Устройство относится к технике железнодорожного транспорта, в частности к устройствам оповещения ремонтных бригад.
Известно устройство для оповещения о приближении поезда, содержащее приемник, соединенный с рельсами и подключенный к блоку обработки сигнала, элемент НЕ и блок сигнализации. Принцип действия этого устройства основан на улавливании приемником упругих акустических колебаний, которые создаются при проезде колеса через стыки как динамические удары [1].
Недостатками данного устройства является возможность приема ложного сигнала в форме упругих акустических колебаний и невысокая точность определения расстояния до поезда.
Известно устройство оповещения ремонтных бригад на пути о приближении поезда, содержащее путевые реле, шифратор, генератор тональной частоты, выход которого через линию связи связан с входом установленного на месте работ приемного блока и блока оповестительной сигнализации [2].
Недостатком данного устройства является низкая надежность из-за возможности повреждения линии связи.
Известно устройство автоматической сигнализации о приближении поезда к участку, где проводятся путевые работы, содержащее установленные на участке проведения работ лазерный генератор и приемник отраженного сигнала, включающий в себя фотоэлемент и фильтр, связанный с исполнительными элементами сигнализации, подключенными к управляемому источнику питания, соединенному с блоком изменения режимов сигнализации, и установленные в зоне контроля приближения поезда отражатели [3].
Недостатком данного устройства оповещения является невозможность применения на участках, на которых безопасная зона для ремонтной бригады не находится в зоне прямой видимости для данного устройства.
Известен способ контроля положения подвижных объектов, например подвижных железнодорожных составов, и система для его осуществления (варианты) [4]. Способ может быть реализован с помощью системы, которая содержит диспетчерский пункт, К подвижных объектов, n навигационных спутников. Аппаратура, функционирующая на диспетчерском пункте, содержит первую приемную антенну, соединенную с приемником спутниковых сигналов, последовательно соединенные вторую приемную антенну, приемник, демодулятор, вычислительный блок, модулятор, передатчик и передающую антенну, блок управления, соединенный с вычислительным блоком, соединенным с выходом приемника спутниковых сигналов. Аппаратура, функционирующая на каждом из К подвижных объектов, содержит первую приемную антенну, соединенную с приемником спутниковых сигналов, последовательно соединенные вторую приемную антенну, приемник, демодулятор, вычислительный блок, модулятор, передатчик и передающую антенну, блок управления, соединенный с вычислительным блоком, вход которого соединен с выходом приемника спутниковых сигналов, а выход - с входом управления приемника спутниковых сигналов.
Недостатком данного устройства является невозможность применения для оповещения ремонтных бригад.
В основу изобретения положена задача создать такое устройство, которое обеспечивало бы оповещение ремонтных бригад о приближении подвижного состава.
Поставленная задача решается тем, что устройство оповещения ремонтных бригад, содержащее n навигационных спутников, диспетчерский пункт, состоящий из последовательно соединенных приемной антенны, приемника спутниковых сигналов, вычислительного блока, модулятора, передатчика и передающей антенны, вычислителя параметра, соединенного со вторым входом вычислительного блока, подвижной объект, состоящий из последовательно соединенных приемной антенны спутниковых сигналов, приемника спутниковых сигналов и вычислительного блока, последовательно соединенных первой приемной антенны, первого приемника и первого демодулятора, выход которого соединен со вторым входом вычислительного блока, блока сопряжения, вход которого соединен с первым выходом вычислительного блока, а выход блока сопряжения соединен с системой управления локомотивом, согласно изобретению дополнительно содержит в подвижном объекте последовательно соединенные модулятор, подключенный ко второму выходу вычислительного блока, передатчик и передающую антенну, последовательно соединенные вторую приемную антенну, второй приемник и второй демодулятор, выход которого соединен с третьим входом вычислительного блока, устройство сигнализации, содержащее последовательно соединенные приемную антенну, приемник, демодулятор, вычислительный блок, модулятор, передатчик и передающую антенну, последовательно соединенные приемную антенну спутниковых сигналов и приемник спутниковых сигналов, выход которого соединен со вторым входом вычислительного блока, блок управления, соединенный с вычислительным блоком.
Устройство поясняется прилагаемыми чертежами, на которых представлены: фиг.1 - структурная схема устройства оповещения ремонтных бригад; фиг.2 - блок-схема алгоритма вычислительного блока подвижного объекта; фиг.3 - блок-схема алгоритма вычислительного блока устройства сигнализации; фиг.4 - структурная схема упрощенного варианта устройства оповещения ремонтных бригад; фиг.5 - блок-схема алгоритма вычислительного блока упрощенного варианта устройства сигнализации; фиг.6 - схема варианта вычислительного блока.
Устройство оповещения ремонтных бригад (фиг.1) содержит n навигационных спутников l1,l2,...,ln, диспетчерский пункт 2, содержащий последовательно соединенные приемную антенну 3 спутниковых сигналов, приемник 4 спутниковых сигналов, вычислительный блок 5, модулятор 6, передатчик 7 и передающую антенну 8, а также вычислитель параметра 9, выходом соединенный с вычислительным блоком 5, подвижный объект 10, включающий последовательно соединенные приемную антенну 11 спутниковых сигналов, приемник 12 спутниковых сигналов, вычислительный блок 13 и блок сопряжения 14, последовательно соединенные первую приемную антенну 15, первый приемник 16 и первый демодулятор 17, выход которого соединен с вторым входом вычислительного блока 13, последовательно соединенные модулятор 18, вход которого соединен со вторым выходом вычислительного блока 13, передатчик 19 и передающую антенну 20, последовательно соединенные вторую приемную антенну 21, второй приемник 22 и второй демодулятор 23, выход которого подключен к третьему входу вычислительного блока 13, и устройство сигнализации 24, содержащее последовательно соединенные приемную антенну 25, приемник 26, демодулятор 27, вычислительный блок 28, модулятор 29, передатчик 30 и передающую антенну 31, блок управления 32, соединенный с вычислительным блоком 28, а также последовательно соединенные приемную антенну 33 спутниковых сигналов, приемник 34 спутниковых сигналов, соединенный со вторым входом вычислительного блока 28.
Принцип действия данного устройства заключается в следующем.
Диспетчерский пункт 2 (фиг.1) антенной 3 принимает сигналы навигационных спутников l1-ln, определяет радионавигационные параметры  по каждому из спутников. С приемника спутниковых сигналов 4 измеренные значения радионавигационных параметров поступают на вход вычислительного блока 5, второй вход которого соединен с вычислителем параметра 9, определяющим эталонные значения радионавигационных параметров R1(3)-Rn(3) на основе эталонных координат фазового центра антенны 3, ХКСЭ, YКСЭ, ZКСЭ, эфемерид Хэф1-Хэфn, Yэф1-Yэфn, Zэф1-Zэфn каждого из спутников l1-ln.
по каждому из спутников. С приемника спутниковых сигналов 4 измеренные значения радионавигационных параметров поступают на вход вычислительного блока 5, второй вход которого соединен с вычислителем параметра 9, определяющим эталонные значения радионавигационных параметров R1(3)-Rn(3) на основе эталонных координат фазового центра антенны 3, ХКСЭ, YКСЭ, ZКСЭ, эфемерид Хэф1-Хэфn, Yэф1-Yэфn, Zэф1-Zэфn каждого из спутников l1-ln.
Вычислительный блок 5 вырабатывает значения поправок радионавигационных параметров по каждому из спутников в соответствии с алгоритмом [5, стр.288]:

где i=1,...,n - текущий номер спутника.
С выхода вычислительного блока 5 сигналы, в которых содержится информация о номере спутника, времени приема навигационного сигнала, поправках к радионавигационным параметрам до каждого спутника ΔR1-ΔRn, поступают на модулятор 6. С выхода модулятора 6 сигналы поступают на передатчик 7, где преобразуются, усиливаются и излучаются в пространство антенной 8.
Одновременно сигналы навигационных спутников l1-ln принимаются антенной 11, подключенной к входу приемника 12 спутниковых сигналов, производящего определение радионавигационных параметров  . С выхода приемника 12 спутниковых сигналов информация о номерах спутников, времени приема сигналов и значениях радионавигационных параметров поступает в вычислительный блок 13.
. С выхода приемника 12 спутниковых сигналов информация о номерах спутников, времени приема сигналов и значениях радионавигационных параметров поступает в вычислительный блок 13.
Сигналы диспетчерского пункта 2 принимаются антенной 15 подвижного объекта 10, поступают на вход первого приемника 16, в котором происходит усиление, преобразование и выделение сигналов диспетчерского пункта 2. С выхода приемника 16 сигналы поступают на вход первого демодулятора 17, выделяющего из сигналов информацию о номере спутника, времени приема сигнала и поправках радионавигационных параметров ΔR1-ΔRn, сформированных вычислительным блоком 5 диспетчерского пункта 2.
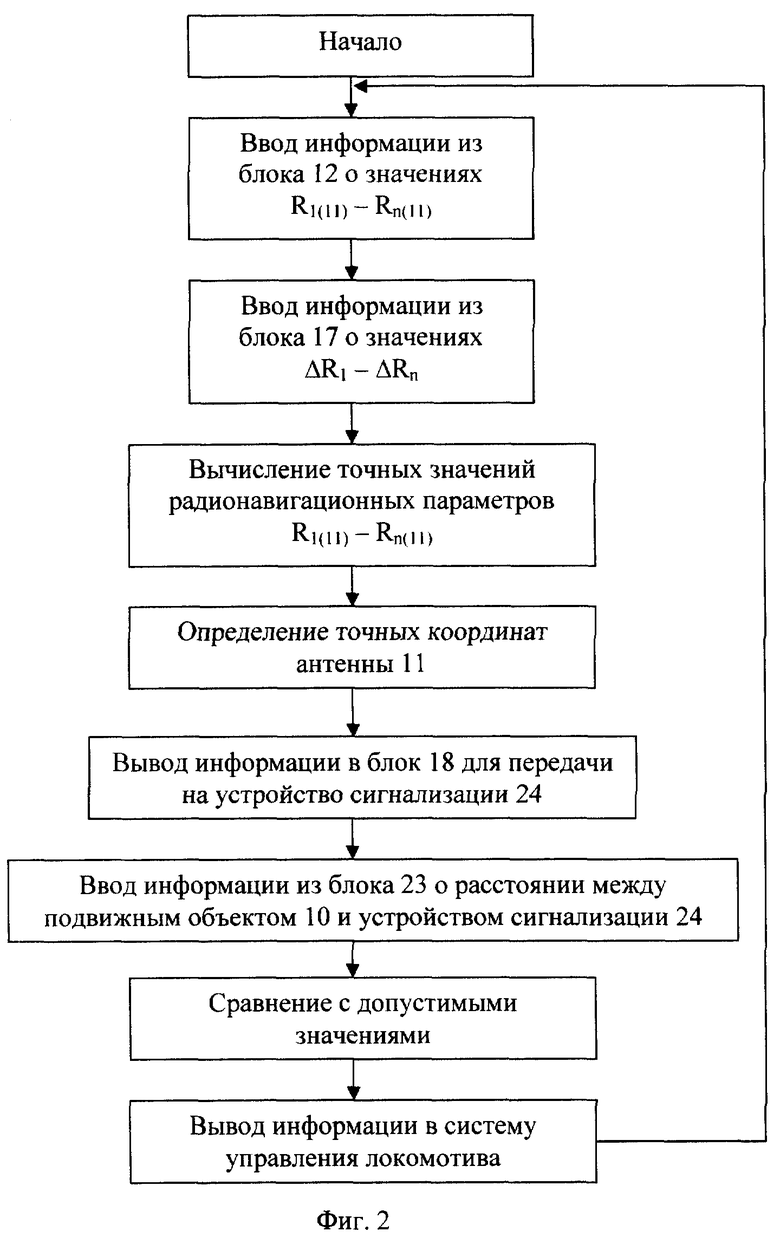
Вычислительный блок 13 выполняет циклическую обработку вводимой информации в соответствии с блок-схемой алгоритма, приведенной на фиг.2.
После ввода информации из блоков 17 и 12 вычислительный блок 13 выполняет коррекцию радионавигационных параметров  , измеренных приемником 12 спутниковых сигналов в соответствии с [5, стр.288]:
, измеренных приемником 12 спутниковых сигналов в соответствии с [5, стр.288]:

В результате этой коррекции получают точные значения радионавигационных параметров R1(11)-Rn(11), которые используют для вычисления точных координат антенны 11. В случае использования в качестве радионавигационных параметров результатов измерений псевдодальностей для определения координат антенны может быть использован алгоритм, приведенный, например в [5, стр.230-231].
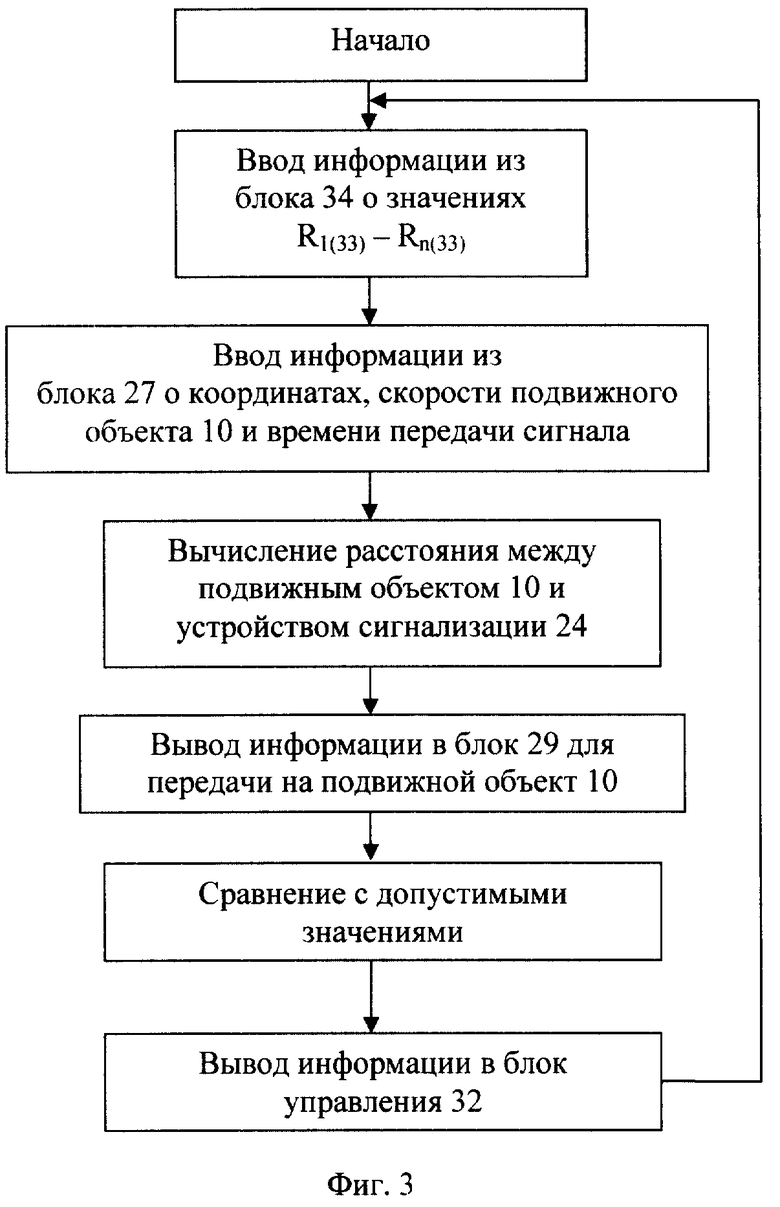
Точные значения координат подвижного объекта 10 поступают в блок сопряжения 14 и затем подаются в систему управления локомотивом, а также поступают через модулятор 18 в передатчик 19, где преобразуются, усиливаются и излучаются в пространство передающей антенной 20. Сигнал, излученный передающей антенной 20, принимается антенной 25 устройства сигнализации 24 и поступает на вход приемника 26. После усиления и преобразования сигнала в приемнике 26 в демодуляторе 27 выделяется информация о координатах, скорости локомотива и времени передачи сигнала. Одновременно сигналы навигационных спутников l1-ln принимаются антенной 33, подключенной к входу приемника спутниковых сигналов 34, производящего определение радионавигационных параметров  . С выхода приемника спутниковых сигналов 34 информация о номерах спутников, времени приема сигналов и значениях радионавигационных параметров поступает в вычислительный блок 28. Координаты местоположения устройства сигнализации 24 вычисляются в вычислительном блоке 28, где также по известным координатам подвижного объекта 10 вычисляется расстояние между подвижным объектом 10 и устройством сигнализации 24. Результат вычисления выдается на индикатор блока управления 32. На индикатор выдается информация о расчетном времени прибытия подвижного объекта 10 к месту ремонтных работ при известных скорости подвижного объекта 10, расстоянии от подвижного объекта 10 до критической точки сближения, которая определяется по известным параметрам. При совпадении результатов расчетов и критических значений, записанных в вычислительный блок 28, блок управления 32 сигнализирует об опасности, например, звуковым сообщением, записанным в блок управления 32, поскольку после критической точки сближения появляется опасность для жизни рабочих.
. С выхода приемника спутниковых сигналов 34 информация о номерах спутников, времени приема сигналов и значениях радионавигационных параметров поступает в вычислительный блок 28. Координаты местоположения устройства сигнализации 24 вычисляются в вычислительном блоке 28, где также по известным координатам подвижного объекта 10 вычисляется расстояние между подвижным объектом 10 и устройством сигнализации 24. Результат вычисления выдается на индикатор блока управления 32. На индикатор выдается информация о расчетном времени прибытия подвижного объекта 10 к месту ремонтных работ при известных скорости подвижного объекта 10, расстоянии от подвижного объекта 10 до критической точки сближения, которая определяется по известным параметрам. При совпадении результатов расчетов и критических значений, записанных в вычислительный блок 28, блок управления 32 сигнализирует об опасности, например, звуковым сообщением, записанным в блок управления 32, поскольку после критической точки сближения появляется опасность для жизни рабочих.
Информация с вычислительного блока 28 о координатах устройства сигнализации 24, расчетном времени прибытия подвижного объекта 10 к месту ремонтных работ при известной скорости подвижного объекта 10, расстоянии от подвижного объекта 10 до критической точки сближения, проходя через модулятор 29, преобразуется и усиливается в передатчике 30 и излучается в пространство передающей антенной 31. Сигнал, излученный антенной 31, принимается антенной 21 подвижного объекта 10, усиливается и преобразуется во втором приемнике 22. Информация, выделенная из сигнала вторым демодулятором 23, поступает в вычислительный блок 13. В вычислительном блоке 13 информация о расчетном времени прибытия подвижного объекта 10 к месту ремонтных работ при известной скорости локомотива, координатах устройства сигнализации 24 сравнивается с допустимыми значениями и при превышении их через блок сопряжения 14 поступает в систему управления локомотивом и выдает сообщение о ситуации на пути следования локомотива. Аппаратура подвижного объекта 10 устанавливается на локомотиве, аппаратура устройства сигнализации 24 находится у бригадира ремонтной бригады.
Вычислительный блок 28 выполняет циклическую обработку вводимой информации в соответствии с блок-схемой алгоритма, приведенной на фиг.3.
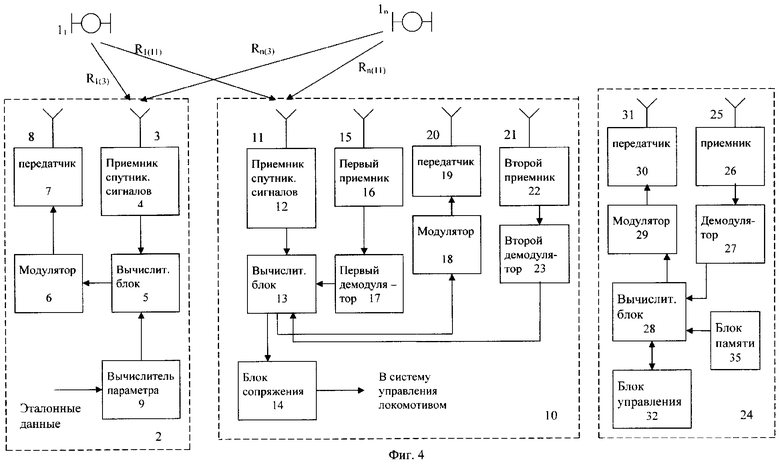
Возможен вариант устройства оповещения ремонтных бригад (фиг.4), который характеризуется простотой реализации устройства сигнализации 24. При этом устройство сигнализации 24 содержит последовательно соединенные приемную антенну 25, приемник 26, демодулятор 27, вычислительный блок 28, модулятор 29, передатчик 30 и передающую антенну 31, блок памяти 35, выход которого соединен со вторым входом вычислительного блока 28, блок управления 32, соединенный также с вычислительным блоком 28. Отличительной особенностью упрощенного варианта является отсутствие приемной антенны 33 и приемника спутниковых сигналов 34 в устройстве сигнализации 24. Координаты местоположения ремонтной бригады записываются перед началом работы в блок памяти 35. Работает данный вариант устройства оповещения ремонтных бригад аналогичным образом, как описано на фиг.1.
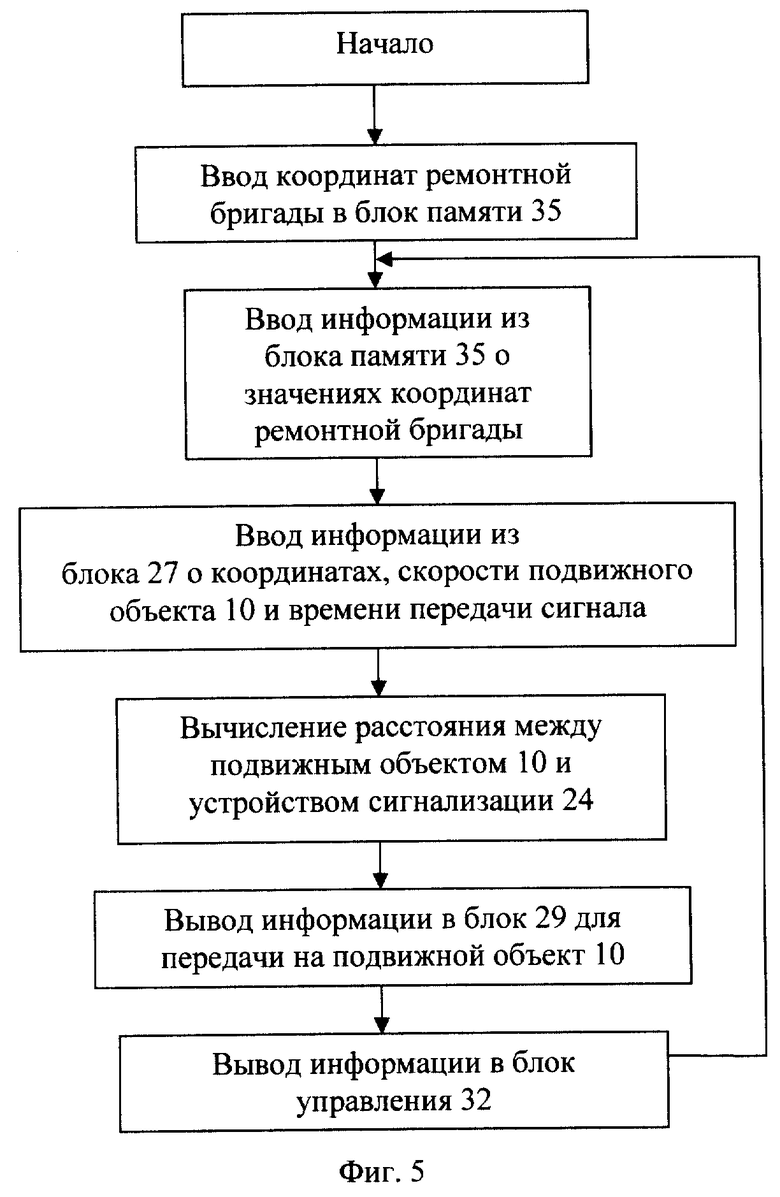
Сигнал о координатах, скорости локомотива и времени передачи сигнала, излученный передающей антенной 20 на подвижном объекте 10, принимается антенной 25 и поступает на вход приемника 26. После усиления и преобразования сигнала в приемнике 26 в демодуляторе 27 выделяются координаты, скорость локомотива и время передачи сигнала и поступают в вычислительный блок 28. В вычислительном блоке 28 вычисляется расстояние между локомотивом и ремонтной бригадой. Полученные результаты выдаются в блок управления 32 и поступают на индикацию, а также, проходя через модулятор 29 и передатчик 30, излучаются в пространство антенной 31. Излученные сигналы на подвижном объекте 10 принимаются антенной 21 и подаются в вычислительный блок 13. Данная информация обрабатывается в вычислительном блоке 13 и в блок сопряжения 14 выдается сообщение о ситуации на пути следования локомотива.
Вычислительный блок 28 в данном варианте выполняет циклическую обработку вводимой информации в соответствии с блок-схемой алгоритма, приведенной на фиг.5.
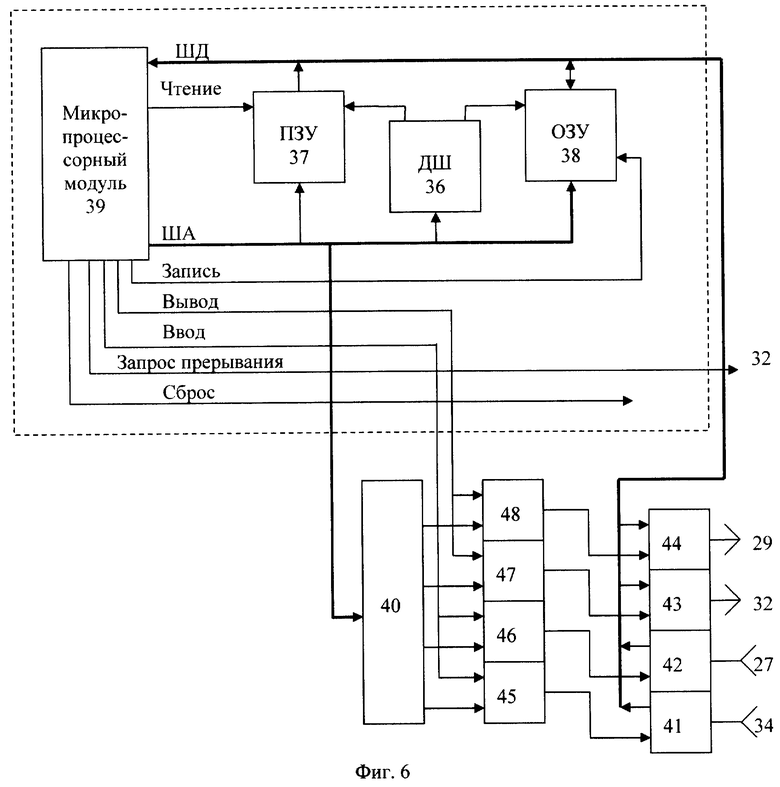
Вычислительный блок 28, 13 может быть реализован как на элементах "жесткой" (непрограммируемой) логики, так и на основе микропроцессора по типовой структуре, описанной, например, в [6, стр.203].
Структурная схема варианта вычислительного блока 28, 13 приведена на фиг.6. Дешифратор 36 обеспечивает выбор постоянного 37 или оперативного 38 запоминающих элементов, в которых хранятся программы, константы или текущая информация соответственно. Микропроцессорный модуль 39 выполняет обработку и обмен информацией в соответствии с блок-схемой (фиг.3) и связан с блоками 36-38, 40 шиной адреса (ША) и информационной шиной (ШД) с блоками 37, 38, 41-44, может иметь управляющие выходы с сигналами "чтение" и "запись" для управления постоянным 37 и оперативным 38 запоминающими элементами соответственно, "вывод" - например, для вывода информации по шине ШД в блоки 29, 32, "ввод" - для ввода информации в микропроцессорный модуль 39 по шине ШД от блоков 27, 34, вход "запрос прерывания" для ввода информации в микропроцессорный модуль 39 от блоков 32. Сигналы обращения (ввода) со стороны внешних блоков 27, 32 - к вычислительному блоку 28 и сигналы обращения (вывода) со стороны вычислительного блока 28 - к внешним блокам 29, 32 формируется путем дешифрирования кода адреса соответствующего регистра в дешифраторе 40 и конъюнкции его входящих сигналов с сигналом "ввод" в элементах И 45-46 и с сигналом "вывод" в элементах И 47-48. По выходным сигналам элементов И 45-46 производится запись информации из внешних блоков 27, 34 в регистры 41-42. По выходным сигналам элементов И 47-48 производится запись информации из микропроцессорного модуля 39 в регистры 43-44.
При реализации вычислительного блока 28, 13 на базе микропроцессора К580 микропроцессорный модуль 39 состоит из трех интегральных схем - центрального процессора К 580 ИК 80, системного контроллера К 580 ВК 88, тактового генератора К 580 ГФ 24.
Таким образом, использование данного устройства оповещения ремонтных бригад позволяет определить местоположение поезда относительно ремонтной бригады с меньшей погрешностью по сравнению с известными устройствами (погрешность составляет 20-30 м [5]) и, следовательно, повысить безопасность работы ремонтных бригад в широкой зоне работ.
Литература
1. АС №1066868 СССР. Устройство для оповещения о приближении поезда. / Опубл. 1984, бюл. №2.
2. АС №1220998 СССР. Устройство оповещения ремонтных бригад на пути о приближении поезда. / Пивоварчик Н.И., Тарасов Ю.И. и др. Опубл. 1986, бюл. №12.
3. АС №914383 СССР. Устройство автоматической сигнализации о приближении поезда к участку с путевыми работами. / Левин Б.А., Шевандин М.А. Опубл. 1982, бюл. №11.
4. Патент РФ №2115140. Способ контроля положения подвижных объектов, например подвижных железнодорожных составов, и система для его осуществления (варианты). / Васекин А.И., Кокорин В.И., Чмых М.Х. и др. Опубл. 1998, бюл. №19.
5. Сетевые спутниковые радионавигационные системы./ Под ред. B.C.Шебшаевича. 2-е изд., перераб. и доп. - М.: Радио и связь, 1993, с 283-288.
6. Балашов Е.П., Пузенков Д.В. Микропроцессоры и микропроцессорные системы. - М.: Радио и связь, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2001 |
|
RU2219084C2 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2115140C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА ИЛИ ЛОКОМОТИВА С ПРИБЫВАЮЩИМ ИЛИ ОТПРАВЛЯЮЩИМСЯ СО СТАНЦИИ ПОЕЗДОМ | 2004 |
|
RU2288856C2 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2004 |
|
RU2265543C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НАДВОДНОГО ОБЪЕКТА | 1999 |
|
RU2152049C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381518C2 |
| НАВИГАЦИОННОЕ КОНТРОЛЬНО-УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ЛОКОМОТИВОВ-РЕЛЬСОСМАЗЫВАТЕЛЕЙ | 2009 |
|
RU2394716C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1997 |
|
RU2139215C1 |
| ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ ПЕРЕГОНА | 2012 |
|
RU2511750C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ | 1996 |
|
RU2131132C1 |
Изобретение относится к технике железнодорожного транспорта, в частности к устройствам оповещения ремонтных бригад. Технический результат заключается в повышении безопасности работы ремонтных бригад в широкой зоне работ. Устройство оповещения ремонтных бригад о приближении подвижного состава содержит n навигационных спутников, диспетчерский пункт, состоящий из приемной антенны, приемника спутниковых сигналов, вычислительного блока для определения поправок радионавигационных параметров по каждому из навигационных спутников, модулятора, передатчика, передающей антенны и вычислителя эталонных значений радионавигационных параметров, подвижной объект, установленный на локомотиве и состоящий из приемной антенны спутниковых сигналов, приемника спутниковых сигналов, вычислительного блока для определения местоположения подвижного объекта, первой приемной антенны, первого приемника, первого демодулятора, блока сопряжения, модулятора, передатчика, передающей антенны, второй приемной антенны, второго приемника и второго демодулятора, и устройство сигнализации, состоящее из приемной антенны, приемника, демодулятора, вычислительного блока для определения расстояния между подвижным объектом, устройством сигнализации, модулятора, передатчика, передающей антенны, приемной антенны спутниковых сигналов, приемника спутниковых сигналов и блока управления. 6 ил.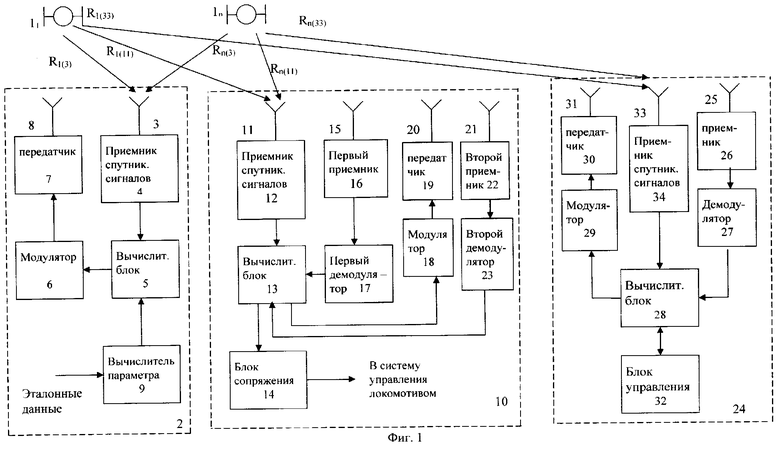
Устройство оповещения ремонтных бригад о приближении подвижного состава, содержащее n навигационных спутников, диспетчерский пункт, состоящий из последовательно соединенных приемной антенны, приемника спутниковых сигналов, вычислительного блока для определения поправок радионавигационных параметров по каждому из навигационных спутников, модулятора, передатчика и передающей антенны, и вычислителя эталонных значений радионавигационных параметров, соединенного со вторым входом вычислительного блока для определения поправок радионавигационных параметров по каждому из навигационных спутников, подвижной объект, установленный на локомотиве и состоящий из последовательно соединенных приемной антенны спутниковых сигналов, приемника спутниковых сигналов и вычислительного блока для определения местоположения подвижного объекта, последовательно соединенных первой приемной антенны, первого приемника и первого демодулятора, выход которого соединен со вторым входом вычислительного блока для определения местоположения подвижного объекта, блока сопряжения, вход которого соединен с первым выходом вычислительного блока для определения местоположения подвижного объекта, а выход блока сопряжения соединен с системой управления локомотивом, отличающееся тем, что оно дополнительно содержит устройство сигнализации, включающее последовательно соединенные приемную антенну, приемник, демодулятор, вычислительный блок для определения расстояния между подвижным объектом и устройством сигнализации, модулятор, передатчик и передающую антенну, последовательно соединенные приемную антенну спутниковых сигналов и приемник спутниковых сигналов, выход которого соединен со вторым входом вычислительного блока для определения расстояния между подвижным объектом и устройством сигнализации, блок управления, соединенный со вторым выходом и третьим входом вычислительного блока для определения расстояния между подвижным объектом и устройством сигнализации, а в подвижной объект введены последовательно соединенные модулятор, соединенный со вторым выходом вычислительного блока для определения местоположения подвижного объекта, передатчик и передающая антенна, последовательно соединенные вторая приемная антенна, второй приемник и второй демодулятор, выход которого соединен с третьим входом вычислительного блока для определения местоположения подвижного объекта, при этом в устройстве сигнализации вычислительный блок для определения расстояния между подвижным объектом и устройством сигнализации вычисляет координаты его местоположения и по известным координатам подвижного объекта вычисляет расстояние между подвижным объектом и устройством сигнализации, по результату этого вычисления блок управления сигнализирует о сближении с опасной критической точкой сближения подвижного состава и места ремонтных работ.
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2115140C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1997 |
|
RU2139215C1 |
| JP 2003200827, 15.07.2003 | |||
| JP 2003212121, 30.07.2003 | |||
| JP 2001347947, 18.12.2001. | |||

