Изобретение относится к устройствам для ориентирования объекта, установленного на первой плоскости по отношению ко второй плоскости и для вращения объекта в первой плоскости, оно содержит совокупность из трех взаимосвязанных корпусов, которая с одной стороны, соединена с верхней плоскостью и с другой стороны - со второй плоскостью, а также имеет три существенно непараллельных оси (вращения) и приводы для вращения по крайней мере части указанных корпусов.
Устройство такого типа известно из EP-B 0155922. Этот патент относится к устройству для удержания опоры радарной антенны в горизонтальном положении и для вращения антенны в определенном азимутальном направлении.
В известном устройстве объект вращается в первой плоскости с помощью четвертого корпуса, расположенного в центре устройства, причем указанный четвертый корпус приспособлен для обеспечения связи вращений в первой и второй плоскостях. Упомянутый четвертый корпус вместе со вспомогательными устройствами занимает центральную часть системы, что затрудняет проводку средств коммуникации, например кабелей и гибких волноводов, внутри этого корпуса. Более того, это делает конструкцию в целом весьма сложной.
Устройство согласно данному изобретению свободно от этих недостатков. Оно содержит систему из трех корпусов, имеющих в основном кольцевую форму, причем первая плоскость закреплена на верхней поверхности первог7о корпуса, верхняя поверхность второго корпуса закреплена на нижней поверхности первого корпуса, верхняя поверхность третьего корпуса прикреплена к нижней поверхности второго корпуса, а вторая плоскость закреплена на нижней поверхности третьего корпуса, причем каждый корпус снабжен индивидуальным приводом для вращения элемента, образующего верхнюю поверхность корпуса относительно его нижней поверхности, средство контроля предусмотрено для одновременного управления парой корпусов с целью ориентирования первой плоскости по отношению ко второй плоскости и для управления третьим корпусом с целью вращения объекта в первой плоскости и компенсации таким образом вращений, индуцированных упомянутой парой корпусов.
Из FR-A 2562459 известна рука работа, в которой несколько идентичных кольцевидных корпусов используется для перемещения руки. В этом устройстве все корпуса смонтированы на одном корпусе и поэтому вращаются вместе с этим корпусом.
Один из преимущественных вариантов данного изобретения характеризуется тем, что упомянутые корпуса в основном идентичны. Специальный вариант изобретения характеризуется тем, что оно снабжено приводом для каждого корпуса, каждый привод имеет двигатель, связанный со средством управления, зубчатую передачу и индикатор угла, подключенный к средству управления, причем указанный индикатор приспособлен для измерения угла поворота элемента, образующего верхнюю поверхность от заданного положения по отношению к нижней поверхности (корпуса).
Наиболее предпочтительный вариант средства управления характеризуется тем, что оно содержит модуль для определения по вектору  тест-сигнала, вектору
тест-сигнала, вектору  эталонного (опорного) сигнала и вектору
эталонного (опорного) сигнала и вектору  положения палубы вектора
положения палубы вектора  угловой погрешности, который состоит из угла δa погрешности азимута, угла δe погрешности возвышения и угла δr погрешности крена между системой координат; кроме того, средство управления имеет модуль для определения по вектору
угловой погрешности, который состоит из угла δa погрешности азимута, угла δe погрешности возвышения и угла δr погрешности крена между системой координат; кроме того, средство управления имеет модуль для определения по вектору  угловой погрешности вектора
угловой погрешности вектора  командного сигнала для привода трех корпусов.
командного сигнала для привода трех корпусов.
 определен через передаточные функции H1(s), H2(s) и H3(s) следующими соотношениями:
определен через передаточные функции H1(s), H2(s) и H3(s) следующими соотношениями:
u1(s) = H1(s)•δa(s)
u2(s) = H2(s)•δe(s)+H3(s)•δr(s)
u3(s) = H2(s)•δe(s)-H3(s)•δrs) ,
где
H1)s), H2(s) и H3(s) - передаточные функции по крайней мере первого порядка.
На фиг. 1 представлена совокупность трех корпусов с установленной на вершине антенной; на фиг. 2 - две системы координат, находящиеся в трехмерном вращении друг относительно друга с обозначением углов между ними; на фиг. 3: a - пример корпуса, выполненного в соответствии с данным изобретением; b - вид сверху корпуса в соответствии с данным изобретением; на фиг. 4 - схема сервомеханизма одного из возможных вариантов устройства; фиг. 5 второй, как предполагается наиболее предпочтительный вариант сервомеханизма устройства.
На фиг. 1 показано продольное сечение одного из возможных вариантов устройства согласно данному изобретению. Устройство предназначено для установки на палубе судна и служит для установки на нем антенны радара и равномерного вращения последней в горизонтальной плоскости независимо от движения судна. Показанное на фиг. 1 устройство закреплено на основании (палубе) 1 с помощью крепежного кольца 1. Нижний кольцевой корпус 2 зафиксирован на кольце 1. Элемент 4, образующий верхнюю поверхность корпуса 3, установлен с возможностью вращения на подшипнике 5, который закреплен в опорном кольце 6, установленном на нижнем кольцевом корпусе 3. Ось вращения N подшипника 5 образует угол β1 с нормалью Z основания (палубы). Промежуточный кольцевой корпус 7 установлен на элементе 4. Элемент 8, образующий верхнюю поверхность корпуса 7, установлен с возможностью вращения на подшипнике 9, который закреплен на опорном кольце 10, укрепленном на корпусе 7. Ось вращения L подшипника 9 отклонена от оси вращения N подшипника 5 на угол β2. В показанном на фиг. 1 примере углы β1 и β2 равны, хотя в других вариантах устройства они могут отличаться друг от друга.
Верхний кольцевой корпус 11 укреплен на элементе 8, а элемент 12 этого корпуса, образующий его верхнюю поверхность, установлен с возможностью вращения на подшипнике 13, закрепленном в опорном кольце 14, установленном на верхнем кольцевом корпусе 11. Ось вращения M подшипника 13 отклонена от оси вращения L подшипника 9 на угол β3 . В данном примере углы β3 и β2 одинаковы, хотя в других вариантах устройства они могут различными. Ориентируемый объект 15, например, антенна радара установлена на верхней поверхности элемента 12.
Вращая элементы 4, 8 и 12 в их подшипниках, можно не только придать оси вращения M подшипника 13 любое заданное направление относительно нормали Z (в пределах, необходимых для регулирования положения устройств), но и придать верхней поверхности элемента 12 любое желаемое угловое положение по отношению к оси вращения M. Таким образом возможно регулирование положение объекта 15. установленного на верхней поверхности элемента 12 в трех измерениях.
В другом варианте устройства элемент 4 кольцевого корпуса 3, элемент 8 промежуточного кольцевого корпуса 7 и элемент 12 верхнего кольцевого корпуса 11 приводятся во вращение с помощью зубчатых колес 16, 17 и 18 соответственно. При этом каждое из указанных зубчатых колес приводится во вращение от привода, вращающего ведущий вал с укрепленной на валу шестерней, находящейся в зацеплении с указанным зубчатым колесом, а приводы являются частью сервомеханизма. Приводы на данной фиг. не показаны.
В примере устройства, выполненного в соответствии с настоящим изобретением, приводы представляют собой электродвигатели, хотя в качестве таковых можно использовать приводы и других типов, например гидромоторы. Зубчатые колеса, связанные с элементами 4, 8, 12, можно использовать также для привода индикатора угла. Другая возможность - установка индикатора угла непосредственно на ведущем валу соответствующего привода или заделка индикатора угла во вращающиеся элементы 4, 8, 12, например установка кода Грея на обратной стороне этих элементов, а считывающего устройства - на корпусе под ними.
Индикаторы углов подключены также к сервомеханизму для регулировки положения элементов 4, 8, 12 с помощью приводов. Для определения углового положения предпочтительнее использовать цифровые оптические индикаторы угла, которые обеспечивают высокую точность и могут быть непосредственно подключены к сервомеханизму, который имеет обычно цифровую систему управления.
В одном из вариантов устройства в качестве привода используются шаговые двигатели, благодаря чему можно не использовать индикаторы углового положения. В шаговых двигателях угол поворота за один шаг точно дозирован, поэтому достаточно определить только начальное положение элементов 4, 8, 12, а для этой цели могут быть использованы механические или оптические коммутирующие элементы.
Устройство, выполненное в соответствии с данным изобретением, содержит корпус с вращающимся элементом, образующим его верхнюю поверхность. Имеется однако и другая возможность - создание одного или нескольких корпусов с вращающимися элементами, образующими нижнюю поверхность этих корпусов. В других возможных вариантах вращающиеся верхний и нижний элементы одного или более корпусов могут быть соединены с другими корпусами, закрепляемыми соответственно на верхнем или нижнем элементах. При этом необходимо соблюдать единственное условие, чтобы смежные корпуса могли вращаться один относительно другого вокруг оси, перпендикулярной соединяемым элементам, один из которых образует верхнюю поверхность одного, а другой - нижнюю поверхность другого корпуса.
Устройство, представляющее собой специальный вариант данного изобретения, содержит сервоконтур, который сводит к минимуму так называемые погрешности углов азимута, возвышения или крена верхней поверхности устройства по отношению к фиксированной или подвижной эталонной системе координат, причем достигается это корректированным комбинированным регулированием приводов.
Хорошо известен способ определения угловой погрешности путем установки гироскопа на верхний элемент 12. Преимущество такого способа в его простоте. Однако он обладает и значительными недостатками, в частности, его применение связано со значительным увеличением стоимости и требует дополнительных мер при проектировании.
Более совершенный способ определения угловой погрешности рассмотрен ниже. Он основан на использовании формул преобразования систем координат.
Во-первых, вводятся следующие, зависящие от времени векторы ,
, ,
,
где - вектор сигнала привода,
- вектор сигнала привода, - вектор командного сигнала,
- вектор командного сигнала, - вектор погрешности угла,
- вектор погрешности угла, - вектор тест-сигнала,
- вектор тест-сигнала, - вектор эталонного сигнала,
- вектор эталонного сигнала, - вектор положения основания (палубы),
- вектор положения основания (палубы), - вектор требуемого угла.
- вектор требуемого угла.
Вектор сигнала привода  включает сигнал привода u1 для управления приводом, вращающим элемент 4 нижнего корпуса 3, сигнал привода u2 для управления приводом, вращающим элемент 8 промежуточного корпуса 7, и сигнал привода u3 для управления приводом, вращающим элемент 12 верхнего корпуса 11, причем указанные сигналы привода пропорциональны крутящим моментам, развиваемым соответствующими приводами.
включает сигнал привода u1 для управления приводом, вращающим элемент 4 нижнего корпуса 3, сигнал привода u2 для управления приводом, вращающим элемент 8 промежуточного корпуса 7, и сигнал привода u3 для управления приводом, вращающим элемент 12 верхнего корпуса 11, причем указанные сигналы привода пропорциональны крутящим моментам, развиваемым соответствующими приводами.
Вектор командного сигнала  включает сигнал ra контроля азимута, сигнал re контроля угла возвышения и сигнал rr контроля крена. Путем нескольких арифметических операций вектор командного сигнала преобразуется в вектор сигнала привода.
включает сигнал ra контроля азимута, сигнал re контроля угла возвышения и сигнал rr контроля крена. Путем нескольких арифметических операций вектор командного сигнала преобразуется в вектор сигнала привода.
Вектор  тест-сигнала включает измеренный угловой поворот ϕ1 , отсчитываемый от заданного положения вращающегося элемента 4 нижнего корпуса т3, угловой поворот ϕ2 , отсчитываемый от заданного положения вращающегося элемента 8 промежуточного корпуса 7, и измеренный угловой поворот ϕ3 от заданного положения вращающегося элемента 12 верхнего корпуса 11.
тест-сигнала включает измеренный угловой поворот ϕ1 , отсчитываемый от заданного положения вращающегося элемента 4 нижнего корпуса т3, угловой поворот ϕ2 , отсчитываемый от заданного положения вращающегося элемента 8 промежуточного корпуса 7, и измеренный угловой поворот ϕ3 от заданного положения вращающегося элемента 12 верхнего корпуса 11.
Вектор  эталонного сигнала включает три эталонных сигнала, а именно: азимутальный угол ϑa , угол возвышения ϑe и угол крена ϑr между требуемой системой координат и зафиксированной на земле эталонной системой координат.
эталонного сигнала включает три эталонных сигнала, а именно: азимутальный угол ϑa , угол возвышения ϑe и угол крена ϑr между требуемой системой координат и зафиксированной на земле эталонной системой координат.
Вектор положения основания (палубы)  включает азимутальный угол ψa , угол возвышения ψe и угол крена ψr системы координат, связанной с основанием (палубой), на котором устройство закреплено по отношению к эталонной системе координат.
включает азимутальный угол ψa , угол возвышения ψe и угол крена ψr системы координат, связанной с основанием (палубой), на котором устройство закреплено по отношению к эталонной системе координат.
Вектор  погрешности угла включает погрешность δa угла азимута, погрешность δe угла возвышения и погрешность δr угла крена между системой координат, связанной с ориентируемым объектом и требуемой системой координат
погрешности угла включает погрешность δa угла азимута, погрешность δe угла возвышения и погрешность δr угла крена между системой координат, связанной с ориентируемым объектом и требуемой системой координат
Вектор  требуемого угла включает требуемые величины
требуемого угла включает требуемые величины  .
.
На фиг. 2 представлены две системы координат, которые служат для точного определения трех углов, определяющих положение тела, например, ориентируемого объекта относительно некоторого эталона, которым может быть палуба судна, закрепленное на земле тело или требуемое положение объекта. Система координат XYZ названа эталонной системой, а система координат X'Y'Z' относится к телу (объекту) и жестко соединена с ним. Каждая система координат определяется тремя главными векторами, например система XYZ векторами.
 .
.
Эти векторы имеют единичную длину и расположены под прямым углом друг к другу, образуя систему "по часовой стрелке". На фиг. 2 представлено три угла ϑ1,ϑ2 и ϑ3 , которые определяют положение упомянутого тела (объекта) относительно эталона. Эти углы названы: ϑa - угол азимута; ϑe - угол возвышения; ϑr - угол крена.
ϑa,ϑe и ϑr выбраны таким образом, что если систему координат XYZ поворачивать так, чтобы ось X была направлена по оси X', ось Y - по оси Y', ось Z по оси Z', то это может быть достигнуто первым поворотом осей X и Y по стрелке вокруг оси Z, если смотреть в направлении этой оси на азимутальный угол ϑa , затем поворачивают оси X и Z вокруг оси Y против часовой стрелки, если смотреть в направлении оси Y на угол возвышения ϑe и наконец поворачивают оси Y и Z по часовой стрелке вокруг оси X, если смотреть по направлению это оси на угол крена ϑr .
Этим способом можно установить связь между ортогональной системой " по часовой стрелке"  , относящейся к системе координат X'Y'Z', и системой E. Как известно, эта операция может быть выражена как произведение E на некоторую роторную матрицу R(ϑr,ϑe,ϑa), , которая является функцией трех роторных матриц Ra(ϑa),Re(ϑe),Rr(ϑr). . При данных ϑa,ϑe,ϑr это может быть выражено следующим образом:
, относящейся к системе координат X'Y'Z', и системой E. Как известно, эта операция может быть выражена как произведение E на некоторую роторную матрицу R(ϑr,ϑe,ϑa), , которая является функцией трех роторных матриц Ra(ϑa),Re(ϑe),Rr(ϑr). . При данных ϑa,ϑe,ϑr это может быть выражено следующим образом:
E′ = E•Rr(ϑr)Re(ϑe)Ra(ϑa) = E•R(ϑr,ϑe,ϑa) ,
где ,
, ,
, ,
,
Для определения угловых погрешностей решается уравнение:
R(ϑr,ϑe,ϑa) = R0, , (1)
где
R0 представляет известную матрицу, а ϑr,ϑe,ϑa являются искомыми величинами. R0 может быть представлена в виде .
.
Для ϑr,ϑe,ϑa могут быть получены решения двух видов ,
,
и ,
,
здесь
atan представляет arctang четырех квадрантов, а asin - arcsin в пределах - -π/2÷+π/2.
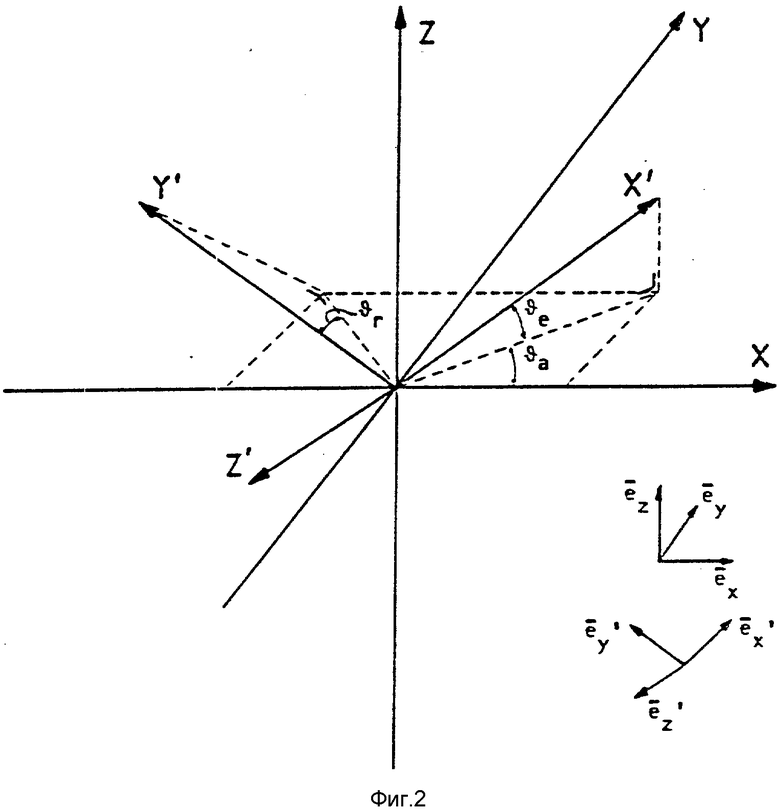
Способ преобразования систем координат, связанных с корпусами устройства, выполненного согласно изобретению, разъясняется ниже со ссылками на фиг. 3, a, b.
На фиг. 3,a представлен пример конструкции корпуса с элементом 19, образующим его нижнюю поверхность, верхним срезом 20 и вращающимся элементом 4, образующим верхнюю поверхность корпуса. Элемент 4 параллелен плоскости верхнего среза 20 и составляет угол β с нижней поверхностью элемента 19. Ортогональная система "по часовой стрелке" E0, привязанная к нижней поверхности элемента 19, состоит из векторов  которые были определены по отношению к известной системе координат E, например, жестко связанной с землей. Как показано на фиг. 3 a, вектор
которые были определены по отношению к известной системе координат E, например, жестко связанной с землей. Как показано на фиг. 3 a, вектор  перпендикулярен нижней поверхности элемента 19, вектор
перпендикулярен нижней поверхности элемента 19, вектор  перпендикулярен плоскости чертежа. Ортогональная система E1 привязана к плоскости верхнего среза 20, она состоит из векторов
перпендикулярен плоскости чертежа. Ортогональная система E1 привязана к плоскости верхнего среза 20, она состоит из векторов  определена по отношению к известной системе координат E. Вектор
определена по отношению к известной системе координат E. Вектор  перпендикулярен к плоскости верхнего среза 20, вектор
перпендикулярен к плоскости верхнего среза 20, вектор  параллелен вектору
параллелен вектору  . Оба вектора
. Оба вектора  указывают в одном направлении от наблюдателя. Оба вектора
указывают в одном направлении от наблюдателя. Оба вектора  расположены в одной плоскости - плоскости чертежа. Ортогональная система E2 привязана к верхней поверхности вращающегося элемента 4 и состоит из векторов
расположены в одной плоскости - плоскости чертежа. Ортогональная система E2 привязана к верхней поверхности вращающегося элемента 4 и состоит из векторов  определенных по отношению к известной системе координат E. Вектор
определенных по отношению к известной системе координат E. Вектор  перпендикулярен к верхней поверхности элемента 4 и, следовательно, совпадает с вектором
перпендикулярен к верхней поверхности элемента 4 и, следовательно, совпадает с вектором  . Как показано на фиг. 3b, векторы
. Как показано на фиг. 3b, векторы  привязанные к верхней поверхности вращающегося элемента 4, образуют угол ϕ1 с векторами
привязанные к верхней поверхности вращающегося элемента 4, образуют угол ϕ1 с векторами  привязанными к плоскости 20.
привязанными к плоскости 20.
Отсюда следует соотношения .
.
Или в матричной форме: .
.
Аналогично изложенному система E1 может быть выражена через систему E0: ,
,
следовательно,
E2 = E0Re(β)Ra(ϕi) (14) .
Если рассматривать комплекс из трех корпусов, то, основываясь на изложенном, путем последовательного применения роторных матриц, можно ортогональную систему Eb, привязанную к верхней поверхности вращающегося элемента верхнего корпуса, выразить через ортогональную систему E0, привязанную к нижней поверхности нижнего корпуса. Эта взаимосвязь может быть представлена следующим образом: .
.
Для того чтобы определить углы погрешностей верхней плоскости вращающегося элемента верхнего корпуса, и, следовательно, необходимо ввести понятие требуемой системы координат Ew. Это дает возможность определить углы погрешностей как углы азимута, возвышения и крена между системами координат, одна из которых требуемая, а другая привязана к верхней поверхности вращающегося элемента верхнего корпуса.
Подобно изложенному выше требуемая система координат может быть выражена через E0: .
.
Также Er может быть выражена через Ew: .
.
В результате выражение для углов погрешности принимает вид: .
.
Это выражение сводится к системе из девяти взаимосвязанных уравнений с тремя неизвестными углами δa,δe и δr.
Так как правая часть выражения - это известная роторная матрица, возможно получить два комбинированных решения для углов погрешности δa,δe и δr. Как наиболее очевидно, следует выбрать такую комбинацию, которая в фиксированном начальном положении сводит величины угловых погрешностей к нулю.
Очевидно, устройство по данному изобретению следует так устанавливать на палубе судна, чтобы система координат E0, привязанная к нижней поверхности нижнего корпуса совпала с так называемой эталонной системой, зафиксированной на судне. Указанная эталонная система представляет собой систему "по часовой стрелке", привязанную к судну. Эта система служит эталонной для определения положения судна по углам азимута, возвышения и крена по отношению к системе координат, закрепленной на земле (т.е. системе "по часовой стрелке", ориентированной на север). На практике указанные углы, определяющие положение судна, измеряются с помощью гироскопов. Если использовать этот способ, то можно выражение для Eb упростить, введя в него судовые углы азимута, возвышения и крена. Если символами ψa,ψe,ψr обозначить соответственно углы азимута, возвышения и крена, то
Eb= EaRr(ψr)Re(ψe)R(ψa)Q(β,ϕ1,ϕ2,ϕ3) (19) .
Выражение для требуемой системы координат по отношению к эталонной системе координат, связанной с землей, имеет вид
Ew= EaRr(ϑr)Re(ϑe)Ra(ϑa)= EaR(ϑr,ϑe,ϑa) (20) ,
а
Er может быть выражена через Ew: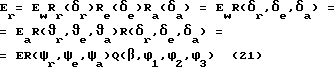 .
.
В результате получена следующая формула для углов погрешностей: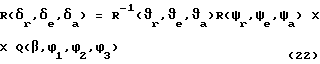 .
.
Преимущество использования угловых координат судна по отношению к неподвижной системе координат состоит в том, что при этом появляется возможность придания вращающемуся элементу верхнего корпуса некоторой произвольной позиции, которая выражается через ϑr,ϑe,ϑa по отношению к неподвижной системе координат, связанной с землей путем управления приводами, при таком управлении, которое практически сводит к нулю δa,ϑe и δr. Если устройство, выполненное согласно данному изобретению, используется для стабилизации радара на судне, причем этот радар должен совершать высокоравномерное вращение по отношению к неподвижной системе координат, ϑr = ϑe = 0 и ϑa = ωt, где t означает время, а ω - угловую скорость по отношению к неподвижной системе координат.
Возможно также, чтобы E0 не совпадала с эталонной системой судна. В этом случае угловые погрешности могут быть рассчитаны способом, аналогичным приведенному выше, принимая во внимание ориентацию E0 по отношению к эталонной системе судна.
Полагая угловые погрешности равными нулю из (22), можно получить выражения для требуемых величин ϕ1,ϕ2 и ϕ3:
Q(β,ϕw1,ϕw2,ϕw3) = R-1(ψr,ψe,ψa)R(ϑr,ϑe,ϑa) .(2, 3)
Количество решений этих уравнений зависит от углов между M и N. Если этот угол меньше, чем β2+β3, , имеется два решения, если этот угол равен β2+β3 - одно решение и, если указанный угол более β2+β3, решения не существует. Будем считать, что при нормальной работе устройства упомянутый выше угол изменяется от нуля до β2+β3. Это дает возможность в каждый момент времени выбирать одно наиболее подходящее решение из двух решений. В данном случае понятие "наиболее подходящее" означает, что выбранное решение представляет собой непрерывную функцию времени, если исходные величины также непрерывные функции по времени. Одним из способов обеспечения условия, чтобы угол между M и N оставался более нуля и менее β2+β3. является применение стопорных средств. Одним из преимуществ данного способа является то, что корпуса снабжаются стопорным средствами, которые исключают поворот более чем на 360o. Это условие представляет определенные выгоды, так как позволяет располагать кабели между корпусами и судном. Эти кабели могут использоваться, например, для энергоснабжения приводов.
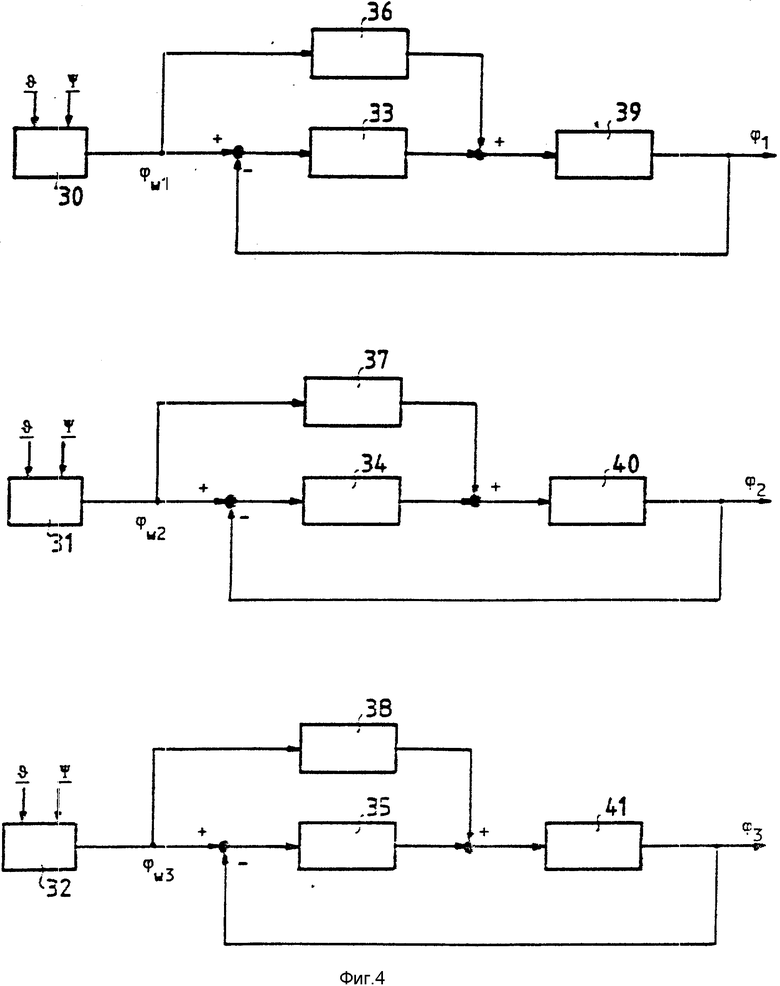
На фиг. 4 представлен первый вариант устройства, выполненного в соответствии с настоящим изобретением. В этом варианте воплощены изложенные выше идеи. Система приводов включает три независимых сервоконтура. Требуемые величины ϕw1,ϕw2 и ϕw3 определяются с помощью 23. Сервоконтуры включают привод 39 нижнего корпуса, привод 40 промежуточного корпуса и привод 41 нижнего корпуса. Каждый сервоконтур снабжен линейным регулятором соответственно 33, 34 и 35, по крайней мере первого порядка. Если это необходимо, предусматривается прямая связь 36 и/или 38.
Второй, наиболее предпочтительный вариант сервомеханизма имеет нелинейный развязывающий регулятор. Регулятор такого типа дает возможность кроме трех контролируемых моментов u1, u2, u3 регулировать еще три параметра ra, re, rr. Эти параметры характерны тем, что, если достаточно хорошо известны уравнения движения (динамическая модель) устройства, выполненного согласно изобретению, то ra влияет главным образом на δa, re на δe, rr на δr. Таким образом, практически устраняется взаимовлияние регулируемых параметров. Подвергнув δr,δe,δa и rr, re, rr соответствующим математическим операциям, можно получить для каждого данного момента точные величины u1, u2, u3, которые обеспечивают развязку. Если эти математические операции совершены, зависимость между углом погрешности δi и регулируемой величиной ri может быть представлена в следующем виде:
δi = ri+ξi(i = a,e,r) (24) ,
здесь ξi означает неточности динамической модели устройства, являющегося предметом данного изобретения.
На основе нового регулируемого параметра ri появляется возможность создания индивидуального линейного регулятора Hi(s) для каждого угла погрешности, получив таким образом три развязывающих сервоконтура, представляемых выражением:
ri(s) = Hi(s)δi(s) (i = a,e,r) (25) ,
здесь
s - оператор Лапласа.
Существенным преимуществом развязки является то, что полоса частот каждого сервоконтура может отлаживаться отдельно.
В наиболее предпочтительном варианте данного изобретения регулируемые величины  подвергаются следующим математическим операциям с целью определения
подвергаются следующим математическим операциям с целью определения  .
.
Обычная процедура векторного дифференцирования проводятся при следующих определениях: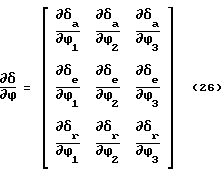 ,
, ,
, ,
,
Квадрат вектора определяется выражением: .
.
Соответственно приведенным выше определениям и математическим методам векторного дифференцирования, упомянутое развязывание может быть достигнуто в том случае, если регулируемые параметры  , угловые погрешности
, угловые погрешности  и измеренные углы
и измеренные углы  связаны следующим уравнением, по которому определяются величины регулируемых моментов для трех приводов
связаны следующим уравнением, по которому определяются величины регулируемых моментов для трех приводов  .
.
 .
.
В этом уравнении M(ϕ) есть массовая матрица промежуточного корпуса 7, установленного на верхнем вращающемся элементе нижнего корпуса, а также верхнего корпуса 11 и объекта 15, закрепленного на верхнем вращающемся элементе верхнего корпуса. Выражение для M(ϕ) может быть получено из выражения для кинетической энергии узла, состоящего из конусов 7, 11 и объекта 15 при остановленном нижнем корпусе. Последнее выражение имеет вид: .
.
По законам математики это всегда возможно. Массовая матрица может таким образом быть определенной предварительно в качестве функции  и как таковая может быть введена в алгоритм управления. Формула для
и как таковая может быть введена в алгоритм управления. Формула для  может быть найдена из формул движения узла из корпусов 7, 11 и объекта 15 при неподвижном нижнем корпусе. Эти уравнения движения получаются из уравнений Эйлера-Лагранжа:
может быть найдена из формул движения узла из корпусов 7, 11 и объекта 15 при неподвижном нижнем корпусе. Эти уравнения движения получаются из уравнений Эйлера-Лагранжа: .
.
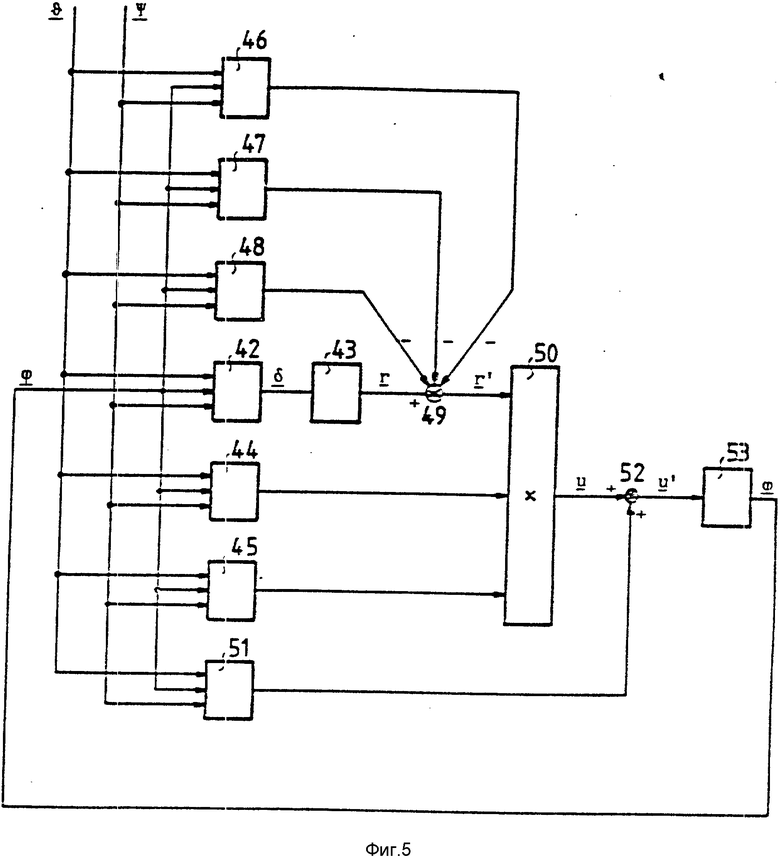
Полученный в результате алгоритм управления представлен на блокдиаграме на фиг. 5. Алгоритм включает модуль 42, который определяет вектор  угловой погрешности по вектору
угловой погрешности по вектору  измеренного сигнала, вектору
измеренного сигнала, вектору  положения палубы и вектору
положения палубы и вектору  эталонного сигнала. Для этого могут быть использованы выражения (1) - (18). Алгоритм включает также модуль 43, который путем вычислений по крайней мере первого порядка по вектору
эталонного сигнала. Для этого могут быть использованы выражения (1) - (18). Алгоритм включает также модуль 43, который путем вычислений по крайней мере первого порядка по вектору  угловой погрешности определяет три управляющих сигнала ra, re и rr, составляющих в сумме вектор
угловой погрешности определяет три управляющих сигнала ra, re и rr, составляющих в сумме вектор  . Далее алгоритм содержит модуль 44, который определяет матрицу.
. Далее алгоритм содержит модуль 44, который определяет матрицу.
 ,
,
и модуль 45, который определяет массовую матрицу M(ϕ) узла из промежуточного корпуса 7, верхнего корпуса 11 и объекта 15, укрепленного на вращающемся верхнем элементе верхнего корпуса. Алгоритм может содержать также модуль 46, который определяет производную ,
,
модуль 47, определяющий ,
,
и модуль 48, определяющий .
.
В 49  получаются из
получаются из  с получением управляющего вектора
с получением управляющего вектора  . Затем величина
. Затем величина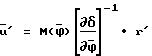 ,
,
определяется в 50.
Если это необходимо, остаточный член  может быть определен в модуле 51, в модуле 52 он прибавляется к
может быть определен в модуле 51, в модуле 52 он прибавляется к  . В результате получают
. В результате получают  состоящий из командных моментов для приводов 53 нижнего, промежуточного и верхнего корпусов.
состоящий из командных моментов для приводов 53 нижнего, промежуточного и верхнего корпусов.
Упомянутые модули могут быть запрограммированы в цифровом вычислители с использованием языка программирования высокого уровня, например "C".
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2090825C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ | 1997 |
|
RU2131133C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ | 1996 |
|
RU2137149C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ | 1997 |
|
RU2121575C1 |
| УСТРОЙСТВО ОЦЕНКИ ДЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 2005 |
|
RU2304790C1 |
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2140657C1 |
| ИНЕРЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ | 2012 |
|
RU2517819C1 |
| БЕСКОНТАКТНЫЙ СПОСОБ ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 1995 |
|
RU2114550C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ПРИ ЛИНЕЙНОМ ДВИЖЕНИИ ОБЪЕКТА | 2002 |
|
RU2210741C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И УГЛОВОЙ ОРИЕНТАЦИИ ТЕЛЕЖКИ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2303240C1 |
Изобретение относится к устройствам для ориентирования объекта, установленного на первой плоскости, например антенны радара относительно второй плоскости, например палубы корабля. Устройство включает совокупность трех идентичных кольцеобразных корпусов, каждый из которых имеет элемент, образующий верхнюю поверхность, и элемент, образующий нижнюю поверхность, причем указанные поверхности непараллельны. Каждый корпус имеет привод для вращения элемента, образующего верхнюю поверхность, вокруг оси корпуса относительно его нижней поверхности. Каждый привод выполнен с возможностью осуществления независимого вращения и, кроме того, предусмотрено управление приводами с целью ориентирования объекта с тремя степенями свободы относительно второй плоскости. 13 з.п. ф-лы, 5 ил.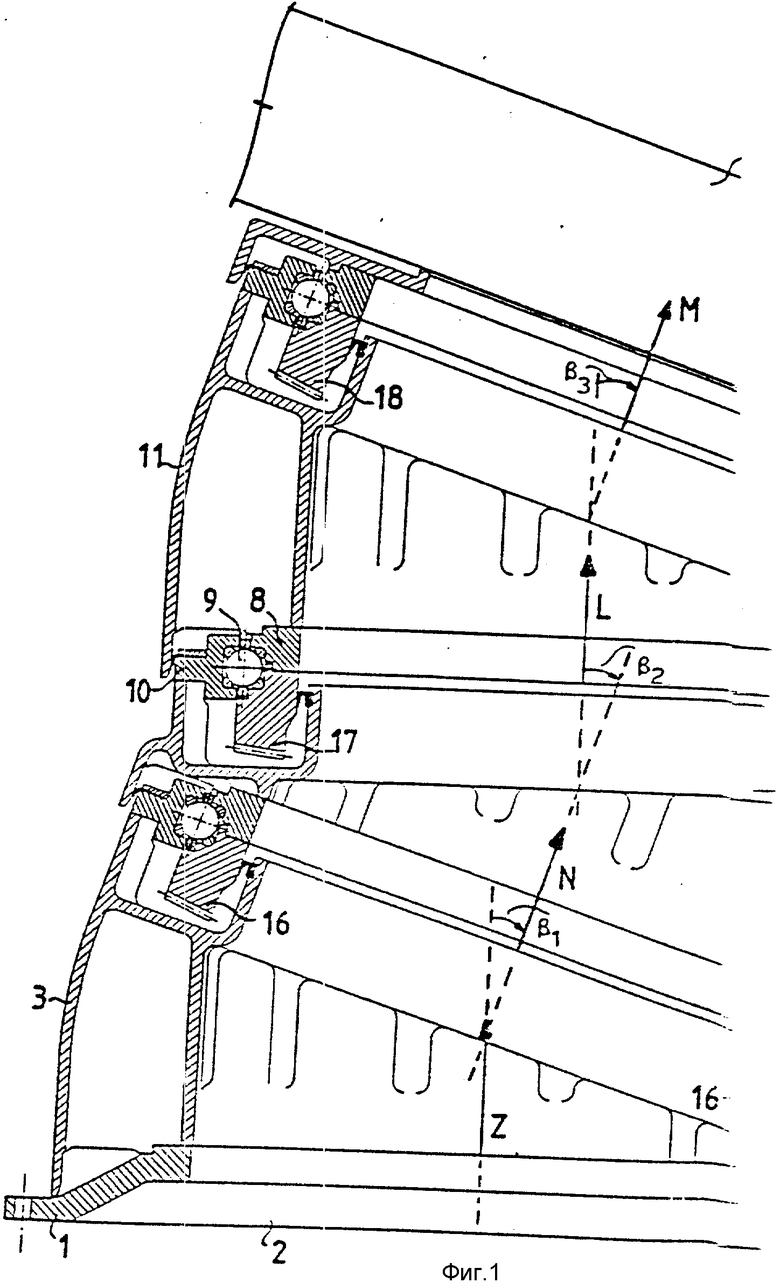
 измеренного сигнала, вектору эталонного сигнала
измеренного сигнала, вектору эталонного сигнала  и вектору
и вектору  положения поверхности вектора
положения поверхности вектора  угловой погрешности, состоящего из угловой погрешности δa азимута, угловой погрешности δe возвышения и угловой погрешности δr крена между системой координат, связанной с объектом, и требуемой системой координат.
угловой погрешности, состоящего из угловой погрешности δa азимута, угловой погрешности δe возвышения и угловой погрешности δr крена между системой координат, связанной с объектом, и требуемой системой координат. сигнала привода по вектору
сигнала привода по вектору  угловой погрешности.
угловой погрешности. сигнала привода определен передаточными функциями H1(s), H2(s) и H3(s) по крайней мере первого порядка по следующим соотношениям:
сигнала привода определен передаточными функциями H1(s), H2(s) и H3(s) по крайней мере первого порядка по следующим соотношениям:
u1(s) = H1(s)•δa(s)
u2(s) = H2(s)•δe(s)+H3(s)•δr(s)
u3(s) = H2(s)•δe(s)-H3(s)•δr(s)
где s - оператор Лапласа.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машина для нанизывания на шнур табачных листьев | 1957 |
|
SU114588A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU155922A1 | |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
