Изобретение относится к технике измерительного преобразования перемещений в электрические сигналы путем формирования первичной измерительной информации на базе электромагнитных датчиков и может быть использовано в системах управления подвижными объектами.
Известен преобразователь перемещений, содержащий магнитопроводный подвижный элемент, по две рабочих и компенсационных обмотки, последовательное соединение каждой из которых с соответствующим резистором образует плечо мостового блока, причем в плечах мостового блока, соединенных с шиной нулевого потенциала, установлены соответственно первая рабочая и первая компенсационная обмотки. К диагонали питания мостового блока подключен источник переменного напряжения, а последовательно соединенный с первой рабочей обмоткой задающий резистор связан с управляющим входом блока дискретизации. К двум информационным входам дискретизации подключена измерительная диагональ мостового блока, а два входа блока дискретизации соединены со входами блока деления.
Перемещения подвижного элемента вдоль оси контролируемых перемещений вызывают разнозначные изменения индуктивностей рабочих обмоток. Сигналы, по уровню пропорциональные индуктивностям первой рабочей и первой компенсационной обмоток, дискретизируются в моменты смены направления тока задающего резистора, а направление на выходе блока деления, пропорциональное их отношению, является линейной функцией координат якоря. При этом дикретизированное напряжение первой компенсационной обмотки, устанавливающееся на втором выходе блока дискретизации, является функцией отклонений температуры зоны расположения подвижного элемента от ее нормального значения. То есть устройство способно выдавать совокупную информацию о координатах подвижного элемента и температурных приращениях зоны его расположения [1].
Недостатком известного устройства являются низкая чувствительность и точность производимого им дополнительного измерительного преобразования температурных приращений. Этот недостаток обусловлен, во-первых, использованием для формирования информации о температурных приращениях индуктивности компенсационной обмотки, температурный коэффициент которой, как известно [2, с. 16], на порядок ниже температурного коэффициента для активного сопротивления обмоточного провода и, во-вторых, неприспособленностью к подстройке элементов формирования информации о температурных приращениях, разбросом параметров рабочих компенсационных обмоток.
Известен преобразователь перемещений, содержащий источник переменного напряжения, дифференциальный датчик с магнитопроводным элементом и двумя последовательно соединенными рабочими обмотками, образующими рабочую обмоточную пару, два последовательно соединенных компенсационных обмотки, образующие компенсационную обмоточную пару, причем первые выводы рабочей и компенсационной обмоточных пар подключены к выходу источника переменного напряжения, вторые выводы рабочей и компенсационной обмоточных пар соответственно через задающий и компенсационный резисторы связаны с шиной нулевого потенциала. Точка соединения второго вывода рабочей обмоточной пары и задающего резистора подключена к управляющему входу блока дискретизации, с первым и вторым информационными входами которого связаны соответственно точки соединения обмоток в рабочей и компенсационной обмоточных парах. Первый и второй выходы блока дискретизации соединены со входами блока деления, а выходы блока деления и источника опорного напряжения связаны со входами вычитателя.
Перемещения подвижного элемента вызывают равнозначные приращения индуктивностей рабочих обмоток дифференциального датчика. В моменты смены полярности напряжения задающего резистора блоком дискретизации производится запоминание уровней сигналов, выделяемых в первой рабочей и первой компенсационной обмотках, подключенных соответственно к задающему и компенсационному резисторам. Блок деления формирует напряжение, пропорциональное отношению запомненных уровней и уменьшаемое вычитателем на постоянную величину, равную масштабному коэффициенту деления. Результат вычитания пропорционален координате подвижного элемента. Со второго выхода блока дискретизации снимается напряжение, выражаемое произведением тока первой компенсационной обмотки на ее индуктивность и являющееся функцией температурных приращений в зоне нахождения подвижного элемента. То есть устройство способно выдавать совокупную информацию о координатах подвижного элемента и температурных приращениях зоны его расположения [2, рис.1, с. 16-17].
Недостатком известного устройства является низкие чувствительность и точность формирования измерительной информации о приращениях температуры в зоне расположения подвижного элемента. Наличие данного недостатка обусловлено теми же причинами, которые указаны выше при рассмотрении первого устройства - аналога [1].
По технической сущности наиболее близок к заявляемому устройству преобразователь перемещений, содержащий источник переменного напряжения, дифференциальный датчик, компенсационную обмоточную пару, два задающих резистивных элемента - постоянных резистора, два блока дискретизации, дифференциатор, первый вычитатель, два блока деления, блок масштабного суммирования, источник опорного напряжения, блок умножения - деления, шину нулевого потенциала, причем дифференциальный датчик состоит из магнитопроводного подвижного элемента и двух последовательно соединенных обмоток, образующих рабочую обмоточную пару, компенсационная обмоточная пара состоит из двух последовательно соединенных компенсационных обмоток, блок масштабного суммирования включает в себя два делителя дискретизированного напряжения, два сумматора и второй вычислитель, выход которого через первый и второй делитель дискретизированного напряжения связан с первыми входами соответственно первого и второго сумматоров, первые выводы рабочей и компенсационной обмоточных пар подключены к выходу источника переменного напряжения, их вторые выводы соответственно через первый и второй задающие резистивные элементы связаны с шиной нулевого потенциала, точка соединения второго вывода рабочей обмоточной пары и первого задающего резистивного элемента подключена к управляющему входу первого блока дискретизации, с первым информационным входом которого связана точка соединения обмоток дифференциального датчика, точка соединения компенсационных обмоток связана со вторым информационным входом первого блока дискретизации и первым информационным входом второго блока дискретизации, точка соединения второго вывода компенсационной обмоточной пары и второго задающего резистивного элемента подключена ко второму информационному входу второго блока дискретизации и ко входу дифференциатора, выход которого подключен к управляющему входу второго блока дискретизации, первый выход первого блока дискретизации подключен к первому входу первого вычитателя, выход которого соединен со входом делимого первого блока деления, второй выход первого блока дискретизации подключен ко второму входу первого вычитателя и ко входу делителя первого блока деления, выход которого связан со входом первого множителя блока умножения-деления, первый и второй выходы второго блока дискретизации подключены соответственно ко входам делимого и делителя второго блока деления, выход которого связан с первым входом второго вычитателя, первый выход источника опорного напряжения подключен ко второму входу второго вычитателя, а его второй выход соединен со вторыми входами первого и второго сумматоров, выходы которых соединены соответственно со входами второго множителя и делители блока умножения - деления.
Перемещения подвижного элемента вызывают разнозначные изменения индуктивностей, характеризующих обмотки дифференциального датчика. В моменты смены полярности напряжения первого задающего резистивного элемента первым блоком дискретизации производятся запоминание и выдача со своих первого и второго выходов напряжений, зависящих от индуктивностей обмотки датчика и компенсационной обмотки, связанных соответственно с первым и вторым задающими резистивными элементами. В моменты смены полярности выходного сигнала дифференциатора вторым блоком дискретизации производятся запоминание и выдача со своих первого и второго выходов напряжений, зависящих от активных сопротивлений, во-первых, компенсационной обмотки, связанной со вторым задающим резистивным элементом, и, во-вторых, самого второго задающего резистивного элемента. Первый вычитатель реализует операцию получения разности напряжений, снимаемых с первого и второго выходов первого блока дискретизации, а на выходе первого блока деления формируется сигнал, по уровню пропорциональный отношению выходного напряжения первого вычитателя к величине сигнала, поступающего со второго выхода первого блока дискретизации. Уровень сигнала на выходе второго блока деления пропорционален отношению напряжений соответственно на первом и втором выходах второго блока дискретизации. На выходе второго вычитателя формируется сигнал, уменьшенный сравнительно с выходным напряжением второго блока деления на составляющую, не зависимую от температуры в зоне нахождения подвижного элемента, а выходное напряжение второго вычитателя пропорционально отклонениям температуры указанной зоны от нормального значения. Блоком масштабного суммирования формируются два выдаваемых сумматорами напряжения, коэффициенты температурных колебаний которых соответствуют температурным коэффициентам параметров, определяющих индуктивность обмотки дифференциального датчика, связанной с первым задающим резистивным элементом. Компенсация влияния температуры на данные параметры завершается при формировании блоком умножения-деления отношения произведения выходных напряжений первого блока деления и первого сумматора к выходному напряжению второго сумматора. Уровень выходного сигнала блока умножения-деления пропорционален координатам подвижного элемента на оси контролируемых перемещений. Таким образом, данное устройство способно выдавать совокупную информацию о координатах подвижного элемента и о приращениях температуры в зоне его распределения [3].
Недостатком устройства-прототипа являются низкие чувствительность и точность преобразования приращений температуры в зоне нахождения подвижного элемента. Наличие такого недостатка обуславливается, во-первых, тем, что для получения информации о температурных приращениях используется активное сопротивление лишь единственной обмотки устройства и, во-вторых, реальным на практике разбросом параметров, характеризующих элементы формирования первичной температурозависимой информации (обмотки, задающие резистивные элементы), а также отсутствием подстраиваемых (регулируемых) элементов формирования температурозависомой информации устройства-прототипа.
Рассмотрим количественное описание погрешности, относящейся к преобразованию устройством-прототипом приращений T температуры в зоне расположения дифференциального датчика и его подвижного элемента. Обозначим при этом через u и δ соответственно выходное напряжение и приведенную погрешность блока (элемента), индексом которого в соответствии с фиг.1 описания устройства-прототипа [3] снабжается данный символ. Погрешность формирования разностного сигнала на входах элемента непосредственной выдачи информации о величине T - второго вычитателя 27, которая обусловлена несоответствием параметров компенсационных обмоток, второго резистивного элемента, а также коэффициентов преобразования второго блока дискретизации и блока деления, представляется следующим образом:
где индексы "р" и "н" здесь и ниже указывают соответственно на реальные и номинальные величины, а второй индекс символа напряжения U17-1 соответствует опорному (образцовому) сигналу постоянного напряжения, снимаемому с первого выхода источника 17; через UN обозначена нормирующая величина, которая соответствует выходному напряжению вычитателя 27 при достижении преобразуемым температурным приращением T ∈ [-Tг,Tг] своего верхнего граничного значения.
Выражения компонент приведенной формулы для γ
λ = (1+δ14)(1+δ25)/(1+δ26);
χ = (1+σк)/(1+σRK);
Sн= rн/Rн;
U17-1=Vм(Sн+1;
UN= U
dт=aTг,
где
Vм= V
Iк - амплитуда тока компенсационных обмоток;
rк, Rк - активные сопротивления соответственно компенсационной обмотки и второго задающего резистивного элемента;
a - известный температурный коэффициент активного сопротивления обмотки (компенсационной или относящейся к дифференциальному датчику);
σк= (rк/rн)-1, σRK= (Rк/Rн)-1 - коэффициенты отклонений активных сопротивлений соответственно компенсационной обмотки и второго задающего резистивного элемента от своих номинальных значений rн и Rн, общих с соответствующими параметрами обмоток дифференциального датчика и первого задающего резистивного элемента.
С учетом приведенных развернутых выражений компонент U14, UN

Максимальное значение maxγ
min(λ,κ) > 1;
близки к maxγ
Для таких реальных значений параметров, входящих в количественное описание γ
Оценка полной ошибки преобразования приращений температуры в зоне подвижного элемента производится путем суммирования значений γ
U
служащую для описания выходного напряжения второго вычитателя 27, можно следующим образом выразить чувствительность измерительного преобразования величины T устройством-прототипом:
S
Отсюда видно, что использование для получения сигнала U27 (T) активного сопротивления одной из обмоток устройства-прототипа характеризуется наличием лишь множителя Sн в выражении чувствительности формирования информации о величине T.
Целью настоящего изобретения является повышение точности и чувствительности формирования информации о приращениях температуры в зоне подвижного элемента.
Для достижения поставленной цели в преобразователь перемещений, содержащий источник переменного напряжения, дифференциальный датчик с магнитопроводным подвижным элементом и двумя обмотками, последовательное соединение которых образует обмоточную пару, задающий резистивный элемент с постоянным резистором, два блока дискретизации, дифференциатор, первичный вычитатель, два блока деления, блок масштабного суммирования, источник опорного напряжения, блок умножения-деления, шину нулевого потенциала, причем блок масштабного суммирования включает в себя второй вычитатель, два сумматора, два делителя дискретизированного напряжения, выход второго вычитателя соединен со входами первого и второго делителей дискретизированного напряжения, выходы которых подключены соответственно к первым входам первого и второго сумматоров, первый вывод обмоточной пары датчика соединен с выходом источника переменного напряжения, один из выводов задающего резистивного элемента подключен к шине нулевого потенциала, а другой его вывод связан со вторым выводом обмоточной пары датчика и управляющим входом первого блока дискретизации, к первому информационному входу которого подключена точка соединения обмоток датчика, первый выход первого блока дискретизации связан с первым входом первого вычислителя, выход которого соединен со входом делимого первого блока деления, второй выход первого блока дискретизации подключен ко второму входу первого блока вычитания и ко второму входу делителя первого блока деления, выход которого связан со входом первого множителя блока умножения-деления, выход дифференциатора соединен с управляющим входом второго блока дискретизации, первый и второй выходы которого связаны со входами соответственно делимого и делителя второго блока деления, подключенного к первому входу второго вычитателя, первый выход источника опорного напряжения соединен со вторым входом второго вычитателя, второй выход источника опорного напряжения подключен ко вторым входам двух сумматоров, выходы которых связаны со входами соответственно второго множителя и делителя блока умножения-деления, введены два делителя переменного напряжения и переменный резистор, точка соединения выхода источника переменного напряжения и первого вывода обмоточной пары датчика подключена к первому информационному входу второго блока дискретизации и ко входу первого делителя переменного напряжения, выход которого связан со вторым информационным входом первого блока дискретизации, точка соединения второго вывода обмоточной пары датчика, задающего резистивного элемента и управляющего входа первого блока дискретизации подключена ко входам дифференциатора и второго делителя переменного напряжения, выход которого связан со вторым информационным входом второго блока дискретизации, задающий резистивный элемент выполнен в виде последовательного соединения постоянного и переменного резисторов.
Анализ существенных признаков заявляемого технического решения показывает следующее.
Признак введения в преобразователь перемещений делителей напряжения указан в описании известного устройства, где данный признак использован для получения требуемого вида выходной величины функционального преобразователя [5, фиг. 1, поз. 48]. С действием заявляемого устройства и целями введения делителей переменного напряжения в его состав это не соотносится; само по себе такое известное введение не способно достичь цели снижения погрешностей преобразования температурных приращений из-за разброса элементов формирования первичной информации и повышения чувствительности и указанного преобразования температуры.
Признак связи точки присоединения задающего резистивного элемента, второго вывода обмоточной пары и управляющего входа первого блока дискретизации со входом дифференциатора использован в известном преобразователе перемещения [6] с целью формирования сигнала, зависимого от скорости подвижного элемента. Взятый изолированно, он не способен обеспечить выполнение цели настоящего изобретения. То есть если перенести этот признак на устройство-прототип [3, фиг.1], то полученное при этом техническое решение останется обладающим теми же точностью и чувствительностью, которые обусловлены рассмотренными выше причинами.
Признак исполнения резистивного элемента, связанного со входом нуль-органа, в виде переменного резистора, известен по описанию преобразователя угол-код [7]. Назначением такого исполнения является обеспечение возможности регулировки порога срабатывания нуль-органа, что не связано ни с заданием моментов дискретизации первичной аналоговой информации (в преобразователе угол-код [7] измерительный сигнал детектируется), ни с нейтрализацией параметров в средствах ее формирования.
Признаки подключения точки соединения первого вывода обмоточной пары датчика и выхода источника переменного напряжения к первому информационному входу второго блока дискретизации и ко входу первого делителя переменного напряжения, выход которого связан со вторым информационным входом первого блока дискретизации, а также признаки подключения точки соединения второго вывода обмоточной пары датчика, задающего резистивного элемента и управляющего входа первого блока дискретизации ко входу второго делителя переменного напряжения, выход которого связан со вторым информационным входом второго блока дискретизации, в известных технических решениях, относящихся к области преобразования перемещений на основе использования электромагнитных датчиков, отсутствуют.
Только совокупность отличительных признаков заявляемого устройства способна обеспечить достижение цели настоящего изобретения.
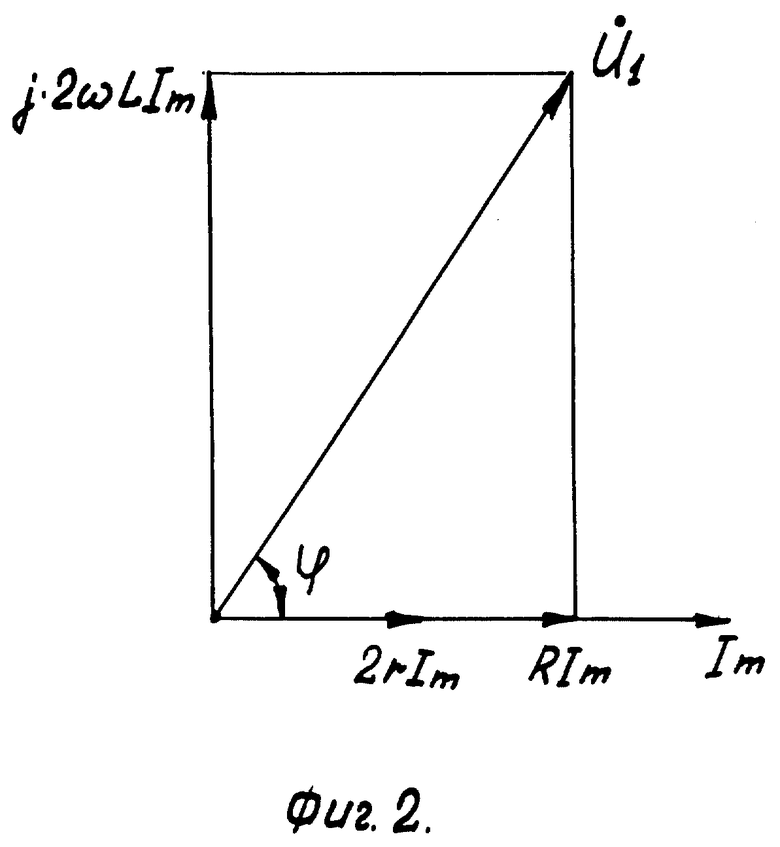
На фиг. 1 показана функциональная схема заявляемого устройства, на фиг. 2 изображена векторная диаграмма тока и напряжений активных и индуктивных элементов формирования первичной аналоговой информации.
Преобразователь перемещений (фиг. 1) содержит источник 1 переменного напряжения, дифференциальный датчик 2, задающий резистивный элемент 3, первый 4 и второй 5 делители переменного напряжения, дифференциатор 6, первый 7 и второй 8 блоки дискретизации, первый вычитатель 9, первый 10 и второй 11 блоки деления, источник 12 опорного напряжения, блок 13 масштабного суммирования, блок 14 умножения-деления, шину 15 нулевого потенциала, шину 16 выдачи информации о перемещениях, шину 17 выдачи информации о температурных приращениях. Один из выводов источника 1 (нижний по фиг.1) подключен к шине 15, а другой (верхний) является выходом источника 1. Датчик 2 содержит магнитопроводный якорь 18, первую 19 и вторую 20 обмотки. Последовательное соединение обмоток 19-20 образует обмоточную пару датчика 2, первым и вторым выводами которой являются соответственно верхний и нижний по фиг.1, а третий вывод обмоточной пары исходит из точки соединения обмоток 19-20. Задающий резистивный элемент 3 состоит из последовательно включенных постоянного 21 и переменного 22 резисторов, причем верхний по фиг.1 вывод элемента 3 является у него первым, а нижний вывод - вторым.
Блок 7 содержит первый компаратор 23, первый формирователь 24 импульсов, первое 25 и второе 26 устройства выборки-хранения (УВХ). Блок 8 содержит второй компаратор 27, второй формирователь 28 импульсов, третье 29 и четвертое 30 УВХ. Блок 13 содержит второй вычитатель 31, первый 32 и второй 33 делители дискретизированного напряжения, первый 34 и второй 35 сумматоры.
В блоках 7 - 8 верхние по фиг. 1 входы компараторов 23, 27 являются первыми, их вторые (нижние) входы замкнуты на шину 15. В блоке 7 выход компаратора 23 через формирователь 24 соединен с управляющими верхними входами перового 25 и второго 26 УВХ. В блоке 8 выход компаратора 27 через формирователь 28 связан с управляющими (верхними) входами третьего 29 и четвертого 30 УВХ. В блоке 13 выход вычитателя 31 связан со входами делителей 32 - 33, выходы которых подключены к первым (левым) входам соответственно сумматоров 34 - 35, вторые (правые) их входы соединены между собой.
Верхний и нижний входы каждого из вычитателей 9, 31 является соответственно его первым и вторым входами. Левый и правый входы каждого из блоков 10 - 11 являются соответственно его входом делимого и входом делителя. Левый и правый выводы источника 12 являются соответственно его первым и вторым выходами. Входы блока 14 слева направо именуются: вход первого множителя, вход второго множителя, вход делителя. Первые входы компараторов 23, 27 являются управляющими входами блоков соответственно 7-8, информационные (левые) входы УВХ 29-30 блока 8 являются первыми и вторыми информационными входами блоков соответственно 7-8, а выходы УВХ 25-26 блока 7 и УВХ блока 8 являются первыми и вторыми выходами блоков соответственно 7-8.
Выход источника 1 соединен с первым выводом обмоточной пары датчика 2, со входом делителя 4, с первым информационным входом блока 8. Второй вывод обмоточной пары датчика 2 соединен с первым выводом резистивного элемента 3, с управляющим входом блока 7, со входами делителя 5 и дифференциатора 6. Третий вывод обмоточной пары связан с первым информационным входом блока 7, ко второму информационному входу которого подключен выход делителя 4. Второй вывод резистивного элемента 3 связан с шиной 15. Первый выход блока 7 подключен к первому входу вычитателя 9, выход которого соединен со входом делимого блока 10. Второй выход блока 7 подключен ко второму входу вычитателя 9 и ко входу делителя блока 10, выход которого связан со входом первого множителя блока 14. Выходы дифференциатора 6 и делителя 5 подключены соответственно к управляющему и второму информационному входам блока 8, первый и второй выходы которого связаны соответственно со входами делимого и делителя блока 11. Выход блока 11 и первый выход блока 12 подключены соответственно к первому и второму входам вычитателя 31, а второй выход блока 12 связан с точкой соединения вторых входов сумматоров 34-35, выходы которых подключены соответственно ко входам второго множителя и делителя блока 14. Выход блока 14 связан с шиной 16, точка соединения выхода вычитателя 31 со входами делителей 32-33 подключена к шине 17.
Датчик 2 вынесен в зону расположения подвижного объекта наблюдения (на фиг. 1 не показан), к которому прикреплен подвижный элемент 18.
Устройство работает следующим образом.
Магнитопроводный подвижный элемент 18 вместе с объектом наблюдения перемещается в магнитном поле переменного тока i обмоток 19-20, создаваемого за счет приложения выходного переменного напряжения U1 к ветви, образованной последовательным соединением обмоточной пары датчика 2 и резистивного элемента 3, причем
U1= Umsinωt,
где
Um,ω - амплитуда и круговая частота,
t - время.
Перемещения x подвижного элемента 18 вдоль оси контролируемых координат дифференциально воздействуют на величины индуктивностей L19 первой и L20 второй обмоток датчика, и в пределах ±xг диапазона координатного преобразования
где
l - коэффициент перераспределения индуктивностей обмоточной пары; балансные индуктивности обмоток соответственно 19-20 при положении x=0 подвижного элемента 18.
балансные индуктивности обмоток соответственно 19-20 при положении x=0 подвижного элемента 18.
Для определенности полагаем, что действительные значения балансной индуктивности  и активного сопротивления r19 обмотки 19 равны соответственно значениям балансной индуктивности
и активного сопротивления r19 обмотки 19 равны соответственно значениям балансной индуктивности  и активному сопротивлению r20 обмотки 20, то есть
и активному сопротивлению r20 обмотки 20, то есть r19=r20=r; L19=-lx+L, L20=lx+L;
r19=r20=r; L19=-lx+L, L20=lx+L;
при этом величины балансной индуктивности L и активного сопротивления r обмотки, как первой, так и второй, характеризуются разбросом своих значений от образца к образцу датчика 2. Тем не менее, ниже будет показано, что, если бы потребовался учет различий между значениями парных параметров датчика 2, такой учет не внес бы никаких изменений в существенные признаки заявляемого устройства. На элементы датчика 2 воздействуют колебания температуры в зоне его установки. Параметры обмоточной пары датчика 2 и отклонения T температуры в области расположения наблюдаемого объекта от нормального значения 293K (температурные приращения) связаны следующим образом:
l=l0(1+alT); L=L0(1-aLT); r=r0(1+aT),
где
l0, L0, r0 - значения параметров l, L, r при нормальной температуре;
al, aL, a - известные температурные коэффициенты параметров соответственно l, L, r.
Значения al, aL определяются путем физического или математического моделирования воздействия изменений теплового режима на обмоточную пару датчика 2, значение a соответствует справочным данным.
Остальные элементы заявляемого устройства, находящиеся на удалении от датчика 2, работают в стационарном тепловом режиме.
Все входы блоков 7-8, а также делителей 4-5 и дифференциатора 6 являются высокоимпедансными, и их подключение к выводам обмоточной пары датчика 2 и резистивного элемента 3 практического влияния на распределение напряжений между обмотками 19-20 и резистивным элементом 3 не оказывает.
Амплитуда тока в обмотках 19-20
Im= Um[(2ωL)2+(2r+R)2]-1/2,
где
R - активное сопротивление резистивного элемента 3, складывающееся из сопротивления Rc постоянного резистора 21 и сопротивления переменного резистора 22.
В свою очередь, сопротивление резистора 22 определяется параметром его подстройки 0 ≤ ζ ≤ 1, выражающим относительную часть полного (максимального) сопротивления Rm резистора 22, включаемую в параметр R. То есть R = Rc+ζRm.
Все рассматриваемые ниже выходные напряжения блоков преобразователя перемещений, как U1, отсчитываются относительно нулевого потенциала шины 15. При этом индексы символов U, обозначающих упомянутые напряжения, соответствуют позициям блоков (элементов) на фиг. 1. Если блок имеет несколько выходов, то порядковый номер выхода или вывода отмечается второй частью индекса возле символа U (проставляемой через черточку).
Ток i запаздывает по фазе относительно напряжения U1 (фиг. 2):
здесь комплексная амплитуда напряжения U1.
комплексная амплитуда напряжения U1.
С первого вывода обмоточной пары датчика 2 снимается напряжение
U2-1=(L19+L20)i'+i(2r+R)=2Li' + i(2r+R),
где
i′= (di/dt) = ωImcos(ωt-ϕ).
На втором выводе обмоточной пары датчика 2 выделяется тот же сигнал, что и на выходе резистивного элемента 3:
U2-2=U3=iR,
а с третьего вывода обмоточной пары снимается напряжение
U2-3=L20i'+i(r+R)=(lx+L)i'+i(r+R).
Коэффициент K4 передачи сигнала делителем 4 выбирается равным 0,5, так, что выходное напряжение делителя 4
U4=K4U2-1=Li'+i(2r+R)/2.
При неидентичности индуктивностей обмоток 19-20, соответствующих положению x= 0 подвижного элемента 18 (L19≠L20=L), коэффициент K4 может устанавливаться согласно отношению L/(L19+L), тогда правая часть вышеприведенного выражения для U4 остается в силе.
Каждый из компараторов 23, 27 изменяет свое выходное состояние с нулевого на единичное, то есть изменяет уровень своего выходного сигнала с низкого на высокий при смене полярности сигналов на его первом входе с отрицательной на положительную, а выдача каждым из формирователей 24, 28 импульса осуществляется при указанном изменении выходного состояния компаратора, предшествующего данному формирователю в схеме заявляемого устройства.
В моменты t
U26= Uн(t
Уровни U2-3(t
На выходе вычитателя 9 формируется разность
U9= U25-U26= ωImlx,
а блок 10 реализует операцию получения сигнала
где
V - масштабный коэффициент операции деления с размерностью напряжения.
Дифференциатор 6 вырабатывает сигнал, по уровню пропорциональный производной напряжения, выделяемого резистивным элементом 3:
U6=-Kp(dU3/dt)=KpR'im,
где
Kp - параметр дифференциатора, выбираемый для определенности равным ω-1, то есть U6= ImRcos(ωt-ϕ).
Смена полярности сигнала U6 с отрицательной на положительную происходит в моменты времени
t
и сопровождается переводом выходного состояния компаратора 27 из нулевого в единичное, а также выдачей формирователем 28 импульсов, управляющих установлением на выходах УВХ 29-30 напряжений
где
k5= ψ < 1 - заданный коэффициент передачи сигнала делителя 5.
Уровни сигналов на выходах блока 8 обновляются через каждый период времени длительностью Tt.
Блок 11 формирует сигнал
Величина активных сопротивлений как обмоток датчика 2, так и постоянного резистора 2 неидентичны их номинальным значениям соответственно rH и RCH, причем
ro= rн(1+σ); Rc= Rсн(1+σR),
где
σ, σR - коэффициенты разброса параметров соответственно r, Rc. За номинальную величину активного сопротивления R принимается сумма
Rн= Rсн+ζнRm,
ζн - номинальное значение параметра подстройки резистора 22.
С первого выхода источника 12 выдается опорное (образцовое) напряжение, заданное значением
U12-1= Vm(2Sн+1)/ψ;
Sн=rн/Rн.
Вычитатель 31 реализует получение разности
За счет подстройки резистора 22 сопротивлению R придается значение, обеспечивающее выполнение условия
U11(r)=U11(rH(1+aT)),
что равносильно обеспечению равенства (r0/R)=SH. При этом переменным резистором 22 воспроизводится сопротивление
Исходный подбор значений Rm, ζн осуществляется, исходя из необходимости соблюдения неравенств 0 ≤ ζ ≤ 1 в границах задания Rc, σ, σR.
Подстройка резистора 22 каждого изготавливаемого образца преобразователя перемещений осуществляется после сборки данного образца при нормальной температуре его блоков, элементов (в том числе датчика 2). Результаты подстройки контролируются по факту достижения равенства напряжений U11(T=0) и U12-1.
В случае, когда действительные значения активных сопротивлений r19 и r20 обмоток соответственно 19-20 ощутимо расходятся между собой, имеем:
где
σ19, σ20≠ σ19 - коэффициенты разброса активных сопротивлений обмоток соответственно 19-20.
Тогда условие подстройки резистора 22, в выражении которого
2r0/R=2rH/RH
под величиной 2r0 понимается сумма (r19,0+r20,0), представляется следующим образом:
Принятие обозначения σ = 0,5(σ19+σ20) удостоверяет отсутствие принципиальных отличий данного случая подстройки резистора 22, характеризующегося взаимной неидентичностью активных сопротивлений обмоток 19-20, от рассмотренной выше подстройки резистора 22, которая осуществляется при равенстве действительных значений активных сопротивлений r19 и r20 в пределах одного образца преобразователя перемещений.
После подстройки резистора 22, обеспечивающей выполнение условия (r0/R)= SH, выходная величина блока 11 принимает вид:
U11= Vm(2Sн(1+aT)+1)/ψ,
а с выхода вычитателя 31 снимается напряжение
U31= 2VmSнaT/ψ,
то есть влияние разброса параметров активного сопротивления обмоточной пары датчика 2 и резистивного элемента 3 на результат преобразования приращений температуры в зоне расположения подвижного элемента 18 оказывается нейтрализованным.
Коэффициенты преобразования K32, K33 делителей соответственно 32-33 подбираются следующим образом:
K32= ψaL(2Sнa)-1; K33= ψal(2Sнa)-1,
так что с выходов делителей снимаются напряжения
U32=K32U31=VmaLT; U33=K33U31=VmalT.
Выходные сигналы сумматоров 34-35 формируются как результат операций сложения величин соответственно U32, U33 с опорным напряжением U12-2=Vm, поступающим в блок 13 со второго выхода источника 12.
U34=U12-2+U32=Vm(1+aLT);
U35=U12-2+U33=Vm(1+alT);
Выходное напряжение блока 14 следующим образом зависит от уровней выходных сигналов блока 10, а также сумматоров 34-35:
K=K14VmlH(LH)-1,
где
K14 - масштабный коэффициент операции умножения-деления напряжений.
Таким образом, первая выходная величина U14 заявляемого устройства, выдаваемая по шине 16, пропорциональна координатам подвижного элемента 18 на оси контролируемых перемещений, а его вторая выходная величина U31, выдаваемая по шине 17, пропорциональна отклонениям температуры в зоне установки дифференциального датчика 2 (в зоне объема наблюдения) от нормального значения, причем чувствительность измерительного преобразования указанных температурных приращений
Sт= dU31/dT = 2VmSнa/ψ.
Сравнительно с устройством-прототипом заявляемое устройство обладает повышенной чувствительностью формирования измерительной информации о приращениях температуры в зоне объекта наблюдения, поскольку обеспечивает, во-первых, использование двух обмоток дифференциального датчика для получения данной измерительной информации, и, во-вторых, обратную пропорциональность выходного температурозависимого сигнала от коэффициента ψ < 1. Отношение величин чувствительностей преобразования температурных приращений заявляемого устройства (Sт) и прототипа (S
Sт/S
Далее, за счет нейтрализации влияния разброса активных сопротивлений обмоточной пары и задающего резистивного элемента на результат преобразования приращений температуры в зоне наблюдаемого объекта погрешность данного преобразования у заявляемого устройства оказывается ниже, чем соответствующая погрешность устройства-прототипа.
Действительно, вносящая главный вклад в общую погрешность преобразования заявляемым устройством приращений T компонента  которая относится к формированию сигналов на входе второго вычислителя 31 (фиг.1), имеет вид
которая относится к формированию сигналов на входе второго вычислителя 31 (фиг.1), имеет вид
где индексы "р" и "н" указывают соответственно на реальные и номинальные величины:
Развернутое выражение для сигнала U
U
λ = (1+δ11)(1+δ29)/(1+δ30).
То есть
откуда
Составляя отношение полученного при анализе недостатка устройства-прототипа выражения для уровня maxγ
Учитывая полную аналогичность друг другу вторых вычитателей прототипа и заявляемого устройства, заключаем, что имеет место принципиальное снижение погрешности формирования информации о величине T заявляемым устройством.
Так, для использованных при вычислении погрешности maxγ
maxγ
что соответствует снижению уровня данной погрешности с 5,9% (прототип) до 2,3% (заявляемое устройство). Погрешность второго вычитателя для реальных уровней напряжения U31(Tг) одного - нескольких вольт имеет порядок не более 0,1%. Таким образом, в рассмотренном случае практического сочетания параметров заявляемого устройства и прототипа погрешность формирования информации о температурных приращениях заявленным устройством снижена более, чем в 2,5 раза сравнительно с прототипом.
Источники информации
1. Авторское свидетельство СССР N 1441175, кл. G 01 B 7/00, 1987.
2. Домрачев В. Г. , Никонов А.И. Логометрическая коррекция дискретной информации в индуктивных датчиках перемещений // Измерительная техника. - 1994, N 2, с. 16-18.
3. Авторское свидетельство СССР N 1670362, кл. G 01 B 7/00, 1991.
4. Алексенко А.Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых ИС. - М.: Радио и связь, 1981, 224с.
5. Авторское свидетельство СССР N 1295518, кл. H 03 M 1/50, 1987.
6. Авторское свидетельство СССР N 1768935, кл. G 01 B 7/00, 1992.
5. Авторское свидетельство СССР N 364958, кл. G 08 C 9/04, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2297009C1 |
| ИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ В ВИДЕ ДЕЛИТЕЛЯ НАПРЯЖЕНИЯ | 1993 |
|
RU2118826C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ РАСПРЕДЕЛЕНИЯ ВЕРОЯТНОСТЕЙ СЛУЧАЙНОГО ПРОЦЕССА | 2000 |
|
RU2174706C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖУЩЕГОСЯ КАБЕЛЬНОГО ИЗДЕЛИЯ | 1999 |
|
RU2183838C2 |
| ИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬНЫЙ МОСТ | 1993 |
|
RU2117304C1 |
| Способ преобразования перемещений и устройство для его осуществления | 1988 |
|
SU1518661A1 |
| Преобразователь перемещений | 1990 |
|
SU1768935A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1994 |
|
RU2096927C1 |
| ИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ В ВИДЕ ДЕЛИТЕЛЯ НАПРЯЖЕНИЯ | 1993 |
|
RU2117951C1 |
Область использования: в системах управления подвижными объектами. Преобразователь содержит источник переменного напряжения, дифференциальный датчик с магнитопроводным элементом, задающий резистивный элемент, два делителя переменного напряжения, дифференциатор, два блока дискретизации, два вычитателя, два блока деления, источник опорного напряжения, блок масштабного суммирования, блок умножения деления, шину нулевого потенциала, шины выдачи информации о перемещениях и о температурных приращениях. Каждый блок дискретизации включает компаратор, формирователь импульсов, два устройства выборки-хранения. Блок масштабного суммирования включает вычитатель, два делителя дискретизированного напряжения, два сумматора. Техническим результатом является повышение точности и чувствительности формирования информации о приращениях температуры в зоне подвижного элемента. 2 ил.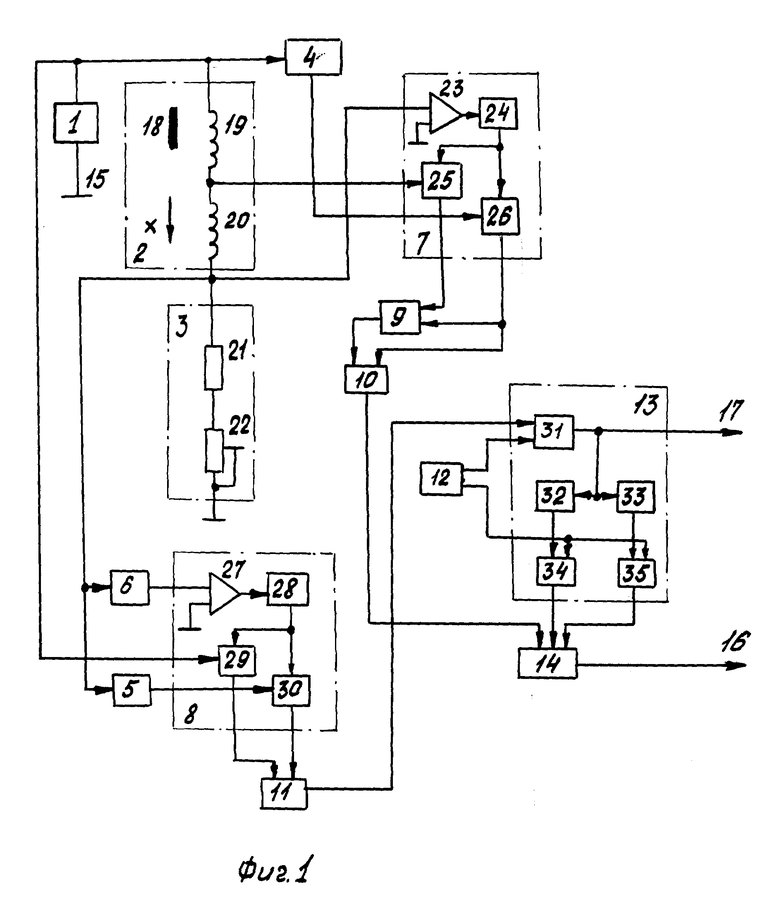
Преобразователь перемещений, содержащий источник переменного напряжения, дифференциальный датчик с магнитопроводным подвижным элементом и двумя обмотками, последовательное соединение которых образует обмоточную пару, задающий резистивный элемент, содержащий постоянный резистор, два блока дискретизации, дифференциатор, первый вычитатель, два блока деления, блок масштабного суммирования, источник опорного напряжения, блок умножения-деления, шину нулевого потенциала, причем блок масштабного суммирования включает в себя второй вычитатель, два сумматора, два делителя дискретизированного напряжения, входы которых подключены к выходу второго вычитателя, а выходы связаны соответственно с первыми входами первого и второго сумматоров, первый вывод обмоточной пары датчика соединен с выходом источника переменного напряжения, один из выводов задающего резистивного элемента подключен к шине нулевого потенциала, а другой его вывод связан с вторым выводом обмоточной пары датчика и управляющим входом первого блока дискретизации, к первому информационному входу которого подключена точка соединения обмоток датчика, первый выход первого блока дискретизации связан с первым входом первого вычитателя, выход которого соединен с входом делимого первого блока деления, второй выход первого блока дискретизации подключен к второму входу первого блока вычитания и входу делителя первого блока деления,
выход которого связан с входом первого множителя блока умножения-деления, выход дифференциатора соединен с управляющим входом второго блока дискретизации, первый и второй выходы которого связаны с входами соответственно делимого и делителя второго блока деления, подключенного к первому входу второго вычитателя, первый выход источника опорного напряжения соединен с вторым входом второго вычитателя, второй выход источника опорного напряжения соединен с вторыми входами двух сумматоров, выходы которых связаны со входами соответственно второго множителя и делителя блока умножения-деления, отличающийся тем, что в него введены два делителя переменного напряжения и переменный резистор, точка соединения источника переменного напряжения и первого вывода обмоточной пары датчика подключена к первому информационному входу второго блока дискретизации и к входу первого делителя переменного напряжения, выход которого связан с вторым информационным входом первого блока дискретизации, точка соединения второго вывода обмоточной пары датчика, задающего резистивного элемента и управляющего входа первого блока дискретизации подключена к входам дифференциатора и второго делителя переменного напряжения, выход которого связан с вторым информационным входом второго блока дискретизации, задающий резистивный элемент выполнен в виде последовательного соединения постоянного и переменного резисторов.
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| Преобразователь перемещений | 1987 |
|
SU1441175A1 |
| RU 94037846 A1, 20.08.96. | |||
