судна сканирование оси ДН антенны в вертикальной плоскости и стабилизацию положения ДН антенны в вертикальной плоскости.
Изобретение относится к радиолокации, в частности к антенным устройствам судовых РЛС. Достигаемый технический результат - стабилизация диаграммы направленности (ДН) антенны в условиях качки, что достигается поочередным использованием для излучения и приема нескольких облучателей зеркальной антенны, расположенных в фокусе ее отражателя и по обе стороны от него, смещенных в вертикальной плоскости относительно друг друга на углы, не меньшие половины ширины ДН. Устройство, реализующее способ, включает в свой состав, кроме отражателя и облучателей, СВЧ-переключатель, управляемый физическим маятником, состоящим из отвеса и груза. 2 с.п. ф-лы, 3 ил., 3 табл.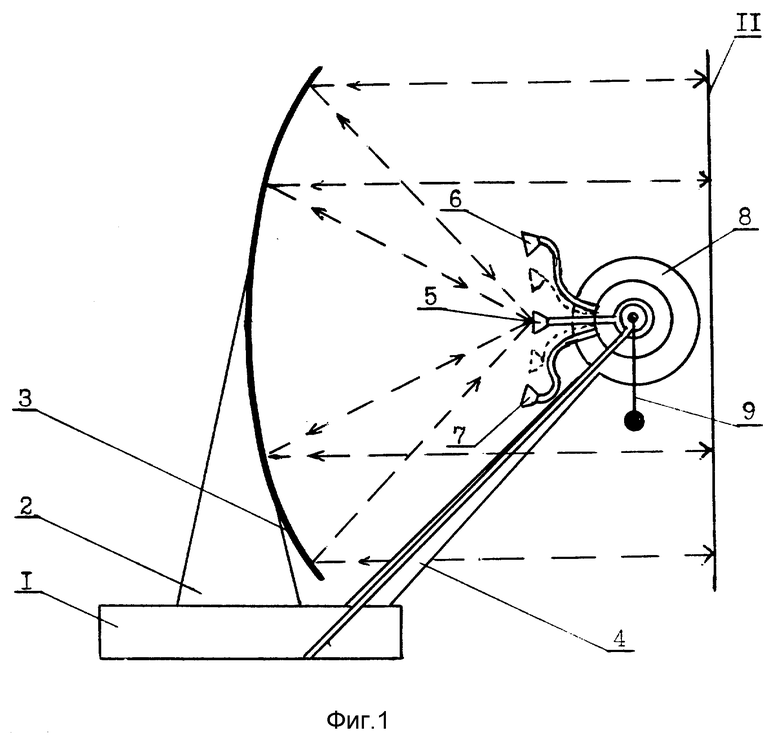
| Кюн Р | |||
| Микроволновые антенны (Антенны сверхвысоких частот) | |||
| - Л.: Судостроение, 1967, с.344, 356 - 358, рис.7.59, 7.60 | |||
| Демидов В.П | |||
| и др | |||
| Управление зенитными ракетами | |||
| - М.:Военное издательство, 1989, с.116 - 118 | |||
| Моноимпульсная антенная система | 1986 |
|
SU1443065A1 |
| US 3623094 A, 23.11.71 | |||
| Полюсопереключаемая обмотка | 1988 |
|
SU1601705A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
