Изобретение относится к области морской радиолокационной техники, в частности к зеркальным антенным устройства судовых радиолокационных станций.
Судовые РЛС предназначены для обеспечения безопасности судовождения в любое время года, суток, в условиях темного времени суток, в тумане и в других сложных условиях мореплавания. На судах морского флота в указанных условиях, а также в условиях хорошей видимости при плавании вблизи берегов, судовые РЛС работают практически непрерывно, обеспечивая отображение на экране станции внешней надводной обстановки.
Характеристики судовых РЛС в значительной степени определяются конструкцией и тактико-техническими данными их антенных устройств.
К основным характеристикам антенных устройств относятся:
диаграммы направленности антенны в горизонтальной и вертикальной плоскостях;
коэффициент усиления антенны;
уровень боковых лепестков;
частота вращения антенны.
Диаграмма направленности антенны РЛС в горизонтальной плоскости характеризует точность определения направления на обнаруженную цель. Для СНРЛС характерными величинами диаграммы направленности по половинной мощности являются 0,8 + 2,2 гр.
Диаграмма направленности антенны в вертикальной плоскости определяет возможность обнаружения надводных целей в условиях качки судна. Характерными величинами для современных станций являются диаграммы направленности величиной 20 + 30 гр., обеспечивающие нормальную работоспособность станций при углах крена до 10 + 15 гр.
Коэффициент усиления антенны определяет эффективность судовых РЛС по обнаружению различных целей.
Уровень боковых лепестков характеризует судовые РЛС с точки зрения возможности получения на экране индикатора станции ложных целей. Уровень боковых лепестков у антенн современных судовых РЛС ниже уровня основной диаграммы на 20 + 30 дБ.
Частота вращения антенны измеряется числом оборотов в минуту и для современных станций равна 14 + 30 об/мин.
Широкое применение в СНРЛС находят в настоящее время антенные посты с использованием зеркальных и волноводно-щелевых антенн.
В табл. 1 приведены основные характеристики антенного поста с зеркальной антенной отечественной СНРЛС "Океан", взятые из справочного руководства "Судовые радиолокационные станции и их применение". В.А. Аверьянов, А.М. Байрашевский и др. Л. Судостроение. 1970 г. (стр. 24 - 34).
Приведенные в таблице антенный пост, как и антенные посты практически всех существующих СНРЛС, обладают одним существенным недостатком, заключающимся в отсутствии стабилизации диаграммы направленности антенны в вертикальной плоскости.
Для количественной оценки величины потерь в обнаружении целей рассмотрим условия функционирования СНРЛС на с удах при наличии качки.
Для существующих СНРЛС с нестабилизированным антенным постом условия обнаружения надводных целей будут зависеть от углов качки судна и формы ДН антенны в вертикальной плоскости. Известно [К.В. Голев. Расчет дальности действия радиолокационных станций. Москва. 1962 г.], что дальность действия РЛС в освещенной зоне - D - можно определить из выражения
где Cm - энергетическая характеристика СНРЛС в максимуме ДН антенны СНРЛС;
S - эффективная площадь рассеяния цели;
& - отношение энергии принимаемого сигнала к энергии шумов;
F[fг, fв] - характеристика направленности антенны РЛС по напряженности поля;
fг, fв - углы смещения ДН антенны от оси в горизонтальной и вертикальной плоскости соответственно;
V - множитель ослабления радиоволн в приводном слое.
На расстояниях, меньших 30% дальности радиогоризонта, когда кривизной земной поверхности можно пренебречь, с учетом малых величин разности фаз прямого и отраженного от поверхности моря сигналов в районе цели, получим
где h[1] , h[2] - высоты антенны СНРЛС и эффективного центра отражения цели;
L - длина волны.
Анализ приведенных выражений показывает, что изменение дальности действия СНРЛС, при прочих равных условиях, прямо пропорционально изменению величины диаграммы направленности антенны СНРЛС по напряженности поля, а изменение дальности действия из-за изменения множителя ослабления за счет колебаний величин высот антенны и цели, а также дальности из-за качки судна и цели при волнении моря незначительны.
Для получения количественной оценки изменения дальности обнаружения надводных целей СНРЛС на качке зададимся диаграммой направленности антенны по напряженности в виде [Справочник по радиолокации. Под ред. М. Сколника. М. Сов. радио. 1976 г.]
где Gm - максимальный коэффициент усиления антенны по мощности;
КС - коэффициент сужения ДН по отношению к ДН полуволнового вибратора.
Для расчетов относительного изменения дальности действия СНРЛС на качке в направлении бортовых курсовых углов используем выражение
где Dm - максимальная дальность обнаружения цели при отсутствии качки;
n - номер вычисления значения D/Dm;
nm - общее число суммируемых результатов вычислений;
КС = 60/Q[0.5в], где: Q[0.5в] - ширина ДН антенны по мощности в вертикальной плоскости.
Результаты выполненных на ПЭВМ расчетов средних за период качки, равные величине относительной дальности (в числителе) и величин относительной дальности при максимальных углах крена (в знаменателе) для различных значений максимальных углов крена судна и величин диаграмм направленности антенн в вертикальной плоскости, представлены в табл. 2. Расчеты проводились при nm = 50.
Анализ результатов расчетов показывает, что во время качки судна СНРЛС с нестабилизированным антенным постом будет иметь значительно меньшую дальность обнаружения надводных целей, а при углах качки, близких к максимальным, вообще будут наблюдаться пропуски в обнаружении целей.
Известно несколько способов стабилизации диаграммы направленности антенны РЛС. В частности, из технической литературы (Самойлов Л.К., Электронное управление характеристиками направленности антенн. Ленинград. Судостроение. 1987, стр. 8, 10 (табл. 1.1), 20 (последний абзац), 21 (последний абзац и рис. 1.10) известен способ стабилизации характеристики направленности антенны РЛС в пространстве, в частном случае применения, когда носителем антенны является подверженное бортовой, килевой качке и рысканию по курсу судно, согласно которому устройство формирования управляющих воздействий (гироазимутгоризонт) вырабатывает сигналы управления, поступающие на блок электронного формирования характеристик направленности и корректирует их, обеспечивая стабильное положение в пространстве (для типа антенн с возможностью электронного управления положением оси диаграммы направленности).
Для антенн, в которых возможность электронного управления положением оси диаграммы направленности отсутствует, сигналы управления от гироазимутгоризонта поступают на механические устройства, обеспечивающие сохранение неизменным положение антенного поста или антенны РЛС относительно морской поверхности.
Использование электронного или электромеханического принципа стабилизации антенны СНРЛС с использованием управляющих воздействий от специального датчика (гироазимутгоризонта) для СНРЛС неприемлемо из-за неоправданно высокой сложности аппаратуры и стоимости такого способа стабилизации, особенно за счет необходимости установки на судне специального датчика (гироазимутгоризонта).
Значительным преимуществом обладают стабилизированные антенные посты, основанные на использовании силы земного притяжения. Примером такого антенного поста является устройство стабилизации, предложенное в патенте США N 4.609.083 от 2.09.86.
Устройство представляет собой устанавливаемую на судне или на другом транспортном средстве самостабилизирующуюся под действием силы земного притяжения платформу, на верхней площадке которой размещается устройство, подлежащее стабилизации. В качестве таких устройство в материалах патента указаны антенны слежения за спутниками, микроволновые антенны, антенны РЛС, навигационное оборудование, фотографические и другие оптические приборы.
Предложенное в патенте устройство представляет собой платформу, имеющую снизу противовес с рычагом. Платформа с противовесом подвешена на двух взаимно перпендикулярных горизонтальных осях, встроенных в раму с подшипниками, на станине, устанавливаемой на мачте или на надстройке судна. Таким образом платформа, под действием расположенного ниже осей подвески противовеса, имеет возможность сохранять на качке судна неизменным горизонтальное положение своей верхней площадки.
Таким образом, предложенная в патенте США 4.609.082 от 2.09.86 самостабилизирующаяся платформа обеспечивает полную стабилизацию установленного на ее верхней площадке антенного поста РЛС или любого другого устройства.
Выполним ориентировочную оценку массогабаритных характеристик стабилизированного антенного поста РЛС массой M, высотой 3H, с центром тяжести, расположенным на расстоянии H от основания поста.
Принятые нами для оценочных расчетов величины массогабаритных характеристик стабилизированного антенного поста по патенту США сведены в табл. 3.
В таблице приняты следующие условные обозначения и сокращения: xm и xp - коэффициенты для масштаба массы противовеса и длины его рычага к M и H соответственно, ЦТ - центр тяжести.
Величина массы противовеса и его центра тяжести (плеча) взаимосвязаны и могут быть определены из условия
xm = 1.11/(xp + 0.1)
В табл. 4 приведены массогабаритные характеристики рассматриваемой самостабилизирующейся платформы с установленным на ней антенным постом РЛС на основе данных таблицы 3 для различных вариантов соотношений массы и плеча противовеса (xm, xp), а также реальные масса и высота антенного поста при установке на стабилизированную платформу антенного поста СНРЛС "Океан".
Результаты оценочных расчетов показывают, что использование предложенной в патенте США стабилизированной платформы для стабилизации антенны судовой РЛС приводит к возрастанию массы антенного поста более чем в 3 раза и высоты в 1.3 - 1.6 раз.
Другим существенным недостатком использования предложенной в патенте США платформы на судах является существенное ограничение углов наклона платформы при перемещении противовеса в сторону станины. Судя по приведенному в материалах патента чертежу (фиг. 2), угол наклона противовеса в сторону станины не может превышать 5-6 градусов, при возможных кренах судна в 10 и более градусов.
Чтобы уменьшить углы наклона платформы в указанном направлении необходимо устанавливать платформу так, чтобы наклоны платформы в указанном направлении совпадали с диаметральной плоскостью судна нос-корма, в которой качка-дифферент судна значительно меньше, чем бортовая качка.
Однако и в этом случае для предотвращения поломки платформы при больших наклонах судна необходимо несколько увеличить вынос подвижной части на оси станины, что приведет к необходимости повышения прочности оси и станины, т. е. к еще большему увеличению массогабаритных характеристик устройства.
Таким образом, существенными недостатками устройств антенны-прототипа по патенту США N 4.609.083 от 2.09.86, являются:
увеличенные массогабаритные характеристики:
проблематичность использования устройства на качающемся судне из-за ограниченных углов наклона платформы в ряде направлений и отсутствия ограничителей углов наклона для предотвращения поломки платформы при экстремальных углах качки.
Сущность изобретения заключается в том, что самостабилизирующийся антенный пост судовой РЛС, включающий антенный пост с параболическим отражателем, установленный на стабилизированной платформе, состоящий из параболического отражателя и расположенного в фокусе отражателя облучателя антенны на кронштейне, установленных на станине и основании антенны, основание антенны укреплено на стабилизированной платформе, обеспечивающей стабилизацию антенны РЛС и ее диаграммы направленности в вертикальной плоскости, а также сохранение поляризации излучаемых и принимаемых радиоволн, причем стабилизация платформы осуществляется без затраты энергии за счет силы земного притяжения и свойств физического маятника, отличающийся тем, что из состава антенного поста исключают стабилизированную платформу, выполняют поворачивающимися на горизонтальной оси в вертикальной плоскости кронштейн с облучателем или зеркальный отражатель антенны, облучатель антенны выполняют поворачивающимся вокруг своей оси, в состав антенного поста включают два физических маятника и две системы рычагов, передающие взаимное перемещение одного маятника и качающегося судна на подвижные кронштейн облучателя или отражатель антенны, другого маятника и качающегося судна на поворотный облучатель антенны, обеспечивая стабилизацию диаграммы направленности антенны в вертикальной плоскости и сохранение поляризации радиоволн без затраты энергии за счет силы земного притяжения и свойств физического маятника.
В варианте с управлением диаграммой направленности за счет перемещения кронштейна с облучателем антенны, отличающийся тем, что кронштейн облучателя подвижно укреплен в центре отражателя и снабжен вращающимся СВЧ переходом, обеспечивающим качание кронштейна с облучателем в вертикальной плоскости, а система рычагов представляет собой расположенный вертикально шарнирно соединенный четырехугольник с равными сторонами-рычагами, передний вертикальный рычаг которого является одновременно отвесом маятника, с укрепленным на продолжении рычага вниз грузом маятника, приводящим в движение во время качки судна систему рычагов и кронштейн облучателя, шарнирно соединенный с передним вертикальным рычагом; верхний горизонтальный рычаг соединен с кронштейном и является продолжением кронштейна облучателя за плоскость отражателя антенны через центр отражателя, а нижний горизонтальный и задний вертикальный рычаги соединены подвижно с муфтой, скользящей по наклонному штырю, укрепленному неподвижно под углом 45 градусов в верхней части с задней стороны отражателя антенны в точке качания кронштейна облучателя и соединения переднего вертикального и верхнего горизонтального рычагов, а снизу - к корпусу антенного поста, при этом, в процессе качки судна, маятник через систему рычагов поворачивает кронштейн с облучателем на угол, равный двойному углу крена судна в сторону крена, обеспечивая отклонение диаграммы направленности антенны на угол крена в противоположную сторону и сохраняя тем самым первоначальное направление, т.е. стабилизацию в вертикальной плоскости диаграммы направленности антенны.
В варианте с управлением диаграммой направленности антенны за счет перемещения отражателя антенны, отличающийся тем, что зеркальный отражатель антенны укреплен подвижно на горизонтальной оси в точке своего центра, а обеспечивающая синхронное с качкой перемещение отражателя антенны система рычагов с маятником представляет собой расположенный вертикально шарнирно соединенный четырехугольник с равными сторонами-рычагами, передний вертикальный рычаг которого является одновременно отвесом маятника с укрепленным на продолжении рычага вниз грузом маятника, приводящим при качке в движение систему рычагов и зеркальный отражатель; соединенный подвижно с передним вертикальным рычагом верхний горизонтальный рычаг неподвижно укреплен с основанием антенны и кронштейном облучателя, одновременно являясь продолжением кронштейна облучателя за переднюю плоскость отражателя, а нижний горизонтальный и задний вертикальный рычаги соединены подвижно с муфтой, скользящей по наклонному штырю, жестко соединенному с подвижным зеркальным отражателем антенны и подвижно укрепленному в верхней части в точке соединения переднего вертикального и верхнего горизонтального рычагов; при этом, в процессе качки судна, обеспечивается изменение под действием маятника через систему рычагов углового положения зеркального отражателя на угол, равный половине угла крена судна, в сторону, противоположную крену, обеспечивая отклонение оси диаграммы направленности антенны на угол крена, в противоположную крену сторону, и сохраняя тем самым первоначальное направление, т. е. стабилизацию в вертикальной плоскости, диаграммы направленности антенны.
Облучатель антенны снабжен СВЧ вращающимся переходом, обеспечивающим вращение облучателя вокруг своей оси симметрии, и снабжен маятником, под действием которого облучатель сохраняет постоянным положение в пространстве относительно плоскости Земли.
В состав антенного поста включен механизм изменения начального положения кронштейна облучателя, обеспечивающий наклон оси диаграммы направленности антенны в вертикальной плоскости вниз с целью улучшения условий наблюдаемости надводных целей в ближней зоне.
На фиг. 1 изображена принципиальная схема конструкции самостабилизирующегося антенного поста судовой РЛС в исходном положении (вид сбоку). Первый вариант.
На фиг. 2 - принципиальная схема конструкции самостабилизирующегося антенного поста судовой РЛС в исходном положении (вид сбоку). Второй вариант.
На фиг. 3 - принципиальная схема конструкции самостабилизирующегося антенного поста судовой РЛС при крене судна (вид сбоку). Первый вариант.
На фиг. 4 - принципиальная схема конструкции самостабилизирующегося антенного поста судовой РЛС при крене судна (вид сбоку). Второй вариант.
На фиг. 5 - принципиальная схема конструкции самостабилизирующегося антенного поста судовой РЛС в исходном положении (вид спереди).
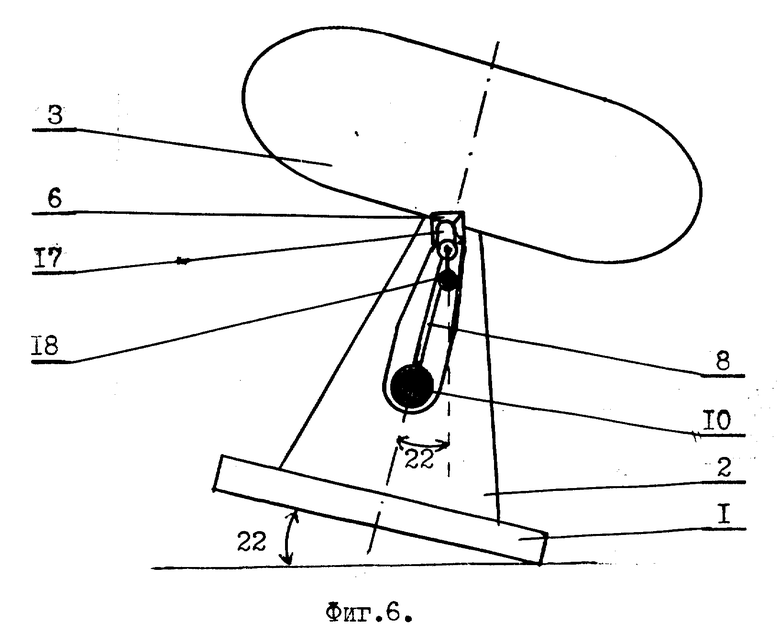
На фиг. 6 - принципиальная схема конструкции самостабилизирующегося антенного поста судовой РЛС при крене судна (вид спереди).
Возможность стабилизации ДН зеркальной антенны основана на использовании известного способа сканирования ДН путем смещения облучателя зеркальной антенны из фокуса зеркального отражателя.
Такой способ изменения положения оси ДН широко используется в радиолокации. На этом принципе основан, например, обзор пространства по высоте в высотомерах, в которых сканирование луча антенны по высоте осуществляется путем качания зеркального отражателя антенны в вертикальной плоскости относительно неподвижного облучателя антенны.
На этом же принципе основан обзор участка поверхности моря или суши в РЛС управления стрельбой за счет быстрого перемещения луча антенны в заданном секторе обзора по азимуту и воспроизведения на экране индикатора типа В просматриваемого участка поверхности.
О возможных максимальных углах сканирования луча зеркальных антенн указывается в литературе (см. Справочник по радиолокации. Под редакцией М. Сколник. Сов. радио. М. 1973 г., т. 2, стр. 109 - 117). Отмечается, что антенна со сферическим зеркалом обеспечивает сканирование луча ДН антенны без значительных искажений в пределах угла 140 градусов. Антенна с отражателем в виде параболического тора обеспечивает качание луча ДН антенны в угле до 120 градусов.
В отечественной литературе (см. например, В.М. Гинсбург, И.Н. Белова. Расчет параболических антенн. Сов. радио. 1959 г.) изложена методика расчета ДН зеркальных антенн как при расположении облучателя в фокусе отражателя, так и при выносе облучателя с качанием луча ДН антенны в секторе до 10 и более градусов. Здесь же отмечается, что при отклонении луча антенны на углы больше 10 гр. будут наблюдаться искажения формы ДН антенны. Для устранения этого приведены результаты расчетов ДН с корректурой ее формы при отклонении луча антенны на большие углы качания.
Для обеспечения стабилизации луча ДН судовой антенны необходимо качание луча в пределах, характерных для морских судов максимальных углов крена, которые лежат в пределах 30 - 40 градусов.
Из изложенного следует, что практическое использование зеркальных антенн для стабилизации ДН антенны судовых РЛС на качке судна путем отклонения луча ДН антенны за счет перемещения облучателя, широко используемого в радиолокации, вполне осуществимо.
При этом необходимо учесть, что нет необходимости предъявлять жесткие требования к сохранению неизменной формы ДН антенны при качании луча в вертикальной плоскости, т.к. функции по измерению пеленга на цель несет ДН антенны в горизонтальной плоскости, искажения которой при качании ДН в вертикальной плоскости незначительны.
Принципиальная схема конструкции самостабилизирующегося антенного поста судовой РЛС в исходном положении - при нахождении судно на ровном киле, для первого варианта представлена на фиг. 1.
При первом варианте конструкции антенный пост состоит из станины 1 и укрепленных на ней двух боковых стоек 2, в верхней части которых укреплен зеркальный отражатель антенны 3.
В геометрическом центре отражателя, в точке 4, шарнирно укреплен на горизонтальной оси, лежащей в плоскости отражателя, кронштейн облучателя 5 с облучателем 6. Жестко с кронштейном облучателя 5, в качестве его продолжения за плоскость зеркального отражателя 3, укреплен рычаг кронштейна 7.
В центре параболического отражателя, в точке 4, на оси кронштейна подвижно укреплена система рычагов, представляющая собой расположенный вертикально четырехугольник с шарнирно соединенными равными по длине сторонами - рычагами и диагонально расположенным штырем. Передний вертикальный рычаг системы 8, соединенный шарнирно в верхней части с осью кронштейна и верхним горизонтальным рычагом 9, одновременно является отвесом маятника системы. На продолжении рычага 8 вниз укреплен груз маятника 10.
Нижний горизонтальный рычаг 11 и задний вертикальный рычаг 12 соединены в точке своего соединения подвижно с муфтой 13, скользящей по диагонально расположенному наклонному штырю 14, неподвижно укрепленному в верхней части с задней стороны отражателя антенны 3 в центре отражателя, в точке 4, а в нижней части укрепленному к станине антенного поста штангой 15.
Верхний горизонтальный рычаг 9 соединен подвижно с рычагом кронштейна 7 при помощи дистанционно управляемого механизма наклона кронштейна облучателя 16, жестко соединенного с кронштейном 5 облучателя 6.
Для обеспечения трансляции СВЧ энергии между приемо-передатчиком РЛС и качающимся кронштейном облучателя 5 с облучателем 6 соосно с осью качания кронштейна облучателя установлен СВЧ вращающийся переход.
С целью сохранения на качке неизменной поляризации излучаемых и принимаемых радиоволн при наклонах антенны в плоскости отражателя 3, перпендикулярной оси ее диаграммы направленности, облучатель антенны 6 снабжен СВЧ вращающимся переходом 17, обеспечивающим повороты облучателя вокруг своей оси симметрии, и снабжен маятником облучателя 18, под действием которого облучатель сохраняет постоянным положение в пространстве относительно плоскости Земли.
В исходном положении и установке оси ДН в вертикальной плоскости горизонтально излучаемые облучателем 6 радиоволн, отразившись от зеркального отражателя 3, распространяются параллельно поверхности Земли, образуя фронт радиоволн 19.
В случае использовании антенны с наклоном ДН антенны вниз кронштейн облучателя 5 и облучатель 6 занимают под действием механизма 16 в исходном положении позицию 20 с фронтом радиоволн в дальней зоне 21.
Принципиальная схема конструкции самостабилизирующегося антенного поста судовой РЛС в исходном положении для второго варианта с качающимся отражателем антенны представлена на фиг. 2 (вид сбоку).
Для второго варианта конструкции антенный пост состоит, так же как и для первого варианта, из станины 1 с двумя боковыми стойками 2. В отличие от первого варианта параболический отражатель 3 укреплен подвижно к стойкам 2 своим центром 4 на горизонтальной оси, расположенной в плоскости отражателя.
Кронштейн же облучателя 5 с облучателем 6 соединены со стойками 2.
Жестко с кронштейном облучателя 5, в качестве его продолжения за плоскость отражателя 3, укреплен рычаг кронштейна 7.
В центре зеркального отражателя 3 на его оси подвижно укреплена система рычагов, аналогичная системе рычагов первого варианта в составе переднего вертикального рычага 8, верхнего горизонтального рычага 9, груза маятника 10, нижнего горизонтального рычага 11, заднего вертикального рычага 12, муфты 13 и штыря 14.
В отличие от конструкции первого варианта, во втором варианте наклонный диагональный штырь 14 жестко соединен с зеркальным отражателем 3 и имеет возможность качаться вместе с отражателем антенны 3 в вертикальной плоскости вокруг горизонтальной оси зеркального отражателя 3 под действием маятника и системы рычагов.
Верхний горизонтальный рычаг 9 жестко соединен с рычагом кронштейна 7.
Кронштейн облучателя 5 соединен со стойками антенного поста при помощи штанги 15 и дистанционно управляемого механизма наклона кронштейна облучателя 16.
Для обеспечения трансляции СВЧ энергии между приемо-передатчиком РЛС и перемещающимся при наклоне под действием механизма наклона 16 кронштейном облучателя 5 и облучателем 6, кронштейн облучателя 5 снабжен отрезком гибкого волновода или СВЧ вращающимся переходом.
С целью сохранения на качке неизменной поляризации излучаемых и принимаемых радиоволн при наклонах антенны в плоскости отражателя антенны 3, перпендикулярной оси ее ДН, облучатель антенны 6 снабжен СВЧ вращающимся переходом 17, обеспечивающим повороты облучателя вокруг своей оси симметрии, и снабжен маятником облучателя, под действием которого облучатель сохраняет постоянным положение в пространстве относительно плоскости Земли.
В исходном положении и установке оси ДН в вертикальной плоскости горизонтально излучаемые облучателем 6 радиоволны, отразившись от зеркального отражателя 3, распространяются параллельно земной поверхности, образуя фронт радиоволн 19.
В случае использования антенны с наклоном оси ДН антенны вниз, кронштейн 5 и облучатель 6 занимает, под действием механизма 16, в исходном положении позицию 20, образуя в дальней зоне фронт волны 21.
Во время качки судна предлагаемый антенный пост функционирует следующим образом. Рассмотрим функционирование конструкции по первому варианту (фиг. 3).
Рассмотрим случаи, когда крен судна и наклон антенны происходят в плоскости ДН антенны с сторону наблюдаемой цели на угол 22 (фиг. 3).
При наклоне судна и антенного поста на угол 22 на этот же угол наклоняется станина 1, стойки 2, зеркальный отражатель 3, наклонный штырь 14 и штанга 15. Маятник, состоящий из рычага 8 и груза 10, сохранит вертикальное положение рычага - отвеса 8, вследствие чего изменится угол между рычагом 8 и штырем 14 на величину угла крена 22. Система рычагов 8, 9, 11 и 12 с муфтой 13, благодаря скольжению муфты 13 по штырю 14, обеспечит изменение формы системы рычагов. При перемещении муфты 13 по штырю 14 два треугольника, составленные штырем 14 и рычагами 8, 11 и 9, 12 будут всегда равны. Равными всегда будут и углы между наклонной штангой 14 и рычагом 8, наклонной штангой 14 и рычагом 9. Вследствие этого рычаг 9 при наклоне антенного поста на угол 22 изменит свое угловое положение на угол 23, равный двум углам крена - 22. На величину двойного угла крена 23 в сторону крена изменит также свое положение кронштейн облучателя 5 с облучателем 6.
Следовательно, относительно жестко соединенного с судном зеркального отражателя 3, изменившего свое положение в пространстве на угол крена 22, кронштейн облучателя 5 с облучателем 6 наклонится в сторону крена на двойной угол крена - угол 23, обеспечивая отклонение оси ДН антенны в сторону, противоположную крену на угол, равный разности углов наклона кронштейна 6 и отражателя 3, т. е. на угол крена - 22 в противоположную сторону, сохраняя тем самым первоначальное горизонтальное положение оси ДН антенны.
Таким образом предлагаемая конструкция антенны обеспечивает стабилизацию ДН антенны в вертикальной плоскости на качке.
Аналогичным образом работает система рычагов и при наклоне судна и антенного поста в противоположную сторону. В этом случае геометрические соотношения между элементами системы рычагов останутся теми же. При наклоне судна и антенного поста на угол 22 благодаря системе рычагов, приводимой в движение маятником (отвес-рычаг 8 и груз 10), кронштейн облучателя 5 с облучателем 6 переместится в сторону, противоположную крену на угол, равный двойному углу крена, обеспечивая отклонение оси ДН зеркальной антенны вниз на угол крена 22, сохраняя тем самым первоначальное положение ДН антенны в вертикальной плоскости.
Если в исходном положении диаграмма направленности антенны наклонена вниз при помощи механизма 16 (положение фронта 21 на фиг. 1), на качке судна предлагаемая система стабилизации будет обеспечивать сохранение заданного угла наклона неизменным.
Для второго варианта конструкции антенного поста, принципиальная схема которого представлена на фиг. 2, во время качки судна характерно следующее взаимодействие элементов конструкции (см. фиг. 4).
При наклоне судна на угол 22, когда антенна РЛС направлена в сторону, противоположную углу качки, вместе с судном на этот же угол наклонится также станина 1, стойки 2, кронштейн облучателя 5 с облучателем 6, штанга 15 и механизм 16, а также связанные с кронштейном рычаг кронштейна 7 и верхний горизонтальный рычаг 9.
Маятник, состоящий из переднего вертикального рычага - отвеса маятника 8 и груза 10, под действием силы тяжести сохранит прежнее вертикальное положение, вследствие чего угол между отвесом маятника 8 и верхним горизонтальным рычагом 9 изменится на угол крена 22.
Вследствие равенства сторон системы рычагов 8, 9, 11 и 12 наклонный штырь 14, являющийся диагональю четырехугольника системы рычагов, разделит угол между рычагами 8 и 9 пополам и изменит свое угловое положение в пространстве вместе с жестко соединенным с ним зеркальным отражателем антенны 3 на угол 24, равный половине угла крена 22.
Разность углов наклона судна, антенного поста и кронштейна с облучателем, с одной стороны, и зеркального отражателя 3, с другой, составит также половину угла 22 - угол 24.
За счет смещения облучателя антенны на угол 24 диаграмма направленности антенны сместится в противоположную сторону на двойной угол - угол 22, равный углу крена, сохранив тем самым первоначальное положение ДН антенны, т.е. обеспечив стабилизацию ДН антенны в вертикальной плоскости.
При наклоне на ровном киле ДН антенны путем перемещения с помощью механизма 16 и штанги 15 облучателя антенны в позицию 20 и формирования за счет этого наклонного фронта волны 21 во время качки судна это наклонное положение ДН сохранится неизменным.
Предлагаемый антенный пост РЛС обеспечивает также стабилизацию на качке направления поляризации излучаемых и принимаемых радиоволн за счет введения в состав поста СВЧ вращающегося перехода 17 и маятника облучателя 18 (см. фигуры 1 - 6). В исходном положении, когда судно находится на ровном киле, маятник облучателя 18, жестко соединенный с облучателем, обеспечивает занятие облучателем исходного положения для выбранной поляризации излучаемых и принимаемых радиоволн (см. фиг. 5).
При крене судна и наклоне вместе с ним антенны в плоскости отражателя на угол 22 (см. фиг. 6) маятник облучателя сохранит свое положение в пространстве, обеспечивая сохранение пространственного положения жестко соединенного с ним облучателя антенны и сохраняя тем самым установленную для антенны поляризацию радиоволн.
При вращении антенны в горизонтальной плоскости антенна и ее ось ДН в горизонтальной плоскости будут занимать по отношению к диаметральной плоскости (курсу) судна различные направления.
При направлении ДН антенны вдоль диаметральной плоскости судна назад или вперед величина наклона антенны от килевой качки и боковой наклон антенны от бортовой качки не будут влиять на положение ДН антенны в вертикальной плоскости. Условия наблюдения целей для РЛС сохраняется неизменными.
По мере поворота антенны в сторону борта (курсового угла 90 гр.) составляющая крена будет возрастать. По мере возрастания крена антенного поста подвижная система антенного поста будет постоянно сохранять первоначальное положение физического маятника в вертикальной плоскости, обеспечивая сохранение заданного положения оси ДН антенны в вертикальной плоскости.
Предлагаемая конструкция антенного поста, в отличие от существующих конструкций антенн, позволяет изменять положение оси ДН антенны в вертикальной плоскости вниз от горизонтального положения на угол до 10+20 гр.
Это обеспечивает возможность повышения эффективности наблюдения небольших надводных целей в ближней зоне за счет их облучения максимумом ДН антенны в вертикальной плоскости.
При крене судна наклоненная таким образом в исходном положении антенна будет сохранять заданный угол наклона оси ДН к горизонту так же, как для случая горизонтального положения оси ДН.
Изложенное подтверждает возможность технического осуществления предлагаемого устройства.
Внедрение предлагаемого устройства обеспечит получение целого ряда преимуществ.
При использовании предлагаемого антенного поста практически исключаются какие-либо изменения дальности обнаружения целей на качке.
Для современных крупных морских судов высоты установки антенны РЛС составляют 15+20 м. На этих же высотах располагаются и центры отражения радиолволн для морских судов водоизмещением 5000 т и более.
Следовательно, для обнаружения указанных целей на дальностях от границы мертвой зоны станции до радиогоризонта и за радиогоризонтом ось ДН антенны в вертикальной плоскости должна быть направлена горизонтально. Для наблюдения малоразмерных и низкорасположенных целей на поверхности моря, особенно в ближней зоне, необходимо или иметь достаточно широкую ДН в вертикальной плоскости или наклонить вниз ось ДН.
Используя известное выражение для определения дальности прямой видимости цели, при высоте эффективного центра отражения - h[2]м, станцией с антенной, размещенной на высоте h[1]м - D,
получим для высоты цели 20 м дальность радиогоризонта 18.4 км или около 10 миль.
В табл. 5 представлены необходимые углы наклона оси ДН антенны РЛС для обнаружения целей с высотами эффективных центров отражения 0, 5, 10 и 15 метров на расстояниях от радиогоризонта для минимальной дальности обнаружения (20+30) м.
Данные таблицы показывают, что при принятых в настоящее время величинах диаграмм направленности нормальные условия обнаружения ближних невысоких целей зависят от величины и расположения боковых лепестков ДН антенны в вертикальной плоскости и в ряде случаев не обеспечиваются.
Для повышения эффективности обнаружения в ближней зоне небольших целей в предлагаемом антенном посту предусмотрена возможность наклона оси ДН плавно на угол до 10+20 гр. Это обеспечивает возможность определения и использования для наблюдения ближней надводной обстановки наиболее оптимального угла наклона оси ДН антенны с учетом расположения и величин ее нижних боковых лепестков, выбранной шкалы дальности и используемой на этой шкале излучаемой мощности.
Для подтверждения возможности стабилизации антенны по предложенному способу рассмотрим закономерности движения подвижной части конструкции, представляющей собой физический маятник, на качке судна.
Закономерности качания физического маятника широко используются для стабилизации в пространстве картушки судовых магнитных компасов. Массивный свинцовый поддон корпуса картушки обеспечивает сохранение верхней плоскостью картушки, установленной на карданном подвесе, строго горизонтального положения.
Для своевременной отработки корпусом картушки, являющимся в рассматриваемом случае физическим маятником, углов качки судна период ее собственных колебаний должен быть значительно меньше периода качки судна.
Физическим маятником является абсолютно твердое тело, совершающее под действием силы тяжести колебания вокруг горизонтальной оси, проходящей через его центр тяжести [Справочник по физике. Яворский Б.М., Детлаф А.А. Наука. М. 1978 г].
Период колебаний физического маятника T определяется соотношением
где J - момент инерции тела относительно оси качания;
m - масса физического маятника;
d - длина физического маятника;
g - ускорение силы тяжести.
Если мы рассматриваем качание тела сложной формы, состоящего из n отдельных составляющих, момент инерции такого тела относительно оси качания - J определяется как сумма произведений масс всех составляющих частей тела m[i] на квадраты их расстояний от той же оси r[i]
Аналогично для суммарной величины md такого тела справедливо равенство
Используем полученные выражения для определения периода колебаний качающихся деталей предлагаемой конструкции антенного поста судовой РЛС для первого и второго вариантов.
Принятые для расчетов данные приведены в табл. 6.
Результаты расчетов показывают, что период колебаний рассматриваемых физических маятников будет равен 1.2 сек. и 1.1 с. Период бортовой качки морских судов, в зависимости от их размеров и конструкции корпуса, колеблется от 7 до (20+30) сек. [В.В. Ашин Проектирование судов. Л. "Судостроение", 1985 г. ]. Это в семь и более раз превышает период колебаний предлагаемой в заявке качающейся части обоих вариантов антенны, что исключает возможность возникновения побочных колебаний антенны во время качки судна.
Необходимо отметить, что каждый из предлагаемых антенных устройств для обеспечения стабилизации ДН в вертикальной плоскости имеет свои достоинства и недостатки.
Сравнение основных характеристик вариантов с учетом примерных данных, приведенных в табл. 6, сведены в табл. 7.
Данные табл. 7 показывают, что по радиотехническим характеристикам второй вариант конструкции имеет ряд преимуществ перед первым. Однако по массогабаритным характеристикам первый вариант имеет значительные преимущества.
Несколько улучшить конструкцию по второму варианту можно за счет использования облегченной конструкции зеркального отражателя антенны (пластмассового с металлическим напылением, решетчатого из легкого металла и др. ), а также, для снижения центра тяжести и массы маятника, использования зеркального отражателя полного профиля в обе стороны от центра формы отражателя и центра качания (см. пунктирный профиль на фиг. 5).
Стабилизация оси ДН антенны судовой РЛС в вертикальной плоскости и обеспечение наклона ДН для улучшения условий наблюдения целей в ближней зоне открывают возможность оптимизации начального положения и формы диаграммы направленности антенны в вертикальной плоскости.
В табл. 8 представлены результаты расчетов количественного повышения дальности обнаружения надводных целей или уменьшения энергетической характеристики РЛС в зависимости от величины диаграммы направленности антенны в вертикальной плоскости по сравнению с РЛС, имеющей ДН в 20 гр.
Сравнительные массогабаритные характеристики различных зеркальных антенн на основе приведенных в табл. 1, 4 и 6 данных сведены в табл. 9.
Изложенное позволяет сделать следующие выводы:
1. Предлагаемый самостабилизирующийся антенный пост обеспечивает стабилизацию оси ДН антенны в вертикальной плоскости и сохранение поляризации излучаемых и принимаемых радиоволн без затраты энергии, с использованием силы притяжения Земли и закономерностей физического маятника.
По сравнению с прототипом предлагаемый антенный пост обладает значительно меньшими массогабаритными характеристиками, что обеспечивает простоту его внедрения на судах.
2. Предлагаемая конструкция стабилизированной антенны РЛС технически реализуема и работоспособна.
3. Стабилизация положения диаграммы направленности антенны в вертикальной плоскости и направления поляризации радиоволн улучшает условия и повышает надежность обнаружения морских целей в условиях качки судна, а при больших углах качки исключает возможные пропуски в обнаружении целей.
4. Наличие возможности в предлагаемой антенне изменения угла наклона ДН антенны обеспечивает повышение надежности обнаружения малоразмерных целей в ближней зоне.
5. Использование предлагаемого стабилизированного антенного поста обеспечивает возможность уменьшения ширины ДН антенны в вертикальной плоскости и повышения за счет этого энергетической характеристики РЛС или, при сохранении неизменной дальности обнаружения целей, позволяет уменьшить излучаемую передатчиком СНРЛС мощность и величину потребляемой от бортсети судна энергии.
6. Уменьшение ширины диаграммы направленности антенны СНРЛС в вертикальной плоскости, а также возможное снижение излучаемой станцией мощности обеспечит уменьшение уровней СВЧ энергии на палубе и надстройках судна и повышение экологической чистоты СНРЛС.












Изобретение относится к морской радиолокации. Техническим результатом является обеспечение стабилизации без затрат энергии за счет свойств физического маятника. Сущность изобретения состоит в том, что вводят поворотные на горизонтальной оси кронштейн с облучателем или зеркальный отражатель антенны и связанный с ними системой рычагов физический маятник, обеспечивающий за счет взаимного перемещения в вертикальной плоскости зеркального отражателя и облучателя сохранение положения диаграммы направленности в вертикальной плоскости. Облучатель антенны выполнен поворотным в горизонтальной плоскости вокруг своей оси, снабжен СВЧ поворотным устройством и приводится во вращение связанным с облучателем физическим маятником, обеспечивающим сохранение облучателем неизменных его положения в пространстве и постоянство поляризации радиоволн. В состав антенного поста введен механизм наклона стабилизированной диаграммы направленности антенны, обеспечивающий улучшение условий наблюдения морских целей в ближней зоне. 4 з.п.ф-лы, 6 ил., 9 табл.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 4609083 A, 02.09.86 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 3860931 A, 14.01.75 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 3893123 A, 01.07.75 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Поворотное устройство антенны | 1987 |
|
SU1422270A1 |

