Изобретение относится к способу определения критического значения окружной скорости центра массы твердого тела на соответствующем радиусе его вращения, при котором в теле как напряжения растяжения, так и сжатия оказываются минимальными, что соответствует состоянию невесомости тела, и может быть использовано при создании новой техники с вращающимися элементами для различных отраслей промышленности и, в частности, в энергетическом турбостроении, при создании новых типов летательных аппаратов, а также во многих других случаях.
Понятие "критическое значение окружной скорости центра массы твердого тела" открыто автором, поэтому и не обнаружено аналогов, имеющих назначение - определение критического значения окружной скорости тела.
Цель изобретения - улучшение технических характеристик двигателей и других механизмов с вращающимися элементами за счет улучшения их массовых показателей, повышения надежности в работе, расширения возможностей использования новых конструкционных материалов для их элементов, создание новых типов летательных аппаратов, получение экспериментальных данных для корректировки расчетной формулы центробежной силы и существующих расчетов на прочность вышеуказанных элементов, обеспечение возможности для имитации движения планет в состоянии невесомости.
Указанная цель достигается тем, что в способе определения критического значения окружной скорости центра массы твердого тела на соответствующем радиусе его вращения вал, установленный в подшипниках опоры, соединяют с тахометром-частотомером, устанавливают на вал, соосно ему, диск и жестко соединяют его с валом, осуществляют привод вала с плавным регулированием его частоты вращения, при этом в диске со стороны его плоской поверхности выполняют по меньшей мере один канал, соединяющий приосевую и периферийную зоны диска, так что основание канала располагается в плоскости, перпендикулярной оси вращения вала, а внутренние боковые поверхности стенок канала в каждом его сечении перпендикулярны основанию канала, размещают внутри канала в его продольном направлении на расстоянии друг от друга две идентичные по своим характеристикам пружины, каждый конец которых упирается в свой ползун, свободно перемещающийся в продольном направлении канала в обе стороны, внутри канала между внутренними ползунами, установленными между смежными концами пружин, размещают вплотную к поверхности каждого ползуна тело, имеющее свободу перемещения в плоскости основания канала в ту или иную сторону в его продольном направлении с минимальным коэффициентом трения об основание и боковые поверхности стенок канала под воздействием внешней силы, внешние ползуны, упирающиеся в концы пружин, обращенные в противоположные стороны, связывают между собой соединительным устройством для одновременного перемещения в ту или иную сторону внешних ползунов, обеих пружин, внутренних ползунов и тела в продольном направлении канала, и по крайней мере изменения силы сжатия обеих пружин, минимальное значение которой может равняться нулю, осуществляют регулирование частоты вращения вала для достижения критического значения окружной скорости центра массы тела на соответствующем радиусе его вращения, определяемом с помощью измерительного устройства, до установления равенства длин обеих пружин, а критическое значение окружной скорости центра массы тела на радиусе его вращения определяют по формуле
Wкр= 2πrц.м•n,
где rц.м. - радиус вращения центра массы тела, м;
n - частота вращения вала, с-1.
Отсутствие аналогов заявляемому техническому решению позволяет сделать вывод о том, что заявляемое техническое решение соответствует критерию "новизна".
В известных науке и технике решениях нами не обнаружены совокупности признаков заявляемого решения, проявляющих аналогичные свойства и позволяющих достичь указанный в цели изобретения результат, следовательно решение соответствует критерию изобретения "существенные отличия".
Сущность изобретения поясняется чертежом, где на фиг. 1 представлена установка для определения критического значения окружной скорости центра массы твердого тела на соответствующем радиусе его вращения; на фиг. 2 - сечение по А-А фиг. 1; на фиг. 3 - регулирующее устройство; на фиг. 4 - установка с поворотным устройством; на фиг. 5 - установка для определения критического значения окружной скорости центра массы твердого тела на соответствующем радиусе его вращения; на фиг. 6 - измеритель скорости; на фиг. 7 - измеритель скорости с измененным расположением грузов; на фиг. 8 - фрагмент участка вихревой трубы с завихрителем потока; на фиг. 9 - сечение по Б-Б фиг. 8; на фиг. 10 - сечение по Б-Б фиг. 8; на фиг. 11 - вихревая труба с соосно размещенным внутри нее тонкостенным полым цилиндром; на фиг. 12 - сечение по В-В фиг. 11; на фиг. 13 - сечение по В-В фиг. 11; на фиг. 14 - иллюстрация действующих сил внутри жидкости на наружную поверхность вращающегося совместно с жидкостью пустотелого цилиндра; на фиг. 15 - иллюстрация действующих сил внутри вращающейся жидкости, имеющей форму пустотелого цилиндра; на фиг. 16 - иллюстрация действующих сил внутри жидкости на внутреннюю поверхность вращающегося совместно с жидкостью пустотелого цилиндра; на фиг. 17 - иллюстрация действующих сил внутри вращающейся жидкости, имеющей форму пустотелого цилиндра; на фиг. 18 - полый цилиндр с отделяемым от него элементом; на фиг. 19 - иллюстрация действующих сил внутри лопатки; на фиг. 20 - иллюстрация действующих сил внутри лопатки.
В способе определения критического значения окружной скорости центра 1 массы твердого тела 2 на соответствующем радиусе rц.м его вращения (фиг. 1, 2) вал 3, установленный в подшипниках опоры 4, соединяют с тахометром-частотомером 5, устанавливают на вал 3, соосно ему, диск 6 и жестко соединяют его с валом 3, осуществляют привод вала 3 с плавным регулированием его частоты вращения n, при этом в диске 6 со стороны его плоской поверхности 7 выполняют, по меньшей мере один канал 8, соединяющий приосевую 9 и периферийную 10 зоны диска 6, так, что основание 11 канала 8 располагается в плоскости, перпендикулярной оси 12 вращения вала 3, а внутренние боковые поверхности 13, 14 стенок канала 8 в каждом его сечении перпендикулярны основанию 11 канала 8, размещают внутри канала 8 в его продольном направлении на расстоянии l друг от друга две идентичные по своим характеристикам пружины 15, 16, каждый конец которых упирается в свой ползун 17, 18, 19, 20, свободно перемещающийся в продольном направлении канала 8 в обе стороны, внутри канала 8 между внутренними ползунами 17, 18, установленными между смежными концами пружин 15, 16, размещают вплотную к поверхности каждого ползуна 17, 18 тело 2, имеющее свободу перемещения (±X) в плоскости основания 11 канала 8 в ту или иную сторону в его продольном направлении с минимальным коэффициентом трения об основание 11 и боковые поверхности 13, 14 стенок канала 8 под воздействием внешней силы, внешние ползуны 19, 20, упирающиеся в концы пружин 15, 16, обращенные в противоположные стороны, связывают между собой соединительным устройством 21 для одновременного перемещения (±X) в ту или иную сторону внешних ползунов 19, 20, обеих пружин 15, 16, внутренних ползунов 17, 18 и тела 2 в продольном направлении канала 8, и по крайней мере изменения силы сжатия обеих пружин 15, 16, минимальное значение которой может равняться нулю, осуществляют регулирование частоты вращения n вала 3 для достижения критического значения окружной скорости Wкр центра 1 массы тела 2 на соответствующем радиусе rц.м его вращения, определяемом с помощью измерительного устройства 22, до установления равенства длин l1 и l2 обеих пружин 15, 16, а критическое значение окружной скорости Wкр центра 1 массы тела 2 на радиусе rц.м его вращения определяют по формуле Wкр= 2πrц.м•n, где rц.м - радиус вращения центра массы тела, м; n - частота вращения вала, с-1.
При этом он может заключаться в том, что осуществляют регулирование величины одновременного перемещения (±X) в ту или иную сторону внешних ползунов 19, 20, обеих пружин 15, 16 внутренних ползунов 17, 18 и тела 2 для установки на каждом режиме определения критического значения окружной скорости Wкр центра 1 массы тела 2 нового значения радиуса rц.м вращения центра 1 массы тела 2 с помощью регулирующего устройства 23 величины перемещения (±X) внешних ползунов 19, 20 при вращении вала 3 с диском 6, которым снабжено соединительное устройство 21 внешних ползунов 19, 20 (фиг. 1, 3); что осуществляют регулирование угла ϕ расположения оси 12 вала 3 с диском 6 по отношению к горизонтальной плоскости для установки на соответствующем режиме определения критического значения окружной скорости Wкр центра 1 массы тела 2 необходимого значения угла ϕ -, от нуля при горизонтальном расположении оси 12 вала 3 до 90o при ее вертикальном расположении, с помощью поворотного устройства 24 (фиг. 4).
Способ определения критического значения окружной скорости центра массы твердого тела на соответствующем радиусе его вращения, при котором в теле на вышеуказанном радиусе вращения его центра массы отсутствуют напряжения растяжения или сжатия, а при отклонении от этого радиуса в самом вращающемся теле в сторону его увеличения или уменьшения такие напряжения имеются, но значение их оказывается минимальным в сравнении со случаем вращения центра массы тела на любом ином радиусе вращения при вышеуказанной угловой скорости, соответствующей Wкр, основан на открытом автором законе вращающегося тела, который гласит: "Всякое тело, свободно вращающееся вокруг оси на соответствующем удалении его центра массы от последней, при изменении окружной скорости под воздействием внешней силы изменяет радиус своего вращения на величину, соответствующую величине изменения окружной скорости центра массы тела, а именно при увеличении окружной скорости тело переходит на увеличенный радиус своего вращения, а при уменьшении окружной скорости - на уменьшенный радиус своего вращения. Вращение тела при критическом значении окружной скорости его центра массы на соответствующем радиусе вращения при отсутствии внешних воздействий на него может осуществляться сколь угодно долго. При этом, если тело при вращении каким-то образом удерживается от возможного перемещения в направлении к оси его вращения или в направлении от вышеуказанной оси, то при изменении окружной скорости его центра массы под воздействием внешней силы в теле возникают напряжения растяжения или сжатия, значение которых соответствует величине увеличения или уменьшения окружной скорости центра массы тела, а направление действия растягивающих или сжимающих усилий определяется местом удержания тела от вышеуказанных перемещений, которое может располагаться на стороне внутренней траектории, описываемой при вращении телом, или на стороне его внешней траектории вращения. Так, при увеличении окружной скорости центра массы тела выше ее критического значения для данного радиуса вращения и расположения места удержания тела от перемещения на стороне его внутренней траектории в теле возникают напряжения растяжения, а при расположении места удержания тела на стороне его внешней траектории в указанном случае в теле возникают напряжения сжатия, и, наоборот, при уменьшении окружной скорости центра массы тела ниже ее критического значения для данного радиуса вращения и расположении места удержания тела от перемещения на стороне его внутренней траектории в теле возникают напряжения сжатия, а при расположении места удержания тела на стороне его внешней траектории в последнем случае в теле возникают напряжения растяжения".
Данный закон сформулирован автором на основе известных научных данных, личных наблюдений автора, ранее открытого им закона свободно вращающегося вихревого потока среды с неоднородным полем плотностей и с разной молекулярной массой компонентов и выполненных автором опытных исследований.
Для реализации вышеуказанного способа определения критического значения окружной скорости Wкр центра 1 массы твердого тела 2 на соответствующем радиусе rц.м его вращения в установке (фиг. 1, 2) вал 3, установленный в подшипниках опоры 4, соединяют с тахометром-частотомером 5 для измерения частоты вращения n вала 3. На фал 3, соосно ему, устанавливают диск 6 и жестко соединяют его с валом 3. Осуществляют привод вала 3 с плавным регулированием его частоты вращения n, для чего может быть использован электродвигатель или иной способ приведения вала 3 во вращение.
В диске 6 со стороны его плоской поверхности 7 выполняют по меньшей мере один канал 8, соединяющий приосевую 9 и периферийную 10 зоны диска 6 так, что основание 11 канала 8 располагается в плоскости, перпендикулярной оси 12 вращения вала 3, а внутренние боковые поверхности 13, 14 стенок канала 8 в каждом его сечении перпендикулярны основанию 11 канала 8.
Внутри канала 8 размещают в его продольном направлении на расстоянии l друг от друга две идентичные по своим характеристикам пружины 15, 16, каждый конец которых упирается в свой ползун 17, 18, 19, 20, свободно перемещающийся в продольном направлении канала 8 в обе стороны. Также внутри канала 8 между внутренними ползунами 17, 18, установленными между смежными концами пружин 15, 16, размещают вплотную к поверхности каждого ползуна 17, 18 тело 2, имеющее свободу перемещения (±X) в плоскости основания 11 канала 8 в ту или иную сторону в его продольном направлении. В канале 8 могут размещаться тела значительных размеров и масс.
С помощью известных способов твердое тело 2 размещают в канале 8 таким образом, чтобы при его перемещении в последнем под воздействием внешней силы в продольном направлении канала 8 затраты энергии на преодоление сил трения об основание 11 и боковые поверхности 13, 14 стенок канала 8 были минимальными. Для этой цели могут использоваться подшипники качения или опоры на этих подшипниках и другие конструктивные решения, направленные на уменьшение потерь энергии на преодоление сил трения при перемещении тела 2 в канале 8.
С целью уравновешивания радиальных сил, возникающих при вращении вала 3 с диском 6 и телом 2, может выполняться второй канал 8, расположенный симметрично относительно оси 12 вала 3 в диске 6, в котором могут быть при этом установлены аналогичные вышеуказанным элементы. Кроме того, установка снабжается комплектом противовесов, имеющих разную массу. Необходимый противовес указанного комплекта размещают на противоположной стороне плоской поверхности 7 диска 6 симметрично по отношению к телу и оси 12 вала 3.
Внешние ползуны 19, 20, упирающиеся в концы пружин 15, 16, обращенные в противоположные стороны, связывают между собой соединительным устройством 21 (фиг. 1, 2) для одновременного перемещения (±X) в ту или иную сторону внешних ползунов 19, 20, обеих пружин 15, 16, внутренних ползунов 17, 18 и тела 2 в продольном направлении канала 8, и по крайней мере, изменения силы сжатия обеих пружин 15, 16, минимальное значение которой может равняться нулю.
Путем вышеуказанного совместного перемещения внешних ползунов 19, 20 и элементов, размещенных между ними, включая тело 2, производится изменение величины радиуса rц.м вращения тела, для которого определяется критическое значение окружной скорости Wкр центра 1 массы твердого тела 2.
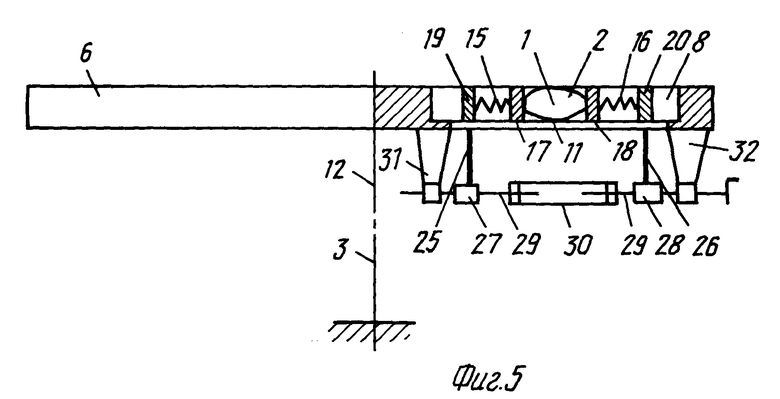
Конструктивное выполнение соединительного устройства 21 может быть различным. Один из вариантов его выполнения представлен на фиг. 5. В основании 11 канала 8 в продольном его направлении выполняют прорезь, через которую внешние ползуны 19, 20 жестко соединяют с одним из концов стержней 25, 26, а к другому концу каждого стержня 25, 26 приваривают втулку 27, 28, через отверстие в которой проходит тяга 29 с талрепом 30, соединяющим два участка тяги 29. Сама тяга 29 устанавливается в опорах 31, 32, закрепленных на диске 6. Тягу 29 соединяют с опорой 31 с возможностью свободного осевого перемещения, а с опорой 32 указанную тягу 29 соединяют резьбовым соединением таким образом, чтобы при вращении тяги 29 в ту или иную сторону происходило ее перемещение в осевом направлении, а соответственно и внешних ползунов 19, 20 и других элементов установки, расположенных между ними, включая тело 2.
Соединение с помощью талрепа 30 двух участков тяги 29 позволяет изменять расстояние между внешними ползунами 19, 20 и тем самым изменять силу сжатия пружин 15 и 16.
Вышеуказанное конструктивное выполнение соединительного устройства 21 обеспечивает перемещение ползунов 19, 20 в прямолинейном направлении. А так как внутренние боковые поверхности 13, 14 стенок канала 8 могут выполняться криволинейной формы, что обеспечивает перемещение тела 2 в канале 8 по криволинейному направлению в плоскости основания 11 канала 8, поэтому соединение участков тяги 29 с помощью талрепа 30 выполняют шарнирным с обеих ее сторон. Кроме того, может быть осуществлено шарнирное соединение стержней 25, 26 с ползунами 19, 20, обеспечивающее поворот стержней вокруг своей оси внутри соединительного отверстия в каждом из ползунов 19, 20. Могут быть использованы и другие конструктивные решения для обеспечения криволинейного движения ползунов и тела 2 внутри канала 8.
Установка может снабжаться комплектом сменных парных пружин, каждая сменная пара которых имеет одинаковые характеристики внутри пары, а характеристики сменных пар при этом отличаются друг от друга, что позволяет варьировать ими путем замены одних пар пружин на другие для более точного определения значения Wкр.
Диск 6 может выполняться разнообразной конструкции. Так, он может быть сплошным, может состоять из ступицы, обода и соединяющих их ребер, а также может иметь другую форму.
Для предотвращения поворота участков тяги 29 относительно талрепа 30 на концы вышеуказанных участков тяги 29 устанавливаются контргайки или используются другие способы фиксации указанных элементов тяги и талрепа 30 от возможного взаимного перемещения.
Сила сжатия каждой из пружин 15, 16 может варьироваться в пределах от нуля и выше до целесообразного значения, определяемого опытным путем. Пружины 15, 16, устанавливаемые в канале 8 диска 6, выполняют роль успокоителей, уменьшающих амплитуду радиальных перемещений твердого тела в канале на данном режиме вращения относительно центра, отстоящего от оси вращения на расстоянии радиуса rц.м тела, для которого определяется Wкр из-за неравномерного вращения диска с телом.
При отсутствии пружин тело при вращении в состоянии невесомости из-за вышеуказанной неравномерности вращения будет совершать возвратно-поступательные (колебательные) движения относительно вышеуказанного центра. В этом случае rц.м будет определяться как полусумма минимального и максимального удаления точки на теле, соответствующей его центру массы, от оси вращения тела. Таким образом, наличие пружин 15 и 16 в установке повышает точность измерений и ускоряет сам процесс их выполнения.
Характеристики выбираемого комплекта пружин 15, 16 зависят от массы тела и радиуса вращения центра его массы, для которого определяется Wкр.
При работе установки, когда происходит вращение диска 6, положение центра 1 массы тела 2 (фиг. 1) определяется с помощью измерительного устройства 22.
Как отмечалось выше, рассматриваемый способ определения критического значения окружной скорости Wкр центра массы твердого тела на соответствующем радиусе его вращения базируется на законе, открытым автором, который изменяет существующие физические представления о действии центробежной силы, возникающей при вращении тела, центр массы (термин "центр массы" тождественен термину "центр масс", так как под массой понимается ее интегральное значение) которого не совпадает с осью вращения последнего. В связи с этим остановимся на формуле расчета центробежных сил, действующих на тело, расположенное на расстоянии от оси его вращения, и зависящих от скорости вращения и от расстояния тела от оси вращения.
Указанная формула имеет вид [2]
где M - масса тела;
W - окружная скорость (линейная скорость);
r - радиус вращения или расстояние тела от оси вращения; угловая скорость, n - число оборотов в секунду.
угловая скорость, n - число оборотов в секунду.
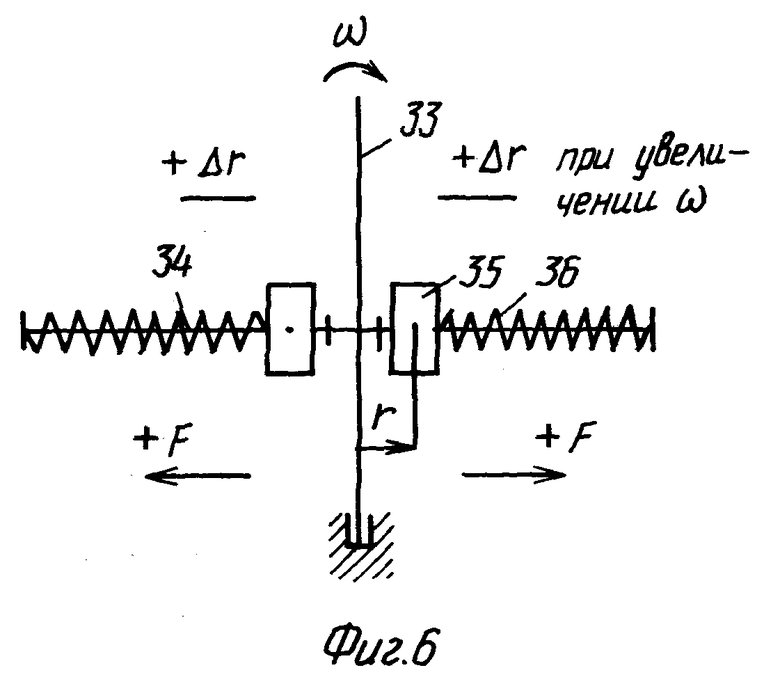
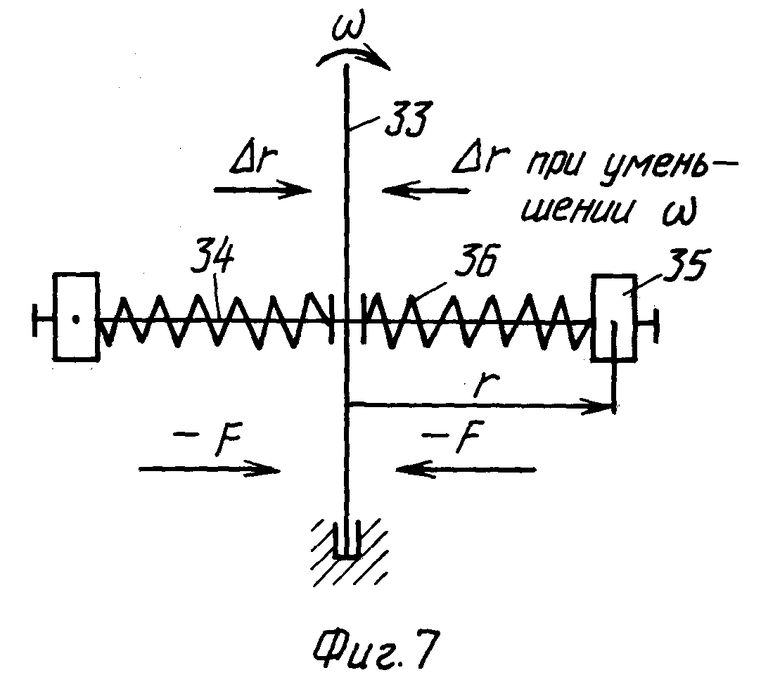
Согласно формулы центробежная сила в общем ее понимании, так как она может быть и центростремительной силой (открыто автором), является всегда положительной. На самом деле, как будет показано ниже при более глубоком рассмотрении закона вращающегося тела, это вовсе не так. Центробежная сила может быть как положительной, действующей в направлении от оси вращения тела, так и отрицательной, действующей в направлении к оси вращения тела, что показано на фиг. 6 и 7, где 33 - ось, 34 - стержень, 35 - груз, 36 - пружина.
Знак "плюс" соответствует вращению тела (груза) со значением окружной скорости центра массы тела, превышающем ее критическое значение на данном радиусе вращения указанного центра массы тела. Знак "минус" соответствует вращению тела со значением окружной скорости центра массы последнего, меньшим ее критического значения на данном радиусе вращения центра массы тела.
Покажем, что вышеприведенная расчетная формула для определения значения центробежной силы тела в зависимости от скорости вращения и от расстояния r тела от оси вращения не отражает реальности и поэтому требуется ее корректировка. Для этого допустим, что центробежная сила Fц (фиг. 6), создаваемая телом (грузом) по указанной формуле, определена и соответствует фиг. 6, т.е. M = const, ω и r для данного режима вращения тела определены и согласуются с характеристиками измерителя частоты вращения. Изменяя в формуле r на ±Δr, тем самым согласно формуле увеличивается или уменьшается на соответствующую величину ±ΔFц центробежная сила Fц.
Однако при неизменных ω и M при прочих равных условиях положение тела на фиг. 6 не изменится. Никакого изменения не произойдет даже в случае, когда при работе измерителя скорости оказать на него внешнее воздействие для соответствующего перемещения груза на ±Δr, так как после снятия этого воздействия тело вновь придет в первоначальное положение.
При увеличении угловой скорости ω, а следовательно, соответствующем уменьшении r для сохранения Fц = const согласно расчетной формулы центробежной силы произойдут следующие изменения в работе измерителя скорости (фиг. 6). Увеличение ω согласно фиг. 6 приведет к увеличению r, так как в действительности Fц груза измерителя увеличится, т.е. также видим полное несоответствие расчетной формулы с реальной работой измерителя скорости.
Такое же несоответствие имеется и при уменьшении ω и соответствующем увеличении r для сохранения Fц = const согласно расчетной формулы для определения Fц, а именно при уменьшении ω и прочих равных условиях r уменьшится (фиг. 6), т. е. груз сместится в направлении к оси вращения и фактическое значение Fц уменьшится в сравнении с Fц, полученной согласно расчетной формулы для ее определения.
Кроме того, как отмечалось выше, знак центробежной силы изменяется, т.е. может быть как положительным, так и отрицательным (см. фиг. 6, 7). Следовательно, как следует из вышерассмотренного, угловая скорость и радиус вращения тела в формуле для расчета центробежной силы являются взаимосвязанными величинами.
Таким образом, требуется корректировка формулы для расчета центробежной силы, а также в связи с этим и корректировка существующих расчетов на прочность двигателей и других механизмов с вращающимися элементами, что может быть осуществлено только при использовании рассматриваемого изобретения.
Решение вышеуказанных задач, связанных с корректировкой формулы для расчета центробежной силы и существующих расчетов на прочность вышеуказанных элементов, обеспечивает решение задач, направленных на улучшение технических характеристик двигателей и других механизмов за счет реальной оценки действующих в них напряжений, возникающих при их работе.
Рассмотрим далее физическую природу закона вращающегося тела, открытого автором, для выяснения, каким образом на основе указанного закона осуществлен способ определения критического значения окружной скорости центра массы твердого тела на соответствующем радиусе его вращения, а отсюда и соответствующего понимания перспективы использования рассматриваемого способа для решения различного рода технических и других задач.
А так как открытие вышеуказанного закона было сделано на основе открытого ранее автором закона Ерченко о свободно вращающемся вихревом потоке среды с неоднородным полем плотностей и с разной молекулярной массой компонентов, поэтому целесообразно для раскрытия физической сущности закона вращающегося тела первоначально рассмотреть физическую сущность первого закона, который гласит: "В свободно вращающемся вихревом потоке среды (газа, жидкости, их смесей, диспергированной, двухфазной, пылегазовой и другой сред) с неоднородным полем плотностей и с разной молекулярной массой компонентов в процессе затухания вращательного движения потока за сечением по его длине, в котором максимальное значение окружной скорости достигает критического значения, обеспечивающего еще вращение наиболее тяжелых частиц среды в периферийной зоне потока, возникает процесс непрерывного замещения менее тяжелых частиц среды тяжелыми в направлении к оси вращения потока, продолжающийся до сечения, в котором среда во вращающемся потоке располагается кольцевыми слоями в порядке возрастания ее плотности в каждом последующем из них в направлении к оси вращения вихревого потока. При максимальном значении окружной скорости, большем критического значения, процесс непрерывного замещения менее тяжелых частиц среды тяжелыми протекает в обратном вышеуказанному направлении, т.е. в направлении к периферии потока".
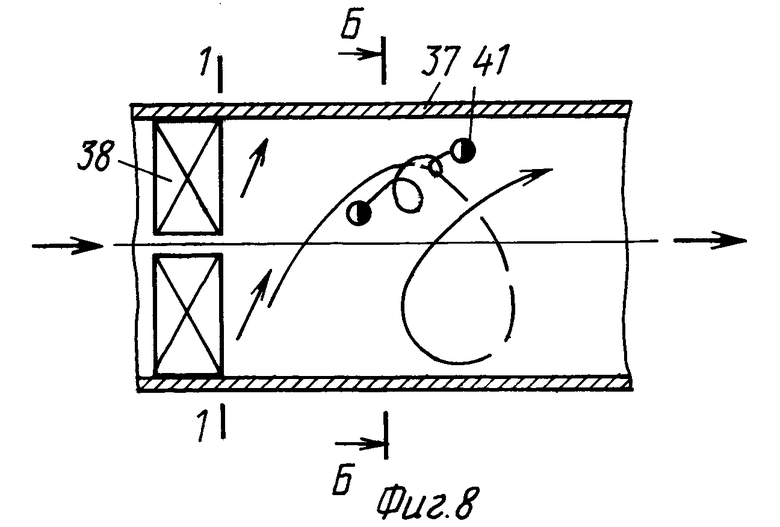
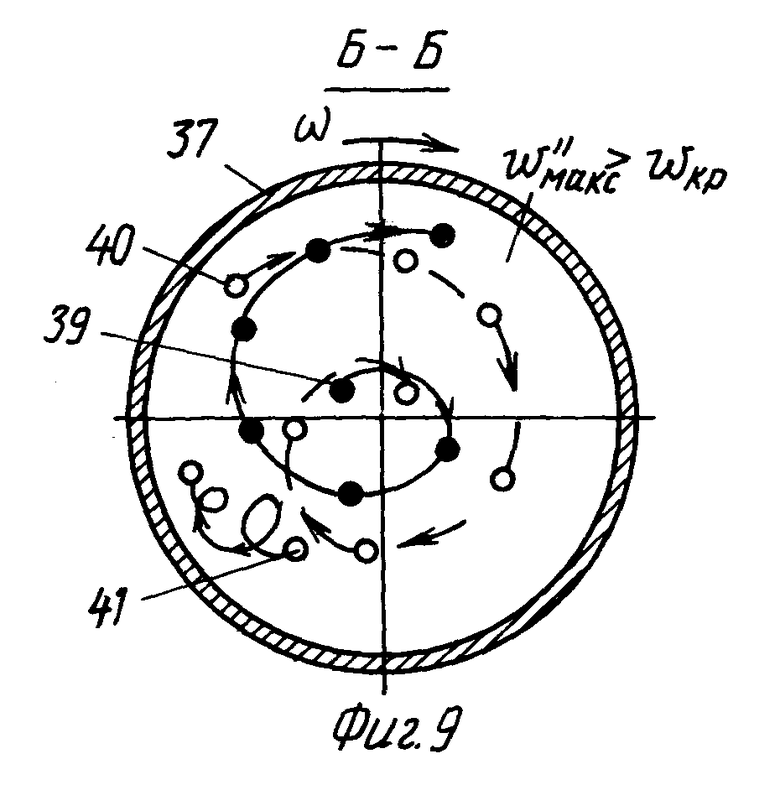
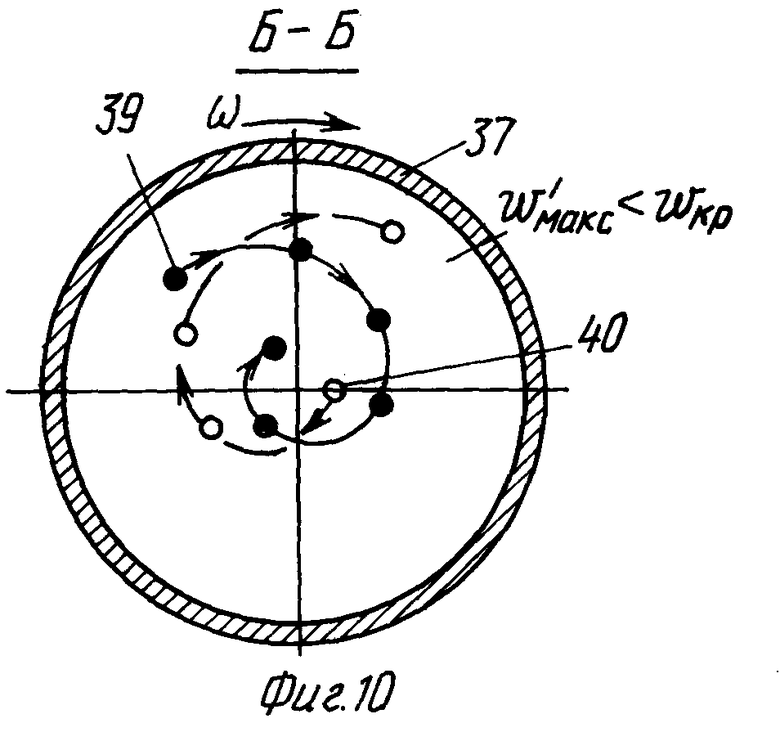
Физическая картина процесса замещения одних частиц другими, т.е. имеющими разную молекулярную массу, во вращающемся вихревом потоке газа в вихревой трубе 37 (фиг. 8), на входе в которую установлено закручивающее устройство 38 (лопаточный завихритель), представляется следующим образом. Среда (газ) имеет одинаковую температуру во всех точках объема потока. Максимальное значение окружной скорости W'макс закрученного потока в выходном сечении 1-1 завихрителя потока 38 (фиг. 8) может не превышать критического значения Wкр, при котором еще обеспечивается вращение наиболее тяжелых частиц 39 (наибольшей молекулярной массы) в периферийной зоне потока, а также W''макс может превышать вышеуказанное критическое значение окружной скорости Wкр. В зависимости от вышеуказанного максимального значения окружной скорости вихревого потока на выходе из завихрителя потока 38 процесс непрерывного замещения менее тяжелых частиц 40 среды тяжелыми 39 при затухании вращательного движения потока происходит в направлении к оси вращения потока или в направлении от вышеуказанной оси, т.е. к периферии потока. В последнем случае процесс продолжается до тех пор, пока максимальное значение окружной скорости W''макс в каком-то сечении потока не достигнет его критического значения Wкр, при котором еще обеспечивается вращение наиболее тяжелых частиц среды в периферийной зоне потока (фиг. 9, 10).
При дальнейшем снижении максимального значения окружной скорости W'макс (W'макс < Wкр) в сечениях потока в направлении его движения направление замещения менее тяжелых частиц среды тяжелыми изменяется на противоположное, т. е. вышеуказанное замещение происходит в направлении к оси вращения потока (фиг. 10).
Движение средней тяжести частиц газа 41, т.е. значение молекулярной массы которых находится в промежутке между значениями молекулярных масс вышеуказанных частиц 39 и 40, происходит по более сложной траектории. Эти частицы 41, совершая вращательные движения в потоке газа и перемещаясь в осевом направлении вихревой трубы 37, одновременно совершают и свои собственные спиралеобразные круговые вращения с уменьшающимся радиусом собственного вращения в направлении к оси вращения потока или к его периферии, что определяется значениями их молекулярных масс, процентным содержанием в потоке газа и местом их расположения в радиальном направлении в последнем, при этом в потоке они находятся во взвешенном состоянии, т.е. вращаются внутри потока (фиг. 8, 9). Объясняется вышеизложенное следующим. За счет полученной дополнительной кинетической энергии от тяжелых частиц 39 средней тяжести частицы 41 переходят на увеличенный радиус их вращения в потоке, но движение их в указанном направлении ограничивается приобретенной энергией, которой оказывается недостаточно для дальнейшего перемещения их по спиралеобразной траектории к внутренней поверхности вихревой трубы 37, и вследствие быстрого затухания вращательного движения потока указанные частицы 41 начинают собственное круговое вращение в вихревом потоке в направлении к оси вращения потока, так как процесс приобретения дополнительной кинетической энергии и т. д. , что описано выше, продолжается до тех пор, пока в процессе их собственного спиралеобразного вращения радиус спирали окажется равным нулю, что соответствует полному окончанию процесса разделения частиц газа в определенном сечении потока по длине вихревой трубы 37, когда частицы располагаются кольцевыми слоями в порядке возрастания их плотности в каждом последующем слое в направлении к оси вращения вихревого потока (фиг. 8, 9). На фиг. 8 и 9 траектория средней тяжести частицы 41 показана условно, так как частица 41, перемещаясь в потоке по своей траектории, одновременно совершает движение вместе с вращающимся потоком. Траекторию указанной частицы можно представить как бы в выделенном и только вращающемся вместе с потоком газа элементе объема последнего, в котором сама частица 41 совершает свои собственные вращательные движения и при этом перемещается в осевом направлении вихревой трубы 37.
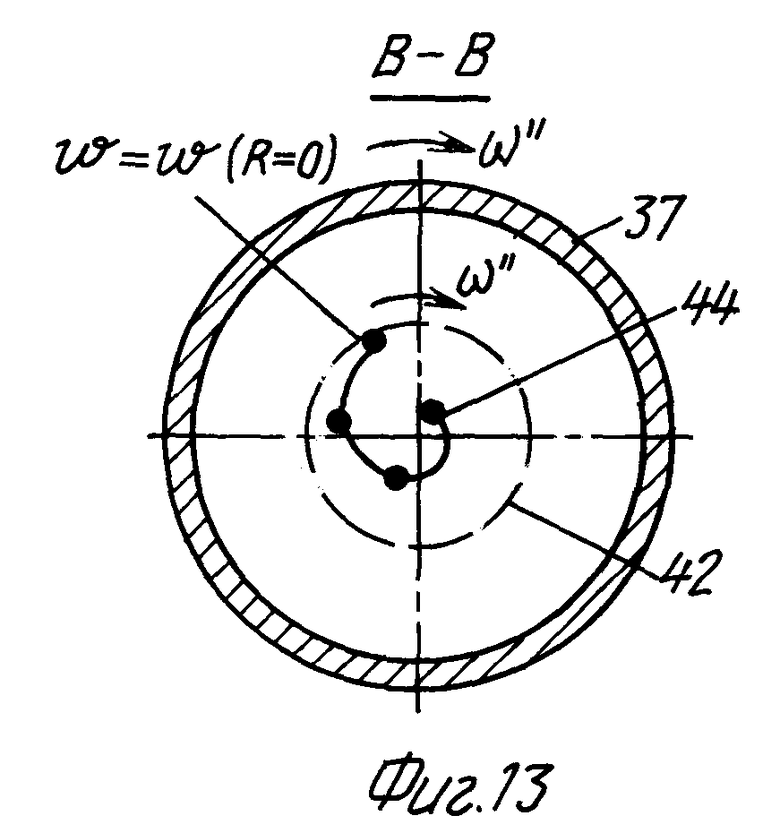
Далее для лучшего понимания физической сущности закона вращающегося тела рассмотрим следующее. Предположим, что внутри трубы 37, в которой движется свободно вращающийся поток газа (жидкости), соосно ей размещен тонкостенный полый цилиндр 42 с открытыми торцами, которому внешним воздействием обеспечивается постоянная частота вращения. В вышеуказанном вращающемся потоке имеется одна тяжелая частица 43, которая в процессе затухания вращательного движения потока перемещается одновременно вдоль оси трубы 37 (фиг. 11) и в направлении к оси вращения потока (фиг. 12). Размеры частицы бесконечно малы (молекула газа).
Если предположить, что в момент соприкосновения тяжелой частицы 43 с наружной поверхностью полого цилиндра 42 окружные скорости частицы и наружной поверхности последнего оказались равными критическому значению окружной скорости Wкр вращения частицы на данном радиусе вращения, то никакого давления на наружную поверхность полого цилиндра тяжелая частица 43 оказывать не будет. В указанный момент эта частица будет вращаться в состоянии невесомости. При прочих равных условиях, сохраняющихся в дальнейшем, на частицу не будут действовать какие-либо силы, стремящиеся сместить ее в радиальном направлении в ту или иную сторону.
Другая картина происходит в случае, когда тяжелая частица 44, вращаясь с потоком внутри тонкостенного вращающегося полого цилиндра 42, расположенного внутри вихревой трубы 37 соосно последней (фиг. 11), обладая окружной скоростью, превосходящей Wкр на радиусе внутренней поверхности указанного цилиндра 42, перемещаясь от оси вращения к периферии потока, встречается с внутренней поверхностью цилиндра 42. При указанных условиях, стремясь переместиться дальше от оси вращения, частица 44 оказывает давление на внутреннюю поверхность цилиндра 42. Если же значение окружной скорости в момент соприкосновения ее с поверхностью цилиндра оказывается одинаковым со значением окружной скорости внутренней поверхности последнего и равным ее критическому значению Wкр на данном радиусе вращения частицы, то последняя в указанный момент оказывается в состоянии невесомости при своем вращении (фиг. 13).
И если предположить, что последнее условие сохраняется неизменным, то в случае, если бы частица только вращалась, а ее осевая скорость равнялась бы нулю, то при абсолютном вакууме внутри вихревой трубы 37 и устранении контакта частицы 44 с поверхностью цилиндра 42, например, за счет его осевого смещения и при одновременном вращении с той же угловой скоростью в вихревой трубе 37 (фиг. 11), последняя в состоянии невесомости вращалась бы сколь угодно долго.
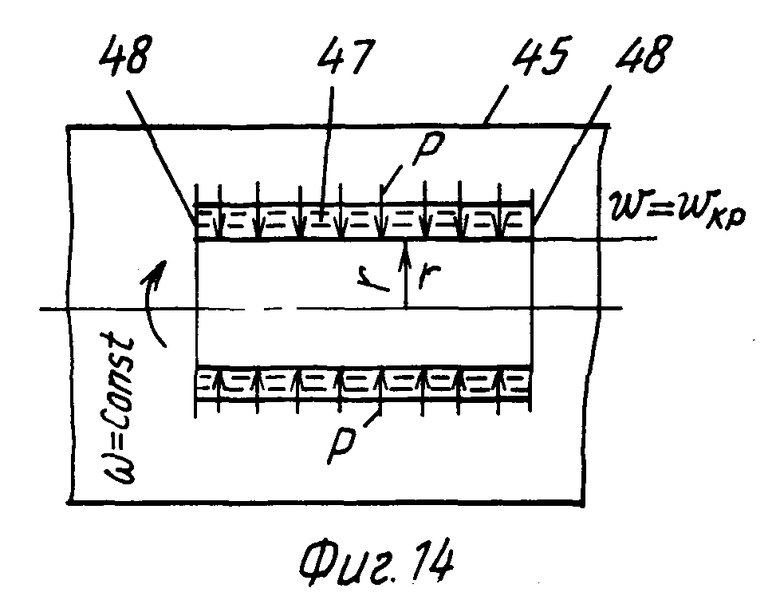
Вышерассмотренное применимо и для твердого тела, так как законы механики едины как для микромира, так и для макромира. Поэтому ниже рассмотрим следующее. Предположим, что внутри герметичной камеры, которую может выполнять труба 45 большего диаметра, размещен соосно последней меньшего диаметра тонкостенный полый цилиндр 46 (фиг. 14). Указанный цилиндр вращается с постоянной угловой скоростью ω = const, совместно с которым вращается с той же угловой скоростью кольцевой слой однородной изотропной среды (жидкости) 47, примыкающий к его наружной поверхности. Для исключения схода среды с поверхности цилиндра в направлении его оси в ту или иную сторону с каждого торца он ограничен круглой формы контрольной поверхностью 48 с отверстием в центре и выступающей в обе стороны в радиальном направлении за поверхность цилиндра 46, по крайней мере соосной цилиндру 46 (фиг. 14). В указанном случае осевая скорость среды равна нулю.
Допустим, что значение окружной скорости наружной поверхности цилиндра 46 равно критическому значению окружной скорости среды, вращающейся на радиусе r вышеуказанной поверхности цилиндра 46. В трубе 45, выполняющей роль камеры и в которой вращается полый цилиндр 46 совместно со средой 47, поддерживается абсолютный вакуум. Последнее допущение чисто условное (в реальности неосуществимое), но оно необходимо для лучшего понимания дальнейшего. Все частицы среды, как указано выше, вращаются с одной и той же угловой скоростью ω, что является справедливым для твердого тела.
При вышеуказанных условиях значение окружной скорости частиц среды, которые вращаются за пределами наружной поверхности полого цилиндра 46, точнее не контактирующих с ней, оказывается, для любого радиуса их вращения в направлении от оси цилиндра 46, меньше ее критического значения на этих же радиусах вращения среды. Поэтому вышеуказанные частицы будут стремиться переместиться в направлении к оси вращения, а так как такое перемещение невозможно, то они будут оказывать давление P на наружную поверхность цилиндра 46, как показано на фиг. 14. Причем в этом случае масса среды во всем кольцевом слое ее вращения оказывается равной массе этой же среды при отсутствии ее вращения, т.е. когда среда находится в состоянии покоя.
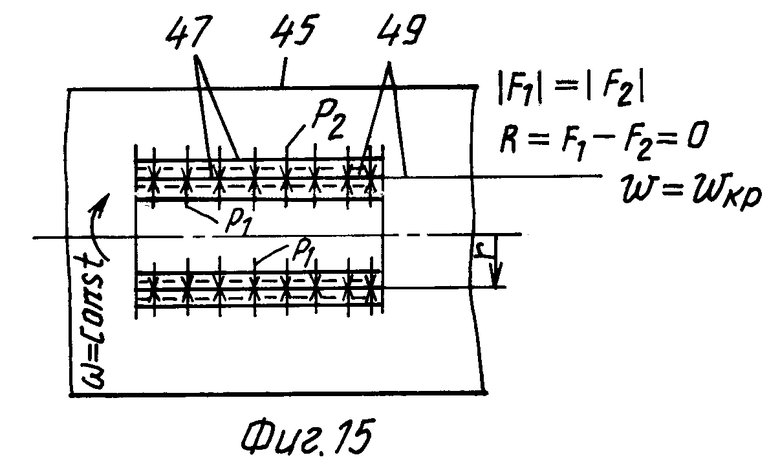
Если допустить, что полый цилиндр каким-то образом при прочих равных условиях внезапно удаляется из кольцевого слоя среды, например, путем осевого смещения с большой осевой скоростью без захвата среды вследствие поверхностного трения (идеальный случай), то в этом случае произойдет следующее. Среда сохранит кольцевую форму вращения, однако при этом под действием сил внутри кольцевого слоя среды (фиг. 14) произойдет равномерное по длине слоя последней смещение ее в направлении к оси вращения, т.е. наружный диаметр этого слоя уменьшится. Причем величина смещения в радиальном направлении всех частиц кольцевого слоя вращающейся среды в направлении к оси вращения обеспечит переход ее, как единое целое, в невесомое состояние. При этом цилиндрическая поверхность 49, образованная частицами среды 47, вращающимися со значением окружной скорости W, равной критическому ее значению Wкр на радиусе вращения, располагается внутри кольцевого слоя среды 47, а равнодействующая R результирующих сил F1 и F2, действующих на частицы по обе стороны от вышеуказанной поверхности, оказывается равной нулю (фиг. 15).
Подобное вышерассмотренному произойдет и в случае вращения среды при прочих равных условиях внутри тонкостенного полого цилиндра 46, окружная скорость внутренней поверхности которого равна критическому значению окружной скорости Wкр среды при вращении ее на радиусе указанной поверхности цилиндра 46. В данном случае направление действия сил давления P, возникающих в кольцевом слое среды 50, оказывается противоположным вышерассмотренному при вращении среды снаружи цилиндра 46, а именно под действием указанных сил частицы среды будут прижиматься к внутренней поверхности вращающегося вместе со средой цилиндра 46 (фиг. 16).
Масса рассматриваемого кольцевого слоя вращающейся среды оказывается равной массе этой же среды при ее неподвижном состоянии.
И если предположить, что каким-то образом вращающийся цилиндр 46 удаляется с места вращения вышеуказанного кольцевого слоя среды, например, осевым смещением полого цилиндра 46 (фиг. 17), то в этом случае среда, вращаясь кольцевым слоем, равномерно относительно оси вращения сместится в сторону, противоположную оси вращения (фиг. 17). При этом цилиндрическая поверхность 51, образованная частицами среды, вращающимися со значением окружной скорости, равной критическому ее значению Wкр на радиусе вращения, располагается внутри кольцевого слоя среды 50, а равнодействующая R результирующих сил F1 и F2, действующих на частицы по обе стороны от вышеуказанной поверхности, оказывается равной нулю (фиг. 17).
И если предположить, что среда для случаев, приведенных на фиг. 15 и 17, перешла из газообразного или жидкого состояния в твердое состояние, то ее вращение в абсолютном вакууме в камере 45 и при отсутствии внешних воздействий на нее может продолжаться сколь угодно долго. Причем вышеуказанное вращение будет происходить в состоянии невесомости вращающегося полого цилиндра, представляющего из себя твердое тело.
Примером перехода среды из жидкого состояния в твердое состояние может служить фазовый переход воды в лед.
И если при прочих равных условиях (фиг. 15, 17) допустить, что твердое тело, представляющее из себя вращающийся вокруг своей оси полый цилиндр, оказывается симметрично разрезанным на составные элементы путем, например, пересечения его продольными плоскостями, проходящими через ось его вращения, а также по крайней мере и поперечными оси вращения плоскостями для уменьшения размеров образующихся элементов тела, каждый образованный таким путем элемент полого цилиндра получает возможность независимого перемещения в пространстве камеры 45. Однако при прочих равных условиях, как отмечалось выше, никаких изменений во вращении теперь уже составного твердого тела и месторасположении его в камере 45 не произойдет, т.е. твердое тело, представляющее из себя составной полый цилиндр, будет вращаться как единое целое.
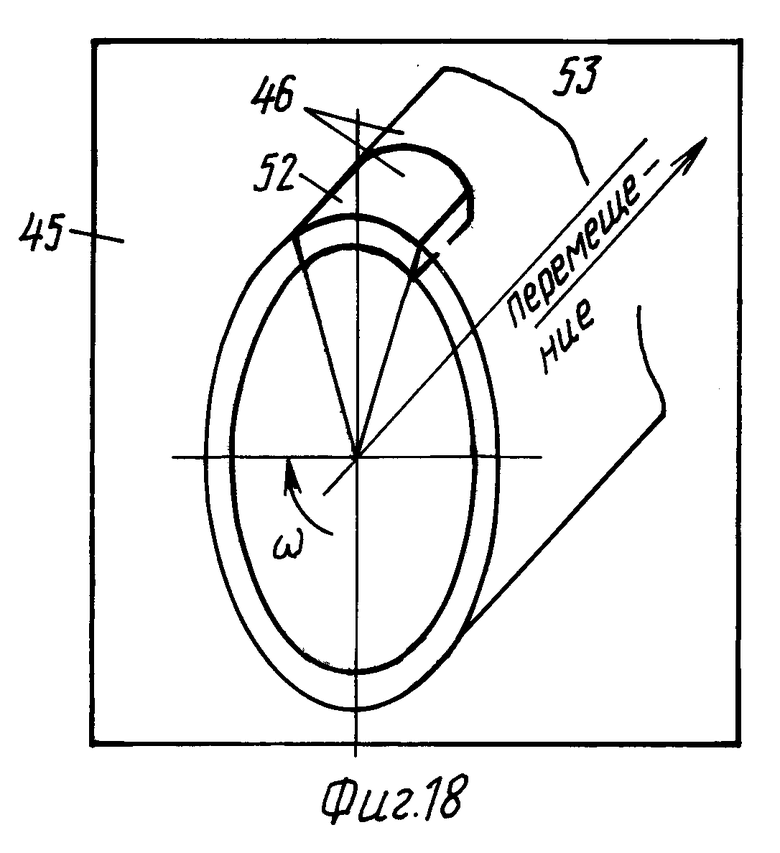
И если допустить, что каким-то образом при прочих равных условиях, т.е. без оказания на него внешнего воздействия, удалось осуществить выделение одного элемента полого цилиндра 46, представляющего из себя твердое тело 52, например, путем осевого смещения основной части 53 полого цилиндра 46 внутри камеры 45 от выделенного элемента 52 (фиг. 18), то вращение его при этом в состоянии невесомости не изменится.
Если же на вышеуказанный выделенный элемент 52, представляющий из себя твердое тело, оказывать внешние воздействия, изменяя при этом значение окружной скорости его центра массы по отношению к критическому значению указанной скорости его на радиусе вращения в невесомом состоянии (фиг. 15, 17), то выделенный элемент 52 будет в соответствии с вышеуказанным переходить на новый радиус своего вращения, на котором значение окружной скорости его центра массы окажется критическим, что будет соответствовать новому невесомому состоянию вращающегося элемента.
Задача заявленного способа и состоит в определении критического значения окружной скорости центра массы твердого тела на соответствующем радиусе его вращения, при котором достигается невесомое состояние вращающегося тела, а действующие в нем (внутри) напряжения оказываются самыми минимальными.
Таким образом, только после рассмотрения физической природы закона вращающегося тела появляется возможность понять сущность рассматриваемого способа определения критического значения окружной скорости центра массы твердого тела на соответствующем радиусе его вращения, а на этой основе и оценить перспективы его использования для решения технических и других задач.
Процесс определения вышеуказанного значения окружной скорости Wкр центра массы твердого тела на соответствующем радиусе его вращения заключается в следующем. Установив твердое тело 2 в канале 8 между ползунами 17 и 18 при выбранных характеристиках пружин 15, 16, производят измерение длин l1 и l2 обеих пружин, величина которых должна быть одинакова, т.е. l1 = l2. Фиксируют с помощью измерительного устройства 22 положение, например, внутреннего ползуна 18, которому при прочих равных условиях соответствует определенное положение второго внутреннего ползуна 17 и соответствующее значение радиуса центра массы тела, т.е. расстояние последнего от оси 12 вала 3. Затем осуществляют пуск установки.
При малых значениях частоты вращения n диска 6 с телом 2 на установленном радиусе rц.м вращения последнего, когда значение окружной скорости центра 1 массы тела 2 меньше ее критического значения Wкр, последнее будет перемещаться в направлении к оси его вращения, сжимая пружину 15, расположенную в канале 8, уменьшая тем самым ее длину l1, в то время как пружина 16 будет разжиматься, увеличивая свою длину l2 (фиг. 1, 2).
В случае достижения значения усилия сжатия пружины 16, равного нулю, вышеуказанная пружина 16 в канале 8 оказывается в свободном состоянии.
По мере увеличения частоты вращения n диска 6 с телом 2 последнее перемещается в канале 8 в направлении к периферии диска 6. При этом по достижению при перемещении внутреннего ползуна 18, под воздействием тела 2 при своем перемещении, первоначального своего положения (фиг. 1, 2), фиксируют частоту вращения n вала 3 с помощью тахометра-частотомера 5 и, зная величину радиуса rц.м вращения центра 1 массы твердого тела 2, по формуле Wкр= 2πrц.м•n определяют критическое значение окружной скорости Wкр центра 1 массы тела 2 на данном радиусе его вращения.
В случае, когда при пуске установки частота вращения n вала 3 превышает частоту, соответствующую критическому значению окружной скорости Wкр центра 1 массы тела 2 на установленном радиусе rц.м его вращения, тело 2 в канале 8 отходит от своего первоначального положения, которое оно занимало до пуска установки, в направлении к периферии диска 6. Поэтому при снижении частоты вращения вала 3 с диском 6 и телом 2 происходит перемещение последнего в направлении к оси 12 вращения вала 3.
Регулируя частоту вращения n вала 3 в сторону ее уменьшения, с помощью измерительного устройства 22 следят за моментом достижения телом 2 своего первоначального положения, которое оно занимало в канале 8 перед пуском установки. И по измеренной частоте вращения n вала 3 с диском 6 и телом 2 определяют вышеуказанным способом (по формуле) критическое значение окружной скорости Wкр центра 1 массы тела 2 на данном радиусе его вращения, для которого фиксировалась частота вращения вала 3.
Одним из самых простых способов фиксации во время вращения диска 6 момента достижения телом 2 своего первоначального положения, которое оно занимало перед пуском установки, является способ, осуществляемый с помощью контактного переключателя. В этом случае при достижении телом 2 своего первоначального положения (фиг. 1, 2) последнее установленным на нем, например, штифтом воздействует на ручку (кнопку) переключателя, замыкая измерительную цепь измерительного устройства частоты вращения вала 3. Штифт также может быть установлен и на внутреннем ползуне. Контактный переключатель крепится на подвижной планке измерительного устройства 22 (фиг. 1), имеющей возможность перемещаться в радиальном направлении диска 6. Для указанной цели могут быть использованы индуктосины или более простые на их основе индуктивные датчики, импульсные фотодатчики и другие.
Для исключения выпадения твердого тела 2 из канала 8 при больших окружных скоростях центра массы тела и больших n канал 8 со стороны, противоположной основанию 11, может с обеих сторон по его длине закрываться продольными ограничителями (пластинками) с использованием при необходимости технических решений, направленных на снижение потерь энергии на трение между последними и телом 2 в случае их соприкосновения при движении тела 2. Для этого могут использоваться разнообразные способы, обеспечивающие последнее. Конструктивные приемы, используемые для предотвращения выпадения тела 2 из канала 8, могут быть разнообразные.
Наиболее благоприятные условия, обеспечивающие максимальную точность измерений, достигаются при размещении установки для реализации рассматриваемого способа определения Wкр твердого тела 2 в вакуумной камере, которая широко используется при выполнении различного рода исследований и испытаний, включая балансировку роторов турбин и других устройств.
Для снятия характеристики изменения Wкр на каждом радиусе rц.м вращения центра 1 массы тела 2 в заданных пределах значений изменения rц.м, осуществляют регулирование величины одновременного перемещения (±X) в ту или иную сторону внешних ползунов 19, 20, обеих пружин 15, 16, внутренних ползунов 17, 18 и тела 2 для установки на каждом режиме определения критического значения окружной скорости Wкр центра 1 массы тела 2 нового значения радиуса rц.м вращения центра 1 массы тела 2 с помощью регулирующего устройства 23 величины вышеуказанного перемещения (±X) внешних ползунов 19, 20 при вращении вала 3 с диском 6, которым снабжается соединительное устройство 21 внешних ползунов 19, 20 (фиг. 1, 2, 3).
Регулирующее устройство 23, приведенное на фиг. 3, состоит из втулки 54, свободно надетой с помощью шлицевого соединения на вал 3 для обеспечения ее осевого перемещения (±Y) и вращающейся при этом вместе с валом 3, которая соединена с рычагом управления 55. С втулкой 54 жестко соединен криволинейный рычаг 56 с внутренним продольным каналом, в который своим концом входит рычаг 57 соединительного устройства 21. При перемещении втулки 54, обеспечиваемом поворотом на угол ±β рычага управления 56 вокруг неподвижной оси, в направлении к диску 6 с телом 2 соединительное устройство 21 смещает внешние ползуны 19, 20 в направлении к оси 12 вращения вала 3 (фиг. 3). При перемещении втулки 54 в противоположном вышеуказанному направлении происходит смещение ползунов 19, 20 в направлении к периферии, что, в свою очередь, приводит к соответствующему перемещению тела 2 внутри канала 8.
Регулирующее устройство 23 может быть выполнено иной конструкции.
Так как любое вращающееся вокруг "своей" оси тело одновременно при этом всегда вращается вместе с Землей вокруг оси последней с окружной скоростью центра массы тела, а точнее любой точки тела в силу несоизмеримо малых размеров тела по сравнению с размерами Земли, меньшей ее критического значения, и поэтому оно всегда притягивается к Земле, в чем и состоит сущность Закона всемирного тяготения, в связи с этим на определение Wкр в рассматриваемом способе определения критического значения окружной скорости Wкр центра массы твердого тела 2 на соответствующем радиусе rц.м его вращения земное тяготение оказывает определенное влияние. Следует отметить, что движение Земли в Галактике более сложное, чем указано выше, что и определяет направление земного тяготения к центру Земли.
Для установления вышеуказанного влияния земного притяжения на определяемое значение Wкр центра массы вращающегося тела 2, в рассматриваемом способе может быть предусмотрено осуществление регулирования угла ϕ расположения оси 12 вала 3 с диском 6 по отношению к горизонтальной плоскости для установки на соответствующем режиме определения критического значения окружной скорости Wкр центра 1 массы тела 2 необходимого значения угла ϕ, от нуля при горизонтальном расположении оси 12 вала 3 до 90o при ее вертикальном расположении, с помощью поворотного устройства 24 (фиг. 4).
Минимальное влияние земного тяготения проявляется при вращении диска 6 с твердым телом 2 в горизонтальной плоскости и количественно это влияние можно оценивать по величине энергии, затрачиваемой на преодоление сил трения о стенки канала 8, возникающих при перемещении в нем тела 2 в продольном направлении в ту или иную сторону канала 8 в зависимости от величины действующей на тело внешней силы, точнее ее знака. Целесообразным является использование облегченных внутренних ползунов 17, 18. Последнее повышает точность определения Wкр тела 2 на соответствующем радиусе его вращения.
Установка может снабжаться системой автоматического регулирования с выводом измеряемых параметров на электронно-вычислительную машину для их обработки и получения результата.
В качестве одного из примеров рассмотрим использование изобретения в газотурбостроении для решения задач, связанных с улучшением технических характеристик газовых турбин за счет уменьшения массы и повышения их надежности при эксплуатации и обеспечения возможности применения нового конструкционного материала - керамики. Последнее позволяет увеличить температуру газа на входе в турбину, а следовательно, обеспечивает более высокие экономические показатели газотурбинных установок.
Как известно, основным препятствием на пути создания высокоэкономичных металлокерамических газовых турбин является то, что керамика, хорошо работая на сжатие, не выдерживает больших напряжений на растяжение. В связи с этим изменение условий работы элементов установок, выполненных из керамики, например лопаток газовых турбин, позволяет комплексно решить для последних все вышепоставленные задачи.
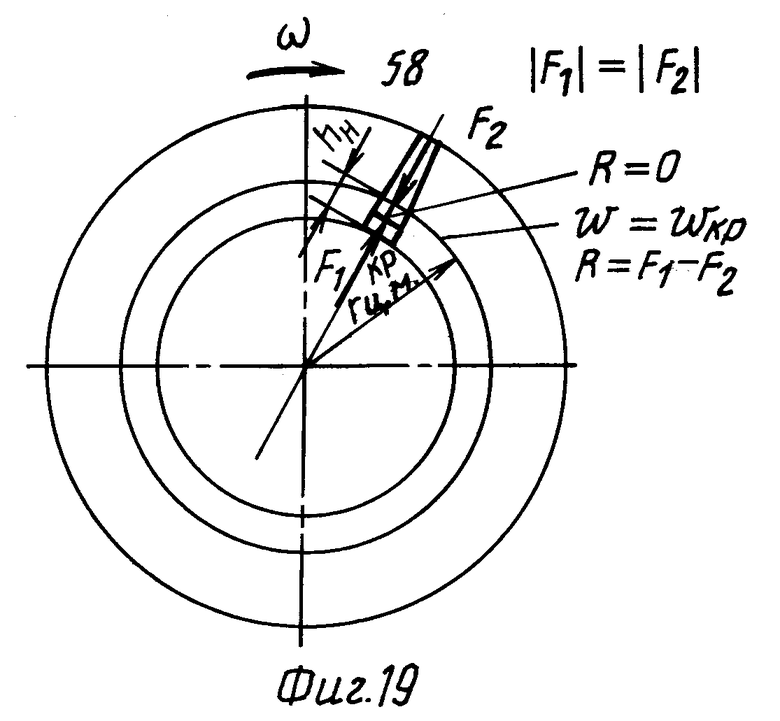
Так, зная центр массы, точнее его месторасположение, керамической рабочей лопатки, выполняют исследования, определяя частоту вращения, соответствующую критическому значению окружной скорости центра массы ее на соответствующем радиусе его вращения. Количество значений радиусов r1...rn лопатки, для которых определяется критическое значение окружной скорости Wкр.i, определяется исходя из задач проектирования. Затем с полученными результатами согласуют характеристики работающей лопатки в проектируемой установке. Если, например, при заданной частоте вращения произошло совпадение Wкр для rц.м ее с указанной частотой вращения n, то в этом случае условия работы лопатки будут самыми благоприятными, так как в этом случае при отсутствии внешних воздействий на нее лопатка будет вращаться в состоянии невесомости (фиг. 19). Внутри лопатки 58 при ее вращении с указанной частотой вращения будут действовать минимальные сжимающие и растягивающие напряжения. Причем на участке лопатки, расположенном за цилиндрической поверхностью, описанной радиусом rц.м, действуют только сжимающие напряжения (F2), а внутри указанной цилиндрической поверхности действуют только растягивающие напряжения (F1) (фиг. 19). Равнодействующая R от результирующих сил F1 и F2, действующих по обе стороны от вышеуказанной цилиндрической поверхности, равна нулю.
При прочих равных условиях такую лопатку можно дополнительно разгрузить от возникающих в ней при вращении растягивающих напряжений, удалив ее от оси вращения путем смещения в радиальном направлении центра ее массы на величину, большую или равную высоте hн нижней части лопатки 58 в радиальном направлении, расположенной внутри цилиндрической поверхности, описываемой вышеуказанным радиусом rц.м. При условиях работы лопатки в турбине, соответствующих как первому, так и второму случаю, уменьшение массы первой достигается за счет изменения конструкции, прежде всего, корневой части лопатки, которая описывается вообще разгруженной от растягивающих напряжений, так как на лопатку в этом случае не действуют силы, стремящиеся оторвать ее от обода диска, в котором она устанавливается (фиг. 20). Созданные благоприятные условия работы лопатки турбины являются залогом надежной ее работы и турбины в целом. Полностью разгрузить при прочих равных условиях лопатку от растягивающих напряжений можно также путем понижения частоты вращения турбины.
Для определения оптимальных условий работы диска турбины в канал, выполненный в диске установки для реализации рассматриваемого способа определения Wкр, устанавливается на диск турбины целиком, а его элемент, выделенный от него путем разрезания диска продольными плоскостями, пересекающимися под углом и проходящими через ось его симметрии, что в определенной мере соответствует фиг. 18. Все последующие операции определения аналогичны вышеуказанному, т.е. для рабочей лопатки.
Подходы к проведению исследований на установке для реализации способа определения Wкр, исходя из приведенного выше рассмотрения физической сущности закона вращающегося тела, могут быть самыми разнообразными.
Таким образом, изобретение позволяет на базе открытого автором закона вращающегося тела определять критическое значение окружной скорости центра массы твердого тела на соответствующем радиусе его вращения и открывает этим возможность широкого его использования при создании новой техники с вращающимися элементами с улучшенными технико-экономическими показателями для различных отраслей промышленности и, в частности, в энергетическом турбостроении, а также позволяет на его базе выполнять научные и другие исследования по решению различного рода как технических, так и иных задач, в том числе при изучении астральной системы.





Способ предназначен для использования при создании новой техники с вращающимися элементами для различных отраслей промышленности с улучшенными технико-экономическими показателями, в частности в энергетическом турбостроении, при создании новых типов летательных аппаратов, а также во многих других случаях. Вал соединяют с тахометром-частотомером. Устанавливают на вал диск. Осуществляют привод вала. В диске выполняют по меньшей мере один канал, соединяющий приосевую и периферийную зоны диска. Размещают внутри канала на расстоянии одна от другой две идентичные пружины. Каждый конец пружины упирается в свой ползун. Внутри канала между внутренними ползунами размещают тело, имеющее свободу перемещения. Внешние ползуны связывают между собой соединительным устройством для одновременного перемещения в ту или иную сторону. Осуществляют регулирование частоты вращения вала для достижения критического значения окружной скорости центра массы на соответствующем радиусе его вращения, определяемом с помощью измерительного устройства, до установления равенства длин обеих пружин. Способ открывает этим возможность широкого его использования при создании новой техники с улучшенными технико-экономическими показателями, при изучении астральной системы и решении многих других задач. 2 з.п.ф-лы. 20 ил.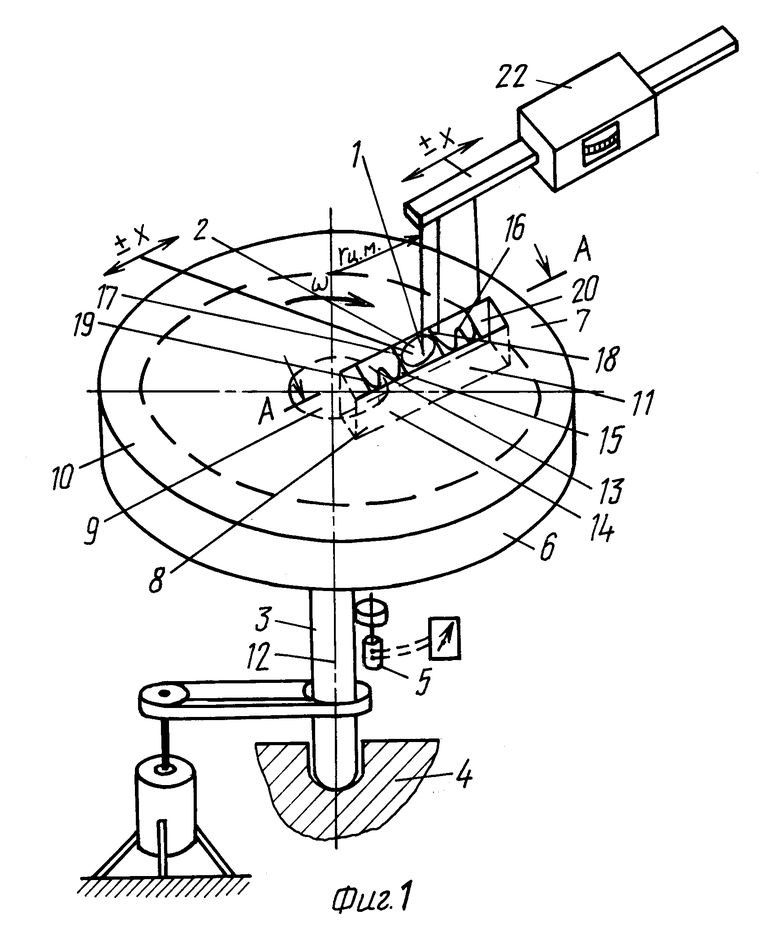
Wкр= 2πrц.м•n,
где rц.м. - радиус вращения центра массы тела, м;
n - частота вращения вала, с-1.
| Регистрирующий центробежный тахометр | 1932 |
|
SU31681A1 |
| US 3712145 A, 23.01.73 | |||
| Способ трансвагинальной блокады полового нерва при хронической тазовой боли | 2023 |
|
RU2804580C1 |

