Изобретение относится к области радиоэлектронного оборудования судов и кораблей, в частности к антенным постам судового и корабельного радиоэлектронного оборудования. Описание изобретения будем излагать применительно к антенным постам судовых навигационных радиолокационных станций. В дальнейшем будем употреблять обобщенный термин - судовые навигационные радиолокационные станции (НРЛС).
В настоящее время судовые НРЛС являются одним из важнейших средств обеспечения безопасности судовождения, особенно в ночное время и в условиях плохой видимости. Характерной особенностью функционирования судовых НРЛС является необходимость обеспечения надежного обнаружения надводных и береговых целей в условиях качки.
Обеспечение надежного обнаружения надводных и береговых целей в условиях качки решается в настоящее время несколькими путями, в зависимости от назначения РЛС. Для обеспечения нормального функционирования НРЛС на гражданских судах, согласно требованиям Морского регистра (см. например материалы Международного совещания по радиосредствам для морской навигации, состоявшегося в Лондоне в мае 1924 г., приведенные в Справочнике по радиолокации, редактор М. Сколник, М.: Советское радио, 1978), антенны НРЛС должны иметь диаграмму направленности в вертикальной плоскости не менее 18-20o. Это обеспечивает нормальное функционирование станции при бортовой качке судна ±10o. Как следует из изложенного выше, никаких специальных мер по стабилизации антенн НРЛС не предусмотрено и не требуется.
Для стабилизации антенн специальных РЛС военного назначения используются различные системы принудительной стабилизации антенного поста или луча антенны РЛС. Такие системы весьма сложны и дороги. В связи с этим, для применения на гражданских судах, в том числе в составе НРЛС, такие системы не могут быть использованы.
На основании изложенного, в качестве прототипа антенного поста к предлагаемому в настоящей заявке самостабилизирующемуся антенному посту для судовой радиолокационной станции мы выбираем нестабилизированную антенну существующих судовых НРЛС.
Для сравнительной количественной оценки эффективности функционирования выбранной антенны-прототипа и предлагаемого устройства - самостабилизирующегося устройства для антенных постов и приборов судовой радиоэлектронной аппаратуры, применительно к судовым навигационным РЛС, целесообразно рассмотреть влияние качки судна на условия обнаружения надводных целей. Данный вопрос был достаточно полно рассмотрен А.Н.Тупысевым и изложен в его книге Радиолокационное наблюдение в условиях качки, Военно-Морская ордена Ленина академия. Л., 1965.
В указанной работе показано, что НРЛС с нестабилизированной антенной будет измерять курсовой угол на качке - qн с ошибкой, зависящей от величины бортовой (θ) и килевой (Ψ) качки. В указанной работе показано, что можно определить величину ошибки в измерении курсового угла относительно истинного (для стабилизированной антенны) - qc с использованием приведенного ниже выражения, при измерении углов в радианах.
где qc - истинный курсовой угол цели;
qн - измеряемый на качке курсовой угол цели;
θ- угол бортовой качки;
Ψ- угол килевой качки.
Для частного случая, когда антенна НРЛС стабилизирована только по бортовой качке (θ = 00), выражение 1 принимает вид
qн-qc = 0,25•Ψ2•Sin2qc (2)
На фиг.1 представлены рассчитанные по формулам 1 и 2 графики зависимости ошибки измерения пеленга qн-qc от курсового угла qc при различных углах крена θ и дифферента Ψ. Анализ полученных графиков показывает, что при гарантированных антеннами современных судовых НРЛС предельных рабочих углах крена в 10o и дифферента в 3o ошибки измерения пеленга только от влияния качки составляют 0,3-0,5o. При возрастании углов качки до 20 и 5o соответственно максимальные ошибки измерения пеленга возрастают до 1-1,7o.
На фиг. 1 представлен также график зависимости ошибки измерения пеленга qн-qc от курсового угла qc при обеспечении частичной стабилизации антенны РЛС только по углам бортовой качки (θ = 0o - Const). Ошибки измерения пеленга в этом случае зависят только от угла килевой качки Ψ и не превышают 0,01o.
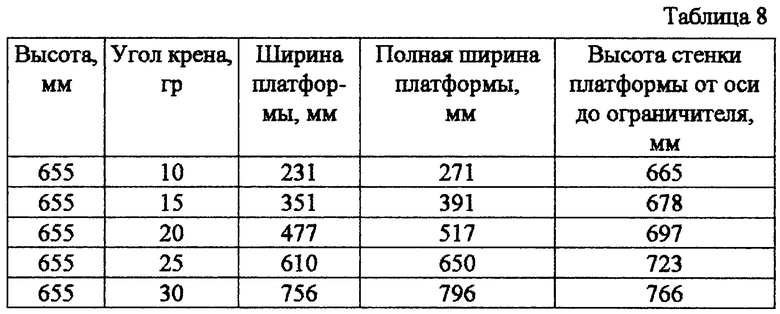
В указанной выше книге Тупысева А.Н. рассмотрен также вопрос о вероятности захвата морской цели радиолокационным лучом при одном цикле обзора. По результатам рассмотрения составлен график зависимости вероятности захвата надводной цели радиолокационным лучом Р(+) от курсового угла цели для двух случаев - для нестабилизированной антенны при углах бортовой качки θ = 10o и килевой качки Ψ = 3o и для полностью стабилизированной антенны, для которой θ = 0°, a Ψ = 0°.
Круговая диаграмма зависимости вероятности захвата лучом НРЛС надводной цели от курсового угла приведена на фиг. 2 (рис.51 на стр. 80 указанной выше книги). Анализ приведенной зависимости показывает, что вероятность захвата надводной цели за один оборот антенны существующих НРЛС (прототипа) обеспечивает вероятность захвата, в зависимости от ее курсового угла, от 0,43 до 0,95, с резким уменьшением вероятности на траверзных курсовых углах.
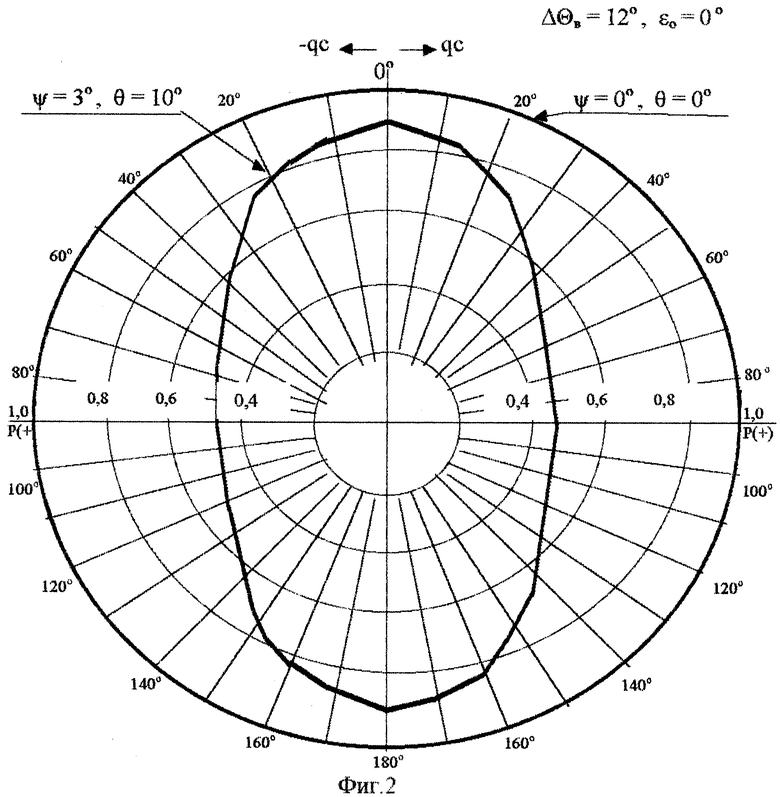
В указанной выше книге А.Н. Тупысева определены зоны обнаружения надводных целей судовой НРЛС для различных условий наблюдения и вероятностей обнаружения при вероятности ложной тревоги F=10-5. При расчетах принято, что угол возвышения оси диаграммы направленности (ДН) антенны над горизонтом равен 0o, а максимальный угол отклонения оси ДН от горизонта на качке Δθв = 12o. Величины дальности обнаружения определены относительно дальности обнаружения цели r=R/R0,5, где R0,5 - дальность обнаружения с вероятностью D=0,5.
На фиг.3 (рис.119 на стр.217 книги А.Н.Тупысева) приведены зоны обнаружения надводной цели судовой НРЛС с нестабилизированной антенной в условиях качки при θ = 10° и Ψ = 3°.
На фиг.4 (рис.101 на стр.193 книги А.Н.Тупысева) приведены зоны обнаружения надводной цели судовой НРЛС при отсутствии качки или с полностью стабилизированной антенной в условиях качки, т. е. при θ = 0° и Ψ = 0°.
Сравнительный анализ приведенных зависимостей показывает, что для существующих нестабилизированных антенн судовых НРЛС условия обнаружения надводных целей значительно ухудшаются, особенно для целей на траверзных курсовых углах от 60 до 120o. Для вероятности обнаружения 0,5 дальность обнаружения составляет 0,9 от дальности на спокойной воде.
Рассмотрим характеристики качки морских судов. Эти вопросы рассмотрены в указанной выше книге А.Н. Тупысева.
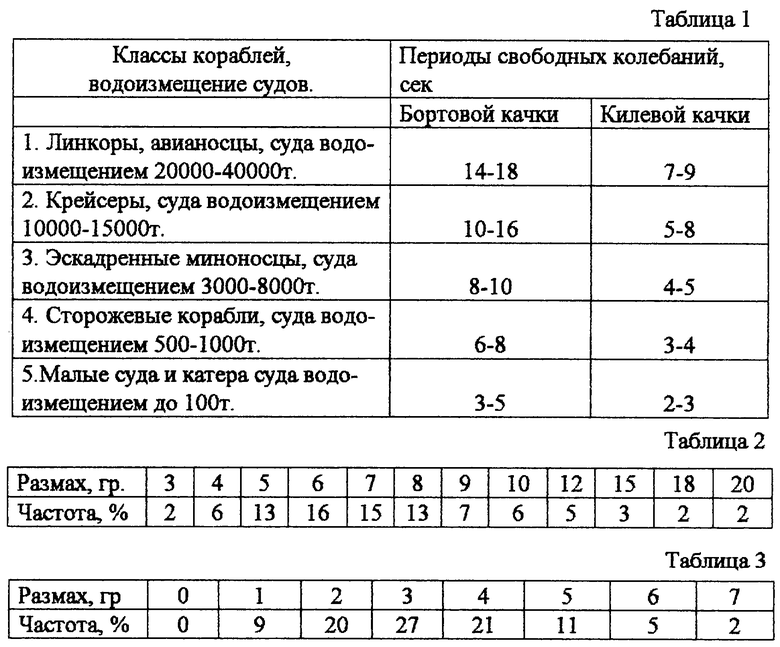
В табл. 1 приведены данные о периодах свободной бортовой и килевой качки кораблей и судов различного водоизмещения, помещенные на стр.32 указанной книги.
Там же на стр.31 приведены статистические данные о повторяемости размахов (двойной амплитуды) бортовой и килевой качки различной амплитуды. Данные построены на основе натурных испытаний кораблей и судов с последующей обработкой и получением статистических характеристик повторяемости различных размахов качки. Полученные результаты приведены в табл. 2 (по бортовой качке) и 3 (по килевой качке).
По результатам рассмотрения условий функционирования антенных систем судовых НРЛС (прототипа), а также других датчиков радиоэлектронной аппаратуры, таких как телевизионной, электрооптической, гирокомпасов и др., можно сделать следующие выводы.
1. Применяемый в современных НРЛС способ обеспечения нормального функционирования станций на качке за счет использования широкой диаграммы направленности (до 18-20o) в вертикальной плоскости, не в полной мере обеспечивает нормальную работу НРЛС. Даже при небольших углах качки возрастают ошибки измерения пеленга, снижается вероятность захвата целей системами автоматической обработки сигналов и дальность обнаружения целей, особенно на траверзных курсовых углах.
2. Основное влияние на ухудшение работы НРЛС на качке оказывает бортовая качка судна.
3. Анализ приведенных данных о вероятных углах качки показывает, что в 90-95% размах бортовой качки укладывается в пределы 20o, а килевой качки - в пределы 7o. Следовательно, для обеспечения стабилизации антенных постов и приборов РЭА, как минимум, достаточно обеспечить стабилизацию по бортовой качке в углах ±10o, а по килевой качке - ±4o.
Определенными достоинствами обладают самостабилизирующиеся платформы, в том числе и для установки антенных постов радиоэлектронной аппаратуры, использующие силу земного притяжения и не требующие для своего функционирования затрат энергии.
Примером такого технического решения является устройство стабилизации, предложенное в патенте США N3860931 от 14.01.75.
Судовая гравитационная стабилизированная антенна по указанному патенту США имеет следующие отличительные признаки. Стабилизированный антенный пост РЛС, состоящий из антенного поста РЛС, установленного на стабилизированной платформе, закрытого вместе с платформой радиопрозрачным кожухом, антенна которого укреплена с помощью кронштейна на тумбе, установленной на основании антенного поста, имеющего мотор и привод вращения. Стабилизация платформы вместе с установленным на ней антенным постом РЛС осуществляется за счет использования силы земного притяжения и свойств физического маятника. В качестве уравновешивающих платформу физических маятников использованы четыре шарообразных груза на консолях, укрепленных равномерно вокруг платформы ниже ее центра качания.
Другим техническим решением рассматриваемого вопроса является комбинированная гироскопическая и использующая свойства физического маятника стабилизированная платформа для антенной системы по патенту США N3893123 от 1.07.75. Отличительные признаки данного устройства можно сформулировать следующим образом. Стабилизированный антенный пост судовой НРЛС, состоящий из антенного поста РЛС, установленного на стабилизированной платформе, закрытого вместе с платформой радиопрозрачным кожухом. Антенный пост укреплен с помощью кронштейна на тумбе, установленной на основании антенного поста. Стабилизация платформы с антенным постом осуществляется с использованием силы земного притяжения, свойств физического маятника и гироскопа с электроприводом.
Примером самостабилизирующегося устройства, выбранного нами в качестве прототипа, является самостабилизирующаяся в пространстве система, предложенная в патенте США N 4609083 от 2.09.86.
Устройство представляет собой устанавливаемую на судне или на другом транспортном средстве самостабилизирующуюся под действием силы земного притяжения платформу. На верхней площадке платформы размещается антенна РЛС или другое устройство, подлежащее стабилизации. В качестве таких устройств в материалах патента указаны антенны слежения за спутниками, микроволновые антенны, антенны РЛС, навигационное оборудование, фотографические и другие оптические приборы.
Предложенное в патенте США N 4609083 от 2.09.86 устройство представляет собой платформу, имеющую снизу противовес с рычагом. Платформа с противовесом подвешена на двух взаимно перпендикулярных горизонтальных осях, встроенных в раму с подшипниками, на станине, устанавливаемой на мачте или на надстройке судна. Платформа под действием расположенного ниже осей подвески противовеса имеет возможность сохранять на качке судна неизменным горизонтальное положение своей верхней площадки. Таким образом, предложенная в патенте США N 4609083 от 2.09.86 самостабилизирующаяся платформа обеспечивает полную стабилизацию установленного на ее верхней площадке антенного поста РЛС или любого другого устройства.
Выполним ориентировочную оценку массогабаритных характеристик стабилизированного антенного поста РЛС массой М, высотой 3Н, с центром тяжести, расположенным на расстоянии Н от основания поста.
Принятые нами для оценочных расчетов величины массогабаритных характеристик стабилизированного антенного поста по патенту США сведены в табл. 4.
В табл. 4 приняты следующие условные обозначения и сокращения: хm и хр - коэффициенты для масштаба массы противовеса и длины его рычага к М и Н соответственно, ЦТ - центр тяжести.
Величины массы противовеса и его центра тяжести (плеча) взаимосвязаны и могут быть определены из условия
xm=1,11/(хр+0,1) (3)
В табл. 5 приведены основные характеристики антенного поста отечественной судовой НРЛС "Печора-2", взятые из справочного руководства Судовые радиолокационные станции и их применение. В.А. Аверьянов, А.М. Байрашевский и др., Л.: Судостроение. 1970г. (стр. 138-139).
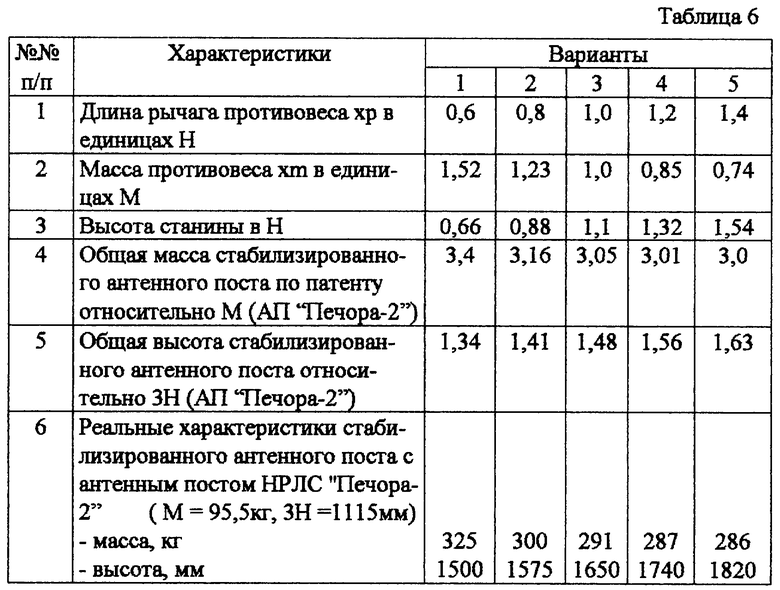
В табл. 6 приведены массогабаритные характеристики предлагаемой в патенте самостабилизирующейся платформы с установленным на ней антенным постом НРЛС на основе данных табл. 1 для различных вариантов соотношений массы и плеча противовеса (хm, хр), а также реальные масса и высота самостабилизирующегося антенного поста при установке на стабилизированную платформу по патенту США антенного поста НРЛС "Печора-2".
Результаты оценочных расчетов показывают, что использование предложенной в патенте США стабилизированной платформы для стабилизации антенны судовой НРЛС приводит к возрастанию массы антенного поста более чем в 3 раза и высоты в 1,3-1,6 раз.
Таким образом, существенным недостатком устройства стабилизации по патенту США N 4609083 от 2.09.86, как и остальных двух рассмотренных устройств, с антенной НРЛС "Печора-2", принимаемого нами в качестве прототипа, является то, что в указанных устройствах стабилизированная платформа размещена выше осей качания самостабилизирующегося устройства. При таком расположении осей масса стабилизируемого устройства (антенного поста или другого устройства) с платформой должна быть скомпенсирована противовесом, располагаемым ниже осей качания платформы, с массой и плечом противовеса, обеспечивающими поддержание платформы со стабилизируемым устройством в верхнем положении. Такое решение вопроса приводит к значительному увеличению массогабаритных характеристик всего устройства.
Сущность изобретения.
Предлагается самостабилизирующееся устройство для антенных постов и приборов судовой радиоэлектронной аппаратуры (РЭА), представляющее собой платформу, на которой установлен антенный пост или прибор РЭА, состоящий из антенного поста РЛС любого назначения, датчика или прибора РЭА, платформа соединена снизу посредством рамы с двумя взаимно перпендикулярными горизонтальными осями с противовесом и рычагом и подвешена осями с помощью встроенных подшипников на станине, устанавливаемой на мачте или на надстройке судна, отличающееся тем, что в состав устройства введены станина, состоящая из основания станины и двух стоек станины с подшипниками и откосом, платформа, снабженная сверху боковыми стенками с подшипниками в их верхних частях, и подвижно соединяющее станину с платформой коромысло с двумя парами полуосей (внешними и внутренними), причем стабилизированная платформа вместе с установленной на ней стабилизируемой аппаратурой (антенным постом или прибором) размещена ниже осей качания и подвешена на двух взаимно перпендикулярных горизонтальных осях коромысла, встроенных в подшипники стоек станины и стенок платформы, располагаемых при установке устройства на судне параллельно и перпендикулярно диаметральной плоскости судна соответственно, вместо противовеса использованы сама платформа со стенками и расположенная ниже центра тяжести часть стабилизируемой аппаратуры (часть антенного поста или прибора), в качестве рычага противовеса использованы стенки платформы, станина, устанавливаемая на мачте или на надстройке судна, представляет собой основание станины в виде плиты, снабженной спереди и сзади стойками станины с подшипниками и откосами - внешними вертикальными ребрами жесткости, передняя и задняя внешние полуоси коромысла встроены в подшипники соответствующих стоек станины с подшипниками и откосом, а внутренние боковые полуоси встроены в подшипники соответствующих стенок платформы с подшипниками, основание станины сверху снабжено трехгранным сверху продольным выступом со скошенными передним и задним краями, в который упирается при максимальных углах крена и дифферента нижняя поверхность платформы, ограничивая углы поворота платформы относительно станины и палубы качающегося судна, необходимый максимальный угол поворота платформы относительно станины устанавливается относительными вертикальными размерами стенок платформы и стоек станины, длиной и шириной платформы, а также высотой выступа станины, благодаря чему обеспечивается, без затраты энергии, под действием силы тяжести расположенных ниже осей подвески платформы со стенками и стабилизируемой аппаратуры, самостабилизация платформы и установленного на ней стабилизируемого устройства по бортовой и килевой качке, а также ограничение углов поворота платформы относительно палубы судна при больших углах крена и дифферента, с целью предотвращения поломки самостабилизирующегося устройства при значительно меньших по сравнению с прототипом массе и габаритах самостабилизирующегося устройства, значительно улучшая условия функционирования судовой радиоэлектронной аппаратуры на качке судна.
Перечень фигур чертежей.
Фиг. 1. График зависимости ошибки измерения курсового угла НРЛС от углов качки судна.
Фиг. 2. Зависимость вероятности захвата лучом НРЛС надводной цели от курсового угла на спокойной воде и на качке.
Фиг.3. Зоны обнаружения надводной цели в условиях качки.
Фиг. 4. Зоны обнаружения надводной цели при отсутствии качки или при полной стабилизации антенны.
Фиг. 5. Чертеж самостабилизирующегося устройства для антенного поста судовой НРЛС при отсутствии крена судна.
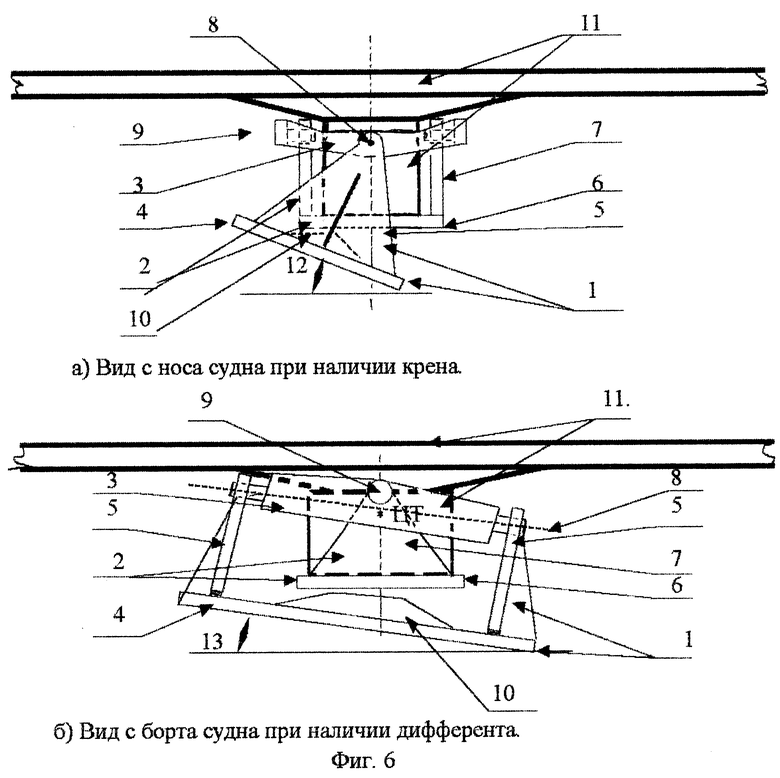
Фиг. 6. Чертеж самостабилизирующегося устройства для антенного поста судовой НРЛС при крене и дифференте судна.
Фиг.7. Чертеж внешнего вида самостабилизирующихся антенных постов судовой НРЛС - прототипа (слева) и предлагаемого устройства (справа).
Фиг. 8. Чертеж самостабилизирующегося устройства для основного прибора гирокомпаса.
Условные обозначения на фиг. 5, 6 и 8.
1. Станина.
2. Платформа со стенками.
3. Коромысло с двумя парами полуосей.
4. Основание станины.
5. Стойка станины с подшипниками и откосом.
6. Платформа.
7. Стенка платформы с подшипниками.
8. Продольная ось качания платформы (при крене судна).
9. Поперечная ось качания платформы (при дифференте судна).
10. Ограничительный выступ.
11. Стабилизируемое устройство.
12. Угол крена судна.
13. Угол дифферента судна.
Чертеж предлагаемого самостабилизирующегося устройства с установленным на нем антенным постом судовой навигационной РЛС представлен на фиг.5.
Устройство состоит из станины 1, подвижной платформы со стенками 2 и коромысла с двумя парами полуосей 3. Полуоси коромысла расположены в горизонтальной плоскости под прямым углом. Станина 1 состоит из основания станины 4, представляющего прямоугольную металлическую плиту с отверстиями по углам для крепления к палубе или к настилу надстройки, мостика. Станина устанавливается на судне так, что более длинная сторона направлена параллельно диаметральной плоскости судна. На носовой и кормовой сторонах основания станины 4 сверху укреплены поперечные стойки станины с подшипниками и откосом 5. Подшипники расположены в верхних частях стоек, а откосы в качестве вертикальных ребер жесткости укреплены по середине наружных сторон стоек.
Между стойками станины с подшипниками и откосом 5 подвижно укреплена качающаяся платформа со стенками 2, состоящая из горизонтальной платформы 6, снабженной направленными вверх боковыми стенками платформы с подшипниками 7.
Качание платформы в двух взаимно перпендикулярных плоскостях, в плоскости бортовой (вокруг продольной оси) и килевой (вокруг поперечной оси) качек, обеспечивается коромыслом с двумя парами полуосей 3. Установленные на внешней стороне коромысла передняя и задняя полуоси укреплены в подшипниках передней и задней стоек станины с подшипниками 5, обеспечивая сохранение горизонтального положения коромысла 3 при бортовой качке. Боковые полуоси коромысла с двумя парами полуосей 3 укреплены в подшипниках стенок платформы с подшипниками 7, обеспечивая сохранение горизонтального положения платформы 7 при килевой качке. На платформу сверху устанавливается стабилизируемое устройство - антенный пост судовой навигационной РЛС в составе антенны и приемопередатчика (см. фиг. 5 и 6) или любой другой прибор, требующий стабилизации, например основной прибор гирокомпаса (см. фиг.8).
В средней части плиты основания станины 4 сверху, между стойками станины с подшипниками и откосом 5 укреплен обрезиненный сверху ограничительный выступ 10. Он обеспечивает ограничение спереди, сзади и с боков углы поворота платформы 6 относительно станины 1 за счет упора соответствующих нижних поверхностей платформы в соответствующую поверхность ограничительного выступа 10.
Основным условием правильного функционирования предлагаемого самостабилизирующегося устройства является выполнение требования по выбору размеров устройства, обеспечивающему расположение центра тяжести стабилизируемого устройства 11, совместно с платформой со стенками 2, ниже осей качания платформы 6 (см. фиг.5б).
Функционирует самостабилизирующееся устройство следующим образом (см. фиг.5 и 6). В исходном положении (см. фиг.5), при отсутствии качки, платформа со стенками 2 с установленным на ней стабилизируемым устройством (например, антенным постом РЛС) 11, подвижно подвешенная на двух взаимно перпендикулярных осях коромысла 3 на станине 1, под действием силы земного притяжения масс платформы со стенками 2 и стабилизируемого устройства 11, центр тяжести которых находится в точке ЦТ (см. фиг.5б) и расположен ниже оси качания платформы 2-8 и оси качания коромысла с двумя парами полуосей 3-9, висит на полуосях коромысла 3.
При наличии крена судна на угол 12 (см. фиг.6а), дифферента судна на угол 13 (см. фиг.6б) или одновременно крена и дифферента на указанные углы станина 1 накренится вместе с судном.
Подвижная часть устройства, платформа со стенками 2 и установленное в ней стабилизируемое устройство 11, под действием силы земного притяжения сохранят свое положение в пространстве, обеспечивая стабилизацию стабилизируемого устройства 11, например антенного поста и диаграммы направленности антенны НРЛС в вертикальной плоскости. В крайнем положении по углу качки 12 или по углу дифферента 13 для данного устройства платформа своей нижней частью ляжет на ограничительный выступ 10. Дальнейшее относительное перемещение платформы 2 и станины 1 прекратится, предотвращая поломку устройства при еще больших углах крена. Прекратится и стабилизация стабилизируемого устройства, например антенного поста НРЛС. Функционирование НРЛС при больших, чем предусмотрено конструкцией устройства, углах крена будет обеспечиваться, как и у современных НРЛС, за счет широкой ДН в вертикальной плоскости.
Для своевременной отработки антенным постом, являющимся в рассматриваемом случае физическим маятником, углов качки судна, период его собственных колебаний должен быть значительно меньше периода качки судна.
Физическим маятником является абсолютно твердое тело, совершающее под действием силы тяжести колебания вокруг горизонтальной оси, проходящей через его центр тяжести (cм. Справочник по физике. Яворский Б.М., Детлаф А.А. М.: Наука, 1978 г.).
Период колебаний физического маятника Т определяется соотношением
где J = m•d2 - момент инерции тела относительно оси качания;
m - масса физического маятника;
d - длина физического маятника;
g - ускорение силы тяжести.
Если мы рассматриваем качание тела сложной формы, состоящего из n отдельных составляющих, момент инерции такого тела относительно оси качания J определяется как сумма произведений масс всех составляющих частей тела m[i] на квадраты их расстояний от той же оси r[i].
Аналогично для суммарной величины md такого тела справедливо равенство
Используем полученные выражения для определения периода колебаний качающихся деталей предлагаемой конструкции антенного поста судовой НРЛС. Принятые для расчетов данные, при изготовлении предлагаемого устройства из алюминия, приведены в табл. 7.
Результаты расчетов, с использованием приведенных выражений и данных табл. 7, показывают, что период колебаний рассматриваемого физического маятника - универсального самостабилизирующегося устройства будет равен 1,4 с. Период бортовой качки морских судов, в зависимости от их размеров и конструкции корпуса, колеблется от 3 до 20+30 с (см. табл. 1, а также В.В. Ашин Проектирование судов. Л. : Судостроение, 1985 г.). Это в два и более раз превышает период колебаний предлагаемой в заявке качающейся части универсального самостабилизирующегося устройства, что исключает возможность возникновения побочных колебаний предлагаемого устройства с антенной НРЛС во время качки судна.
На фиг.8 приведен чертеж самостабилизирующегося устройства для основного устройства гирокомпаса. Конструкция устройство аналогична устройству для антенного поста. Отличие состоит только в изменении геометрических размеров составных частей устройства, применительно к размерам и массе основного прибора гирокомпаса.
Полная стабилизация основного прибора гирокомпаса обеспечивает устранение ошибок гирокомпаса, обусловленных качкой судна. Эти ошибки для отечественных гирокомпасов "Курс-3" и "Гиря" составляют ±0,5o, гирокомпаса "Амур" - ±1,5o (см. Курс кораблевождения. Том V. Книга 1. Гироскопы и другие гироскопические приборы. Н.И. Сигачев, Е.П. Глебов, А.А. Якушенков. Л. Управление гидрографической службы ВМФ. 1961). Следовательно, введение стабилизации по качке повышает точность приборов на указанную величину.
В зависимости от необходимых максимальных углов крена θм, при которых должна быть обеспечена самостабилизация с использованием предлагаемого устройства, должна быть выбрана необходимая ширина платформы - а, обеспечивающая ограничение ее угла поворота в крайних точках поворота при выбранном максимальном угле крена (дифферента) и высоте стенки платформы L. Указанные величины связаны соотношением (для углов крена)
a = 2L•Tan(θм). (7)
Полная ширина платформы (см. 6 на фиг.5а и 6а) должна быть несколько больше для обеспечения упора в ограничительный выступ станины устройства. Примем величину такой прибавки в 20 мм с каждой стороны. С учетом необходимой ширины платформы требуется определить также для каждого максимального угла крена расстояние (высоту) от оси качания платформы до вершины ограничителя Н. Эта величина может быть определена с использованием выражения
Необходимые значения указанных величин для устройства, в зависимости от заданных максимальных углов крена, приведены в табл. 8.
Аналогичные расчеты могут быть выполнены для расширения углов стабилизации и по килевой качке.
Данные табл. 8 показывают, что предлагаемое самостабилизирующееся устройство способно обеспечить стабилизацию в значительно больших пределах углов бортовой и килевой качки, чем получено при анализе качки судов (см. табл. 2 и 3). Необходимые углы стабилизации определяются выбором высоты стенок платформы с подшипниками 7, стоек станины с подшипниками и откосами 5, а также величины горизонтальных размеров платформы 6.
Результаты оценочных расчетов для приведенных нами примеров показывают, что полученные величины вполне приемлемы для практического использования на судах.
Таким образом, предлагаемое самостабилизирующееся устройство для антенных постов и приборов судовой радиоэлектронной аппаратуры (РЭА) обеспечивает следующие преимущества.
1. Самостабилизацию по углам крена и дифферента судна антенного поста или прибора судовой радиоэлектронной аппаратуры в пределах заданных углов крена и дифферента.
2. Функционирование антенного поста или прибора судовой радиоэлектронной аппаратуры и при больших, чем обеспечено при самостабилизации углах крена. При этом качество функционирования будет соответствовать качеству, аналогичному существующим антенным постам или приборам РЭА, со смещением в сторону углов крена и дифферента на величину углов самостабилизации, обеспечиваемых предлагаемым устройством.
3. Предотвращение поломок устройства при больших углах крена.
4. Значительное повышение качества функционирования антенных постов и приборов РЭА. Это особенно важно для аварийно-спасательных судов, функционирование которых происходит, в основном, в условиях плохой погоды, при наличии малой видимости и большого волнения, а также для кораблей ВМФ, призванных действовать в любую погоду.
5. Возможность уменьшения ширины диаграммы направленности антенны HРЛС и повышения энергетического потенциала станции.
Дополнительным преимуществом предлагаемого устройства является то, что оно может рассматриваться не как составная часть антенного поста или прибора РЭА, а как самостоятельный прибор стабилизации, не входящий в комплект поставки антенного поста или прибора радиоэлектронной аппаратуры.
В этом случае покупатель - судовладелец, при наличии необходимости улучшения качества функционирования любого прибора РЭА, может приобрести отдельно необходимое устройство самостабилизации за отдельную плату.
В заключение необходимо отметить, что предлагаемое самостабилизирующееся устройство для антенных постов и приборов судовой радиоэлектронной аппаратуры технически реализуемо, работоспособно и имеет значительные преимущества перед прототипом.







Изобретение относится к области радиоэлектронного оборудования, в частности к антенным постам и приборам судовой радиоэлектронной аппаратуры (РЭА), требующей для своего нормального функционирования стабилизации на качке. Техническим результатом является самостабилизация антенного поста или прибора судовой радиоэлектронной аппаратуры при бортовой и килевой качке под действием силы земного притяжения, а также предотвращение поломки при больших углах качки, улучшение условий функционирования. В состав предлагаемого самостабилизирующегося устройства введены основание станины и две стойки станины с подшипниками и откосом, платформа, снабженная сверху боковыми стенками с подшипниками, и подвижно соединяющее их коромысло с двумя парами полуосей, вмонтированных в подшипники стоек станины и стенок платформы. Центр тяжести стабилизированной платформы вместе с установленной на ней стабилизируемой аппаратурой размещен ниже осей качания. Платформа подвешена на двух взаимно перпендикулярных горизонтальных осях коромысла, располагаемых при установке устройства на судне параллельно и перпендикулярно диаметральной плоскости судна. В качестве противовеса использованы сама платформа со стенками и расположенная ниже оси качания стабилизируемой аппаратуры. В качестве рычага противовеса использованы стенки платформы. Основание станины сверху снабжено продольным трехгранным сверху выступом со скошенными передним и задним краями, в который упирается при максимальных углах крена и дифферента нижняя поверхность платформы, ограничивая углы поворота платформы относительно станины и палубы качающегося судна. 8 табл., 8 ил.
Самостабилизирующееся устройство для антенных постов и приборов судовой радиоэлектронной аппаратуры (РЭА), представляющее собой платформу, на которой установлен антенный пост или прибор судовой РЭА, платформа подвешена осями с помощью встроенных подшипников на станине, установленной на мачте или на надстройке судна, и противовес с рычагом, отличающееся тем, что станина состоит из основания станины и двух стоек станины с подшипниками и внешними вертикальными ребрами жесткости, рычаги противовеса выполнены в виде боковых стенок платформы с подшипниками в их верхних частях, введено подвижно соединяющее станину с платформой коромысло с двумя парами внешних и внутренних полуосей, располагаемых параллельно и перпендикулярно диаметральной плоскости судна соответственно, внешние полуоси коромысла встроены в подшипники соответствующих стоек станины, а внутренние полуоси встроены в подшипники боковых стенок платформы, причем центр тяжести платформы вместе с установленным на ней антенным постом или прибором судовой РЭА размещен ниже осей качания и платформа вместе с частью антенного поста или прибора судовой РЭА, расположенной ниже оси качания, выполняет функции противовеса, основание станины выполнено в виде плиты и сверху снабжено трехгранным сверху продольным выступом со скошенными передним и задним краями, в который упирается при максимальных углах крена и дифферента нижняя поверхность платформы, ограничивая углы поворота платформы относительно станины и палубы судна, необходимый максимальный угол поворота платформы относительно станины устанавливается относительными вертикальными размерами боковых стенок платформы и стоек станины, длиной и шириной платформы, а также высотой выступа станины.
| US 4609083 А, 09.02.1986 | |||
| US 3789414 A, 29.01.1974 | |||
| СТЕНД ДЛЯ СТАТИЧЕСКИХ И КВАЗИСТАТИЧЕСКИХ ИСПЫТАНИЙ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2243531C2 |
| Измеритель фазовых сдвигов четырехполюсников | 1979 |
|
SU890264A1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ПАТИССОНЫ КОНСЕРВИРОВАННЫЕ" | 2008 |
|
RU2367271C1 |
| US 3860931 A, 14.01.1975 | |||
| US 4442435 A, 10.04.1984 | |||
| SU 1688326 A1, 30.10.1991. | |||

