Настоящее изобретение относится к устройствам для исследования и определения координат подводных объектов.
Изобретение может быть использовано при подводно-технических работах, промерах, поиске и идентификации подводных объектов, в морских археологических исследованиях и т.д.
Известно устройство эхолот, содержащее последовательно соединенные микроконтроллер, передатчик, приемник и аналого-цифровой преобразователь, выход которого соединен с микроконтроллером, а также электроакустический преобразователь, подключенный к передатчику и приемнику, дисплей, вход которого подключен к микроконтроллеру, блок временной автоматической регулировки усиления, вход которого соединен с микроконтроллером, а передатчик выполнен со ступенчатой регулировкой мощности, вход регулировки которой подключен к микроконтроллеру, приемник выполнен с двумя входами регулировки усиления, первый вход регулировки, обеспечивающий ступенчатую регулировку усиления, подключен к микроконтроллеру, а второй вход регулировки подключен к выходу блока временной автоматической регулировки усиления [1].
Недостатками данного устройства являются возможность измерения координат только одной точки под водой и повышенная погрешность измерения глубины из-за невозможности определения бортовой и килевой качки судна в процессе измерений.
Известно также устройство для определения координат исполнительного механизма надводного объекта, содержащее n навигационных спутников, контрольно-корректирующую станцию, включающую последовательно соединенные первую приемную антенну, первый приемник спутниковых сигналов, вычислитель поправок, предназначенный для выработки значений поправок радионавигационных параметров по каждому из навигационных спутников, первый модулятор, передатчик корректирующей информации и первую передающую антенну, вычислитель эталонных значений радионавигационных параметров на основе эталонных координат фазового центра первой приемной антенны и эфемерид каждого из навигационных спутников, соединенный со вторым входом вычислителя поправок, буйковую станцию, включающую последовательно соединенные вторую приемную антенну, второй приемник спутниковых сигналов, второй модулятор, передатчик и вторую передающую антенну, и надводную подвижную станцию, включающую последовательно соединенные приемную антенну корректирующей информации, приемник корректирующей информации и демодулятор, третью приемную антенну спутниковых сигналов и третий приемник спутниковых сигналов, четвертую приемную антенну спутниковых сигналов и четвертый приемник спутниковых сигналов, вычислительный блок, предназначенный для вычисления координат объектов в горизонтальной системе координат и их глубины по отношению к уровню воды и соединенный с ним блок управления и индикации так, что его управляющий выход является одним из входов, а информационный вход - первым из выходов указанного вычислительного блока, при этом выходы демодулятора, третьего и четвертого приемников спутниковых сигналов соединены соответственно с вторым, третьим и четвертым входами указанного вычислительного блока [2].
Недостатком известного устройства, принятого в качестве прототипа устройства для определения координат подводных объектов, является невозможность определения координат более одной точки под водой и пониженная точность из-за невозможности измерения параметров бортовой качки судна.
В основу изобретения положена задача повышения точности определения координат подводных объектов.
Поставленная задача решается тем, что в устройстве для определения координат подводных объектов, содержащем n навигационных спутников, контрольно-корректирующую станцию, включающую последовательно соединенные первую приемную антенну, первый приемник спутниковых сигналов, указанный вычислитель поправок, первый модулятор, передатчик корректирующей информации и первую передающую антенну, указанный вычислитель эталонных значений радионавигационных параметров, соединенный со вторым входом указанного вычислителя поправок, буйковую станцию, включающую последовательно соединенные вторую приемную антенну, второй приемник спутниковых сигналов, второй модулятор, передатчик и вторую передающую антенну, и надводную подвижную станцию, включающую последовательно соединенные приемную антенну корректирующей информации, приемник корректирующей информации и демодулятор, третью приемную антенну спутниковых сигналов и третий приемник спутниковых сигналов, четвертую приемную антенну спутниковых сигналов и четвертый приемник спутниковых сигналов, указанный вычислительный блок и соединенный с ним блок управления и индикации так, что его управляющий выход является одним из входов, а информационный вход - первым из выходов указанного вычислительного блока, при этом выходы демодулятора, третьего и четвертого приемников спутниковых сигналов соединены соответственно с вторым, третьим и четвертым входами указанного вычислительного блока, согласно изобретению надводная подвижная станция дополнительно содержит формирователь синхронизирующих сигналов, передатчик, первый и второй антенные переключатели, первый и второй приемники отраженных сигналов, приемопередающую и приемную антенны акустических сигналов и последовательно соединенные пятую приемную антенны спутниковых сигналов и пятый приемник спутниковых сигналов, который первым выходом соединен с пятым входом указанного вычислительного блока, второй выход указанного вычислительного блока соединен с первым входом формирователя синхронизирующих сигналов, который вторым входом соединен со вторым выходом пятого приемника спутниковых сигналов, одним из выходов формирователь синхронизирующих сигналов соединен с первыми входами первого и второго приемников отраженных сигналов, вторым выходом соединен с первым входом второго антенного переключателя, третьим выходом соединен с первым входом первого антенного переключателя, а четвертым выходом формирователь синхронизирующих сигналов соединен со входом передатчика, выход которого соединен со вторым входом первого антенного переключателя, чей первый выход соединен с приемопередающей антенной акустических сигналов, а второй его выход соединен со вторым входом первого приемника отраженных сигналов, второй антенный переключатель вторым входом соединен с приемной антенной акустических сигналов, а выходом - со вторым входом второго приемника отраженных сигналов, при этом выходы первого и второго приемников отраженных сигналов являются соответственно шестым и седьмым входами указанного вычислительного блока.
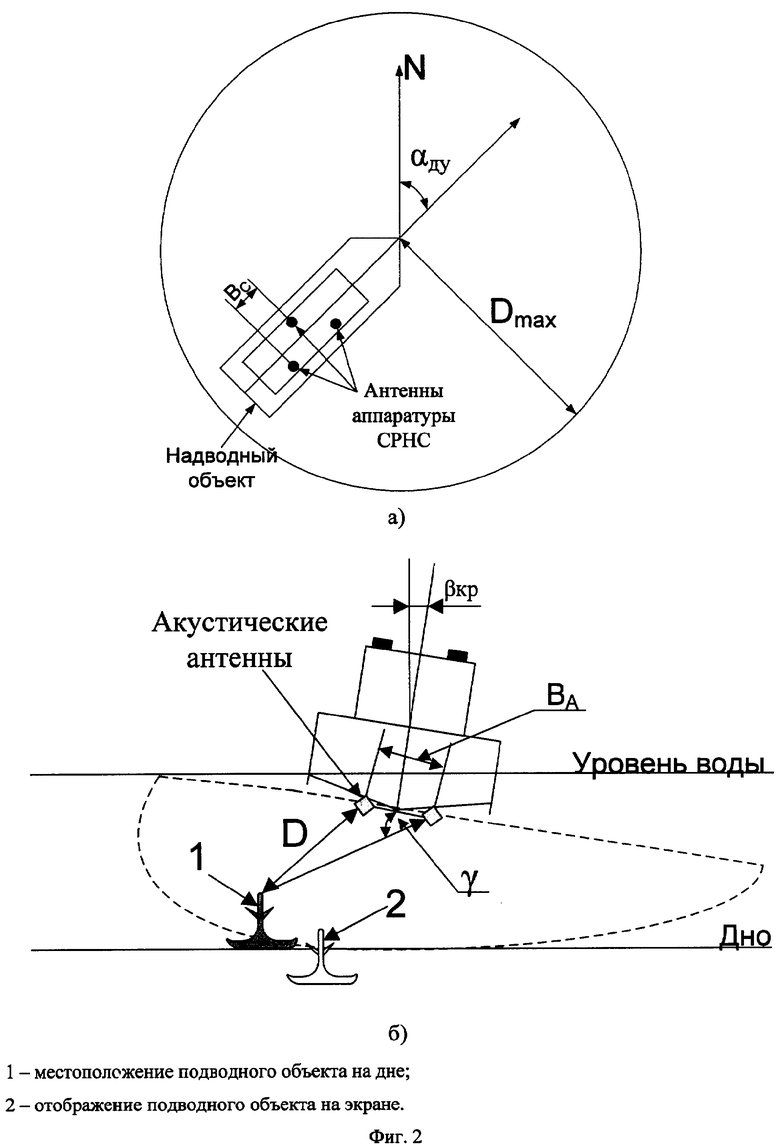
Изобретение поясняется прилагаемыми чертежами, на которых: на фиг.1 изображена структурная схема устройства для определения координат подводных объектов; на фиг.2 показана работа устройства при влиянии качки надводного объекта; на фиг.3 изображена схема варианта построения указанного вычислительного блока; на фиг.4 приведена блок-схема алгоритма работы указанного вычислительного блока.
Устройство для определения координат подводных объектов (фиг.1) содержит n навигационных спутников 11-1n, контрольно-корректирующую станцию 2, в которую входят последовательно соединенные первая приемная антенна 31, первый приемник спутниковых сигналов 41, указанный вычислитель поправок 5, первый модулятор 61, передатчик корректирующей информации 7 и передающая антенна 81, и указанный вычислитель эталонных значений радионавигационных параметров 9, соединенный со вторым входом указанного вычислителя поправок 5. В устройство для определения координат подводных объектов входит буйковая станция 10, содержащая последовательно соединенные вторую приемную антенну 32, второй приемник спутниковых сигналов 42, второй модулятор 62, передатчик 11 и вторую передающую антенну 82. Устройство для определения координат подводных объектов включает также надводную подвижную станцию 12, которая содержит последовательно соединенные приемную антенну 13 корректирующей информации, приемник 14 корректирующей информации и демодулятор 15, третью 33, четвертую 34 и пятую 35 приемные антенны спутниковых сигналов, соединенные с третьим 43, четвертым 44 и пятым 45 приемниками спутниковых сигналов соответственно, и формирователь синхронизирующих сигналов 16, входами соединенный с указанным вычислительным блоком 17 и с пятым приемником спутниковых сигналов. Формирователь синхронизирующих сигналов 16 одним из выходов соединен с передатчиком 18, вторым и третьим выходами - с одним из входов соответственно первого 191 и второго 192 антенных переключателей, а четвертым выходом соединен с одним из входов первого 201 и второго 202 приемников отраженных сигналов, вторые входы которых подключены к выходам соответственно первого 191 и второго 192 антенных переключателей. Выходы первого 201 и второго 202 приемников отраженных сигналов, демодулятора 15, четвертого 44 и третьего 43 приемников спутниковых сигналов и второй выход пятого 45 приемника спутниковых сигналов соединены с соответствующими входами указанного вычислительного блока 17, к которому подключен также блок управления и индикации 21. При этом первый антенный переключатель 191 соединен с приемопередающей антенной 22, а второй антенный переключатель 192 соединен с приемной антенной 23.
Устройство работает следующим образом.
Контрольно-корректирующая станция 2 первой антенной 31 принимает сигналы навигационных спутников 11-1n, определяет радионавигационные параметры  по каждому из спутников. С первого приемника спутниковых сигналов 41 измеренные значения радионавигационных параметров
по каждому из спутников. С первого приемника спутниковых сигналов 41 измеренные значения радионавигационных параметров
 поступают на вход указанного вычислителя поправок 5, второй вход которого соединен с указанным вычислителем эталонных значений радионавигационных параметров 9, определяющим эталонные значения радионавигационных параметров
поступают на вход указанного вычислителя поправок 5, второй вход которого соединен с указанным вычислителем эталонных значений радионавигационных параметров 9, определяющим эталонные значения радионавигационных параметров  на основе эталонных координат фазового центра первой антенны 31 ХКСЭ,YKCЭ,ZKCЭ и эфемерид Xэф1-Xэфn, Yэф1-Yэфn, Zэф1-Zэфn каждого из спутников. Указанный вычислитель поправок 5 вырабатывает значения поправок радионавигационных параметров по каждому из спутников в соответствии с [3]:
на основе эталонных координат фазового центра первой антенны 31 ХКСЭ,YKCЭ,ZKCЭ и эфемерид Xэф1-Xэфn, Yэф1-Yэфn, Zэф1-Zэфn каждого из спутников. Указанный вычислитель поправок 5 вырабатывает значения поправок радионавигационных параметров по каждому из спутников в соответствии с [3]:
 , где
, где
i=1, …, n - текущий номер спутника.
С выхода указанного вычислителя поправок 5 сигналы, в которых содержится информация о номере спутника, времени приема навигационного сигнала, поправках к радионавигационным параметрам до каждого спутника ΔR1-ΔRn, поступают на первый модулятор 61. С выхода первого модулятора 61 сигналы поступают в передатчик 7 корректирующей информации, где преобразуются, усиливаются и излучаются в пространство первой передающей антенной 81.
Одновременно с этим, сигналы спутников 11-1n принимаются второй приемной антенной 32, установленной на буйковой станции 10. Далее принятые сигналы поступают на вход второго приемника спутниковых сигналов 42, осуществляющего измерение радионавигационных параметров  по сигналам каждого из спутников. С выхода второго приемника спутниковых сигналов 42 сигналы, в которых содержится информация о номере спутника, времени приема навигационного сигнала, значениях измеренных радионавигационных параметров , поступают на вход второго модулятора 62. С выхода второго модулятора 62 сигналы поступают в передатчик 11, где преобразуются, усиливаются и излучаются в пространство второй передающей антенной 82.
по сигналам каждого из спутников. С выхода второго приемника спутниковых сигналов 42 сигналы, в которых содержится информация о номере спутника, времени приема навигационного сигнала, значениях измеренных радионавигационных параметров , поступают на вход второго модулятора 62. С выхода второго модулятора 62 сигналы поступают в передатчик 11, где преобразуются, усиливаются и излучаются в пространство второй передающей антенной 82.
Сигналы буйковой станции 10 и контрольно-корректирующей станции 2 принимаются антенной 13 надводного объекта, снабженного надводной подвижной станцией 12, поступают на вход приемника корректирующей информации 14, в котором происходит усиление, преобразование и выделение сигналов контрольно-корректирующей 2 и буйковой 10 станций. С выхода приемника корректирующей информации 14 сигналы поступают на вход демодулятора 15, выделяющего из сигналов информацию о номере спутника, времени приема сигнала и поправках радионавигационных параметров ΔR1-ΔRn, сформированных указанным вычислителем поправок 5 контрольно-корректирующей станции 2. Также демодулятором 15 выделяется информация о номерах спутников, времени приема сигналов и значениях радионавигационных параметров , измеренных вторым приемником спутниковых сигналов 42 буйковой станции 10. С выхода демодулятора 15 вышеперечисленные параметры поступают в указанный вычислительный блок 17.
Одновременно сигналы навигационных спутников 11-1n принимаются третьей 33, четвертой 34 и пятой 35 антеннами, подключенными соответственно к входу третьего 43, четвертого 44 и пятого 45 приемников спутниковых сигналов, производящих определение радионавигационных параметров  и
и  ,
,  .
.
С выхода третьего 43, четвертого 44, пятого 45 приемников спутниковых сигналов информация о номерах спутников, времени приема сигналов и значениях радионавигационных параметров и ,  поступает в указанный вычислительный блок 17.
поступает в указанный вычислительный блок 17.
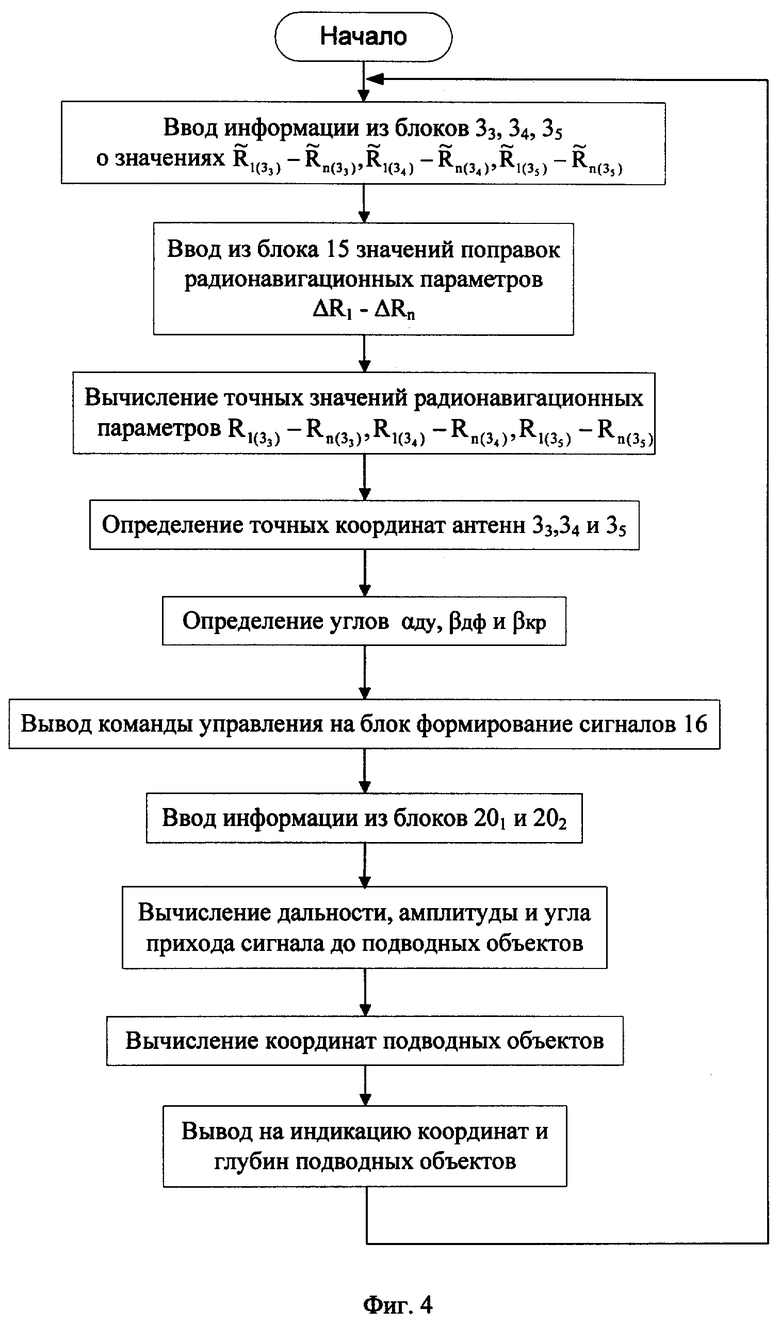
Указанный вычислительный блок 17 выполняет циклическую обработку вводимой информации в соответствии с блок-схемой алгоритма, приведенной на фиг.4.
После ввода информации из блоков 15, 43, 44 и 45 указанный вычислительный блок 17 выполняет коррекцию радионавигационных параметров и  , , измеренных третьим, четвертым и пятым приемниками спутниковых сигналов 43, 44 и 45 в соответствии с [3]:
, , измеренных третьим, четвертым и пятым приемниками спутниковых сигналов 43, 44 и 45 в соответствии с [3]:
В результате этой коррекции получают точные значения радионавигационных параметров  ,
,  и
и  , которые используют для вычисления точных координат приемных антенн 33, 34 и 35. В случае использования в качестве радионавигационных параметров результатов измерений псевдодальностей для определения координат антенн может быть использован алгоритм, приведенный, например, в [3].
, которые используют для вычисления точных координат приемных антенн 33, 34 и 35. В случае использования в качестве радионавигационных параметров результатов измерений псевдодальностей для определения координат антенн может быть использован алгоритм, приведенный, например, в [3].
Затем, аналогичным образом, в указанном вычислительном блоке 17 происходит обработка радионавигационных параметров  , измеренных буйковой станцией 10, после коррекции которых определяют ее координаты
, измеренных буйковой станцией 10, после коррекции которых определяют ее координаты  , служащие для контроля уровня воды.
, служащие для контроля уровня воды.
Антенны 33, 34 и 35 могут быть расположены на надводном объекте (судне), например, в вершинах треугольника (фиг.2а), что позволяет определить угол αду (угол между продольной осью надводного объекта и направлением на Север), βдф (дифферент надводного объекта, фиг.2б) и βкр (крен надводного объекта, аналогично фиг.2б) по разностям радионавигационных параметров  и
и  например, по алгоритму, приведенному на стр.206-208 в [3].
например, по алгоритму, приведенному на стр.206-208 в [3].
После вычислений точных координат и параметров ориентации надводного объекта αду, βдф и βкр, с указанного вычислительного блока 17 выдается управляющий сигнал на формирователь синхронизирующих сигналов 16.
Со второго выхода пятого приемника спутниковых сигналов 45 на вход формирователя синхронизирующих сигналов 16 поступает опорная частота, например, 10 МГц [3], из которой формируются необходимые сигналы с частотами, обеспечивающими синхронизацию и работу других блоков устройства.
Для обнаружения подводных объектов используется зондирующий акустический сигнал, параметры которого (вид сигнала, модуляция) задаются в указанном вычислительном блоке 17. Например, могут быть использованы сигналы с линейно-частотной модуляцией, что позволяет с высокой точностью определять задержку распространения сигналов до подводных объектов, повысить помехоустойчивость и разрешающую способность по дальности, определять однозначно фазу сигнала, без использования метода разрешения неоднозначности [4].
Далее зондирующий акустический сигнал с формирователя синхронизирующих сигналов 16 последовательно поступает в передатчик 18, где усиливается и через первый антенный переключатель 191 и приемопередающую антенну 22 акустических сигналов излучается в водное пространство. С формирователя синхронизирующих сигналов 16 на первый 191 и второй 192 антенные переключатели поступают управляющие импульсы, с помощью которых осуществляется переключение между положениями состояний «передача»/«прием». Частота следования импульсов определяется максимальной дальностью обнаружения подводных объектов.
Первый антенный переключатель 191 имеет два положения состояний. Первое положение «передача сигнала» - соединяются выход передатчика 18 и приемопередающая антенна акустических сигналов 22. Второе состояние «прием сигналов» - соединяются приемопередающая антенна акустических сигналов 22 с входом первого приемника отраженных сигналов 201. Второй антенный переключатель 192 в первом состоянии «прием сигналов» - соединяются приемная антенна акустических сигналов 23 и второй приемник отраженных сигналов 202, второе состояние «приема нет».
Сигнал, излучающийся в водное пространство приемопередающей антенной акустических сигналов 22, проходит расстояние D, достигает поверхности подводного объекта, отражается в обратном направлении, в том числе и в сторону антенн 22 и 23, через первый 191 и второй 192 антенные переключатели поступает на вход первого 201 и второго 202 приемников отраженных сигналов. В приемниках отраженных сигналов 201 и 202 происходит усиление принятых сигналов антеннами 22 и 23, демодуляция и измерение задержки, амплитуды и фазы сигналов, их преобразование в цифровой код и передача в указанный вычислительный блок 17.
В указанном вычислительном блоке 17 по задержке распространения сигнала до подводного объекта и обратно вычисляется удвоенная дальность D до подводного объекта. По разности фаз сигналов, получаемых от первого 201 и второго 202 приемников отраженных сигналов, определяется угол прихода сигналов γ. По значению амплитуды определяется отражающая способность подводного объекта.
Затем исходя из рассчитанных координат антенн 33 (либо 34, или 35) параметров ориентации надводного объекта αду, βдф и βкр, измеренной дальности до подводного объекта D, полученного угла прихода сигнала γ, а также исходя из полученного значения уровня воды, которое измеряется и передается буйковой станцией 10 НБ, вычисляются точные координаты подводных объектов ХПО и YПО в горизонтальной системе координат и глубина h подводного объекта по отношению к уровню воды (фиг.2):



где НБ - высотная координата буйковой станции 10.
Значения плановых координат подводного объекта ХПО и YПО и глубины h далее поступают в блок управления и индикации 21 для последующего отображения и регистрации. Длительность цикла работы устройства для определения координат подводных объектов выбирается таким образом, чтобы успевали выполняться формирование сигналов, прием, измерения, обработка, передача навигационной и измерительной информации.
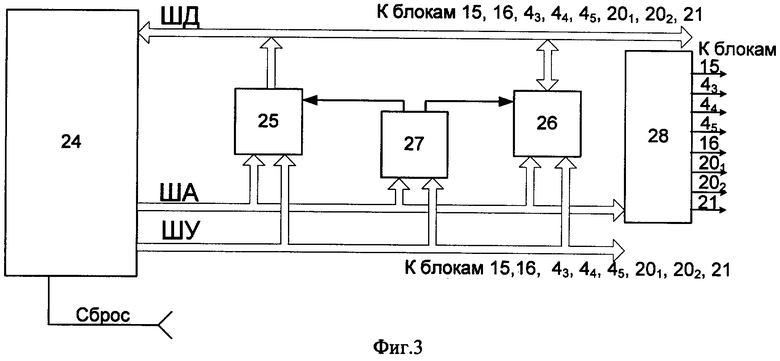
Указанный вычислительный блок 17 в связи с большим объемом вычислений необходимо реализовать на основе микропроцессора по типовой структуре, описанной, например, в [5]. На фиг.3 приведена структурная схема варианта указанного вычислительного блока, выполненного по схеме с разделением адресного пространства, включающего микропроцессорный блок 24, постоянное 25 и оперативноое 26 запоминающие устройства, первый дешифратор адреса 27, обеспечивающий выбор постоянного или оперативного запоминающего устройства, второй дешифратор адреса 28, позволяющий выбрать одно из подключенных к указанному вычислительному блоку 17 внешних устройств: демодулятор 15, третий приемник спутниковых сигналов 43, четвертый приемник спутниковых сигналов 44, пятый приемник спутниковых сигналов 45, формирователь синхронизирующих сигналов 16, первый 201 и второй 202 приемники отраженных сигналов или блок управления и индикации 21. В постоянном запоминающем устройстве 25 находится программа обработки, реализующая алгоритм, приведенный на фиг.4, а также константы и другая необходимая информация. Оперативное запоминающее устройство 26 содержит текущие данные, приходящие с блоков 15, 43, 44, 45, 201, 202, 21, а также информацию, необходимую для обмена с блоком управления и индикации 21, и текущие промежуточные результаты вычислений. Дешифраторы адреса 27 и 28 обеспечивают выбор нужного в данный момент элемента, например оперативного 26 или постоянного 25 запоминающих устройств, либо одного из внешних блоков, имеющих свой фиксированный адрес. Микропроцессорный модуль 24 управляет работой указанного вычислительного блока 17, обеспечивая обработку и обмен информацией в соответствии с блок-схемой алгоритма работы, приведенной на фиг.4, и связан с блоками 15, 43, 44, 45, 16, 201, 202, 21 информационной шиной данных (ШД), шиной адреса (ША) и шиной управления (ШУ).
Блок управления и индикации 21 может состоять из клавиатуры и дисплея. Клавиатура используется для ввода исходных данных в вычислительный блок 17 и может быть реализована согласно рис.11.24 [6]. Дисплей служит для отображения информации, поступающей из вычислительного блока 17, и может быть реализован в соответствии с рис.11.21 [6].
При реализации указанного вычислительного блока 17 на базе микропроцессора K580 микропроцессорный модуль состоит из шести больших интегральных микросхем: центрального процессора K580 ВМ80, системного контроллера K580 ВК88, тактового генератора К580ГФ24, таймера K1810ВИ54, контроллера прямого доступа к памяти K580ВТ57, контроллера прерывания K1810ВН59А.
Приемники спутниковых сигналов 41, …, 45 могут быть выполнены в соответствии с рис.1.14 [7], рис.38 [8]. Реализации отдельных блоков аппаратуры, расположенной на надводном объекте, буйковой 10 и контрольно-корректирующей 2 станций приведены, например, на рис.20.3 [3], [9].
Формирователь синхронизирующих сигналов 16 может быть построен на базе четырехканального цифрового синтезатора частоты с прямым синтезом, который управляется указанным вычислительным блоком 17 и может быть построен в соответствии с рис.3 [10]. При этом на двух выходах формирователя синхронизирующих сигналов 16 выдаются сигналы в аналоговом виде, а на двух других выходах - импульсные сигналы.
Передатчик 18 выполняет функцию усилителя, который может быть выполнен в соответствии с рис.3.1 [12].
Антенные переключатели 191 и 192 могут быть выполнены по схеме рис.8.45 [11].
Приемопередающая 22 и приемная 23 антенны акустических сигналов могут быть выполнены по рис.5.33 [13].
Первый 201 и второй 202 приемники отраженных сигналов могут быть выполнены в соответствии с рис.1.14 [7]. На выходах приемников 201 и 202 формируются задержка сигнала, его амплитуда и фаза, которые в цифровом виде поступают на указанный вычислительный блок 17.
Рассмотрим пример применения предлагаемого устройства для обнаружения подводных объектов.
Пусть в качестве навигационных спутников используются, например, спутники систем ГЛОНАСС/GPS. Тогда одновременный прием сигналов в точках 31, 33, 34, 35 позволяет определить координаты объекта и контрольно-корректирующей станции 2. Если считать координаты контрольно-корректирующей станции 2 известными, например, с погрешностью в единицы сантиметров, то по ее сигналам путем коррекции радионавигационных параметров координаты точек 33, 34, 35 также будут определены с погрешностью несколько сантиметров, обусловленной погрешностью задания координат контрольно-корректирующей станции 2.
При этом аппаратурная погрешность измерений фазовых сдвигов на несущих частотах системы ГЛОНАСС в диапазоне частот 1600 МГц составит ΔφC≈0.01 ф.ц. (<4°). Погрешность определения углов αду, βдф, βкр может быть определена по приближенной формуле:
 ,
,
где λ - длина волны принятых сигналов, для несущей, равной ~1600 МГц, составляет 0.1875 м;
Вс - расстояние между антеннами 33 и 34 или 33 и 35, расположенными на борту подвижного надводного объекта, например на крыше командной рубки.
При Вс=5 м погрешность измерения дирекционного угла, крена и дифферента надводного объекта составит σгл≈1.5 угловых минут.
Для обнаружения подводных объектов могут быть применены, например, зондирующие сигналы с центральной частотой 500 кГц. При этом длина волны λ на данной частоте будет равна около 3 миллиметров. Для однозначного определения фазы сигнала, отраженного от подводных объектов, необходимо применить, например, линейно-частотную модуляцию с девиацией частоты 250 кГц. Аппаратурная погрешность измерения разности фаз отраженных сигналов составит ΔφА≈0.01 ф.ц., при условии, что расстояние между приемопередающей 22 и приемной 23 антеннами акустических сигналов ВА=0.1 м, то в соответствии с формулой  , погрешность определения прихода сигналов приближенно составит десятки угловых минут.
, погрешность определения прихода сигналов приближенно составит десятки угловых минут.
При значениях углов αду=45, βдф=10, βкр=3, γ=45 в градусах, измеренной дальности до подводного объекта D=10 м и погрешностях определения ориентации надводного объекта σαду=σβдф=σβкр=σгл, угла прихода акустического сигнала σγ=0.5 градуса, погрешность определения наклонной дальности, в соответствии с геометрическими построениями, составит σD=0.1 м, а погрешность определения относительных координат подводного объекта σХ=0.04 м, σY=0.04 м, глубины σd=0.02 м.
С учетом погрешности определения координат точки 31 контрольно-корректирующей станции 2 и буйковой станции 10 погрешность определения абсолютных координат и глубины подводного объекта составит десятки сантиметров.
Таким образом, благодаря применению высокоточных методов определения ориентации подвижного надводного объекта в пространстве и методов измерения относительного местоположения подводных объектов возможно применять предлагаемое устройство для определения координат подводных объектов.
Литература
1. Патент РФ №2241242 Эхолот. Бородин A.M. Опубл. БИ №7 2004.11.27.
2. Патент РФ №2152049 Устройство для определения координат исполнительного механизма надводного объекта. Алешечкин A.M. Кокорин В.И. / Опубл. БИ №7. 2000.06.27.
3. Сетевые спутниковые радионавигационные системы. Под ред. B.C.Шебшаевича, Москва, Радио связь, 1993, с.288.
4. Б.Скляр. Цифровая связь. Теоретические основы и практическое применение. Изд. 2-е, испр.: Пер. с анг. - М.: Издательский дом «Вильяме», 2003 - 1104 с.: ил.
5. Балашов Е.П., Пузенков Д.В. Микропроцессоры и микропроцессорные системы, М., Радио и связь, 1990, с.203.
6. Брей Б. Микропроцессоры Intel: 8086/8088, 80186/80188, 80286, 80386, 80486, Pentium, Pentium Pro Processor, Pentium II, Pentium III, Pentium 4. Архитектура, программирование и интерфейсы. Шестое издание: Пер с анг. - СПб.: БХВ-Петербург, 2005. - 1328 с.: ил.
7. Цифровые радиоприемные системы. Под ред. М.И.Жодзишского М., Радио и связь, 1990.
8. Бортовые устройства спутниковой навигации. Под ред. В.С.Шебшаевича. М., Транспорт, 1988.
9. Агафонников A.M. Фазовые радиогеодезические системы для морских исследований. М., Наука, 1979.
10. Ридико Л. DDS: прямой цифровой синтез частоты. - Компоненты и технологии, 2001, №7, с.50-54.
11. Точи Р., Уидмер Дж., Нил С. Цифровые системы. Теория и практика, 8е издание. М.: Издательский дом «Вильяме» 2004.
12. Усилительные устройства. Г.С.Цикин. 4ое издание. М.: Связь 1971. 367 стр.
13. Боббер Р.Дж. Гидроакустические измерения. 1974, 359 стр.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НАДВОДНОГО ОБЪЕКТА | 1999 |
|
RU2152049C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБСЛЕДОВАНИЯ ОБЪЕКТОВ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ | 2012 |
|
RU2495375C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2001 |
|
RU2219084C2 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2004 |
|
RU2265543C2 |
| НАВИГАЦИОННОЕ КОНТРОЛЬНО-УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ЛОКОМОТИВОВ-РЕЛЬСОСМАЗЫВАТЕЛЕЙ | 2009 |
|
RU2394716C1 |
| УСТРОЙСТВО ОПОВЕЩЕНИЯ РЕМОНТНЫХ БРИГАД | 2003 |
|
RU2268836C2 |
| СИСТЕМА ДЛЯ СОЗДАНИЯ БАЗЫ ДАННЫХ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2195408C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1997 |
|
RU2139215C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ | 1996 |
|
RU2131132C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
Изобретение относится к устройствам определения координат объектов и может быть применено при выполнении подводно-технических работ, промерах, поиске и идентификации подводных объектов. Достигаемым техническим результатом является повышение точности определения координат подводных объектов. Результат достигается введением в подвижную станцию дополнительной антенны, приемника спутниковых сигналов, формирователя синхронизирующих сигналов, передатчика, двух переключателей, двух приемников отраженных сигналов, приемопередающей и приемной антенн акустических сигналов. Приемник спутниковых сигналов позволяет измерять бортовую и килевую качки судна, что обеспечивает уменьшение погрешности определения координат подводных объектов. Все сигналы устройства формируются из высокостабильной опорной частоты, сформированной приемником спутниковых сигналов. Направление прихода отраженных сигналов определяется интерферометрическим методом. Предложенное устройство обеспечивает определение координат подводных объектов с погрешностью не более десятых долей метра. 4 ил.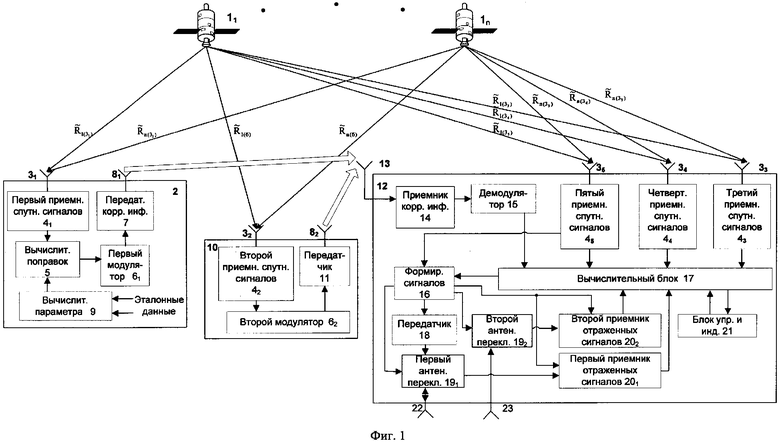
Устройство для определения координат подводных объектов, содержащее n навигационных спутников, контрольно-корректирующую станцию, включающую последовательно соединенные первую приемную антенну, первый приемник спутниковых сигналов, вычислитель поправок, предназначенный для выработки значений радионавигационных параметров по каждому из навигационных спутников, первый модулятор, передатчик корректирующей информации и первую передающую антенну, вычислитель эталонных значений радионавигационных параметров на основе эталонных координат фазового центра приемной антенны и эфемерид каждого из навигационных спутников, соединенный со вторым входом указанного вычислителя поправок, буйковую станцию, включающую последовательно соединенные вторую приемную антенну, второй приемник спутниковых сигналов, второй модулятор, передатчик и вторую передающую антенну, и надводную подвижную станцию, включающую последовательно соединенные приемную антенну корректирующей информации, приемник корректирующей информации и демодулятор, третью приемную антенну спутниковых сигналов и третий приемник спутниковых сигналов, четвертую приемную антенну спутниковых сигналов и четвертый приемник спутниковых сигналов, вычислительный блок, предназначенный для вычисления координат подводных объектов в горизонтальной системе координат и их глубины по отношению к уровню воды, и соединенный с ним блок управления и индикации таким образом, что его управляющий выход является одним из входов, а информационный вход - первым из выходов указанного вычислительного блока, при этом выходы демодулятора, третьего и четвертого приемников спутниковых сигналов соединены соответственно с вторым, третьим и четвертым входами указанного вычислительного блока, отличающееся тем, что в надводную подвижную станцию введены формирователь синхронизирующих сигналов, передатчик, первый и второй антенные переключатели, первый и второй приемники отраженных сигналов, приемопередающая и приемная антенны акустических сигналов и последовательно соединенные пятая приемная антенна спутниковых сигналов и пятый приемник спутниковых сигналов, который первым выходом соединен с пятым входом указанного вычислительного блока, второй выход указанного вычислительного блока соединен с первым входом формирователя синхронизирующих сигналов, который вторым входом соединен со вторым выходом пятого приемника спутниковых сигналов, одним из выходов формирователь синхронизирующих сигналов соединен с первыми входами первого и второго приемников отраженных сигналов, вторым выходом соединен с первым входом второго антенного переключателя, третьим выходом соединен с первым входом первого антенного переключателя, а четвертым выходом формирователь синхронизирующих сигналов соединен с входом передатчика, выход которого соединен с вторым входом первого антенного переключателя, первый выход которого соединен с приемопередающей антенной акустических сигналов, а второй его выход соединен с вторым входом первого приемника отраженных сигналов, второй антенный переключатель вторым входом соединен с приемной антенной акустических сигналов, а выходом - с вторым входом второго приемника отраженных сигналов, при этом выходы первого и второго приемников отраженных сигналов являются соответственно шестым и седьмым входами указанного вычислительного блока.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НАДВОДНОГО ОБЪЕКТА | 1999 |
|
RU2152049C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU1829578C |
| RU 2004124358 A, 27.01.2006 | |||
| СПОСОБ И УСТРОЙСТВО КОРРЕКЦИИ КООРДИНАТ В ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЕ НАВИГАЦИИ | 1994 |
|
RU2106657C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2101730C1 |
| US 7315485 B1, 01.01.2008 | |||
| СИНТАКСИЧЕСКАЯ СТРУКТУРА ПАРАМЕТРОВ ГИПОТЕТИЧЕСКОГО ЭТАЛОННОГО ДЕКОДЕРА | 2013 |
|
RU2643463C2 |
| JP 1018569 A, 14.07.1998 | |||
| УСТРОЙСТВО ДЛЯ ПОДЗЕМНОЙ РАЗРАБОТКИ ГРУНТА И СПОСОБ РЕГУЛИРОВАНИЯ ВНУТРЕННЕГО ДАВЛЕНИЯ В ЕГО ПЕРЕДАТОЧНОМ МЕХАНИЗМЕ | 2004 |
|
RU2292424C2 |

