Предлагаемое изобретение относится к навигации и может быть использовано для определения взаимного положения подвижных объектов.
Известна система контроля положения подвижных объектов, в которой вдоль пути следования подвижного объекта развернута линия индуктивной радиосвязи, имеющая N (где N > 3) проводников с периодом повторения P, расположенных со сдвигом P/N. На каждый проводник подают N-фазный электрический ток с прямой или обратной последовательностью фаз. Две транспортные антенны подвижного объекта, расположенные на некотором расстоянии друг от друга вдоль линии радиосвязи, принимают от нее сигналы. По сдвигу фаз принимаемых сигналов определяют положение подвижного объекта. В системе линия радиосвязи разделена на небольшие интервалы, соответствующие интервалам, на которые разделен весь путь следования объекта. На каждом интервале периоды повторения отличаются [1].
Недостатком устройства является отсутствие возможности определения с высокой точностью взаимного положения объектов, а также невозможность использования на летающих и морских объектах.
Известное устройство определения положения подвижных объектов содержащее n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, аппаратуры потребителя (далее в материалах заявки называемой приемником спутниковых сигналов), вычислительного блока, модулятора, передатчика и передающей антенны, вычислителя параметра, соединенного со вторым входом вычислительного блока, К подвижных объектов, состоящих из последовательно соединенных первой приемной антенны, приемника спутниковых сигналов и корректора параметра (далее в материалах заявки называемого вычислительным блоком), выход которого соединен с информационным входом приемника спутниковых сигналов, последовательно соединенных второй приемной антенны, приемника и демодулятора, выход которого соединен со вторым входом вычислительного блока [2 рис. 20.3].
Недостатком данного устройства является отсутствие возможности определения с высокой точностью взаимного положения объектов.
Известен способ определения положения подвижных объектов, заключающийся в приеме на подвижном объекте и наземной контрольно-корректирующей станции сигналов от навигационных спутников, измерении на подвижном объекте и контрольно-корректирующей станции дальностей от соответствующих навигационных спутников, вычислении на контрольно-корректирующей станции поправок к измеряемым параметрам (например, к дальности) для всех радиовидимых навигационных спутников по разности между истинными дальностями и измеренными дальностями, излучении полученных поправок с контрольно-корректирующей станции, приеме на подвижном объекте сигналов, излученных контрольно-корректирующей станцией и определении координат и скорости подвижного объекта по измеренным дальностям, от соответствующих спутников и значениям поправок к ним [2 c. 238-288].
Данный способ обеспечивает определение координат и скорости подвижных объектов с высокой точностью в широкой зоне действия.
Недостатком описанного способа является отсутствие возможности определения с высокой точностью взаимного положения объектов.
В основу изобретения положена задача повышения точности определения взаимного положения объектов путем определения на одном объекте расстояния до другого объекта и ориентации одного объекта относительно другого объекта в пространстве.
Поставленная задача решается тем, что в способе определения взаимного перемещения объектов, заключающемся в приеме в одной контролируемой точке на первом и втором объектах сигналов от навигационных спутников, измерении на первом и втором объектах дальностей от соответствующих навигационных спутников до контролируемых точек, согласно изобретению по крайней мере в двух контролируемых точках первого объекта и по крайней мере в двух контролируемых точках второго объекта принимают сигналы от навигационных спутников, измеряют на первом и втором объектах по крайней мере в двух контролируемых точках навигационные параметры от соответствующих спутников, на первом объекте переизлучают, полученные навигационные параметры и величину расстояния между контролируемыми точками на первом объекте, принимают, на втором объекте сигналы, излученные первым объектом, и определяют на втором объекте взаимное перемещение объектов по расстояниям, полученным между соответствующими навигационными спутниками и по крайней мере двумя контролируемыми точками на первом и втором объектах, а также по известным расстояниям между контролируемыми точками на первом и втором объектах.
Преимущества предлагаемого технического решения заключается в повышении точности определения взаимного положения объектов за счет определения навигационных параметров по крайней мере в двух контролируемых точках на первом и втором объектах. К навигационным параметрам относятся измеренные временные задержки и фазы несущих частот по каждому спутнику 71-7n.
Изобретение поясняется описанием конкретных примеров его осуществления и прилагаемыми чертежами, на которых:
фиг. 1 - изображает структурную схему системы определения взаимного перемещения объектов;
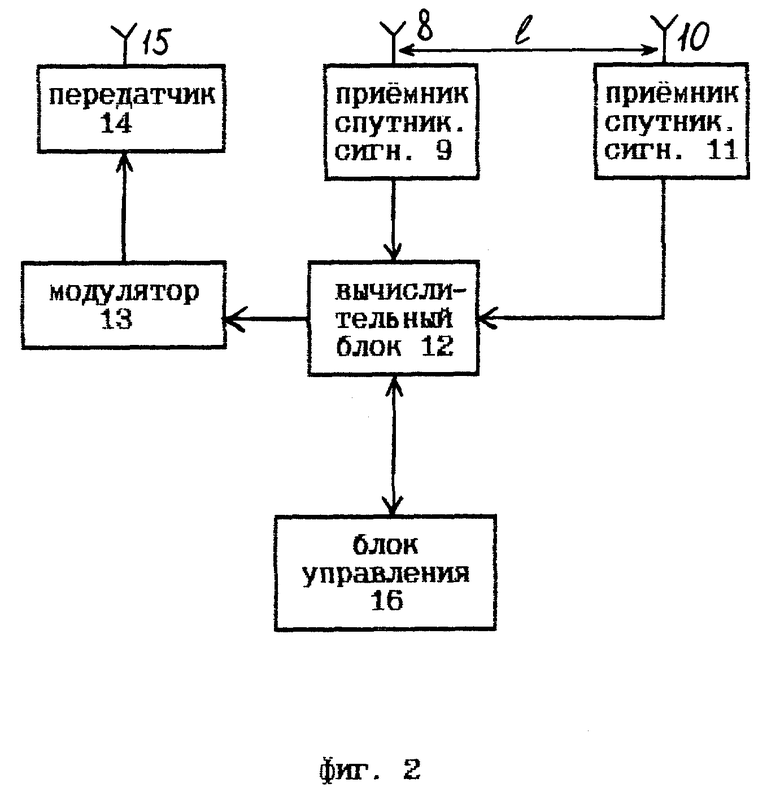
фиг. 2 - схему аппаратуры, устанавливаемой на первом объекте;
фиг. 3 - вариант схемы аппаратуры, устанавливаемой на втором объекте;
фиг. 4 - схему варианта вычислительного блока;
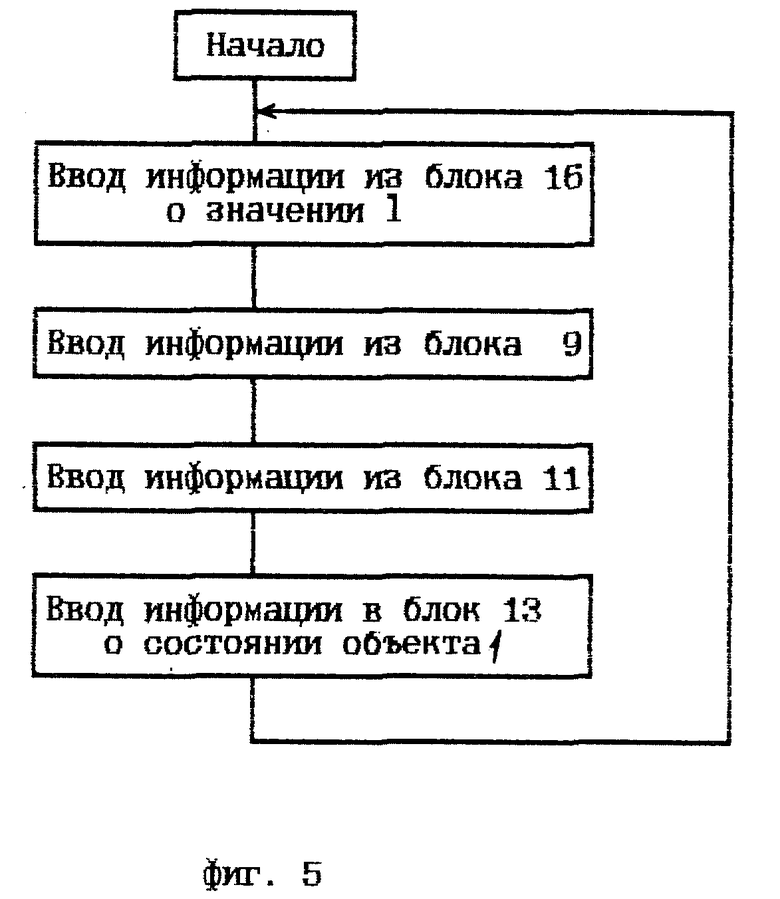
фиг. 5 - блок-схема алгоритма вычислительного блока аппаратуры первого объекта;
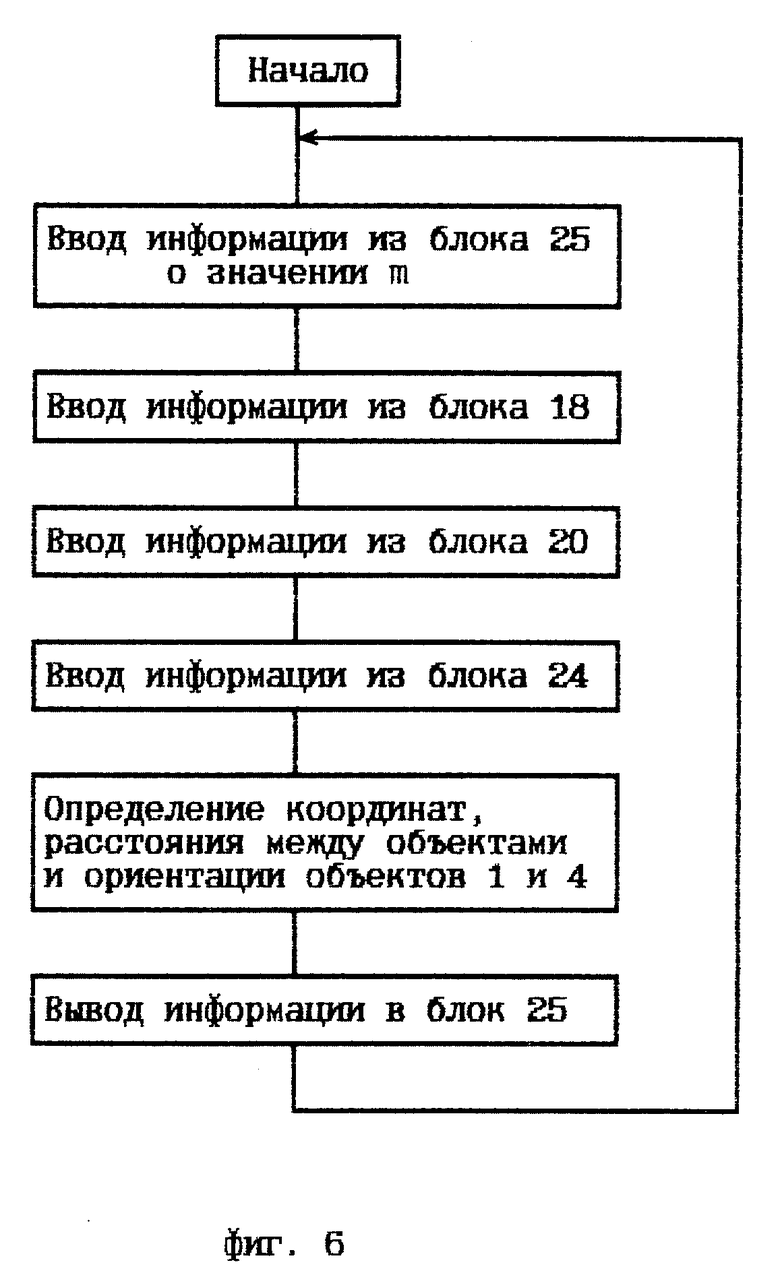
фиг. 6 - блок-схема алгоритма вычислительного блока аппаратуры второго объекта. Выполнение способа может быть реализовано системой, которая (фиг. 1) содержит первый объект 1 с контролируемыми точками 2, 3, второй объект 3 с контролируемыми точками 5, 6, навигационные спутники 71, 72...7n. Аппаратура, функционирующая на первом объекте 1 (фиг. 2), содержит первую приемную антенну 8, соединенную с первым приемником спутниковых сигналов 9, вторую приемную антенну 10, соединенную со вторым приемником спутниковых сигналов 11, выходы приемников 9 и 11 соединены со входами вычислительного блока 12, выход которого соединен с последовательно соединенными модуляторами 13, передатчиком 14 и передающей антенной 15, блок управления 16, соединенный с вычислительным блоком 12. Аппаратура, функционирующая на втором объекте 4 (фиг. 3), содержит первую приемную антенну 17, соединенную с первым приемником спутниковых сигналов 18, вторую приемную антенну 19, соединенную со вторым приемником спутниковых сигналов 20, выходы приемников 18 и 20 соединены со входами вычислительного блока 21, последовательно соединенные третью приемную антенну 22, приемник 23 и демодулятор 24, выход которого соединен со входом вычислительного блока 21, блок управления 25, соединенный с вычислительным блоком 21.
Способ осуществляется следующим образом. На объектах 1 и 4 в контролируемых точках 2, 3 и 5, 6 соответственно принимают одновременно сигналы от навигационных спутников 71-7n, например, системы "НАВСТАР".
Измеряют на объектах 1 и 4 навигационные параметры соответствующих навигационных спутников 71-7n до контролируемых точек 2, 3 и 5, 6 объектов 1 и 4 (r21, r22, . ..r2n; r31,...r32,...r3n и r51, r52,...r5n; r61, r62,...r6n), которые переизлучают в пространство с первого объекта 1. На втором объекте 4 принимают сигналы излученные с первого объекта 1. Затем на втором объекте 4 определяют взаимное перемещение объектов 1 и 4 по расстояниям, полученным между соответствующими навигационными спутниками 71-7n до контролируемых точек 2, 3 и 5, 6 объектов 1, 4 и известным расстоянием между контролируемыми точками на первом 1 и втором 4 объектах (l и m на фиг. 1).
Система контроля взаимного перемещения объектов работает следующим образом. На первом объекте 1 (фиг. 2) антеннами 8 и 10 принимаются сигналы от навигационных спутников 71-7n, которые обрабатываются в приемниках спутниковых сигналов 9 и 11 соответственно. С выхода приемников 9, 11 сигналы, в которых содержится информация о времени приема навигационного сигнала, измеренных навигационных параметров от соответствующих навигационных спутников 71-7n (например, для второй контролируемой точки r21, r22,...r2n; для третьей контролируемой точки r31, r32,...r3n) поступают на вычислительный блок 12.
В вычислительном блоке 12 по измеренным параметрам и расстоянию между антеннами 8 и 10 определяются координаты и ориентация первого объекта 1 в пространстве, которые выводятся в блок управлении 16 для индикации. С выхода блока управления 16 в вычислительный блок 12 вводится информация о расстоянии между контролируемыми точками 2 и 3 первого объекта 1, в которых устанавливаются приемные антенны 8 и 10 соответственно. Кроме того, информация от вычислительного блока 12 поступает на модулятор 13. В передатчике 14 преобразуются, усиливаются и антенной 15 излучаются сигналы, содержащие навигационную информацию, полученную в точках 2 и 3 от навигационных спутников 71-7n и расстояние между точками 2 и 3. На объекте 4 принимаются антенной 22, усиливаются и преобразуются в приемнике 23, а затем выделяются на выходе демодулятора 24 сигналы, в которых содержится информация о расстоянии между точками 2 и 3, времени приема навигационных сигналов, измеренных информационных параметрах от соответствующих навигационных спутников 71-7n до контролируемых точек 2 и 3 первого объекта 1. Данная информация вводится в вычислительный блок 21. На втором объекте 4 в контролируемых точках 5 и 6 (фиг. 3) антеннами 17 и 19 принимаются сигналы от навигационных спутников 71-7n, которые обрабатываются в приемниках спутниковых сигналов 18 и 20 соответственно. С выходов приемников 18 и 20 сигналы, в которых содержится информация о времени приема навигационных сигналов, измеренных навигационных параметрах от соответствующих навигационных спутников 71-5n поступают на вычислительный блок 21. С выхода блока управления 25 в вычислительный блок 21 вводится информация о расстоянии между контролируемыми точками 5 и 6 второго объекта 4, в которых устанавливаются приемные антенны 17 и 19 соответственно. В вычислительном блоке 21 по информации, полученной с выходов блоков 18, 20, 24 определяются координаты, скорости объектов 1 и 4, расстояние между объектами и ориентация объекта 1 относительно объекта 4 в пространстве, которые выводятся в блок управления 25 для индикации. Затем цикл работы системы повторяется. Алгоритмы расчета положения точек 2, 3 и 5, 6 приведены, например, в [3 на с. 62-64], в [2 на с. 220-223]. Алгоритмы расчета положения точек 2, 3 относительно точек 5 и 6 с высокой точностью на основании информации, полученной на объекте 4 относительно объекта 1, приведены, например, в [2 на с. 285-288]. Алгоритмы расчета пространственной ориентации объекта на основании информации, полученной в точках 2, 3 и 5, 6, приведены, например, в [2 на с. 206, 207]. Вычислительный блок 12, 21 может быть реализован как на элементах "жесткой" (непрограммируемой) логики, так и на основе микропроцессора по типовой структуре, описанной, например, в [4 на с. 203].
Структурная схема варианта вычислительного блока 12, 21 приведена на фиг. 4. Дешифратор 29 обеспечивает выбор постоянного 27 или оперативного 28 запоминающих элементов, в которых хранятся программы, константы или текущая информация соответственно. Микропроцессорный модуль 26 выполняет обработку и обмен информацией в соответствии с блок-схемой (фиг. 5, 6) и связан с блоками 27, 29 шиной адреса (ША) и информационной шиной данных (ШД), может иметь управляющие выходы с сигналами "чтение" и "запись" для управления постоянным 27 и оперативным 28 запоминающими элементами соответственно, "вывод", например, для вывода информации по шине ШД в блок 13, вход "запрос прерывания" для ввода информации в микропроцессорный модуль 26, например, от блоков 9, 11, 16.
При реализации вычислительного блока 12, 21 на базе микропроцессора К580 микропроцессорный модуль 26 состоит из трех БИС - центрального процессора К580ИК80, системного контроллера К580ВК88, тактового генератора К580ГФ24.
Приемники спутниковых сигналов 9, 11, 18, 20 могут быть выполнены в соответствии с рис. 1.14 /5/, рис. 38 /3/, рис. 9.5 /2/, реализации отдельных блоков аппаратуры, расположенной на объектах 1 и 4, описаны, например, в /2, 3, 5/.
Длительность цикла работы системы выбирается таким образом, чтобы успевали выполняться прием, измерения, передача навигационной и измерительной информации.
Рассмотрим пример при реализации указанного способа. Так, для спутниковых радионавигационных систем "НАВСТАР" и "ГЛОНАСС", работающих в диапазоне частот 1,5 гГц, длина волны составляет Л = 20 см. При этом на практике можно реализовать приемники спутниковых сигналов 9, 11, 18, 20 с погрешностью измерения фазы принятого сигнала от навигационного спутника порядка единиц градусов. Тогда при измерении расстояний от спутников 71-7n до контролируемых точек 2, 3 и 5, 6 с использованием информации о фазе принятых от спутников сигналов можно обеспечить погрешность измерения расстояний порядка единиц миллиметров, при этом погрешность определения ориентации осей объектов составляет единицы угловых минут при расстоянии между контролируемыми точками объектов (l и m) в несколько метров. Тогда на втором объекте 4 можно определять координаты первого объекта и расстояние между объектами 1 и 4 с погрешностью в единицы миллиметров, а также ориентацию (азимут, крен, дифферент) первого объекта 1 относительно объекта 4 с погрешностью в единицы угловых минут.
Таким образом, в предлагаемом изобретении повышается точность определения взаимного положения объектов путем определения на втором объекте координат, скорости и ориентации первого объекта относительно второго объекта, а также определения расстояния между объектами. В этом заключается технико-экономический эффект.
Источники информации.
1. Заявка Японии N 62-44226.
2. Сетевые спутниковые радионавигационные системы. Под ред. В.С. Шебшаевича, 2-е изд., перераб. и доп. - М.: Радио и связь, 1993.
3. Бортовые устройства спутниковой радионавигации /Под ред. В.С. Шебшаевича. - М.: Транспорт, 1988.
4. Балашов Е.П., Пузенков Д.В. Микропроцессоры и микропроцессорные системы. - М.: Радио и связь, 1990.
5. Цифровые радиоприемные системы. / Под ред. Жодзишского. - М.: Радио и связь, 1990.


Предназначен для использования с целью контроля взаимного положения подвижных объектов. Технический результат - повышение точности определения взаимного перемещения объектов. Способ осуществляется следующим образом: по крайней мере в двух контролируемых точках на первом и втором объектах принимают сигналы от навигационных спутников, измеряют на первом и втором объектах по крайней мере в двух контролируемых точках навигационные параметры от соответствующих спутников, на первом объекте переизлучают полученные навигационные параметры и величину расстояния между контролируемыми точками на первом объекте, принимают на втором объекте сигналы, излученные первым объектом, и определяют на втором объекте взаимное перемещение объектов по расстояниям, полученным между соответствующими навигационными спутниками и по крайней мере двумя контролируемыми точками на первом и втором объектах, а также по известным расстояниям между контролируемыми точками на первом и втором объектах. 6 ил.
Способ определения взаимного перемещения объектов, заключающийся в приеме в одной контролируемой точке на первом и втором объектах сигналов от навигационных спутников, измерении на первом и втором объектах дальностей от соответствующих навигационных спутников до контролируемых точек, отличающийся тем, что по крайней мере в двух контролируемых точках первого объекта и по крайней мере в двух контролируемых точках второго объекта принимают сигналы от навигационных спутников, измеряют на первом и втором объектах по крайней мере в двух контролируемых точках навигационные параметры от соответствующих спутников, на первом объекте переизлучают полученные навигационные параметры и величину расстояния между контролируемыми точками на первом объекте, принимают на втором объекте сигналы, излученные первым объектом, и определяют на втором объекте взаимное перемещение объектов по расстояниям, полученным между соответствующими навигационными спутниками и по крайней мере двумя контролируемыми точками на первом и втором объектах, а также по известным расстояниям между контролируемыми точками на первом и втором объектах.
| Сетевые спутниковые радионавигационные системы | |||
| /Под ред | |||
| В.С.Шебцаевича | |||
| - М.: Радио и связь, 1993, с.238-288 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1992 |
|
RU2042144C1 |
| УСТРОЙСТВО ОБРАБОТКИ НАВИГАЦИОННОЙ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2012896C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ КООРДИНАТ ДВУХ ОБЪЕКТОВ | 1990 |
|
RU1748516C |
| US 3495260 A, 10.02.70 | |||
| US 4161730 A, 17.07.79 | |||
| DE 1591518 A, 23.04.70 | |||
| DE 3305478 A, 15.09.83. | |||

