Изобретение относится к вычислительной технике.
Известны устройства обработки навигационной измерительной информации, содержащие совокупность датчиков, вычислитель и блок регистрации.
Однако такие устройства исключают резервирование и недостаточно надежны при отсутствии информации от одного из датчиков. Эти недостатки, как правило, могут быть устранены при использовании разнородных датчиков и введении в состав устройств обработки переключателей режимов работы, управляемых блоком ввода данных.
Известны устройства обработки навигационной измерительной информации для вычисления местоположения объекта, содержащее блок датчиков, вычислитель, блок памяти и блок управления, выполняющий функции переключателя режимов работы. В этих устройствах выходы датчиков по управляющим сигналам блока управления соединяются с первым входом вычислителя, второй вход которого соединен с выходом блока памяти, а выход вычислителя подключен к входу блока регистрации. Такие устройства при адекватном выборе режима работы с помощью блока управления позволяют повысить надежность местоопределения, однако не исключают отказа при потере (пропадании, отсутствии) информации от одного из датчиков.
Известное устройство обработки навигационной измерительной информации, принятое за прототип, содержит блок датчиков навигационной информации, блок переключателей, вычислитель, блок ввода данных, блок памяти и блок регистрации. При этом выходы датчиков через переключатели соединены с первым входом вычислителя, второй вход которого соединен с выходом блока памяти, выходы блока ввода данных соединены соответственно с входом блока памяти и управляющим входом блока переключателей, а выход вычислителя подключен к входу блока регистрации. В известном устройстве датчики навигационной информации выполнены в виде приемников-измерителей навигационных параметров (НП) радионавигационных систем (РНС) с опорными наземными передающими станциями, а вычислитель - в виде преобразователя гиперболических координат в географические координаты. Для определения местоположения объекта необходимо измерить НП, по крайней мере не менее, чем трех наземных радионавигационных точек (РНТ), либо четырех РНТ на ИСЗ спутниковых систем навигации (ССН).
Однако, в практике навигационных измерений нередко наблюдаются ситуации, когда отсутствует надежная навигационная информация от одной (из минимально необходимого числа) РНТ, и в этих случаях местоопределение объекта с помощью известного устройства становится невозможным.
В основу изобретения положена техническая задача: создать устройство обработки навигационной измерительной информации, которое обеспечивало бы непрерывное надежное и точное вычисление местоположения объектов при отсутствии (либо потере) надежной навигационной информации от одной (или нескольких) РНТ, входящих в РНС или ССН.
Реализация предлагаемого устройства позволяет достичь следующего технического результата: вычислять местоположение объекта по совместной совокупности неполной навигационной информации от разных РНС и ССН, т. е. в отличие от аналогов и прототипа определение местоположения не требует полного набора навигационных данных, необходимых для автономной обработки информации каждой отдельной РНС или ССН.
Сущность изобретения заключается в том, что отдельные измерения НП на земных радиотрассах, недостаточные для автономного определения местоположения по этой РНС, преобразуются (редуцируются) в измерения на пространственных радиотрассах и обрабатываются совместно с НП ССН. И наоборот: отдельные, недостаточные для вычисления местоположения, измерения НП по пространственным радиотрассам ССН редуцируются в измерения на земных радиотрассах и обрабатываются совместно с НП наземных РНС.
Технический результат достигается за счет того, что в устройстве обработки навигационной измерительной информации, содержащем блок датчиков, блок переключателей, вычислитель, блок ввода данных, блок памяти и блок регистрации, блок датчиков содержит n приемников-измерителей НП РНС с опорными наземными передающими станциями и m приемников-измерителей НП ССН, блок переключателей содержит (n+2m) переключателей, вычислитель включает n блоков редуцирования земной радиотрассы, m блоков редуцирования пространственной радиотрассы, m блоков вычисления координат РНТ, блок вычисления поверхностных координат и блок вычисления пространственных координат. Наряду со связями функциональных элементов, известных в аналогах и прототипе, выходы датчиков через переключатели соединены с первым входом вычислителя, второй вход которого соединен с выходом блока памяти, выходы блока ввода данных соединены соответственно с входом блока памяти и управляющим входом блока переключателей, а выход вычислителя подключен к входу регистрации, введены новые связи, обусловленные новой структурой устройства обработки: выходы n приемников-измерителей соединены с входами n соответствующих переключателей, первый и второй выходы m приемников-измерителей соединены с входами 2m соответствующих переключателей, первые выходы n переключателей соединены с первым входом блока вычисления поверхностных координат, вторые входы n переключателей соединены с входами соответствующих n блоков редуцирования земной радиотрассы, выходы которых соединены с первым входом блока вычисления пространственных координат, первые выходы нечетных из 2m переключателей соединены с первыми входами m соответствующих блоков редуцирования пространственной радиотрассы, выходы которых соединены с первым входом вычисления поверхностных координат, вторые выходы нечетных из 2m переключателей соединены с первым входом блока вычисления пространственных координат, первые выходы четных из 2m переключателей соединены с вторыми входами m соответствующих блоков редуцирования пространственной радиотрассы и с входами m соответствующих блоков вычисления координат РНТ, выходы которых соединены с вторым входом блока вычисления поверхностных координат, вторые выходы четных из 2m переключателей соединены с вторым входом блока вычисления пространственных координат.
Существенными, отличительными от аналогов и прототипа, признаками являются блоки редуцирования земной радиотрассы, блоки редуцирования пространственной радиотрассы и блоки вычисления координат РНТ.
Блок редуцирования земной радиотрассы содержит последовательно соединенные делитель, блок вычисления тригонометрической функции (ВТФ) и умножитель.
Блок редуцирования пространственной радиотрассы содержит блок вычисления суммы квадратов трех чисел (ВСКЧ), блок возведения в квадрат, вычитатель, сумматор, блок извлечения квадратного корня (ИКК), делитель, блок вычисления обратной тригонометрической функции (ВОТФ) и два умножителя. Вход блока возведения в квадрат является первым входом блока редуцирования, вход блока ВСКЧ является вторым входом блока редуцирования, выход устройства ВСКЧ соединен с входами сумматора и устройства ИКК, выход блока возведения в квадрат соединен с первым входом вычитателя, выход сумматора соединен с вторым входом вычитателя, выход блока ИККА соединен с входом первого умножителя, выход вычитателя соединен с первым входом делителя, выход первого умножителя соединен с вторым входом делителя, выход делителя соединен с входом блока ВОТФ, выход блока ВОТФ соединен с входом второго умножителя, а выход второго умножителя является выходом блока редуцирования.
Блок вычисления координат РНТ содержит три регистра памяти, два делителя, два блока ВОТФ, блок ВТФ и умножитель, причем входы регистров памяти являются входом блока вычисления, выход первого регистра соединен с первым входом первого делителя и вторым входом второго делителя, выход второго регистра соединен с вторым входом первого делителя, выход первого делителя соединен с входом первого блока ВОТФ, выход первого блока ВОТФ соединен с входом блока ВТФ, выход блока ВТФ соединен с первым входом умножителя, выход третьего регистра памяти соединен с вторым входом умножителя, выход умножителя соединен с первым входом второго делителя, выход делителя соединен с входом второго блока ВОТФ, а выходы первого и второго блоков ВОТФ являются выходом блока вычисления координат РНТ.
В предлагаемом устройстве блок вычисления поверхностных координат выполнен в виде преобразователя измеренных НП в географические координаты, а блок вычисления пространственных координат - в виде преобразователя измеренных НП в пространственные координаты.
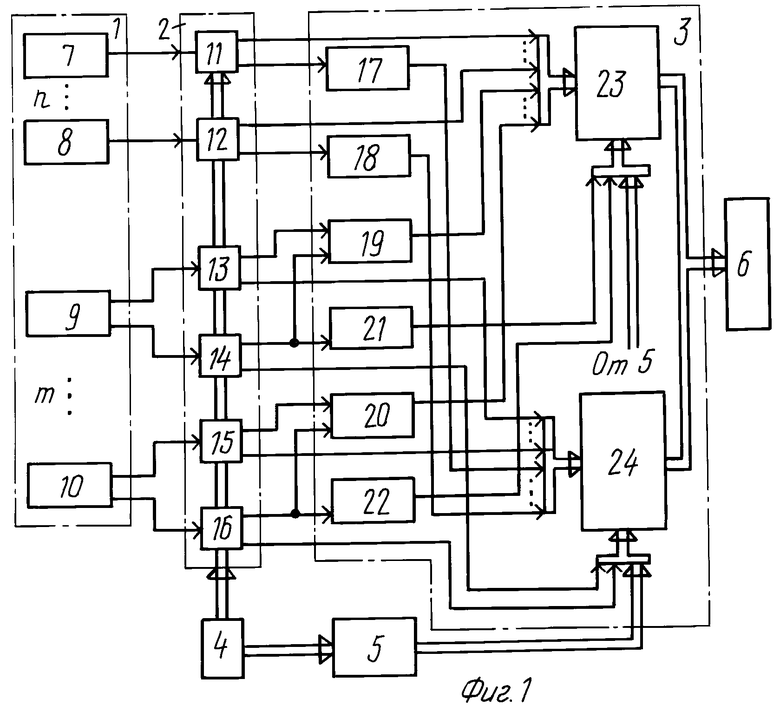
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - вариант выполнения блока редуцирования земной радиотрассы; на фиг. 3 - вариант выполнения блока редуцирования пространственной радиотрассы; на фиг. 4 - вариант выполнения блока вычисления координат РНТ.
Устройство обработки содержит блок 1 датчиков, блок 2 переключателей, вычислитель 3, блок 4 ввода данных, блок 5 памяти, блок 6 регистрации, n приемников-измерителей 7 и 8 НП РНС, m приемников-измерителей 9 и 10 НП ССН, (n-2m) переключателей 11-16, n блоков 17 и 18 редуцирования земной радиотрассы, m блоков 19 и 20 редуцирования пространственной радиотрассы, m блоков 21 и 22 вычисления координат РНТ, блок 23 вычисления поверхностных координат, блок 24 вычисления пространственных координат.
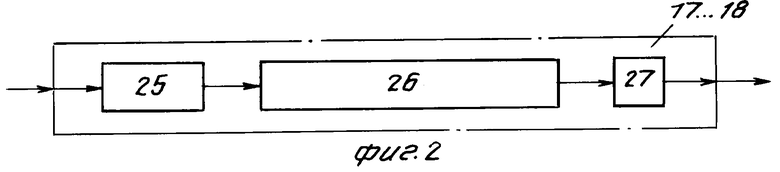
Блоки 17 и 18 содержат делитель 25, блок 26 ВТФ и умножитель 27.
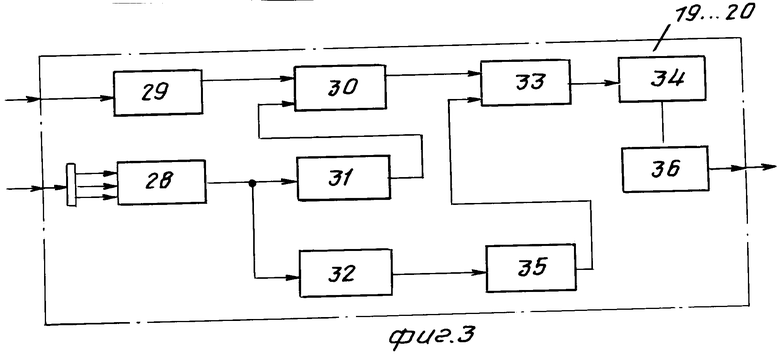
Блоки 19 и 20 содержат блок 28 ВСКЧ, блок 29 возведения в квадрат, вычитатель 30, сумматор 31, блок 32 ИКК, делитель 33, блок 34 ВОТФ, первый и второй умножители 35 и 36.
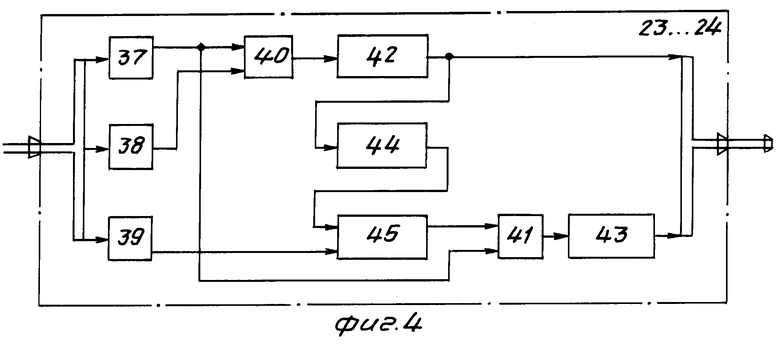
Блоки 21 и 22 содержат первый 37, второй 38 и третий 39 регистры памяти, первый 40 и второй 41 делители, первый 42 и второй 43 блоки ВОТФ, блок 44 ВТФ и умножитель 45.
Устройство работает следующим образом.
Приемники-измерители 7 и 8 принимают сигналы РНС и измеряют НП, соответствующие линиям положения объекта. Значения Sn измеренных НП РНС с выходов приемников-измерителей 7 и 8 поступают на входы соответствующих переключателей 11 и 12. Приемники-измерители 9 и 10 принимают сигналы ССН, измеряют НП, соответствующие поверхностям положения и пространственные координаты РНТ в ССН. Значения Rmизмеренных НП ССН с первых выходов приемников-измерителей 9 и 10 поступают на входы соответствующих переключателей 13-15, а значения (Xm, Ym, Zm) измеренных пространственных координат РНТ ССН - на входы соответствующих переключателей 14-16.
В работе устройства можно выделить два режима: 1) режим вычисления поверхностных координат (Bo, Lo) и 2) режим вычисления пространственных координат (Xo, Yo, Zo).
В первом режиме блок 4 ввода данных устанавливает переключатели 11-16 блока 2 переключателей в положение "Вычисление поверхностных координат (Bo, Lo)", и значения НП РНС с первых выходов переключателей 11 и 12 поступают на первый вход блока 23 вычисления поверхностных координат. Значения Rm НП ССН с первых выходов переключателей 13-15 поступают на первые входы блоков 19 и 20 редуцирования пространственной радиотрассы. На вторые входы блоков 19 и 20 с первых выходов переключателей 14-16 поступают значения (Xm, Ym, Zm) измеренных координат РНТ ССН. С выходов блоков 19 и 20 значения Rmr редуцированных пространственных радиотрасс поступают на первый вход блока 23. На входы блоков 21 и 22 вычисления координат РНТ поступают значения измеренных пространственных координат (Xm, Ym, Zm) РНТ, а с выходов блоков 21 и 22 соответствующие этим значениям значения поверхностных координат (Bm, Lm) поступают на второй вход блока 23. Блок 23 по значениям Sn, Rmr, поступающим на первый вход, а также по значениям координат (Bт, Lт) наземных опорных станций РНС, поступающих на второй вход блока 23 с выхода блока 5 памяти, и по значениям (Bm, Lm) координат РНТ ССН вычисляет поверхностные координаты объекта (Bo, Lo).
Во втором режиме блок 4 ввода данных устанавливает переключатели 11-16 блока 2 переключателей в положение "Вычисление пространственных координат (Xo, Yo, Zo)", и значения Rm НП ССН с вторых выходов переключателей 13-15 поступают на первый вход блока 24 вычисления пространственных координат, а значения (Xm, Ym, Zm) измеренных координат РНТ с вторых выходов переключателей 14-16 - на второй вход блока 24. Значения Sn НП РНС с вторых выходов переключателей 11 и 12 поступают на входы соответствующих блоков 17 и 18 редуцирования земной радиотрассы. С выходов блоков 17 и 18 значения Snr редуцированных земных радиотрасс поступают на первый вход блока 24. Блок 24 по значениям Rm, Snr, поступающим на первый вход, а также по значениям (Xm, Ym, Zm) координат РНТ, поступающим на второй вход блока 24 с вторых выходов переключателей 14-16, и по значениям (Xт, Yт, Zт), поступающим на второй вход блока 24 с выхода блока 5 памяти, вычисляет пространственные координаты объекта (Xo, Yo, Zo). Значения поверхностных и пространственных координат (Bo, Lo) и (Xo, Yo, Zo) с выходов блоков 23 и 24 вычисления поступают на вход блока 6 регистрации. Блок 4 ввода данных формирует управляющие сигналы переключения режимов, которые поступают на управляющий вход блока 2 переключателей и соответственно на управляющие входы переключателей 11-16, а также на вход блока 5 памяти. С выхода блока 5 памяти на вторые входы блоков 23 и 24 вычисления координат поступают значения координат (Bт, Lт) и (Xт, Yт, Zт), а также значения констант, необходимых для вычисления.
Блоки 17-18 редуцирования земной трассы выполнены в виде вычислительных устройств, реализующих алгоритм
Snr= 2ro sin (Sn/2ro), (1) где Snr - значение редуцированной земной радиотрассы;
Sn - измеренное значение НП РНС (протяженность земной радиотрассы);
ro - радиус Земли; и функционируют следующим образом.
Измеренные значения Sn поступают на вход делителя 25, вырабатывающего сигнал Sn/2ro, который поступает на вход блока 26 ВТФ. Блок 26 ВТФ вырабатывает сигнал sin (Sn/2ro), поступающий на вход умножителя 27. На выходе умножителя 27, который является и выходом блоков 17 и 18 редуцирования земной радиотрассы, вырабатывается сигнал (1).
Блоки 19 и 20 редуцирования пространственной радиотрассы выполнены в виде вычислительных устройств, реализующих алгоритм
Rmr= roarccos  , (2) где Rmr - значение редуцированной пространственной радиотрассы;
, (2) где Rmr - значение редуцированной пространственной радиотрассы;
Rm - измеренное значение НП ССН (протяженность пространственной радиотрассы);
rm2= Xm2+Ym2+Zm2 - квадрат радиуса-вектора РНТ ССН с координатами (Xm, Ym, Zm);
ro - радиус Земли.
Блоки 19 и 20 функционируют следующим образом.
На вход блока 28 ВСКЧ, являющийся вторым входом блоков 19-20, поступают значения координат (Xm, Ym, Zm) РНТ, на вход блока 29, являющийся первым входом блоков 19 и 20, поступают значения Rm. С выхода блока 28 сигнал rm2= Xm2+Ym2+Zm2 поступает на входы сумматора 31 и блока 32 ИКК. Сумматор 31 вырабатывает значения (rm2+ro2), которые поступают на второй вход вычитателя 30, на первый вход которого поступает сигнал Rm2 с выхода блока 29. С выхода блока 32 ИКК сигнал r поступает на вход первого умножителя 35, с выхода которого значения 2ro rm поступают на второй вход делителя 33. На первый вход делителя 33 поступает сигнал (rm2+ro2- Rm2) с выхода вычитателя 30. С выхода делителя сигнал (rm2+ro2- Rm2)/2ro rm поступает на вход блока 34 ВОТФ, который вырабатывает сигнал arccos(rm2+ro2-Rm2)/2rorm, поступающий на вход второго умножителя 36. На выходе второго умножителя, являющегося и выходом блоков 19 и 20, вырабатывается сигнал (2).
Блоки 21 и 22 вычисления координат РНТ выполнены в виде вычислителя, реализующего алгоритм
Bm= arctg , (3)
, (3)
Lm= arctg Ym/Xm, где Bm, Lm - широта и долгота РНТ с пространственными декартовыми координатами (Xm, Ym, Zm).
Блоки 21 и 22 функционируют следующим образом.
Значения Xm, Ym, Zm запоминаются в регистрах 37-39 памяти. Первый делитель 40 по сигналам Xm и Ym вырабатывает сигнал Ym/Xm, который поступает на вход блока 42 ВОТФ. Блок 42 ВОТФ формирует сигнал arctg (Ym/Xm), который поступает на вход блока 44 ВТФ, вырабатывающего сигнал cos Lm. На первый вход умножителя 45 поступает сигнал cos Lm, на второй его вход - сигнал Zm. С выхода умножителя сигнал Zm ˙cos Lm поступает на первый вход второго делителя 41, на второй вход которого поступает сигнал Xm с первого регистра 37 памяти. Сигнал с выхода второго делителя 41 поступает на вход второго блока 43 ВОТФ, который формирует сигнал Bm в соответствии с выражением (3). Таким образом, на выходах первого и второго блоков ВОТФ 42 и 43, являющихся выходом блоков 21 и 22, вырабатывается пара сигналов (Bm, Lm).
Блок 23 вычисления поверхностных координат выполнен в виде преобразователя измеренных НП в географические координаты (Bo, Lo), а блок 24 вычисления пространственных координат - в виде преобразователя измеренных НП в пространственные координаты (Xo, Yo, Zo).
Таким образом, за счет новых существенных признаков предложенного устройства получен новый технический результат: повышение надежности и точности непрерывного местоопределения объекта при отсутствии (потере) информации от одной или нескольких РНТ, входящих в РНС или ССН. Возможность практического осуществления технического результата подтверждается испытаниями макета и моделированием процесса обработки навигационной измерительной информации. Сравнительные оценки, проведенные на основе экспериментальных данных показывают, что в отличие от аналогов и прототипа определение местоположения не требует полного набора навигационных данных, необходимых для автономной обработки информации каждой отдельной РНС или ССН, и предлагаемое устройство обеспечивает непрерывное надежное и точное вычисление местоположения.
(56) Авторское свидетельство СССР N 1495819, кл. G 06 F 15/50, 1989.
Патент США N 3648034, кл. 235/150.26, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроакустическая система навигации акустической системы донных маяков | 1989 |
|
SU1838797A3 |
| СПОСОБ И УСТРОЙСТВО КОРРЕКЦИИ КООРДИНАТ В ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЕ НАВИГАЦИИ | 1994 |
|
RU2106657C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА | 1989 |
|
SU1816186A1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2553270C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
Использование: обработка навигационной измерительной информации радиотехнических систем местоопределения с опорными наземными станциями и спутниковых систем навигации. Сущность изобретения: устройство содержит блок датчиков, блок переключателей, вычислитель, блок ввода данных, блок памяти, блок регистрации. Устройство обеспечивает вычисление местоположения объекта по совместной неполной навигационной информации от разных радионавигационных и спутниковых систем навигации. 4 з. п ф-лы, 4 ил.
