Изобретение относится к области морской радиолокационной техники, в частности к зеркальным антенным устройствам судовых радиолокационных станций (СНРЛС).
СНРЛС предназначены для обеспечения безопасности судовождения в любое время года, суток, в условиях темного времени суток, в тумане и в других сложных условиях мореплавания. На судах морского флота в указанных условиях, а также в условиях хорошей видимости при плавании вблизи берегов СНРЛС работают практически непрерывно, обеспечивая отображение на экране станции внешней надводной обстановки.
Характеристики СНРЛС в значительной степени определяются конструкцией и тактико-техническими данными их антенных устройств. К основным характеристикам антенных устройств относятся:
- диаграммы направленности антенны в горизонтальной и вертикальной плоскостях;
- коэффициент усиления антенны;
- уровень боковых лепестков;
- частота вращения антенны.
Диаграмма направленности антенны СНРЛС в горизонтальной плоскости характеризует точность определения направления на обнаруженную цель. Для СНРЛС характерными величинами диаграммы направленности по половинной мощности являются 0.8+2.2o.
Диаграмма направленности антенны в вертикальной плоскости определяет возможность обнаружения надводных целей в условиях качки судна. Характерными величинами для современных станций являются диаграммы направленности величиной 20+30o, обеспечивающие нормальную работоспособность станций при углах крена до 10+15o.
Коэффициент усиления антенны определяет эффективность СНРЛС по обнаружению различных целей.
Уровень боковых лепестков характеризует СНРЛС с точки зрения возможности получения на экране индикатора станции ложных целей. Уровень боковых лепестков у антенн современных СНРЛС ниже уровня основной диаграммы на 20+30 дБ.
Частота вращения антенны измеряется числом оборотов в минуту и для современных станций равна 14+30 об/мин.
В судовых РЛС в настоящее время наибольшее распространение находят волноводно-щелевые и зеркальные антенны РЛС.
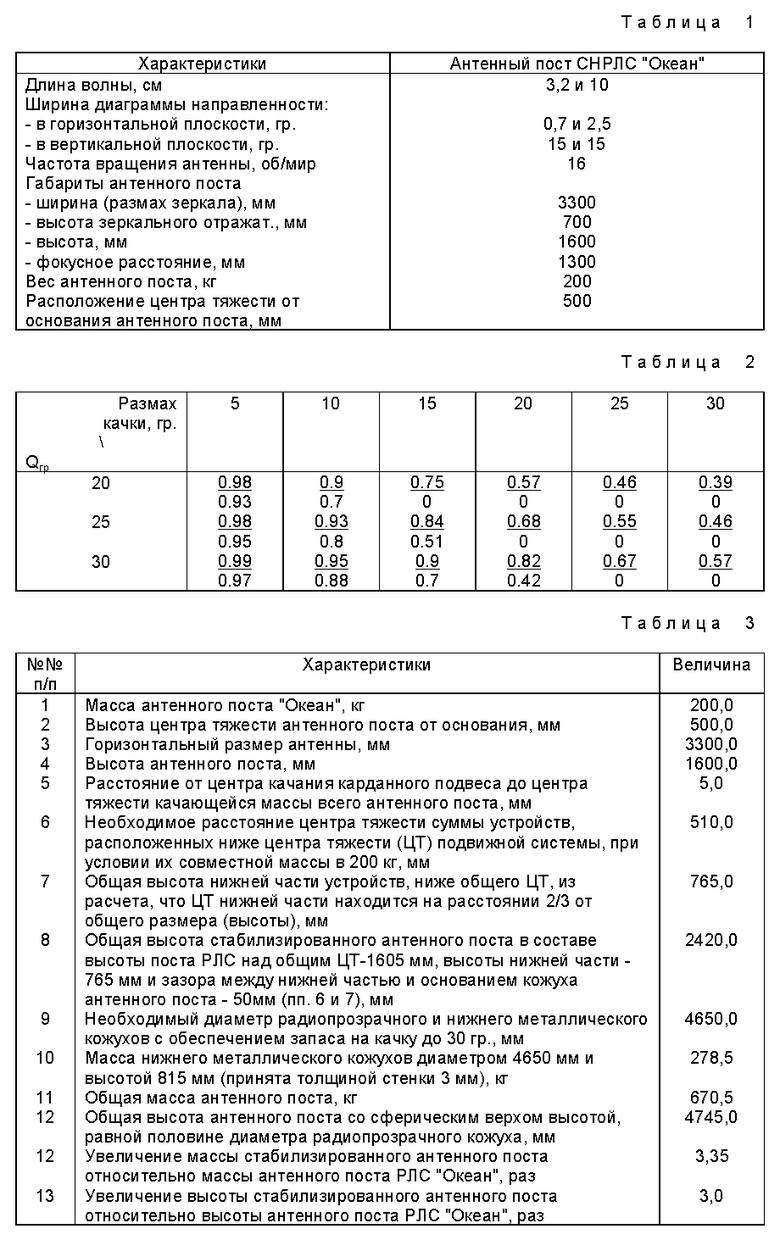
В табл. 1 приведены основные характеристики антенного поста с зеркальной антенной отечественной СНРЛС "Океан", взятые из справочного руководства "Судовые радиолокационные станции и их применение", В.А. Аверьянов, А.М. Байрашевский и др.- Л.: Судостроение, 1970, с. 24-34.
Указанный в табл. 1 антенный пост, как и антенные посты практически всех существующих СНРЛС, обладаeт одним существенным недостатком, заключающимся в отсутствии стабилизации диаграммы направленности антенны в вертикальной плоскости.
Для количественной оценки величины потерь в обнаружении целей рассмотрим условия функционирования СНРЛС на судах при наличии качки.
Для существующих СНРЛС с нестабилизированным антенным постом условия обнаружения надводных целей будут зависеть от углов качки судна и формы ДН антенны в вертикальной плоскости. Известно [К.В. Голев. Расчет дальности действия радиолокационных станций.- М., 1962 г.], что дальность действия РЛС в освещенной зоне - D можно определить из выражения:
где
Cm - энергетическая характеристика СНРЛС в максимуме ДН антенны СНРЛС;
S - эффективная площадь рассеяния цели;
& - отношение энергии принимаемого сигнала к энергии шумов;
F[fг, fв] - характеристика направленности антенны РЛС по напряженности поля;
fгf, fв - углы смещения ДН антенны от оси в горизонтальной и вертикальной плоскости, соответственно;
U - множитель ослабления радиоволн в приводном слое.
На расстояниях, меньших 30% дальности радиогоризонта, когда кривизной земной поверхности можно пренебречь, с учетом малых величин разности фаз прямого и отраженного от поверхности моря сигналов в районе цели, получим: ,(2)
,(2)
где
h[1], h[2] - высоты антенны СНРЛС и эффективного центра отражения цели;
L - длина волны.
Анализ приведенных выражений показывает, что изменение дальности действия СНРЛС при прочих равных условиях прямо пропорционально изменению величины диаграммы направленности антенны СНРЛС по напряженности поля, а изменение дальности действия из-за изменения множителя ослабления за счет колебаний величин высот антенны и цели, а также дальности из-за качки судна и цели при волнении моря незначительны.
Для получения количественной оценки изменения дальности обнаружения надводных целей СНРЛС на качке зададимся диаграммой направленности антенны по напряженности в виде [Справочник по радиолокации/Под ред. М. Сколника.- М.: Сов.радио, 1976 г.]: , (3)
, (3)
где
Gm - максимальный коэффициент усиления антенны по мощности;
КС - коэффициент сужения ДН по отношению к ДН полуволнового вибратора.
Для расчетов относительного изменения дальности действия СНРЛС на качке в направлении бортовых курсовых углов используем выражение: , (4)
, (4)
где
Dm - максимальная дальность обнаружения цели при отсутствии качки;
n - номер вычисления значения D/Dm;
nm - общее число суммируемых результатов вычислений;
КС = 60/Q[0,5в] , где Q[0,5в] - ширина ДН антенны по мощности в вертикальной плоскости.
Результаты выполненных на ПЭВМ расчетов средних за период качки величин относительной дальности (в числителе) и величин относительной дальности при максимальных углах крена (в знаменателе) для различных значений максимальных углов крена судна и величин диаграмм направленности антенн в вертикальной плоскости представлены в табл. 2. Расчеты проводились при nm = 50.
Анализ результатов расчетов показывает, что во время качки судна СНРЛС с нестабилизированным антенным постом будет иметь значительно меньшую дальность обнаружения надводных целей, а при углах качки, близких к максимальным, вообще будут наблюдаться пропуски в обнаружении целей.
Известно несколько способов стабилизации диаграммы направленности антенны РЛС. В частности, из технической литературы [Самойлов Л.К. Электронное управление характеристиками направленности антенн.- Л.: Судостроение, 1987, с. 8, 10 (табл. 1.1), 20 (последний абзац), 21 (последний абзац и рис. 1.10)] известен способ стабилизации характеристики направленности антенны РЛС в пространстве, в частном случае применения, когда носителем антенны является подверженное бортовой, килевой качке и рысканию по курсу судно, согласно которому устройство формирования управляющих воздействий (гироазимутгоризонт) вырабатывает сигналы управления, поступающие на блок электронного формирования характеристик направленности и корректирует их, обеспечивая стабильное положение в пространстве (для типа антенн с возможностью электронного управления положением оси диаграммы направленности).
Для антенн, в которых возможность электронного управления положением оси диаграммы направленности отсутствует, сигналы управления от гироазимутгоризонта поступают на механические устройства, обеспечивающие сохранение неизменным положение антенного поста или антенны РЛС относительно морской поверхности.
Использование электронного или электромеханического принципа стабилизации антенны СНРЛС с использованием управляющих воздействий от специального датчика (гироазимутгоризонта) для СНРЛС неприемлемо из-за неоправданно высокой сложности аппаратуры и стоимости такого способа стабилизации, особенно за счет необходимости установки на судне специального датчика (гироазимутгоризонта).
Значительным преимуществом обладают стабилизированные антенные посты РЛС, основанные на использовании силы земного притяжения, свойств физического маятника и гироскопов. Примером такого антенного поста является стабилизированная платформа антенного поста за счет совместного использования гироскопа и маятника, заявленная в патенте США от 1.07.75 N 3.893.123 по классификации США 343/709 (по международной классификации H 01 Q 3/00). Указанный антенный пост в составе стабилизированной платформы по патенту США и установленного на ней антенного поста СНРЛС "Океан" выбран нами в качестве прототипа заявляемого стабилизированного антенного поста навигационной радиолокационной станции.
Заявленная в указанном патенте США стабилизированная платформа антенной системы, на наш взгляд, имеет следующие общие с предлагаемым антенным постом признаки: пост судовой радиолокационной станции, состоящий из антенного поста РЛС, установленного на стабилизированной платформе, антенна которого укреплена с помощью кронштейна на тумбе, установленной на основании антенного поста, имеющего мотор и привод вращения, причем стабилизация верхней площадки стабилизированной платформы с установленным на ней антенным постом РЛС осуществляется за счет использования силы земного притяжения и свойств физического маятника и гироскопа, причем весь стабилизированный антенный пост закрыт радиопрозрачным кожухом.
Из описания заявленного в патенте устройства следует, что под неподвижным радиопрозрачным кожухом устанавливается на стабилизированную платформу антенный пост любой существующей конструкции, в частности может быть установлен антенный пост СНРЛС, например отечественной станции "Океан" (см. табл. 1). При этом конструкция антенного поста остается неизменной.
Стабилизированная платформа представляет собой площадку, имеющую возможность сохранять горизонтальное положение за счет использования карданова подвеса, внешняя ось которого укреплена в верхней части неподвижного металлического кожуха, установленного на мачте или на надстройке судна. Снизу площадки укреплен металлический кожух с присоединенным мотором, вертикальная ось которого расположена по центру подвижной системы карданова подвеса, стабилизированной платформы и установленного на платформе антенного поста РЛС. Ось мотора проходит в отверстие кожуха внутрь кожуха. Внутри кожуха на оси мотора укреплен гироротор, приводимый во вращение мотором.
Соосно оси мотора и ротора снизу мотора укреплен нарезной штырь, на который наворачивается и стопорится снизу гайкой груз, обеспечивающий сохранение платформой с антенным постом в статике горизонтального положения. Масса груза и его расстояние ниже осей карданова подвеса платформы должны обеспечивать расположение центра тяжести всей подвижной системы ниже центра оси карданова подвеса платформы. Для повышения точности стабилизации платформы за счет силы земного притяжения используется указанный гироротор, приводимый в быстрое вращение мотором.
К недостаткам стабилизированного антенного поста по патенту США, выбранного нами в качестве прототипа, следует отнести недопустимо большие для антенны СНРЛС массогабаритные характеристики.
В подтверждение этого определим характеристики такого стабилизированного поста с антенной СНРЛС "Океан" (см. табл. 1) и стабилизированной платформы по патенту США N 3.860.931. Исходные для расчетов данные и результаты расчетов сведены в табл. 3.
Анализ полученных результатов использования прототипа - стабилизированной платформы антенной системы по патенту США N 3.893.123 от 1.07.75 для стабилизации антенного поста СНРЛС "Печора-2" показывает, что такое техническое решение связано с недопустимым увеличением для антенных постов СНРЛС массогабаритных характеристик (массы в 3.26, высоты в 5.2 разa), а также необходимостью непрерывной работы мотора гироротора и затрат дополнительной электроэнергии. В связи с этим рассмотренная система стабилизации диаграммы направленности антенны СНРЛС не может быть рекомендована для практического использования на судах.
Сущность изобретения состоит в том, что стабилизированная зеркальная антенна судовой РЛС, состоящая из антенного поста РЛС, установленного на стабилизированной платформе, закрытого вместе с платформой радиопрозрачным кожухом, в составе зеркального отражателя с облучателем, установленного на вращающемся по горизонту кронштейне, размещенном на основании, имеющим мотор вращения антенны с приводом, антенна соединена с приемопередающей аппаратурой РЛС СВЧ трактом, с вращающимся переходом между кронштейном и основанием антенны, стабилизация платформы осуществляется с использованием силы земного притяжения, свойств физического маятника и гироскопа с электроприводом, отличающаяся тем, что из состава стабилизированного антенного поста исключена стабилизированная платформа, имеющая большие массу и габариты и требующая для функционирования гироскопа затрат электроэнергии, а также крупногабаритный радиопрозрачный кожух; полная стабилизация диаграммы направленности антенны без затраты энергии с использованием силы земного притяжения и свойств физического маятника осуществляется путем изменения конструкции антенного поста зеркальной РЛС, а именно кронштейн антенны, установленный поворотно на основании антенного поста, выполнен фигурным в виде вертикальной балки с изгибом в сторону тыльной стороны антенны с укрепленными в верхней части горизонтальными взаимно перпендикулярными поворотными устройствами, ось первого из которых расположена вдоль, а второго - поперек оси диаграммы направленности антенны, причем центр пересечения осей расположен на линии вертикальной оси горизонтального вращения указанного фигурного кронштейна: зеркальный отражатель антенны подвешен своей тыльной стороной в точке выше своего центра тяжести на оси второго поворотного устройства, с обеспечением свободных поворотов зеркального отражателя антенны на указанных поворотах устройствах продольной и в поперечной по отношению к оси ДН (диаграммы направленности) антенны, вертикальных плоскостях под действием собственной тяжести элементов конструкции зеркального отражателя антенны, расположенных ниже точки подвеса, что обеспечивает сохранение неизменным положение отражателя антенны на качке судна и стабилизацию положения ее диаграммы направленности.
Зеркальный отражатель антенны снабжен дополнительным грузом, имеющим возможность перемещаться вдоль оси ДН антенны и стопориться в нужном положении, обеспечивающем перемещение центра тяжести подвешенного отражателя антенны вдоль оси диаграммы направленности антенны и установку оси ДН антенны строго по горизонту.
На поворотных устройствах антенны установлены ограничители углов поворотов по 30-45o в обе стороны с амортизаторами, препятствующими выходу из строя антенны при экстремальных углах крена и дифферента судна.
В поворотных устройствах антенны установлены демпфирующие устройства с регулируемыми характеристиками демпфирования, устанавливаемыми в зависимости от параметров качки судна, на котором устанавливается РЛС, и скорости вращения антенны по азимуту для исключения побочных колебаний антенны.
В поворотных устройствах фигурного кронштейна и зеркального отражателя установлены вращающиеся СВЧ переходы, обеспечивающие трансляцию СВЧ энергии между СВЧ трактом подвешенных частей антенны и СВЧ трактом приемопередающей аппаратуры РЛС.
Для варианта антенны с существующей у прототипа формой диаграммы направленности антенны в вертикальной плоскости размещение существующей зеркальной антенны на стабилизирующем фигурном кронштейне с поворотными устройствами осуществляется без изменения ее характеристик направленности.
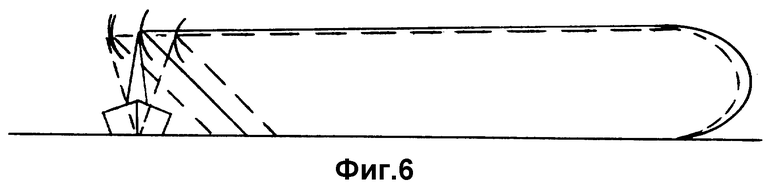
Для варианта антенны с улучшенной формой диаграммы направленности в вертикальной плоскости конструкция зеркального отражателя антенны выполнена так, что диаграмма направленности антенны в вертикальной плоскости имеет косекансную форму с плоской верхней границей, параллельной поверхности моря, и веерной в нижней части с наклоном ближней границы к горизонту на 35-50o, обеспечивая тем самым значительное улучшение условий обнаружения морских целей во всем диапазоне дальностей и экономии излучаемой энергии, бесполезно расходуемой существующими РЛС при облучении верхней полусферы.
Перечень фигур чертежей и иных материалов.
Фиг. 1 - cхема конструкции антенного поста в исходном положении, вид спереди.
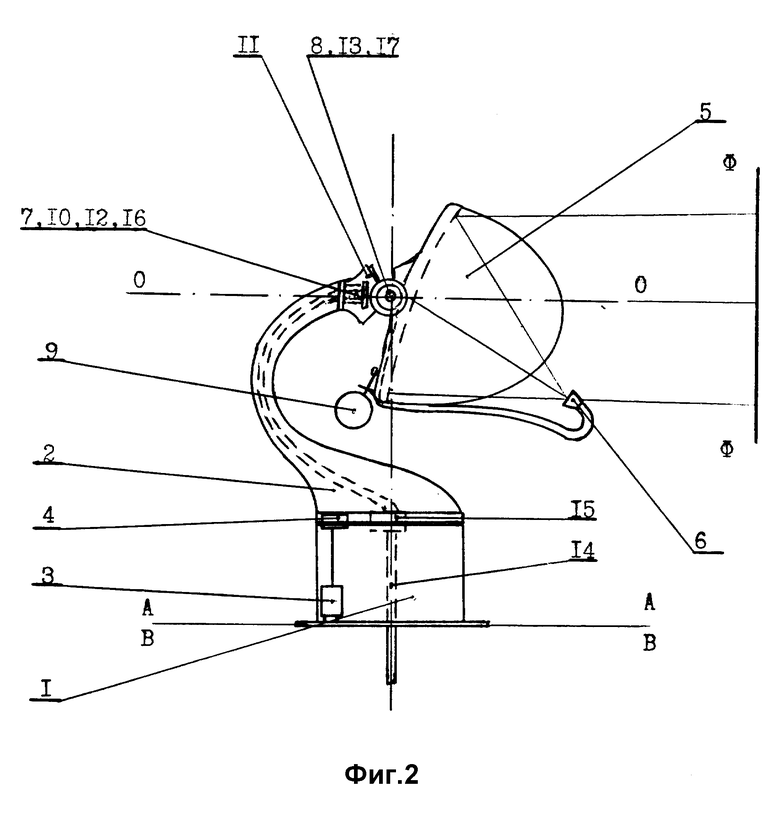
Фиг. 2 - схема конструкции антенного поста (вид сбоку) в исходном положении.
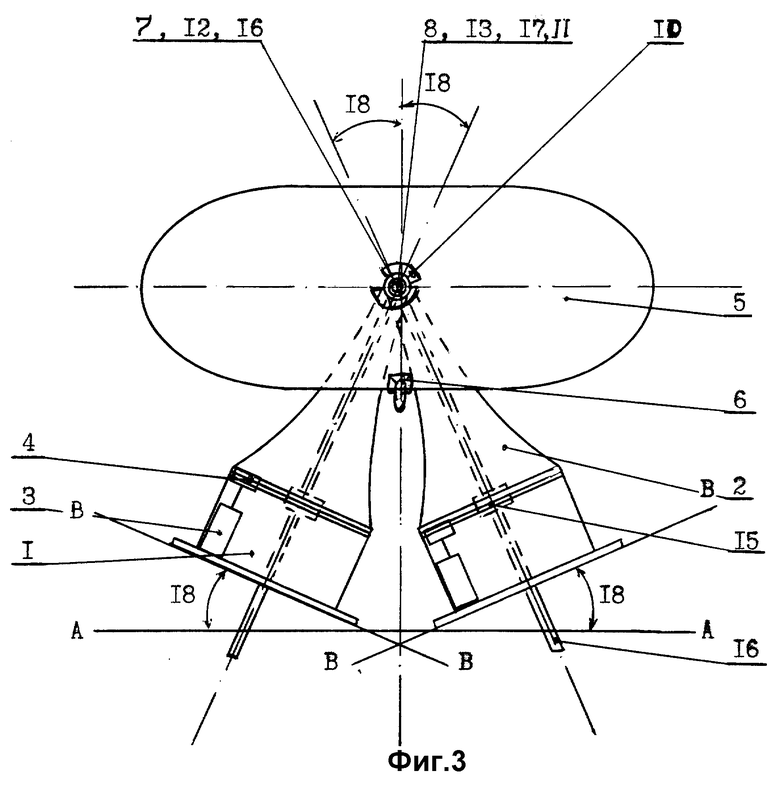
Фиг. 3 - схема конструкции антенного поста (вид спереди) при крене судна в поперечном к оси антенны направлении.
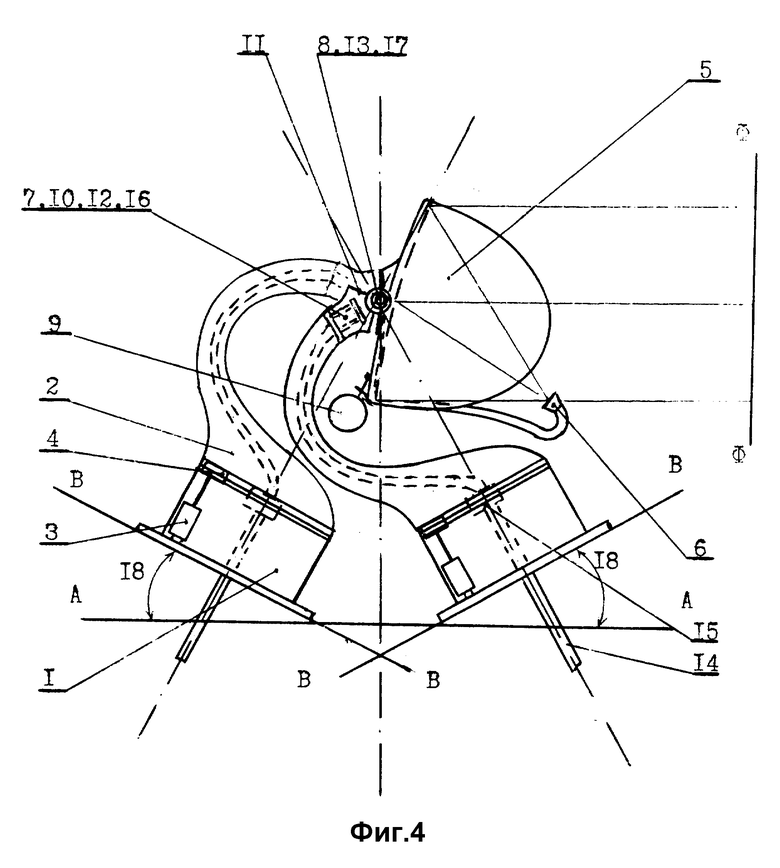
Фиг. 4 - схема конструкции антенного поста (вид сбоку) при крене судна в продольном к оси антенны направлении.
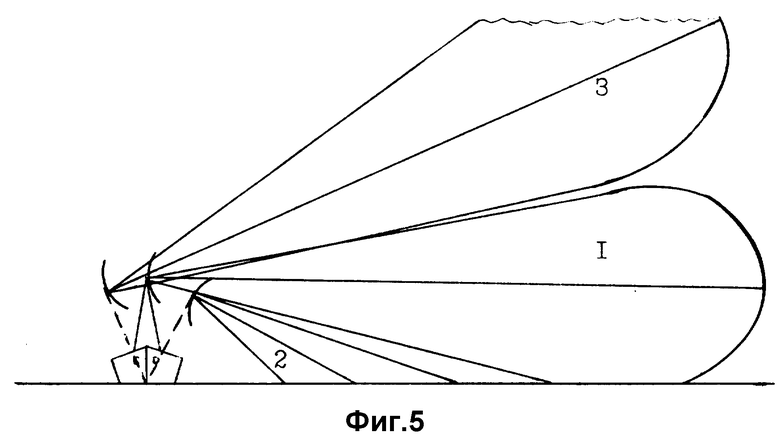
Фиг. 5 - расположение ДН нестабилизированной антенны на качке судна на ровном киле (1) и при крене судна в сторону наблюдения (2) и в сторону, обратную направлению наблюдения (3).
Фиг. 6 - расположение стабилизированной ДН антенны при косекансной форме ДН в вертикальной плоскости во время качки судна.
Перечень условных обозначений:
1 - основание антенны;
2 - фигурный кронштейн;
3 - мотор вращения антенны;
4 - привод вращения;
5 - зеркальный отражатель антенны;
6 - облучатель антенны;
7 - продольное поворотное устройство;
8 - поперечное поворотное устройство;
9 - дополнительный груз зеркального отражателя;
10 - ограничитель углов поворота продольного поворотного устройства с амортизатором;
11 - ограничитель углов поворота поперечного поворотного устройства с амортизатором;
12 - демпфирующее устройство продольного поворотного устройства;
13 - демпфирующее устройство поперечного поворотного устройства;
14 - СВЧ тракт антенны;
15 - вертикальный вращающийся СВЧ переход;
16 - вращающийся СВЧ переход продольного поворотного устройства;
17 - вращающийся СВЧ переход поперечного поворотного устройства;
18 - угол крена судна;
00 - направление оси ДН антенны;
АА - плоскость, параллельная морской поверхности;
ВВ - плоскость, параллельная палубе судна;
ФФ - фронт радиоволн антенны в дальней зоне.
Сведения, подтверждающие возможность осуществления изобретения.
Возможность стабилизации ДН зеркальной антенны основано на использовании сил земного притяжения и законов физического маятника.
Для обеспечения стабилизации луча ДН судовой антенны необходимо обеспечить сохранение положения антенны в пространстве неизменным в пределах характерных для морских судов максимальных углов крена, которые лежат в пределах 30-40o.
Принципиальные схемы конструкции антенного поста судовой РЛС в исходном положении при нахождении судна на ровном киле представлены на фиг. 1 (вид спереди) и на фиг. 2 (вид сбоку).
Антенный пост представляет собой основание 1, устанавливаемое на мачте судна, на котором размещен поворотно фигурный кронштейн 2, имеющий возможность вращаться в горизонтальной плоскости при помощи расположенных в основании антенны мотора 3 с приводом 4.
На фигурном кронштейне 2 подвешен своей верхней частью зеркальный отражатель антенны 5 с облучателем 6, размещенным на кронштейне облучателя.
Подвижная подвеска отражателя антенны 5 выполнена при помощи продольного 7 и поперечного 8 по отношению к оси антенны горизонтальных поворотных устройств. Продольное поворотное устройство 7 установлено непосредственно на верхней точке фигурного кронштейна 2 и обеспечивает сохранение антенной вертикального положения под действием силы земного притяжения и законов физического маятника при кренах судна в поперечном направлении. Поперечное поворотное устройство 8 поворотно соединяет поворотное устройство 7 с зеркальным отражателем антенны 5 и обеспечивает сохранение положения антенны при кренах судна в продольном направлении.
Для обеспечения вертикального положения зеркального отражателя 5 с облучателем 6 на кронштейне облучателя и обеспечения тем самым занятия в исходном положении диаграммой направленности антенны горизонтального положения, отражатель антенны снабжен дополнительным грузом 9. Груз 9 размещен подвижно сзади в нижней части отражателя и имеет возможность в ограниченных пределах перемещаться вдоль оси антенны и фиксироваться в нужном положении, когда ДН антенны горизонтальна.
Поворотное устройство 8 установлено строго на вертикальной оси вращения антенна в горизонтальной плоскости для исключения изменения вертикального положения антенны при горизонтальном вращении под действием центробежных сил.
Для исключения поломок поворотных устройств и антенны при аварийных кренах судна в поворотных устройствах установлены механические ограничители углов поворота с амортизаторами с углами ограничения 30-40o - 10 и 11.
С целью исключения побочных колебаний антенны при резкой качке судна поворотные устройства 7 и 8 снабжены демпфирующими устройствами 12 и 13 соответственно. В качестве демпфирующих устройств могут быть использованы любые воздушные или жидкостные демпфирующие устройства известных типов с регулируемыми в небольших пределах временными характеристиками демпфирования, позволяющими их выбор в зависимости от параметров качки судна, на котором устанавливается РЛС со стабилизированным антенным постом.
Для обеспечения трансляции СВЧ энергии между приемопередающей аппаратурой РЛС и антенной помимо стандартного СВЧ тракта 14 и вертикального вращающегося СВЧ перехода 15 между основанием антенны 1 и вращающимся фигурным кронштейном 2 в состав антенного поста дополнительно введены в продольное и в поперечное поворотные устройства вращающиеся СВЧ переходы продольного поворотного устройства 16 и поперечного поворотного устройства 17.
При вращении антенны в горизонтальной плоскости антенна и ее ось ДН в горизонтальной плоскости будут занимать по отношению к диаметральной плоскости (курсу) судна различные направления.
При направлении ДН антенны вдоль диаметральной плоскости судна назад или вперед величина наклона антенны от килевой качки и боковой наклон антенны от бортовой качки не будут влиять на положение ДН антенны в вертикальной плоскости (см. фиг. 3), так как зеркальный отражатель антенны 5 с облучателем 6 под действием силы тяжести повернется относительно фигурного кронштейна 2 на оси продольного поворотного устройства также на угол крена 18 в обратную сторону и сохранят тем самым первоначальное положение отражателя 5 с облучателем 6. Условия наблюдения целей для РЛС сохранятся неизменными.
При направлении ДН антенны на борт (фиг. 4) и крене судна на борт 18 поворот подвижных частей антенны будет происходить на оси поперечного поворотного устройства, сохраняя неизменным положение антенны в пространстве.
По мере вращения антенны составляющие бортового и килевого крена будут изменяться. Благодаря установленной на фигурном кронштейне системе поворотных устройств зеркальный отражатель антенны 5 с облучателем 6 будет всегда сохранять первоначальное положение, обеспечивая сохранение неизменным направление ДН антенны в вертикальной плоскости.
Изложенное подтверждает возможность технического осуществления предлагаемого устройства.
Внедрение предлагаемого устройства обеспечит получение целого ряда преимуществ.
При использовании предлагаемого антенного поста практически исключаются какие-либо изменения дальности обнаружения целей на качке.
Для подтверждения возможности стабилизации антенны по предложенному способу рассмотрим закономерности движения подвижной части конструкции, представляющей собой физический маятник, на качке судна.
Закономерности качания физического маятника широко используются для стабилизации в пространстве картушки судовых магнитных компасов. Массивный свинцовый поддон корпуса картушки обеспечивает сохранение верхней плоскостью картушки, установленной на карданном подвесе, строго горизонтального положения.
Для своевременной отработки корпусом картушки, являющимся в рассматриваемом случае физическим маятником, углов качки судна период ее собственных колебаний должен быть значительно меньше периода качки судна.
Физическим маятником является абсолютно твердое тело, совершающее под действием силы тяжести колебания вокруг горизонтальной оси, проходящей через его центр тяжести [Справочник по физике. Яворский Б.М., Детлаф А.А. -M.: Наука, 1978 г.].
Период колебаний физического маятника определяется соотношением , (5)
, (5)
где
J - момент инерции тела относительно оси качания;
m - масса физического маятника;
d - длина физического маятника;
g - ускорение силы тяжести.
Если мы рассматриваем качание тела сложной формы, состоящего из n отдельных составляющих, момент инерции такого тела относительно оси качания J определяется как сумма произведений масс всех составляющих частей тела m[i] на квадраты их расстояний от той же оси r[i] . (6)
. (6)
Аналогично для суммарной величины md такого тела справедливо равенство . (7)
. (7)
Используем полученные выражения для определения периода колебаний качающихся деталей предлагаемой конструкции антенного поста судовой РЛС.
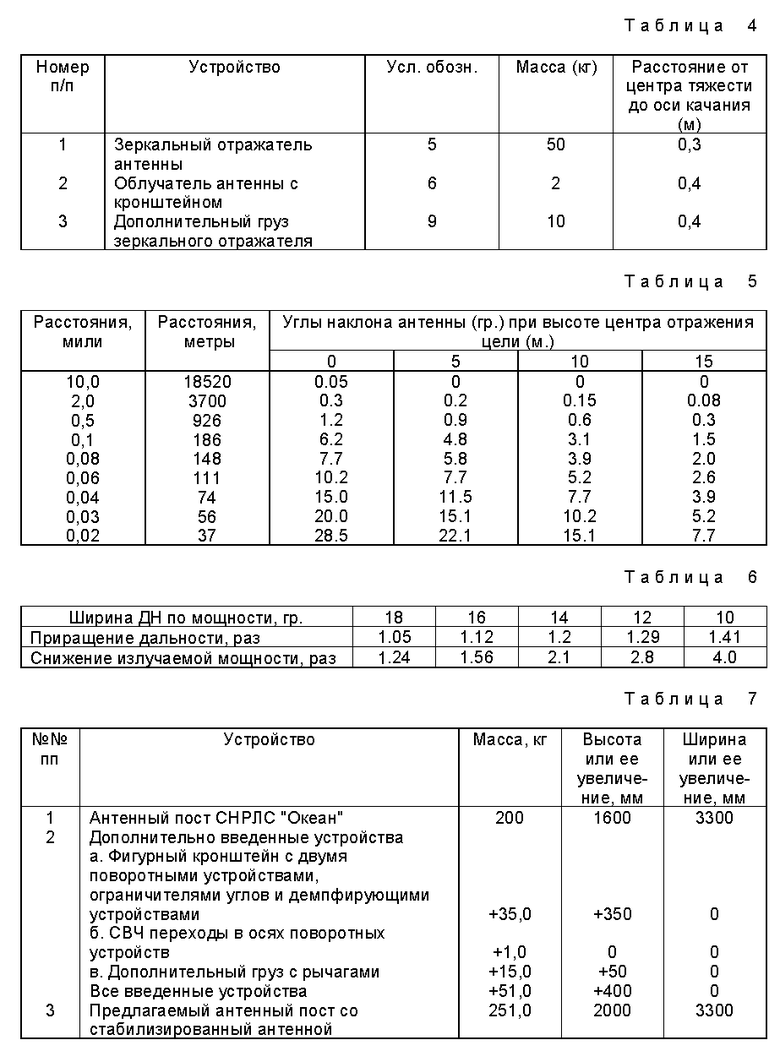
Принятые для расчетов данные приведены в табл. 4.
Результаты расчетов показывают, что период колебаний рассматриваемого физического маятника будет равен 1.14 с. Период бортовой качки морских судов, в зависимости от их размеров и конструкции корпуса, колеблется от 7 до (20+30)с [В.В. Ашин, Проектирование судов.- Л.: Судостроение, 1985 г.]. Это на порядок и больше превышает период колебаний предлагаемой в заявке качающейся части антенны, что исключает возможность возникновения побочных колебаний качающихся частей антенны во время качки судна.
Стабилизация оси ДН антенны судовой РЛС в вертикальной плоскости для улучшения условий наблюдения целей на качке судна открывает возможность оптимизации ширины диаграммы направленности антенны в вертикальной плоскости.
В табл. 5 представлены необходимые углы обзора судовых РЛС по углу места для наблюдения целей с высотами эффективных центров отражения радиоволн 0, 5, 10 и 15 м на дальностях от радиогоризонта до дальности мертвой зоны, составляющей для современных РЛС 30-40 м при установке антенны РЛС на высоте 20 м.
Данные табл. 5 показывают, что при принятых в настоящее время величинах диаграмм направленности антенн в вертикальной плоскости (порядка 20o - по 10o вверх и вниз) нормальные условия обнаружения ближних низких целей зависят от величины и расположения боковых лепестков ДН антенны в вертикальной плоскости и в ряде случаев не обеспечиваются.
На фиг. 5 показаны зоны обзора существующих судовых РЛС в вертикальной плоскости с нестабилизированными антеннами на качке при состоянии судна на ровном киле - положение 1, при крене в сторону обзора - положение 2 и при крене в противоположную сторону - положение 3.
Для предлагаемой стабилизированной антенны на качке судна диаграмма направленности антенны будет сохранять положение 1, обеспечивая стабильные условия обнаружения целей вне зависимости от качки судна.
Как отмечалось выше, предлагаемая стабилизированная антенна обеспечивает возможность использования наиболее рациональной, с точки зрения обнаружения целей на всех дистанциях, формы диаграммы направленности антенны. Одной из таких является косекансная диаграмма направленности, широко используемая в РЛС обнаружения воздушных целей. Для судовых РЛС обнаружения надводных целей косекансная диаграмма направленности, как показано на фиг. 6, обеспечивает оптимальные условия обнаружения надводных целей.
В табл. 6 представлены результаты расчетов количественного повышения дальности обнаружения надводных целей или уменьшения энергетической характеристики РЛС в зависимости от величины диаграммы направленности антенны в вертикальной плоскости по сравнении с РЛС, имеющей ДН в 20o.
Приведем сравнительные характеристики антенны-прототипа в составе стабилизированной платформы по патенту США N 3.893.123 от 1.07.75 с установленным на ней антенным постом СНРЛС "Океан" с предлагаемой в заявке стабилизированной зеркальной антенной СНРЛС также с использованием элементов антенного поста СНРЛС "Океан".
В табл. 7 приведены сравнительные массогабаритные характеристики антенного поста СНРЛС "Океан" (см. табл. 1), дополнительно введенных в состав этого поста устройств для реализации предложенных технических решений и стабилизированной зеркальной антенны по материалам настоящего изобретения с использованием данных табл. 5 и фиг. 1 и 2.
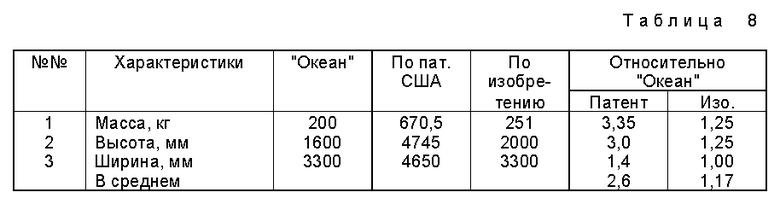
Сравнительные массогабаритные характеристики на основе табл. 3, 5 и 7 сведены в табл. 8.
Изложенное позволяет сделать следующие выводы:
1. В предлагаемом антенном посту обеспечивается стабилизация оси ДН на качке судна без затраты энергии с использованием силы земного притяжения и закономерностей физического маятника.
2. Предлагаемая конструкция стабилизированной антенны СНРЛС технически реализуема и работоспособна. По сравнении с прототипом предлагаемая конструкция имеет меньшую в 2.67 разa массу и в 2.37 разa меньшую высоту. По сравнению с существующим нестабилизированным антенным постом станции "Океан" антенный пост предлагаемой конструкции имеет большую массу и высоту в 1.25 раза, что не может быть существенным препятствием к его практическому использованию, учитывая получаемые при этом значительные преимущества.
3. Стабилизация положения диаграммы направленности антенны улучшает условия и повышает надежность обнаружения морских целей в условиях качки судна, а при больших углах качки исключает возможные пропуски в обнаружении целей.
4. Использование предлагаемого стабилизированного антенного поста обеспечивает возможность уменьшения ширины ДН антенны в вертикальной плоскости и повышения за счет этого энергетической характеристики РЛС или при сохранении неизменной дальности обнаружения целей позволяет уменьшить излучаемую передатчиком РЛС мощность и величину потребляемой от бортсети судна энергии.
5. Одним из рациональных вариантов антенны является использование косекансной диаграммы направленности антенны, в наибольшей степени отвечающей условиям наблюдения надводных целей.
Изобретение относится к области морской радиолокации. Антенна стабилизирована в пространстве с использованием силы земного притяжения и свойств физического маятника, что и является техническим результатом. Стабилизация антенны осуществляется за счет подвески антенны верхней тыльной частью на выполненном фигурным вращающемся кронштейне на взаимно перпендикулярных горизонтальных поворотных устройствах, установленных в верхней части кронштейна. Для обеспечения симметрии подвешенной антенны используется дополнительный груз. Поворотные устройства снабжены вращающимися СВЧ переходами, ограничителями поворотов с амортизаторами и демпфирующими устройствами. 5 з.п. ф-лы, 8 табл., 6 ил.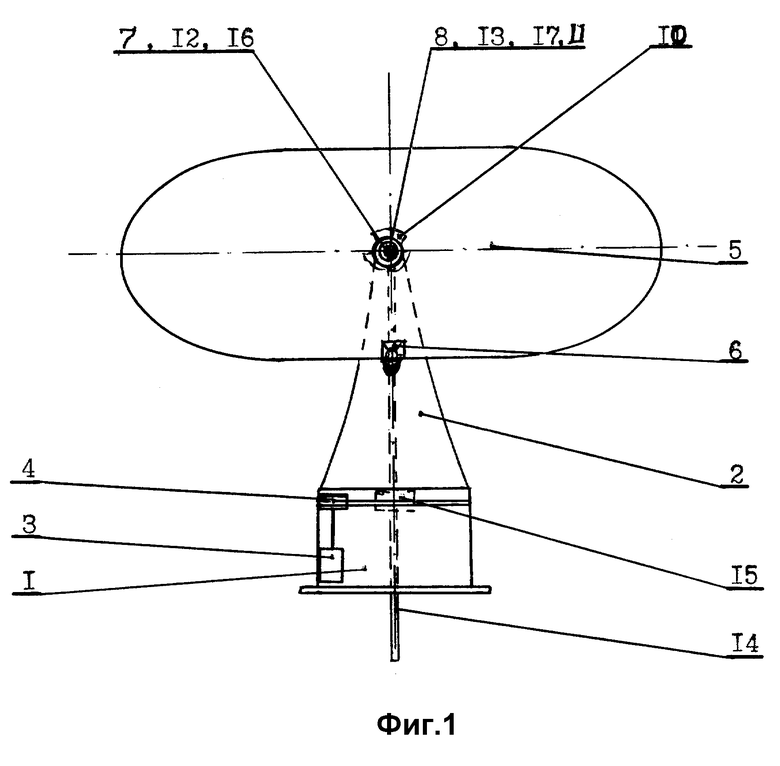
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 3893123 А, 01.07.75 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 4609083 А, 02.09.86 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US 3860931 А, 14.01.75 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Поворотное устройство антенны | 1987 |
|
SU1422270A1 |
