1
Изобретение, предназначаемое для наведения антенных средств слежения за космическими аппаратами (КА), относится к области антенной техники, а именно к устройствам управления антеннами.
Б известных устройствах программного управления (УПУ) автоматическое наведение антенны на максимум принимаемого сигнала или сопровождение КА с выводом их в центральную зону пеленгациоиной характеристики производится с помощью устройства формирования и ввода поправок в программные значения координат по сигналу ошибки каналов автосопровождения. Примером может служить УПУ (типа СПУ), которое содержит устройства, обеспечивающие выработку программных значений координат (с помощью программной перфоленты) и устройства формирования и ввода поправок. Последние содержат устройства, накапливающие информацию с каналов автосопровождения, преобразователи «напряжение - цифра и устройства ввода цифрового кода поправок в СПУ-3 для коррекции программных значений координат.
Целью изобретения является создание устройства, обеспечивающего коррекцию программных значений координат для настройки на максимум сигнала, принимаемого приемником в главном лепестке единственной и неподвижной относительно оси зеркала антенны диаграммы направленности. Это дает возможность автоматически устанавливать максимальное значение отношения сигнал/шум при одновре.менном существенном упрощении облучателей, ВЧ-трактоз и приемников.
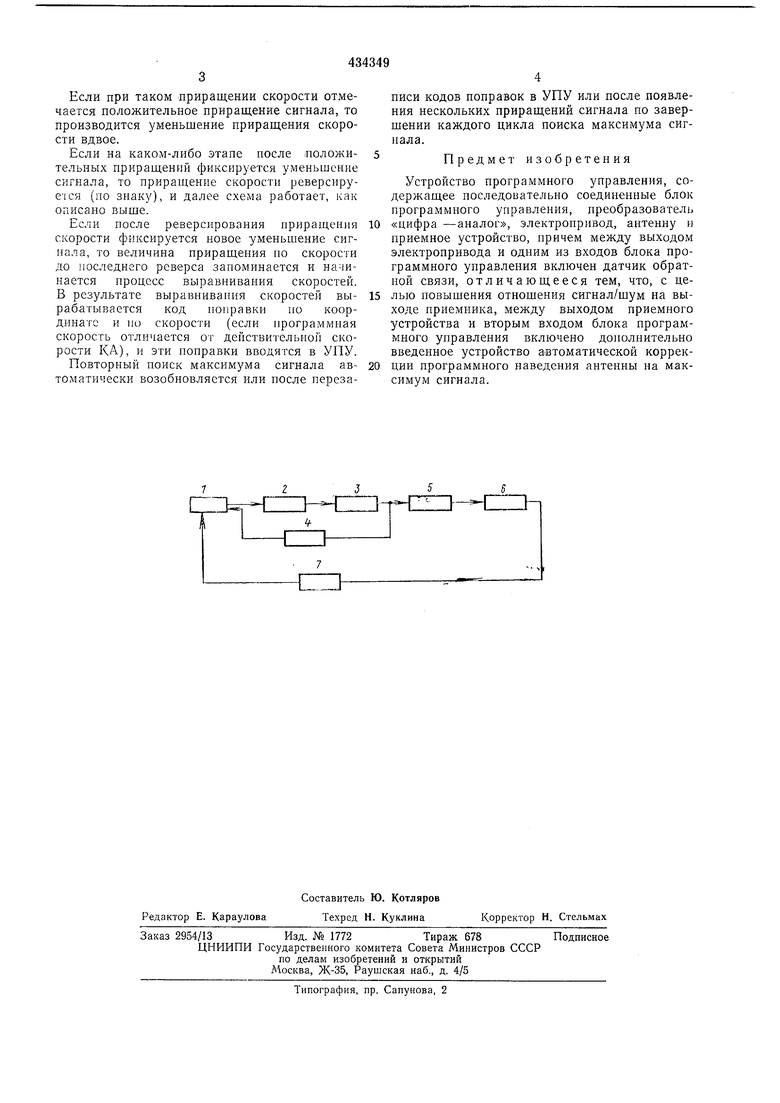
На чертеже приведена блок-схема предлагаемого устройства.
Схема состоит из олока 1 программного управлепия, содержащего устройства, обеспечивающие по даапыл целеуказаний программное наведение ацтсппы, и устройства фиксации и ввода поправок в программу, преобразователя «цифра - lianpHiKeiine 2, электропривода 3, датчика 4 обратно связи, антенны 5, приемника б, устройства 7 автоматической коррекции программного наведения антенны на максимум сигнала, принимаемого главным лепестком единственной и неподвижной относительно оси зеркала антенны диаграммой направленности.
ОсноБные операции по выработке корректирующих поправок, вводплгых в программные блоки, осуществляются в устройстве 7 автоматической коррекции программного наведения антепны. При этом устройство 7 работает следующим образом.
В начале любого цикла поиска устройство имеет некоторое лгаксимальное приращение скорости, суммируемое с программной скоростью.
Если при таком приращении скорости отмечается положительное приращение сигнала, то производится уменьшение приращения скорости вдвое.
Если на каком-либо этапе после положительных приращений фиксируется уменьшение сигнала, то приращение скорости реверсируеюя {по знаку), и далее схема работает, как описано выше.
Если после реверсирования приращения скорости фиксируется новое уменьшение сигмала, то величина приращения по скорости до последнего реверса запоминается и на шнается процесс выравнивания скоростей. В результате выравнивания скоростей вырабатывается код поправки по координате и по скорости (если программная скорость отличается от действительной скорости КА), и эти поправки вводятся в УПУ.
Повторный поиск максимума сигнала автоматически возобновляется или после перезаписи кодов поправок в УПУ или после появления нескольких приращений сигнала по завершении каждого цикла поиска максимума сигпала.
Предмет изобретения
Устройство программного управления, содержащее последовательно соединенные блок программного управления, преобразователь «цифра -аналог, электропривод, антенну и приемное устройство, причем между выходом электропривода и одним из входов блока программного управления включен датчик обратной связи, отличающееся тем, что, с целью повышения отношения сигнал/шум на выходе приемника, между выходом приемного устройства и вторым входом блока программного управления включено дополнительно введенное устройство а1втоматической коррекции программного наведения антенны на максимум сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СПОСОБ НАВЕДЕНИЯ АНТЕНН РЕТРАНСЛЯТОРА | 2006 |
|
RU2368076C2 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА | 2007 |
|
RU2328824C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ РАДИОТЕЛЕСКОПА | 2006 |
|
RU2319171C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЕДЕНИЕМ СНАЙПЕРСКОГО ОГНЯ | 2011 |
|
RU2474782C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2006 |
|
RU2308154C1 |
| СИСТЕМА ДОСТАВКИ ЭНЕРГИИ НА БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО | 2022 |
|
RU2829194C2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
