Предлагаемое изобретение относится к области спутниковой навигации и может быть использовано для определения углового положения объектов в пространстве или на плоскости.
Известен способ определения положения объектов, заключающийся в приеме объектом и наземной контрольно-корректирующей станцией (ККС) сигналов навигационных спутников, измерении на объекте и контрольно-корректирующей станции дальностей от соответствующих навигационных спутников, вычислении на контрольно-корректирующей станции поправок к измеряемым параметрам (например, к дальностям) для всех радиовидимых навигационных спутников по разности между истинными дальностями и измеренными дальностями, излучении полученных поправок с контрольно-корректирующей станции, приеме на объекте сигналов, излученных контрольно-корректирующей станцией и определении координат и скорости подвижного объекта по измеренным дальностям от соответствующих спутников и значениям поправок к ним [1, с.285-290].
Данная система решает задачу высокоточного определения координат объекта. Недостатком данного способа является невозможность измерения угловой ориентации и компенсации погрешности измерения угловой ориентации, вызванной атмосферной рефракцией.
Известен способ угловой ориентации объекта по радинавигационным сигналам космических аппаратов (варианты) [2], взятый в качестве прототипа, в котором по варианту 1, основанному на приеме сигналов от n навигационных космических аппаратов (НКА) двумя или более антенно-приемными устройствами, расположенными параллельно одной или двум осям объекта, выделении сигнала с частотой Доплера, определении набега фаз за интервал времени измерения и определении углового положения объекта, в течение интервала времени измерения производят m измерений фазовых сдвигов между парами антенно-приемных устройств, а угловое положение объекта определяют путем решения следующей системы уравнений:
где i=1,...,n; j=1...,m; n - число сигналов НКА, принимаемых объектом; m - общее число разновременных измерений; cos*βxyz = B•cosβxyz - произведение неизвестной базы В (расстояния между антеннами объекта) на ее направляющие косинусы cosβxyz, подлежащие определению; kxij, kyij, kzij - направляющие косинусы направлений потребитель - i-й НКА (далее в материалах заявки названные коэффициентами системы уравнений); λi - длина волны сигнала i-го НКА; ϕij - измеренные значения фазовых сдвигов сигналов i-го НКА, принятых антеннами объекта в j-м измерении; ΔΦi - неизвестная систематическая погрешность измеренной разности фаз, обусловленная разным временем прохождения сигналов в каналах приемоиндикатора и неоднозначностью, вызванной тем, что расстояние между антеннами превышает длину волны принимаемого сигнала.
Недостатком прототипа является недостаточная точность определения угловой ориентации объекта при наличии погрешностей, обусловленных, например, прохождением радиосигналов через слои атмосферы, рефракцией и т.д.
В основу изобретения положена задача повышения точности определения угловой ориентации объектов по сигналам спутниковых радинавигационных систем при наличии погрешностей, обусловленных влиянием среды прохождения радиосигналов.
Поставленная задача решается тем, что в способе угловой ориентации объекта по сигналам навигационных космических аппаратов, основанном на приеме сигналов от n HKA двумя или более антенно-приемными устройствами, расположенными параллельно одной или двум осям объекта, определении набега фаз за интервал времени измерения, согласно изобретению, дополнительно принимают сигналы HKA, по крайней мере, в двух известных точках контрольно-корректирующей станции, образующих базовые линии с известной угловой ориентацией, определяют эталонные значения направляющих косинусов направлений на HKA по известным координатам ККС и HKA, а также поправки к полученным значениям направляющих косинусов направлений на HKA, излучают сигналы, с информацией о поправках к значениям направляющих косинусов направлений на HKA, принимают на объекте сигналы контрольно-корректирующей станции, определяют угловую ориентацию объекта по набегу фаз сигналов, принятых антеннами объекта от HKA и поправкам к направляющим косинусам направлений на HKA, принятым от контрольно-корректирующей станции.
Преимущество предлагаемого технического решения заключается в повышении точности определения угловой ориентации объекта по радионавигационным сигналам HKA вследствие того, что угловое положение объекта определяется по скорректированным значениям направляющих косинусов направлений на HKA. Это приводит к исключению составляющих погрешностей, обусловленных влиянием среды распространения принятых радиосигналов.
Изобретение поясняется прилагаемыми чертежами, на которых фиг.1 поясняет изменение линии визирования НКА вследствие рефракции принятого радиосигнала в слоях атмосферы; на фиг.2 представлена структурная схема системы определения угловой ориентации объекта; на фиг.3 - блок-схема алгоритма работы вычислительного блока ККС; на фиг.4 - блок-схема алгоритма работы вычислительного блока объекта; на фиг.5 - структурная схема варианта реализации вычислительного блоков ККС и объекта.
Сущность предлагаемого способа можно пояснить следующим образом.
При определении угловой ориентации объектов используют результаты измерений косинусов углов αi между вектором-базой и вектором-направлением на i-й НКА.
Фазовый сдвиг сигнала i-го НКА, принимаемого двумя пространственно разнесенными антеннами и косинус угла αi между вектором-базой и вектором-направлением на НКА связаны выражением [3, с.79]:
Вычисление направляющих косинусов вектора-базы осуществляют на основе уравнения, полученного исходя из свойства скалярного произведения векторов в декартовой системе координат:
где x, y, z - известные координаты объекта в геоцентрической системе координат (ГЦСК); xci, yci, zci - известные координаты i-го НКА в ГЦСК;  расстояние между объектом и i-м НКА, полученное на основе известных координат НКА и объекта.
расстояние между объектом и i-м НКА, полученное на основе известных координат НКА и объекта.
Введем обозначения:
Коэффициенты kxi, kyi, kzi являются направляющими косинусами векторов-направлений от объекта до i-гo HKA и представляют собой коэффициенты системы линейных уравнений (2). С учетом принятых обозначений система уравнений (2) запишется следующим образом:
Систему уравнений (4) можно дополнить нелинейным уравнением связи между направляющими косинусами, которое имеет вид:
(coβx)2+(cosβy)2+(cosβz)2 = 1. (5)
При определении углового положения объекта часто неизвестными являются не только направляющие косинусы вектора-базы, но и сама величина базы В. В связи с этим выражения (4) и (5) запишутся следующим образом:
X2 + Y2 + Z2 = B2, (7)
где X = B•cosβx, Y = B•cosβy, Z = B•cosβz - геоцентрические координаты фазового центра второй антенны относительно фазового центра первой антенны, взятой в качестве опорной.
Согласно прототипу определение углового положение объекта осуществляется путем решения системы уравнений, составленной по измеренным значениям фазовых сдвигов принятых сигналов, с учетом принятых обозначений имеющей вид:
На фиг. 1a изображено изменение направления линии визирования НКА вследствие атмосферной рефракции. Точка 1 соответствует истинному положению НКА с координатами xci, yci, zci, точка 1* соответствует кажущемуся положению НКА, обусловленному рефракцией радиосигнала в слоях атмосферы. Линия Л - соответствует вектору-направлению от объекта к НКА, полученному по известным координатам объекта и НКА, направляющие косинусы этого вектора определяются в соответствии с (3). Линия Л* соответствует фактическому направлению прихода радиосигнала, полученному вследствие атмосферной рефракции, косинус угла между этим направлением и вектором-базой между антеннами объекта А0 и А1 пропорционален значению фазового сдвига между сигналами, принятыми антеннами (1).
Таким образом, значения коэффициентов kxij, kyij, kzij, находящихся в левой части системы уравнений (8), и косинуса угла между вектором-базой и направлением на НКА в правой части соответствуют разным векторам, что приводит к погрешности оценки неизвестных параметров X, Y, Z.
На фиг.1б изображены направляющие косинусы линий Л и Л*, соответствующие истинному 1 и видимому 1* положениям НКА в проекции на оси системы координат, связанной с объектом.
При известных значениях направляющих косинусов X0, Y0, Z0 базовой линии между антеннами 3 и 4 ККС (фиг.2), могут быть найдены систематические погрешности измерений фазовых сдвигов принятых сигналов ΔΦi, состоящие из неоднозначности измерений и аппаратурной составляющей. С учетом этого система уравнений (8) может быть записана следующим образом:
где Φij = ϕij+ΔΦi - значения полного фазового сдвига с учетом систематической погрешности для i-гo HKA в j-м измерении.
Для нахождения скорректированных значений коэффициентов k*xij, k*yij, k*zij используется система уравнений, составленная по известным направляющим косинусам между антеннами 3 и 4 (ККС):
Данная система уравнений решается для нахождения неизвестных коэффициентов k*xij, k*yij, k*zij по известным значениям X0, Y0, Z0. Система (10) для каждого из HKA содержит 3 неизвестных, следовательно, для однозначного определения k*xij, k*yij, k*zij необходимо по 3 уравнения для каждого из HKA.
Согласно фиг. 1б векторы Л, Л* и ось 0Y лежат в одной плоскости, что позволяет найти скорректированные значения коэффициентов k*xij, k*yij, k*zij для каждого HKA по одному уравнению (10).
На фиг.1б векторы 0-1 и 0-1* имеют единичную длину, следовательно, координаты этих векторов x, y, z и х*, у*, z* представляют собой направляющие косинусы векторов-направлений прихода сигнала из точек 1 и 1*. Длины отрезков 0А и 0А* определятся из выражений:
Поскольку векторы Л, Л* и ось 0Y лежат в одной плоскости, то отрезки 0А и 0А* лежат на одной прямой. Следовательно, справедливы следующие соотношения:
где Ψ - угол между отрезками 0А (0А*) и осью 0Х.
С учетом выражений (11) и (12) получим:

Перейдя от обозначений фиг. 1б к обозначениям коэффициентов уравнения (10), получим:
С учетом (14) уравнение (10) для i-гo HKA в j-м измерении запишется в виде:
Данная система для каждого из HKA содержит по одному неизвестному и может быть решена на практике относительно неизвестного значения k*yij. Значения k*xij и k*zij для ККС определяют в соответствии с (14).
В силу того, что объект может быть удален от ККС на значительное расстояние, с целью повышения точности передают не эталонные значения направляющих косинусов направлений на НКА, а их поправки Δkxij,Δkyij, Δkzij поскольку значения направляющих косинусов направлений на НКА для ККС и объекта могут быть разными. Значения Δkxij,Δkyij, Δkzij определяются как разность между эталонными и измеренными значениями направляющих косинусов на НКА для ККС:
Данные поправки, излученные ККС, принимаются подвижной станцией объекта и служат для коррекции погрешностей, обусловленных преломлением сигналов на трассе распространения.
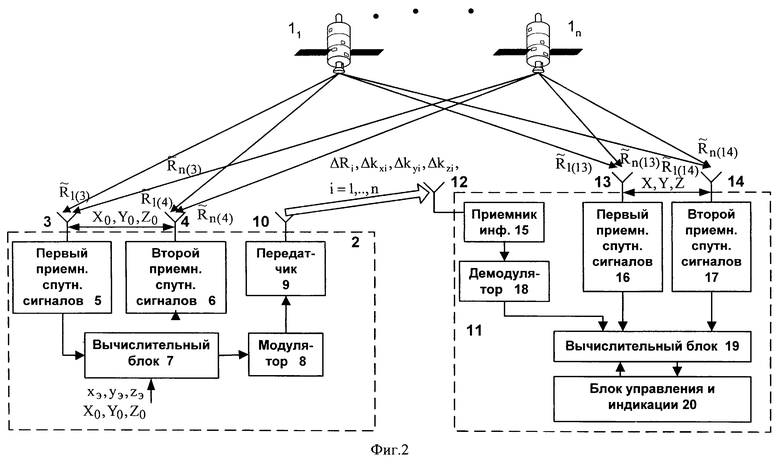
Предложенный способ может быть реализован системой, которая (фиг.2) содержит n НКА 11-1n, контрольно-корректирующую станцию 2, содержащую первую 3 и вторую 4 приемные антенны, подключенные соответственно ко входам первого 5 и второго 6 приемников спутниковых сигналов, вычислительный блок 7, первым и вторым входами подключенный соответственно к выходам первого 5 и второго 6 приемников спутниковых сигналов, а выходом - к модулятору 8, последовательно соединенному с передатчиком 9 и передающей антенной 10, и аппаратуру подвижной станции 11, содержащую приемные антенны 12, 13, 14, приемник информации 15, входом подключенный к антенне 12, первый 16, второй 17 приемники спутниковых сигналов, входы которых соединены соответственно с приемными антеннами 13 и 14, демодулятор 18, вход которого соединен с выходом приемника информации 15, вычислительный блок 19, первый вход которого соединен с выходом демодулятора 18, второй и третий входы - с выходами приемников спутниковых сигналов 16 и 17 соответственно, четвертый вход - с выходом а выход - с информационным входом блока управления и индикации 20.
Устройство работает следующим образом.
Контрольно-корректирующая станция 2 антеннами 3, 4 приемников спутниковых сигналов 5, 6 принимает сигналы НКА 1l-1n, определяет радионавигационные параметры  и
и  а также их разности
а также их разности  для каждого из НКА. Положение антенн 3, 4 можно определить, например, с помощью теодолита и лазерного дальномера [5]. С выходов приемников спутниковых сигналов 5, 6 измеренные значения радионавигационных параметров
для каждого из НКА. Положение антенн 3, 4 можно определить, например, с помощью теодолита и лазерного дальномера [5]. С выходов приемников спутниковых сигналов 5, 6 измеренные значения радионавигационных параметров  и
и  и их разностей поступают на первый и второй входы вычислительного блока 7, на третий вход которого поступают известные координаты антенны 3 ККС (хэ, yэ zэ) и направляющие косинусы базовой линии между антеннами 3 и 4 ККС (X0, Y0, Z0).
и их разностей поступают на первый и второй входы вычислительного блока 7, на третий вход которого поступают известные координаты антенны 3 ККС (хэ, yэ zэ) и направляющие косинусы базовой линии между антеннами 3 и 4 ККС (X0, Y0, Z0).
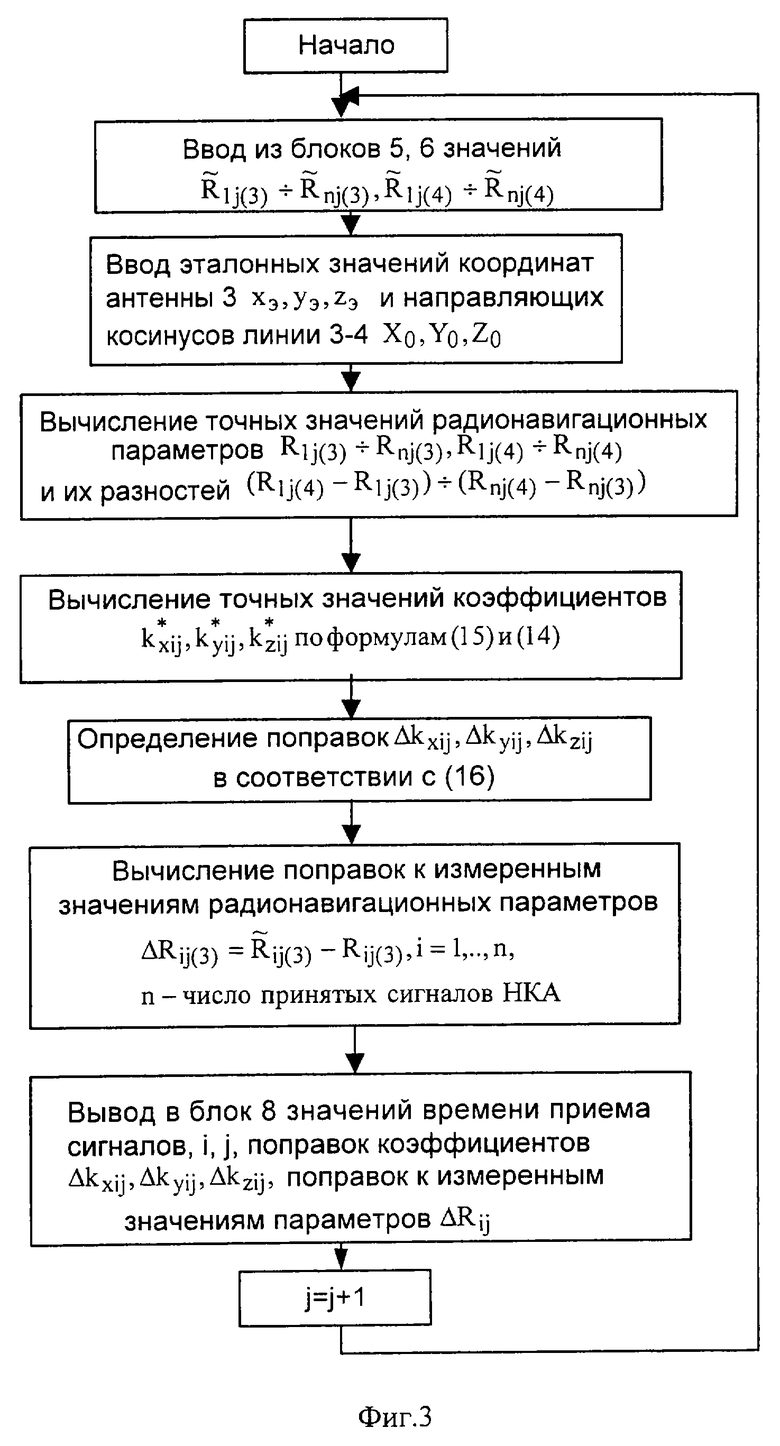
Вычислительный блок 7 вырабатывает значения поправок к направляющим косинусам направлений на НКА Δkxij,Δkyij, Δkzij в соответствии с алгоритмом, приведенным на фиг. 3. С выхода вычислительного блока 7 сигналы, в которых содержится информация о номере НКА, времени приема навигационного сигнала, поправках к направляющим косинусам для всех принимаемых НКА Δkxi,Δkyi, Δkzi и поправках к измеренным радионавигационным параметрам ΔRi/ поступают на модулятор 8. С выхода модулятора 8 сигналы поступают в передатчик 9, где преобразуются, усиливаются и излучаются в пространство антенной 10.
Объект, оснащенный подвижной станцией 11, антенной 12 принимает сигналы ККС 2, которые поступают на вход приемника информации 15, где происходит селекция, усиление и преобразование частоты принимаемых сигналов. С выхода приемника информации 15 сигналы поступают на вход демодулятора 18, выделяющего из сигналов информацию о номере НКА, времени приема сигнала, поправках Δkxij,Δkyij, Δkzij, сформированных вычислительным блоком 7. С выхода демодулятора 18 полученная информация поступает в вычислительный блок 19.
Одновременно сигналы НКА 1l÷1n принимаются антеннами 13 и 14, подключенными соответственно к входам первого 16 и второго 17 приемников спутниковых сигналов, производящих определение радионавигационных параметров  и
и  выходов приемников информация о номерах НКА, времени приема сигналов и значениях радионавигационных параметров
выходов приемников информация о номерах НКА, времени приема сигналов и значениях радионавигационных параметров 
 поступает в вычислительный блок 19.
поступает в вычислительный блок 19.
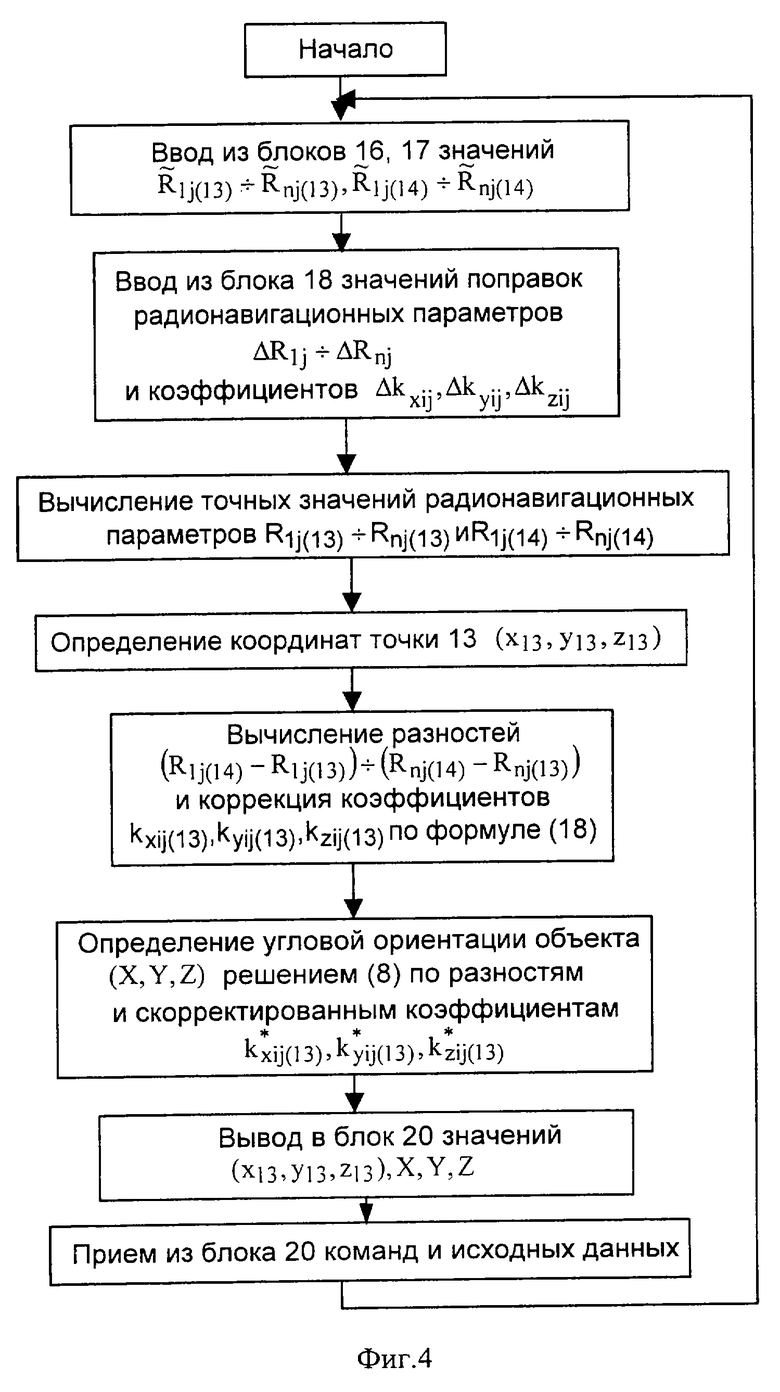
Вычислительный блок 19 выполняет циклическую обработку вводимой информации в соответствии с алгоритмом, блок-схема которого приведена на фиг.4.
После ввода информации из блоков 15, 16, 17 вычислительный блок 19 выполняет коррекцию радионавигационных параметров, измеренных первым приемником спутниковых сигналов 16 в точке 13, взятой в качестве опорной  в соответствии с [1, с.288]:
в соответствии с [1, с.288]:
В результате коррекции получают точные значения радионавигационных параметров R1(13)÷Rn(13), которые используются для вычисления точных координат опорной антенны 13. Аналогичным образом выполняется коррекция радионавигационных параметров  измеренных вторым приемником спутниковых сигналов 17 в точке 14. В случае использования в качестве радионавигационных параметров результатов измерений псевдодальностей для определения координат антенн может быть использован алгоритм, приведенный, например в [1, с.222].
измеренных вторым приемником спутниковых сигналов 17 в точке 14. В случае использования в качестве радионавигационных параметров результатов измерений псевдодальностей для определения координат антенн может быть использован алгоритм, приведенный, например в [1, с.222].
После вычисления точных значений радионавигационных параметров Rl(13)÷Rn(13) и R1(14)÷Rn(14) осуществляется вычисление разностей Rl(14)-R1(13)÷Rn(14)-Rn(13). Кроме того, вычислительный блок 19 выполняет коррекцию значений направляющих косинусов направлений на НКА для определения угловой ориентации, используя поправки Δkxij,Δkyij, Δkzij по формулам:
где kxij(13), kyi(13), kzi(13) - измеренные значения направляющих косинусов, полученные по известным координатам точки 13 и НКА; k*xij(13), k*yi(13), k*zi(13) - скорректированные значения направляющих косинусов; Δkxij,Δkyij, Δkzij - поправки к направляющим косинусам, поступающие в вычислительный блок 19 с выхода демодулятора 18.
В результате такой обработки получают координаты точки 13 с погрешностью не более нескольких метров в зависимости от расстояния между контрольно-корректирующей станцией и объектом [1, с.282-283]. При определении радионавигационных параметров с использованием информации о фазе несущей частоты координаты точки 13 могут быть определены с погрешностью менее 0,1 м.
Систему (8) решают по скорректированным значениям коэффициентов k*xij(13), k*yi(13), k*zi(13) и значениям фазовых сдвигов, накопленным на интервале времени измерения. В результате получают точные значения направляющих косинусов X, Y, Z базовой линии объекта, соединяющей точки 13 и 14. Значения направляющих косинусов базовой линии объекта X, Y, Z из связанной с объектом системы координат могут быть пересчитаны в любую другую систему, с использованием известных соотношений.
Полученные значения угловой ориентации объекта (X, Y, Z) и точных координат точки 13 (x13, y13, z13) выдаются из вычислительного блока 19 в блок управления и индикации 20 для отображения.
Длительность цикла работы системы определения угловой ориентации объекта выбирается таким образом, чтобы успевали выполняться прием, измерения, обработка, передача навигационной и измерительной информации.
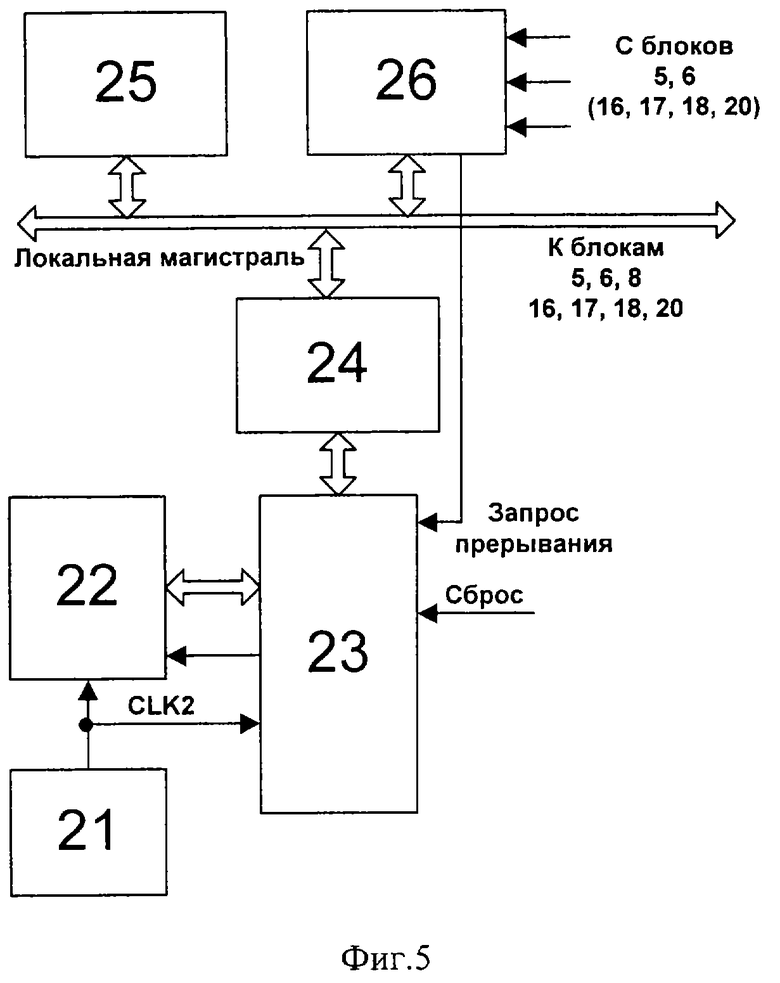
Вычислительные блоки 7 и 19 в связи с большим объемом вычислений необходимо реализовать, например, на основе микропроцессора Intel 80386 по типовой структуре, описанной, в [4, с.13].
На фиг. 5 приведена структурная схема варианта вычислительного блока, содержащего тактовый генератор 21, арифметический сопроцессор 22, микропроцессор 23, соединенный с локальной магистралью при помощи логики управления магистралью 24, локальную память 25, служащую для хранения программ и промежуточных данных и контроллер прерываний 26, осуществляющий взаимодействие с блоками 5, 6 (16, 17, 18, 20).
Локальная магистраль состоит из шины данных, по которой передается информация с подключенных внешних устройств: первого приемника спутниковых сигналов 5 (16), второго приемника спутниковых сигналов 6 (17), демодулятора 18, а также организуется выдача информации в блок 8 (20), шины адреса, служащей для адресации памяти и выбора внешних устройств и шины управляющих сигналов, таких как "Чтение памяти", "Запись в память", необходимых при работе программ. Контроллер прерываний 26 обрабатывает сигналы прерываний от блоков 5, 6 (16, 17, 18, 20) и вырабатывает сигнал "Запрос прерывания", поступающий на вход маскируемого прерывания микропроцессора 23. Локальная память 25 содержит постоянное запоминающее устройство (ПЗУ) и оперативное запоминающее устройство (ОЗУ). В ПЗУ содержится программа обработки, реализующая алгоритм, приведенный на фиг.4 (фиг.5), а также константы и другая необходимая информация. ОЗУ содержит текущие данные, приходящие с блоков 5, 6, (16, 17, 18, 20) информацию, необходимую для передачи блок модулятора 8 (управления и индикации 20) и промежуточные результаты вычислений. Арифметический сопроцессор 22 соединен локальной магистралью с микропроцессором 23 и предназначен для выполнения математических вычислений. Тактовый генератор 21 формирует сигналы тактовой частоты CLK2, поступающие на входы тактовой частоты микропроцессора 23 и сопроцессора 22.
При реализации вычислительного блока 7 (19) на базе микропроцессора Intel 80386 должны быть использованы микросхемы следующих типов: тактовый генератор 21 - i82384; микропроцессор 23 -i80386; арифметический сопроцессор 22 -i80387; контроллер прерываний 26 - i8259 или их аналоги, выпускаемые отечественной промышленностью.
Приемники спутниковых сигналов 5, 6, 16, 17, могут быть выполнены в соответствии с рис. 1.14 [3]. Реализации отдельных блоков аппаратуры, входящей в контрольно-корректирующую станцию 2 и подвижную станцию 11 описаны, например, в [1, 3].
Рассмотрим числовой пример.
Пусть измерение угловой ориентации объекта проводится по сигналам 9 НКА систем ГЛОНАСС и GPS. Расстояние между антеннами 13 и 14 объекта составляет 5 м, среднеквадратическая погрешность измерения фазового сдвига (фазовый шум) сигналов НКА составляет ≈0,01 фазового цикла или 4o. При моделировании для заданной геометрии расположения НКА была получена случайная погрешность определения угловой ориентации равная: по азимуту -0,707', по углу места -1,161'.
Влияние ионосферной погрешности моделировалось изменением угла места вектора-направления линии визирования НКА ΔΨумi по следующей формуле:
ΔΨумi = ΔΨm•cos(Ψумi),
где ΔΨm - максимальное отклонение угла места линии визирования НКА; Ψумi - истинное значение угла места линии визирования НКА, полученное по известным координатам НКА и объекта.
При ΔΨm = 1° дополнительная погрешность измерения фазового сдвига для сигналов разных НКА достигает 25o, что приводит к дополнительной погрешности измерения азимута 0,615', а угла места - 2,047', т.е. составляет величину, сравнимую со случайной погрешностью определения угловой ориентации.
Применение алгоритма коррекции направляющих косинусов направлений от объекта до каждого из НКА приведет к полному исключению дополнительной погрешности, обусловленной влиянием среды прохождения радиосигналов, что в 2-3 раза уменьшит погрешность определения угловой ориентации объекта.
Литература
1. B. C. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др. Сетевые спутниковые радионавигационные системы / Под ред. B.C. Шебшаевича. - М.: Радио и связь, 1993.
2. Патент РФ 2122217. Опубл. 1998. БИ 32.
3. Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. В. Н. Харисова, А.И. Перова, В.А. Болдина. - 2-е изд. исправ. - М.: ИПРЖР, 1999. - 560 с.: ил.
4. Брамм П., Брамм Д. Микропроцессор 80386 и его программирование: Пер. с англ. - М.: Мир, 1990. - 448 с., ил.
5. Попов В. Н. , Ворковастов К.С., Столчнев В.Г. и др. Маркшейдерские работы на карьерах и приисках: Справочник. - М.: Недра, 1989. - 424 с.; ил.
Изобретение относится к спутниковой навигации и может использоваться в измерительных средствах определения пространственной ориентации. Технический результат заключается в повышении точности определения угловой ориентации при наличии погрешностей, обусловленных влиянием среды прохождения радиосигналов. Для этого в способе принимают сигналы навигационных космических аппаратов, по меньшей мере, в двух точках образующих базовые линии с известной угловой ориентацией. По известным базовым линиям определяют поправки к коэффициентам системы управления для определения угловой ориентации, которые передают на борт объекта. Полученные поправки используются для коррекции коэффициентов, измеренных объектом. 5 ил.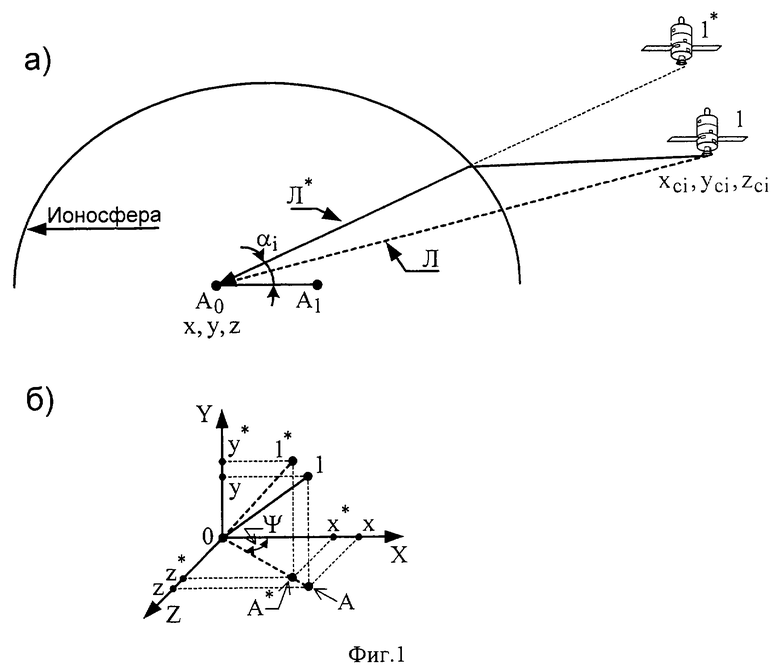
Способ угловой ориентации объекта по сигналам навигационных космических аппаратов, основанный на приеме сигналов от n навигационных космических аппаратов двумя или более антенно-приемными устройствами, расположенными параллельно одной или двум осям объекта, определении набега фаз за интервал времени измерения, отличающийся тем, что дополнительно принимают сигналы навигационных космических аппаратов, по крайней мере, в двух известных точках контрольно-корректирующей станции, образующих базовые линии с известной угловой ориентацией, определяют эталонные значения направляющих косинусов направлений на навигационные космические аппараты по известным координатам контрольно-корректирующей станции и навигационных космических аппаратов, а также поправки к полученным значениям направляющих косинусов направлений на навигационные космические аппараты, излучают сигналы с информацией о поправках к значениям направляющих косинусов направлений на навигационные космические аппараты, принимают на объекте сигналы контрольно-корректирующей станции и определяют угловую ориентацию объекта по набегу фаз сигналов, принятых антеннами объекта от навигационных космических аппаратов, и поправкам к направляющим косинусам направлений на навигационные космические аппараты, принятым от контрольно-корректирующей станции.
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСОВОГО УГЛА И КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 1992 |
|
RU2022294C1 |
| ШЕБШАЕВИЧ B.C | |||
| и др | |||
| Сетевые спутниковые радионавигационные системы | |||
| - М.: Радио и связь, 1993, с.285-290 | |||
| Глобальная спутниковая радионавигационная Система ГЛОНАСС/Под ред | |||
| ХАРИСОВА В.Н | |||
| и др | |||
| - М.: ИПРЖР, 1999, с.245-257. | |||

