Изобретение относится к области электрических измерений и может быть использовано для повышения точности измерительных преобразователей физических величин.
Известен способ коррекции систематической погрешности измерительного преобразователя, основанный на определении разности выходных сигналов двух дифференциально включенных каналов измерительного преобразователя путем подачи этих сигналов на входы вычитающего устройства (см. кн.: Измерение электрических и неэлектрических величин: Учебн. пособие для вузов / Н.Н. Евтихиев, Я. А. Купершмидт и др.; Под общ. ред. Н. Н. Евтихиева. -М.: Энергоатомиздат, 1989, с. 120-123). На вход одного канала воздействует измеряемая физическая величина, а на вход другого - физическая величина той же природы, но имеющая постоянное значение, в частности, равное нулю. Второй канал служит для компенсации погрешностей, вызванных изменением условий работы прибора. Этот способ обеспечивает компенсацию аддитивной составляющей погрешности измерительного преобразователя (т.е. составляющей, не зависящей от входной величины), благодаря компенсации аддитивных погрешностей первого и второго каналов (см. там же, с. 122). Однако мультипликативная составляющая погрешности (составляющая, зависящая от входной величины) с использованием дифференциальной схемы включения измерительных каналов не корректируется, что является недостатком этого способа.
Известен способ коррекции систематической погрешности измерительного преобразователя, основанный на принципе компенсации (уравновешивающего преобразования) с использованием отрицательной обратной связи, охватывающей измерительный преобразователь (см. там же, с. 123-125). Способ заключается в формировании выходного сигнала с помощью канала прямого преобразования из разностного сигнала, полученного вычитанием из измеряемой величины однородной ей величины, которая формируется из выходного сигнала с помощью точного обратного преобразователя. Такой способ позволяет уменьшить как аддитивную, так и мультипликативную составляющие систематической погрешности измерительного преобразователя. Однако при этом степень уменьшения погрешностей ограничивается характеристиками канала обратного преобразования и величиной коэффициента преобразования канала прямого преобразования. Другим недостатком этого способа является невозможность его использования при измерении величин, для которых не могут быть реализованы обратные преобразователи (при измерении твердости материалов, ускорения) или они обладают большой погрешностью (при измерении температуры, перемещения).
Известен способ коррекции систематической погрешности измерительного преобразователя (наиболее близкий к заявляемому способу), основанный на логометрическом преобразовании сигналов двух каналов преобразования (см. там же, с. 122 - 123). Суть способа-прототипа заключается в том, что формируют вспомогательный сигнал, пропорциональный напряжению питания параметрического датчика или потребляемого им тока и формируют значение выходного сигнала измерительного преобразователя как отношение вспомогательного сигнала и выходного сигнала параметрического датчика. При использовании большинства параметрических датчиков (индуктивных и емкостных, фото-, термо- и тензорезисторов) их чувствительность пропорциональна напряжению питания, что вызывает мультипликативную составляющую систематической погрешности. Поскольку выходной сигнал логометрического преобразователя является функцией частного от деления двух сигналов, одинаково зависящих от напряжения питания, применение логометрического способа коррекции погрешности позволяет уменьшить мультипликативную составляющую погрешности параметрического датчика. Однако мультипликативная погрешность логометрического измерительного преобразователя, выполняющего операцию деления, при использовании способа-прототипа остается без изменения, что является его недостатком.
Задачей изобретения является повышение точности логометрического измерительного преобразователя с параметрическим датчиком путем коррекции мультипликативной составляющей постоянной систематической погрешности логометрического измерительного преобразователя.
Решение задачи достигается тем, что в способе, основанном на формировании вспомогательного сигнала, пропорционального напряжению питания параметрического датчика или потребляемого им тока, и первого значения f1 выходного сигнала измерительного преобразователя как отношения вспомогательного сигнала и первого значения выходного сигнала датчика, дополнительно, после формирования первого значения f1 выходного сигнала измерительного преобразователя формируют дополнительный сигнал, пропорциональный вспомогательному, складывают его с выходным сигналом датчика и формируют второе значение f2 выходного сигнала измерительного преобразователя как отношение полученного суммарного и вспомогательного сигналов, а значение результата измерения Y(X) определяют по формуле:
где α - коэффициент преобразования дополнительного сигнала;
Kном - номинальное значение коэффициента преобразования логометрического измерительного преобразователя.
Заявляемое техническое решение отличается от прототипа тем, что после формирования первого значения выходного сигнала измерительного преобразователя формируют дополнительный сигнал, пропорциональный вспомогательному, складывают его с выходным сигналом датчика и формируют второе значение f2 выходного сигнала измерительного преобразователя как отношение полученного суммарного и вспомогательного сигналов, а значение результата измерения Y(X) определяют по формуле:
где α - коэффициент преобразования дополнительного сигнала;
Kном - номинальное значение коэффициента преобразования логометрического измерительного преобразователя.
Сравнение заявляемого технического решения с прототипом позволяет установить соответствие его критерию "новизна".
Признаки, отличающие заявляемое техническое решение от прототипа, не выявлены в других технических решениях при изучении данной и смежной областей техники и, следовательно, обеспечивают заявляемому решению соответствие критерию "существенные отличия".
На чертеже приведена структурная схема устройства, иллюстрирующая реализацию предложенного способа. Устройство содержит логометрический измерительный преобразователь 1, основным элементом которого является параметрический датчик ПД (2) измеряемой величины X. Питание датчика 2 осуществляется от источника 3 питания ИП. Первый преобразователь П1 (4) выполняет преобразование напряжения питания Uп в сигнал u(Uп), удобный для последующего преобразования. В качестве сигнала u(Uп) может быть использовано само напряжение Uп. Датчик 2 под действием измеряемой величины X вырабатывает сигнал U(X), который вторым преобразователем П2 (5) преобразуется в сигнал u(X), поступающий одновременно с сигналом u(Uп) на входы устройства деления УД (6). Выходные сигналы устройства деления 6 обрабатываются вычислительным устройством ВУ (7). Второй вход преобразователя 5 через формирователь Ф (8), который формирует дополнительный сигнал, и ключ 9 соединен с входом преобразователя 5. Питание преобразователей 4 и 5, а также устройств 6, 7 и 8 осуществляется от отдельного источника питания.
Величина выходного сигнала U(X) параметрических датчиков, используемых в логометрических измерительных преобразователях, пропорциональна напряжению его питания и может быть представлена в виде:
U(X) = Uп•-f(X),
где Uп - напряжение питания, f(X) - функция передаточной характеристики датчика 2.
Истинное значение выходного сигнала F(X) логометрического измерительного преобразователя в общем случае должно быть сформировано в соответствии с выражением:
где Kном - номинальное значение коэффициента преобразования измерительного преобразователя.
В соответствии с предложенным способом формирование выходного сигнала логометрического измерительного преобразователя выполняют в два этапа, во время которых получают два предварительных значения f1 и f2 сигнала измерительного преобразователя с погрешностями, обусловленными неидеальностью каналов преобразования сигнала параметрического датчика, а также напряжения питания измерительного преобразователя или потребляемого им тока, и затем уточняют значение сигнала измерительного преобразователя по предложенному алгоритму.
На первом этапе формирования сигнала ключ 9 отключен и формирователь 8 вырабатывает сигнал, равный нулю. С помощью первого преобразователя 4 формируют вспомогательный сигнал u(Uп), пропорциональный напряжению питания Uп. С помощью второго преобразователя 5 из выходного сигнала U(X) датчика 2 формируют сигнал u(X), несущий информацию об измеряемом параметре. Делением сигналов u(X) и u(Uп) с помощью устройства деления 6 формируют первое значение выходного сигнала f1 измерительного преобразователя 1. В результате получаем:
где Kдел - передаточный коэффициент устройства деления.
Из-за производственного разброса параметров элементов, а также влияния внешних факторов (температуры, времени) устройством 7 деления, а также преобразователями 4 и 5 вносятся погрешности, и в частности, постоянные систематические мультипликативные погрешности, проявляющиеся в виде постоянного или медленно изменяющегося наклона передаточных характеристик упомянутых блоков. Причем из-за медленного во времени изменения погрешностей их можно считать постоянными на обоих этапах.
С учетом значений коэффициентов преобразования преобразователей 4 и 5 выражение (2) можно записать в виде:
где U(X) - зависимость выходного сигнала датчика 2 от измеряемого параметра при напряжения питания, равном Uп;
Kд и Ku - передаточные коэффициенты преобразователей 4 (канала сигнала датчика) и 5 (канала напряжения питания) соответственно.
Из (3) после преобразования с учетом (1) получаем:
где K = Kд•Kдел/Ku - результирующий коэффициент преобразования преобразователей 4, 5 и устройства деления 6, т. е. всего логометрического измерительного преобразователя 1.
На втором этапе формирования из входного сигнала преобразователя 4 (в данном примере - напряжения Uп питания параметрического датчика 2) включают ключ 9, с помощью формирователя 8 формируют дополнительный сигнал, пропорциональный напряжению Uп, и складывают его с выходным сигналом датчика 2, например, с помощью преобразователя 5. В результате выходной сигнал преобразователя принимает значение, равное Kд[U(X)+α•Uп], где α - коэффициент преобразования дополнительного сигнала, равный результирующему коэффициенту преобразования формирователя 8, второго преобразователя 5 и устройства деления 6, которые образуют канал формирования и передачи дополнительного сигнала.
С помощью устройства 7 формируют второе значения f2 выходного сигнала измерительного преобразователя 1:
Вычитая затем (4) из (5), получаем:
f2-f1 = K•α. (6)
Подставляя значение К из этого уравнение в (4), получаем:
из которого следует, что по значениям f2 и f1 можно определить истинное значение F(X) выходного сигнала:
Это значение определяется с помощью вычислительного устройства 7 и является окончательным результатом измерения Y(X), т.е.
По формуле (8) осуществляется вычисление результата измерения Y(X) в вычислительном устройстве 7. Это значение в пределе (при пренебрежении случайными динамическими и аддитивными погрешностями) равно истинному значению F(X) выходного сигнала устройства, реализующего способ.
Как следует из выражения (8), уточненное значение выходного сигнала Y(X) не зависит от передаточных коэффициентов Kд, Ku и Kдел преобразователей 4,5 и устройства деления 6, т.е. не содержит мультипликативной погрешности измерительного преобразователя.
В качестве параметра, характеризующего режим работы датчика 2, в большинстве случаев может быть также использован ток, потребляемый этим датчиком от источника 3 питания. В таком случае характеристика датчика 2 задается функцией
U(x) = In•f(x),
где Iп - ток, потребляемый датчиком.
Первый преобразователь 4 осуществляет преобразование тока Iп в сигнал u(Iп), формирователь 8 - пропорциональное преобразование тока Iп или сформированного из него сигнала. Приведенные выше доводы остаются справедливыми и в этом случае, а окончательное выражение (8) для выходного сигнала Y(X) - тем же.
В соответствии с изложенным устройство, реализующее предложенный способ, работает следующим образом.
При выключенном ключе 9 преобразователи 4 и 5 формируют сигналы u(Uп) и u(U), которые делятся с помощью устройства 6 деления. Результат деления - первое предварительное значение f1 - запоминается в вычислительном устройстве 7. Затем при включенном ключе 9 формирователь 8 формирует дополнительный сигнал, который подается на второй вход преобразователя 5, с помощью которого выполняется сложение выходного сигнала датчика 2 с дополнительным. Результат второго деления - это второе предварительное значение сигнала f2, которое передается в вычислительное устройство 7, выполняющее вычисление по формуле (8). Результат вычисления является уточненным значением результата Y(X) измерения и подается на выход всего измерительного устройства.
Вычисления по формуле (8) могут быть выполнены не вычислительным устройством 7, а оператором, например, с помощью калькулятора.
Достигаемый реализацией предложенного способа эффект проиллюстрируем конкретным примером.
Пример.
Измерительный преобразователь 1 электронных весов с тензометрическим мостом в качестве датчика 2 и питается напряжением Uп = 2 В, которое поступает на вход устройства деления 6 через усилитель (преобразователь 4) с коэффициентом усиления  Выходное напряжение датчика 2 (напряжение измерительной диагонали мостовой схемы) при номинальной нагрузке равно U(X) = 10 мВ. При Kном = 1000 номинальное значение выходного сигнала измерительного преобразователя должно быть равно F(X) = (0,01/2)•1000 = 5 В. Сигнал U(X) усиливается усилителем (преобразователем 5) с коэффициентом усиления Kд = 600. На входы устройства деления 6 поступают сигналы, равные u(Uп) = 10 В и U(X) = 6 В. При Kдел = 10 и указанных выше параметрах элементов измерительного преобразователя 1 первое значение его выходного сигнала f1 = 6 В, т.е. не равно номинальному значению.
Выходное напряжение датчика 2 (напряжение измерительной диагонали мостовой схемы) при номинальной нагрузке равно U(X) = 10 мВ. При Kном = 1000 номинальное значение выходного сигнала измерительного преобразователя должно быть равно F(X) = (0,01/2)•1000 = 5 В. Сигнал U(X) усиливается усилителем (преобразователем 5) с коэффициентом усиления Kд = 600. На входы устройства деления 6 поступают сигналы, равные u(Uп) = 10 В и U(X) = 6 В. При Kдел = 10 и указанных выше параметрах элементов измерительного преобразователя 1 первое значение его выходного сигнала f1 = 6 В, т.е. не равно номинальному значению.
При преобразовании напряжения Uп коэффициентом α = -0,0025 на втором этапе формирования выходной сигнал преобразователя 5 будет равен
а второе значение выходного сигнала измерительного преобразователя 1
f2 = U(X)•Kдел/u(Uп) = 3,0•10/10 = 3,0 В.
После вычисления по формуле (8) получаем
Таким образом, получено исправленное значение выходного сигнала измерительного преобразователя 1.
Допустим, что при изменении внешних условий напряжение Uп уменьшилось до 1,5 В, что привело к уменьшению выходного сигнала датчика 2 до U(X) = 7,5 мВ; коэффициенты Kд, Ku и Kдел приняли значения: Kд = 400, Ku = 6 и Kдел = 6. В таком случае выходные сигналы преобразователей 4 и 5 равны u(Uп) = 9 В и u(X) = 7,5 мВ•400 = 3 В, а первое значение выходного сигнала измерительного преобразователя 1 на первом этапе формирования равно f1 = 2 В.
На втором этапе формирования сигнал U(X) принимает значение, равное
и второе значение выходного сигнала измерительного преобразователя 1
f2 = U(x)•Kдел/U(Uп) = 1,5•6/9 = 1,0 В.
После вычисления по формуле (8) получаем
Т. е. и в этом случае получено неискаженное значение выходного сигнала измерительного преобразователя 1, равное номинальному значению.
Таким образом, можно сделать вывод, что при реализации предложенного способа формирования выходного сигнала устраняется влияние не только колебаний напряжения питания датчика, но и постоянных систематических мультипликативных погрешностей обоих каналов преобразования логометрических измерительных преобразователей и устройств деления. Причем это выполняется независимо от степени коррелируемости указанных погрешностей между собой. Такой эффект позволяет значительно снизить требования к стабильности электронных блоков логометрических измерительных преобразователей и выполнять измерительные приборы высокой точности на базе грубых измерительных преобразователей, изготовленных из нестабильных элементов.
Изобретение относится к области измерительной техники и может быть использовано для измерения электрических и неэлектрических величин с помощью параметрических датчиков. Техническим результатом является уменьшение постоянных систематических мультипликативных погрешностей измерительных преобразователей. Технический результат достигается за счет того, что после формирования первого значения выходного сигнала измерительного преобразователя формируют дополнительный сигнал, пропорциональный вспомогательному, складывают его с выходным сигналом датчика и формируют второе значение выходного сигнала измерительного преобразователя как отношение полученного суммарного и вспомогательного сигналов. 1 ил.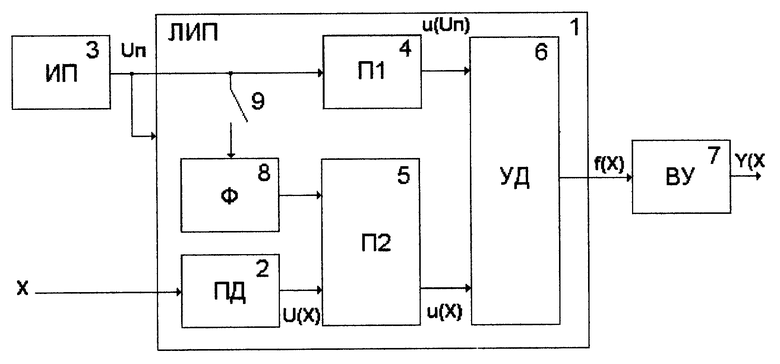
Способ коррекции систематической погрешности измерительного преобразователя с параметрическим датчиком, заключающийся в том, что формируют вспомогательный сигнал, пропорциональный напряжению питания датчика или потребляемого им тока, и формируют первое значение f1 выходного сигнала измерительного преобразователя как отношение вспомогательного сигнала и выходного сигнала датчика, отличающийся тем, что после формирования первого значения f1 выходного сигнала измерительного преобразователя формируют дополнительный сигнал, пропорциональный вспомогательному, складывают его с выходным сигналом датчика и формируют второе значение f2 выходного сигнала измерительного преобразователя как отношение полученного суммарного и вспомогательного сигналов, а значение результата измерения У (Х) определяют по формуле
α - коэффициент преобразования дополнительного сигнала;
кном - номинальное значение коэффициента преобразования логометрического измерительного преобразователя.
| Евтихиев Н.Н | |||
| и др | |||
| Измерение электрических и неэлектрических величин | |||
| Учебное пособие для Вузов | |||
| - М.: Энергоатомиздат, 1989, с.120-123 | |||
| Там же, с.120-122 | |||
| Там же, с.123-125 | |||
| Устройство для поверки функциональных измерительных преобразователей | 1988 |
|
SU1622863A1 |
