Изобретение относится к способу, позволяющему имитировать движение планет по орбитам, в том числе и по петлеобразным, и может быть использован при изучении астральной системы, движения планет и других небесных тел, получения новых научных данных о Вселенной, для решения как научных, так и технических задач, стоящих пород космонавтикой и космической связью, при создании новых типов летательных аппаратов, а также в иных целях.
Известно средство для демонстрации планет, в авторском свидетельстве которого описан близкий к заявляемому техническому решению способ имитации движения планет, заключающийся в том, что макеты планет закрепляют на дисках, вращающихся на стойке, и приводят их во вращение приводом [1].
Недостатками прототипа в способе имитации движения планет является невозможность моделировать реальное движение последних в состоянии их невесомости при критическом значении окружной скорости центра массы тела, имитирующего планету, и невозможность имитировать движение планет по петлеобразным орбитам при одновременном вращении последних как вокруг оси, отстоящей на соответствующем расстоянии от центра массы планеты, так и вокруг собственной оси, проходящей через центр массы указанной планеты.
Цель изобретения - разработка способа, позволяющего имитировать движение планет по орбитам при изучении астральной системы, движения планет и других небесных тел, для получения новых научных данных о Вселенной, для решения как научных, так и технических задач, стоящих перед космонавтикой и космической связью, при создании новых типов летательных аппаратов.
Указанная цель достигается тем, что в известном способе имитации движения планет по орбитам, заключающемся в том, что вращают с помощью привода диск с телом, имитирующим планету, тело, имитирующее планету, устанавливают на оси внутри контейнера, размещенного внутри канала, выполненного на боковой поверхности диска, соединяющего, по крайней мере, приосевую и периферийную зоны диска и имеющего, по крайней мере, дно, расположенное в плоскости, перпендикулярной к оси вращения вала, установленного в подшипниках опоры соосно диску и соединенного жестко с ним, внутри канала в продольном его направлении размещают на расстоянии друг от друга две идентичные по своим характеристикам пружины, граничащие, по крайней мере, каждый из концов со своим ползуном, свободно перемещающимся в продольном направлении канала, между внутренними ползунами, установленными между смежными концами пружин, размещают вышеуказанный контейнер с возможностью свободного перемещения в продольном направлении канала с минимальным коэффициентом трения о поверхности контакта с последним, привод, например, электродвигатель, соединяют с валом с возможностью плавного регулирования частоты вращения последнего, изменяют силу сжатия указанных выше пружин, минимальное значение которой может равняться нулю, с помощью соединительного устройства, связывающего между собой внешние ползуны и, по крайней мере, позволяющего перемещать их в ту или иную сторону, измеряют частоту вращения вала и регулируют ее до установления равенства длин обеих пружин для достижения критического значения окружной скорости центра массы тела, имитирующего планету, на соответствующем радиусе его вращения, определяемом с помощью измерительного устройства, которое рассчитывают по формуле Wкр = 2•π•rц.м•n, где Wкр - критическое значение окружной скорости; rц.м - радиус вращения центра массы тела; n - частота вращения вала, после этого тело, имитирующее планету, приводят во вращение вокруг оси, на которой оно установлено, соединенным с осью, по крайней мере, индивидуальным приводом, регистрируют частоту его вращения вокруг оси и записывают траекторию его движения, представляющую собой, по крайней мере, петлеобразную орбиту движущейся планеты, с помощью регистрирующего устройства.
Сопоставительный анализ заявляемого технического решения с прототипом позволяет сделать вывод о наличии новых отличительных признаков, следовательно, заявляемое техническое решение соответствует критерию "новизна".
В известных науке и технике решениях нами не обнаружены совокупности отличительных признаков заявляемого решения, проявляющих аналогичные свойства и позволяющих достичь указанный в цели изобретения результат, следовательно, решение соответствует критерию изобретения "существенные отличия".
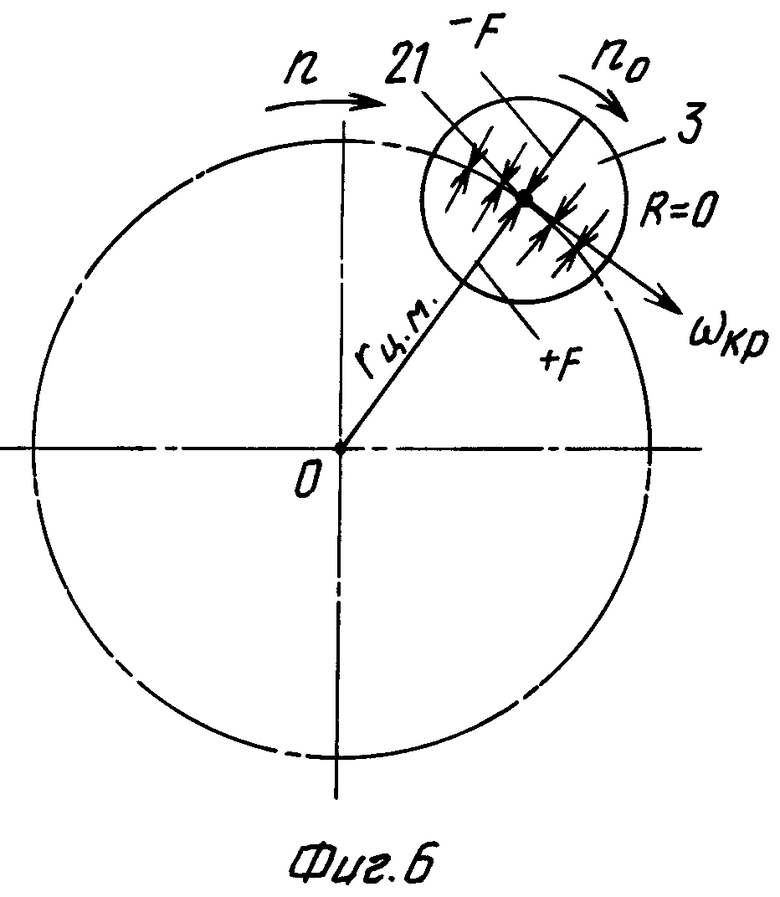
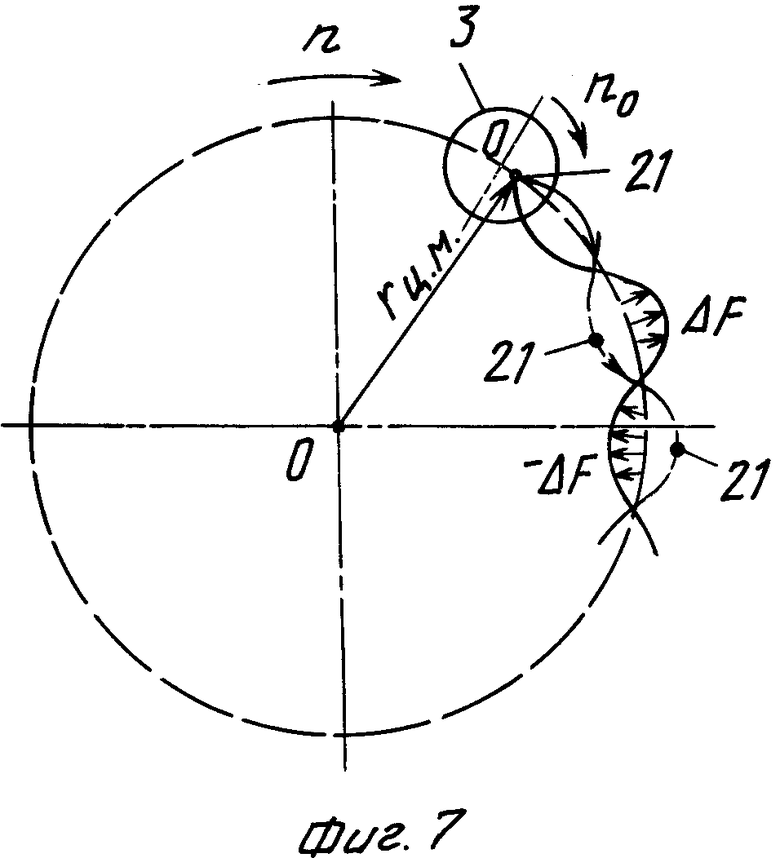
Сущность изобретения поясняется чертежами, где на фиг.1 представлена установка для имитации движения планет по орбитам; на фиг.2 - сечение по А-А на фиг. 1; на фиг.3 - регулирующее устройство; на фиг.4 - установка с поворотным устройством; на фиг.5 - установка для имитации движения планет по орбитам; на фиг.6 - схема действующих сил во вращающемся теле при Wкр его центра массы; на фиг.7 - петлеобразная орбита вращающегося тела.
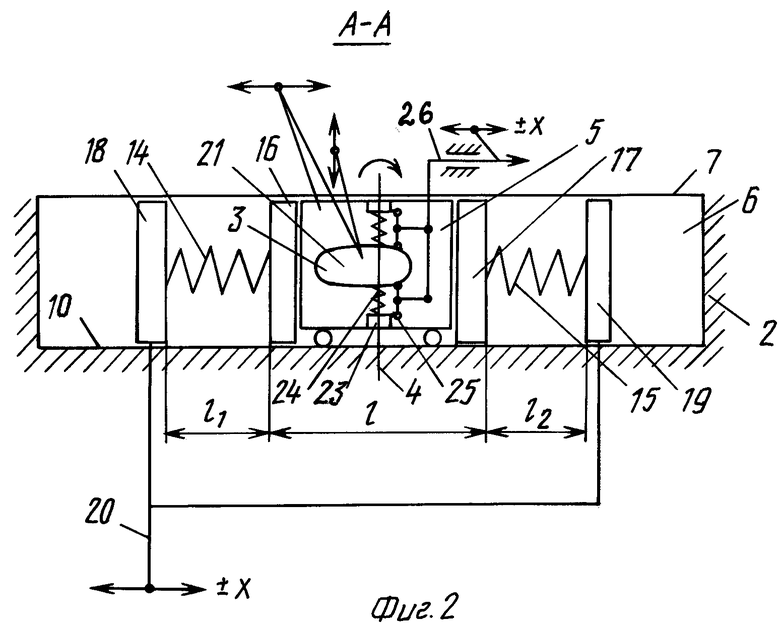
В способе имитации движения планет по орбитам (фиг.1, 2), заключающемся в том, что вращают с помощью привода 1 диск 2 с телом 3, имитирующим планету, тело 3, имитирующее планету, устанавливают на оси 4 внутри контейнера 5, размещенного внутри канала 6, выполненного на боковой поверхности 7 диска 2, соединяющего, по крайней мере, приосевую 8 и периферийную 9 зоны диска 2 и имеющего, по крайней мере, дно 10, расположенное в плоскости, перпендикулярной к оси 11 вращения вала 12, установленного в подшипниках опоры 13 соосно диску 2 и соединенного жестко с ним, внутри канала 6 в продольном его направлении размещают на расстоянии l друг от друга две идентичные по своим характеристикам пружины 14, 15, граничащие, по крайней мере, каждым из концов со своим ползуном 16, 17, 18, 19, свободно перемещающимся в продольном направлении канала 6, между внутренними ползунами 16, 17, установленными между смежными концами пружин 14, 15, размещают вышеуказанный контейнер 5 с возможностью свободного перемещения в продольном направлении канала 6 с минимальным коэффициентом трения о поверхности контакта с последним, привод 1, например, электродвигатель, соединяют с валом 12 с возможностью плавного регулирования частоты вращения n последнего, изменяют силу сжатия указанных выше пружин 14, 15, минимальное значение которой может равняться нулю, с помощью соединительного устройства 20, связывающего между собой внешние ползуны 18, 19 и, по крайней мере, позволяющего перемещать их в ту или иную сторону, измеряют частоту вращения n вала 12 и регулируют ее до установления равенства длин l1 и l2 обеих пружин 14, 15 для достижения критического значения окружной скорости Wкр центра 21 массы тела 3, имитирующего планету, на соответствующем радиусе rц.м его вращения, определяемом с помощью измерительного устройства 22, которое рассчитывают по формуле Wкр = 2•π•rц.м•n, где Wкр - критическое значение окружной скорости; rц.м - радиус вращения центра массы тела; n - частота вращения вала, после этого тело 3, имитирующее планету, приводят во вращение вокруг оси 4, на которой оно установлено, соединенным с осью 4, по крайней мере, индивидуальным приводом, регистрируют частоту его вращения n вокруг оси 4 и записывают траекторию его движения, представляющую собой, по крайней мере, петлеобразную орбиту движущейся планеты 3, с помощью регистрирующего устройства 22 (фиг.1, 2).
При этом тело 3 на оси 4 может быть установлено жестко (фиг.1, 2); тело 3, имитирующее планету, может быть установлено в контейнере 5 на установленной в подшипниках 23 контейнера 5 оси 4, по меньшей мере, параллельной оси 11 вала 12, с возможностью свободного перемещения вдоль указанной оси 4, например, за счет шлицевого соединения, а также обеспечивают свободу перемещения телу 3 путем деформирования соосно установленных пружин 24, граничащих каждая одной стороной, по крайней мере, с телом 3, а другой стороной, по крайней мере, с торцем 25 соответствующего подшипника 23, внутри которых проходят участки оси 4, расположенные по обе стороны тела 3, записывают регистрирующим устройством 22 траекторию перемещения ± y тела 3, имитирующего планету, вдоль оси 4, а до приведения оси 4 с указанных телом 3 во вращение фиксируют последнее на оси 4 устройством 26, исключающим перемещение тела 3 вдоль оси 4 (фиг.1, 2); на каждом режиме имитации движения планет может быть установлено новое значение радиуса rц.м вращения центра 21 массы тела 3, имитирующего планету, регулированием величины одновременного перемещения ± x в ту или иную сторону внешних ползунов 18, 19 с помощью регулирующего устройства 27 величины указанного перемещения ± x внешних ползунов 18,19, которым снабжают соединительное устройство 20 указанных ползунов 18, 19 (фиг.2,3); может регулированием угла ϕ расположения оси 11 вала 12 с диском 2 по отношению к горизонтальной плоскости поворотным устройством 28, устанавливаться на соответствующем режиме имитации движения планет необходимое значение указанного угла ϕ , которое может изменяться от 0o при горизонтальном расположении оси 11 вала 12 до 90o при вертикальном ее расположении (фиг.4).
Способ имитации движения планет по орбитам основан на открытом автором Всемирном законе тяготения, включающем в себя три основных закона вращающегося тела. Всемирный закон тяготения гласит: "1. Абсолютное движение всякого тела есть движение вращения. Абсолютного прямолинейного движения тел в природе не существует; такое движение может быть только при бесконечно большой скорости тела, чего достичь невозможно. Вращение тела в состоянии его невесомости при критическом значении окружной скорости его центра массы на соответствующем радиусе вращения при отсутствии внешних воздействий на него может происходить сколь угодно долго.
2. Всякое тело, свободно вращающееся вокруг оси на соответствующем удалении его центра массы от последней, при изменении окружной скорости под воздействием внешней силы изменяет радиус своего вращения на величину, соответствующую величине изменения окружной скорости центра массы тела, а именно при увеличении окружной скорости тело переходит на увеличенный радиус своего вращения, а при уменьшении окружной скорости - на уменьшенный радиус своего вращения. При этом, если тело при вращении каким-то образом удерживается от возможного перемещения в направлении к оси его вращения или в направлении от вышеуказанной оси, то при изменении окружной скорости его центра массы под воздействием внешней силы в теле возникают напряжения растяжения или сжатия, значение которых соответствует величине увеличения или уменьшения окружной скорости центра массы тела, а направление действия растягивающих или сжимающих усилий определяется местом удержания тела от вышеуказанных перемещении, которое может располагаться на стороне внутренней траектории, описываемой при вращении телом, или на стороне его внешней траектории вращения. Так, при увеличении окружной скорости центра массы тела выше ее критического значения для данного радиуса вращения и расположении места удержания тела от перемещения на стороне его внутренней траектории в теле возникают напряжения растяжения, а при расположении места удержания тела на стороне его внешней траектории в указанном случае в теле возникают напряжения сжатия, и, наоборот, при уменьшении окружной скорости центра массы тела ниже ее критического значения для данного радиуса вращения и расположении места удержания тела от перемещения на стороне его внутренней траектории в теле возникают напряжения сжатия, а при расположении места удержания тела на стороне его внешней траектории в последнем случае в теле возникают напряжения растяжения.
3. Свободное круговое вращение всякого тела вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, при одновременном вращении тела и вокруг собственной оси, проходящей через его центр массы, и отсутствии внешних воздействий на него возможно только в случае, когда тело имеет форму шара и его центр массы совпадает с центром шара; в иных случаях свободного вращения всякого тела вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, при одновременном вращении тела и вокруг собственной оси, проходящей через его центр массы, и отсутствии внешних воздействий на него в процессе вращения тела вокруг собственной оси происходит смещение центра массы тела, а вместе с ним и оси его вращения, относительно системы координат, связанной с телом, приводящее к движению тела по петлеобразной орбите".
Всемирный закон тяготения сформулирован автором на основе известных научных данных, личных наблюдений автора, ранее открытого им закона свободно вращающегося вихревого потока среды с неоднородным полем плотностей и с разной молекулярной массой компонентов [2] и выполненных автором опытных исследований.
Для реализации вышеуказанного способа имитации движения планет по орбитам в установке (фиг.1, 2) вращают с помощью привода 1 диск 2 с телом 3, имитирующим планету. При этом тело 3, имитирующее планету, устанавливают на оси 4 внутри контейнера 5, размещенного внутри канала 6, выполненного на боковой поверхности 7 диска 2. Канал 6 соединяет, по крайней мере, приосевую 8 и периферийную 9 зоны диска 2 и имеет, по крайней мере, дно 10, расположенное в плоскости, перпендикулярной к оси 11 вращения вала 12, установленного в подшипниках опоры 13 соосно диску 12 и соединенного жестко с ним. Канал 6 может иметь и меньшую длину, для чего его протяженность в направлении к приосевой зоне 8 диска 2 ограничивают. В зависимости от размеров установки для имитации движения планет и в необходимых целях канал 6 может не иметь дна 10, имея в этом случае форму щели.
Внутри канала 6 в продольном его направлении размещают на расстоянии l друг от друга две идентичные по своим характеристикам пружины 14, 15, граничащие, по крайней мере, каждым из концов со своим ползуном 16, 17, 18, 19, свободно перемещающимся в продольном направлении канала 6.
Вышеуказанный контейнер 5 размещают между внутренними ползунами 16, 17, установленными между смежными концами пружин 14, 15, с возможностью свободного перемещения ± х в продольном направлении канала 6 с минимальным коэффициентом трения о поверхности контакта с последним.
Внутренние ползуны 16,17 могут отсутствовать, при этом смежные концы пружин 14,15, обращенные друг к другу, непосредственно граничат со стенками контейнера 5, упираясь в последние при силе сжатия указанных пружин больше нуля.
С целью уравновешивания радиальных сил, возникающих при вращении вала 12 с диском 2 и контейнером 5 с телом 3 внутри последнего, может выполняться второй канал 6, расположенный симметрично относительно оси 11 вала 12, в который могут быть установлены вышеуказанные элементы, включая внешние ползуны 18, 19. Кроме того, установка может снабжаться комплектом противовесов, имеющих разную массу. Указанные противовесы размещаются на противоположной стороне диска 2 по отношению к контейнеру 5 с телом 3 симметрично относительно оси 11 вала 12.
С помощью известных способов контейнер 5 с телом 3 внутри него размещается в канале 6 таким образом, чтобы при его перемещении в последнем под воздействием внешней силы в продольном направлении канала 6 затраты энергии на преодоление сил трения о поверхности контакта с последним были минимальными. Для этой цели могут использоваться подшипники качения или опоры на этих подшипниках и другие конструктивные решения, направленные на уменьшение потерь энергии на преодоление сил трения при перемещении контейнера 5 с телом 3 в канале 6. Так, контейнер 5 может иметь с каждой из боковых сторон продольные выступы, каждый из которых входит в соответствующий продольный паз, выполненный на боковой стенке канала 6, а в зазоры между трущимися поверхностями может подаваться, смазка.
Внешние ползуны 18, 19, граничащие с концами пружин 14, 15, обращенными в противоположные стороны друг от друга, связаны между собой соединительным устройством 20, по крайней море, позволяющим перемещать одновременно в ту или иную сторону вышеуказанные ползуны 18, 19. А так как пружины 14, 15, внутренние ползуны 16, 17 и контейнер 5 с телом 3 расположены между внешними ползунами 18, 19, поэтому при перемещении внешних ползунов 18,19 первые также перемещаются в том же направлении, что и внешние ползуны 18,19.
Путем вышеуказанного одновременного перемещения внешних ползунов 18, 19 производится изменение величины радиуса rц.м. вращения тела 3, для которого при работе установки достигается критическое значение окружной скорости Wкр центра 21 массы тела 3. В зависимости от объема решаемых задач на установке по имитации движения планет по орбитам соединительное устройство 20 может выполняться без обеспечения им возможности вышеуказанного одновременного перемещения в ту или иную сторону внешних ползунов 18, 19.
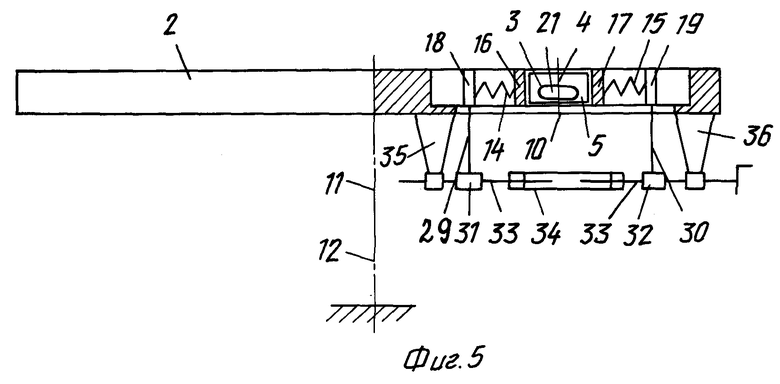
Конструктивное выполнение соединительного устройства 20 может быть различным. Один из вариантов его выполнения представлен на фиг.5. В дне 10 канала 6 в продольном его направлении выполнена прорезь, через которую внешние ползуны 18, 19 жестко соединены с одним из концов стержней 29, 30 соответственно, а к другому концу каждого стержня 29, 30 приварена втулка 31,32, через отверстие в которой проходит тяга 33 с талрепом 34, соединяющим два участка тяги 33. Сама тяга 33 установлена в опорах 35,36, закрепленных на диске 2. С опорой 35 тяга 33 соединена с возможностью свободного осевого перемещения, а с опорой 36 тяга 33 соединена резьбовым соединением таким образом, чтобы при вращении тяги 33 в ту или иную сторону (±γ) происходило ее перемещение ± x в осевом направлении, а соответственно, и внешних ползунов 18, 19 и других элементов установки, включая контейнер 5 с телом 3 внутри него.
Соединение двух участков тяги 33 с помощью талрепа 34 позволяет изменять расстояние между внешними ползунами 18, 19 и тем самым изменять силу сжатия пружин 14, 15.
Вышеуказанное конструктивное выполнение соединительного устройства 20 обеспечивает перемещение внешних ползунов 18, 19 в прямолинейном направлении.
Канал 6 диска 2 может быть выполнен с криволинейной внутренней поверхностью ее боковых стенок, что обеспечивает перемещение контейнера 5 с телом 3 в канале 6 по криволинейному направлению. В этом случае соединение участков тяги 33 с помощью талрепа 34 выполняется шарнирным с обеих ее сторон; а также может быть осуществлено шарнирное соединение стержней 29, 30 с внешними ползунами 18, 19, обеспечивающее поворот стержней вокруг своей оси внутри соединительного отверстия в каждом из ползунов 18, 19. Могут быть использованы и другие конструктивные решения для обеспечения криволинейного движения ползунов и контейнера 5 с телом 3 в канале 6.
Для предотвращения поворота участков тяги 33 относительно талрепа 34 на концы вышеуказанных участков тяги 33 устанавливаются контргайки или используются другие способы фиксации указанных элементов тяги 33 и талрепа 34.
Установка может снабжаться комплектом сменных парных пружин, каждая сменная пара которых имеет одинаковые свои характеристики, а характеристики сменных пар при этом отличаются друг от друга, что позволяет варьировать ими путем замены одних пар пружин на другие пары для более точного установления критического значения окружной скорости Wкр центра 21 массы тела 3, имитирующего планету, на соответствующем радиусе rц.м его вращения. При этом необходимо отметить, что масса контейнера 5 входит составной частью в массу тела 3.
Сила сжатия каждой из пружин 14, 15 может варьироваться в пределах от нуля и выше до целесообразного значения, определяемого опытным путем. Наличие пружин 14, 15 обеспечивает возможность стабилизации положения контейнера 5 с телом 3 на данном радиусе вращения центра 21 массы последнего при критическом значении его окружной скорости Wкр.
Характеристики выбираемого комплекта пружин 14, 15 зависят от массы тела и радиуса вращения его центра 21 массы, для которого устанавливается критическое значение окружной скорости Wкр и других условий.
Диск 2 может выполняться разнообразной конструкции, определяемой из условия обеспечения необходимой равномерности вращения контейнера 5 с телом 3, технологическими и иными требованиями. Так, диск 2 может быть сплошным, может состоять из ступицы, обода и соединяющих их ребер, а также может иметь другую форму.
При работе установки, когда происходит вращение диска 2, положение центра 21 массы тела 3 (фиг.1) определяется с помощью измерительного устройства 22, а при вращающемся теле 3 на оси 4 внутри контейнера 5, вышеуказанным устройством 22 записывается траектория движения тела 3 по углу поворота вала 12.
Привод 1, например, электродвигатель, соединяют с валом 12 с возможностью плавного регулирования частоты вращения n последнего.
В процессе использования способа имитации движения планет по орбитам изменяют силу сжатия указанных выше пружин 14, 15, минимальное значение которой может равняться нулю, с помощью соединительного устройства 20 (фиг. 2), связывающего между собой внешние ползуны 18, 19 и, по крайней мере, позволяющего перемещать их в ту или иную сторону, измеряют частоту вращения n вала 12 и регулируют ее до установления равенства длин l1 и l2 обеих пружин 14, 15 для достижения критического значения окружной скорости Wкр центра 21 массы тела 3, имитирующего планету, на соответствующем радиусе rц.м его вращения, определяемом с помощью измерительного устройства 22.
Рассмотрим вышеуказанное более подробно. Как отмечалось выше, рассматриваемый способ имитации движения планет по орбитам базируется на Всемирном законе тяготения, открытом автором, и состоит в следующем. Установив выбранное тело 3 в контейнер 5 на оси 4 внутри контейнера 5, производят измерение длин l1 и l2 обеих пружин 14, 15, величина которых должна быть одинакова независимо от установленной силы сжатия их, т.е. l1 = l2. Определяют с помощью измерительного устройства 22 положение, например, внутреннего ползуна 17, которому при прочих равных условиях соответствует определенное положение второго внутреннего ползуна 16. Затем с помощью привода 1 приводят во вращение диск 2 с контейнером 5 и телом 3 внутри последнего.
При малых значениях частоты вращения n диска 2 с контейнером 5 и телом 3, когда значение окружной скорости центра 21 массы тела 3, включая массу контейнера 5, меньше ее критического значения Wкр, контейнер 5 с телом 3 перемещается в направлении к оси 11 их вращения, сжимая пружину 14, расположенную в канале 6 ближе к оси 11 вращения вала 12 с диском 2 и контейнера 5 с телом 3, уменьшая ее длину l1. При этом длина l2 пружины 15 за счет ее освобождения от сжимающей нагрузки увеличивается.
В случае достижения значения усилия сжатия пружины 15, равной нулю, вышеуказанная пружина 15 в канале 6 оказывается в свободном состоянии.
По мере увеличения частоты вращения n диска 2 с контейнером 5 и телом 3 последние перемещаются в канале 6 в направлении к периферии диска 2. При этом по достижении при перемещении внутренним ползуном 17, под воздействием контейнера 5 с телом 3 при их перемещении, своего первоначального положения, т.е. положения перед запуском установки, когда l1 = l2, регистрируют частоту вращения n вала 12 и, зная величину радиуса rц.м вращения центра 21 массы тела 3 совместно с контейнером 5, рассчитывают критическое значение окружной скорости центра 21 массы тела 3 с контейнером 5 на данном радиусе их вращения по формуле Wкр = 2•π•rц.м•n, где Wкр - критическое значение окружной скорости; кц.м - радиус вращения центра массы тела; n - частота вращения вала.
Измерение частоты вращения вала 12 с диском 2 может производиться, например, тахометром-частотомером 37 (фиг.1) или иным измерительным устройством.
В случае, когда при приведении во вращение диска 2 с телом 3 частота вращения n вала 12 достигает большего значения, чем критическое значение окружной скорости Wкр центра 21 массы тела 3 совместно с контейнером 5 на установленном радиусе rц.м их вращения, контейнер 5 с телом 3 в канале 6 отходит от своего первоначального положения, которое контейнер 5 занимал до запуска установки, в направлении к периферии диска 2. Поэтому при снижении частоты вращения вала 12 с диском 2 и контейнером 5 с телом 3 происходит перемещение контейнера 5 в направлении к оси 11 вращения вала 12.
Регулируя частоту вращения n вала 12 в сторону ее уменьшения, с помощью измерительного устройства 22 следят за моментом достижения контейнером 5 с телом 3 своего первоначального положения, которое они занимали в канале 6 перед запуском установки. И по измеренной частоте вращения n вала 12 с диском 2 и контейнером 5 с телом 3 рассчитывают вышеуказанным способом по формуле Wкр = 2•π•rц.м•n критическое значение окружной скорости Wкр центра 21 массы тела 3 с учетом массы контейнера 5 на данном радиусе их вращения, для которого измерялась частота вращения n вала 12 (фиг.1, 2).
Для исключения выпадения контейнера 5 с телом 3 из канала 6 при больших окружных скоростях центра 21 массы тела 3 и больших n канал 6 со стороны, противоположной дну 10, может закрываться с обеих сторон по его длине продольными ограничителями (пластинами) с использованием при необходимости технических решений, направленных на снижение потерь энергии на трение между ограничителями и контейнером 5 в случаях их соприкосновения при движении контейнера 5 с телом 3 в канале 6. Для этого могут использоваться разнообразные способы, обеспечивающие последнее. Конструктивные решения, используемые для предотвращения выпадения контейнера 5 с телом 3 из канала 6 могут быть разнообразные.
После достижения путем регулирования частоты вращения n вала 12 с диском 2 критического значения окружной скорости Wкр центра 21 массы тела 3 совместно с контейнером 5 на установленном радиусе rц.м их вращения тело 3, имитирующее планету, приводят во вращение вокруг оси 4, на которой оно установлено, соединенным с осью, по крайней мере, индивидуальным приводом, регистрируют частоту его вращения n0 вокруг оси 4 и записывают траекторию его движения по углу поворота вала 12 вокруг оси 11 его вращения с помощью регистрирующего устройства 22 (фиг.1, 2). Записываемая траектория движения тела 3, имитирующего планету, может представлять собой, по крайней мере, петлеобразную орбиту движущейся планеты.
Согласно Всемирному закону тяготения, а именно третьему закону вращающегося тела, единственным исключением движению тела по петлеобразной орбите является случай кругового вращения тела вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, при одновременном вращении тела и вокруг собственной оси, проходящей через его центр массы, и отсутствии внешних воздействий на него, когда тело имеет форму шара и его центр массы совпадает с центром шара 3 (фиг.6). В этом случае равнодействующая R результирующих сил (+F и -F), действующих в теле 3 по обе стороны поверхности, описываемой образующей, проходящей через центр O' шара 3 и параллельной оси O вращения тела 3, отстоящей от его центра O' на расстоянии, равном радиусу rц.м, равна нулю, а следовательно, тело 3 в указанном случае находится в состоянии невесомости.
В связи с этим вращение тела 3 вокруг собственной оси O', проходящей через его центр массы, в последнем случае никакого влияния не оказывает на характер орбиты тела, которая сохраняется круговой.
Относительно свободного вращения тела 3 вокруг оси 11 (O), отстоящей на соответствующем расстоянии от его центра массы (фиг. 1, 2, 6), в земных условиях следует отметить следующее. Свободное движение тела в указанных условиях из-за наличия атмосферы вокруг Земли без затраты энергии на преодоление сопротивления движению тела, создаваемого воздухом атмосферы при вращении последнего, невозможно. Поэтому свободное вращение тела в рассматриваемом способе имитации движения планет по орбитам достигается поддержанием постоянной частоты вращения n вала 12 с диском 2 и контейнером 5 с телом 3. В данном случае на вращение только контейнера 5 с телом 3 при Wкр центра 21 массы тела 3 затрачивается лишь энергия, компенсирующая внешнее воздействие на контейнер 5 с телом 3, вызываемое сопротивлением встречного воздуха вращению первых, благодаря чему искусственным путем обеспечивается свободное вращение контейнера 5 с телом 3.
Уменьшение тормозящего воздействия окружающего воздуха при вращении контейнера 5 с телом 3 достигается использованием различных мер, одной из которых может быть применение обтекателей для воздушного потока, вызываемого вращением вала 12 с диском 2 и контейнером 5 с телом 3, установленных на диске 2. Также могут быть использованы и другие меры для выполнения указанной выше цели, как, например, размещение установки для имитации движения планет по орбитам в вакуумной камере, широко используемой при выполнении различного рода исследований и испытаний, включая балансировку роторов турбин и других устройств.
В случаях, когда тело 3 имеет форму, отличающуюся от формы шара, а также, когда тело 3 имеет форму шара, но при этом центр 21 массы тела 3 не совпадает с центром шара O', свободное вращение тела 3 вокруг оси O, отстоящей на соответствующем расстоянии от его центра 21 массы, при одновременном вращении тела 3 и вокруг собственной оси, проходящей через его центр 21 массы, и отсутствии внешних воздействий на него в процессе вращения тела 3 (в нашем случае совместно с контейнером 5 как единым целым) происходит смещение центра 21 массы тела 3, а вместе с ним и оси его вращения, относительно системы координат, связанной с телом 3, что и приводит к движению тела 3 (с контейнером 5) по петлеобразной орбите (фиг.6, 7).
На фиг.7 показано направление избыточных результирующих усилий ΔF и -ΔF, возникающих в теле 3 при смещении его центра 21 массы к оси O или в направлении от оси O соответственно. Возникновением таких усилий на планете Земля, делающей за одни сутки один полный оборот вокруг собственной оси, а указанные усилия возникают при этом дважды в сутки, и объясняется причина происходящих приливов, которые происходят также дважды в сутки. Возникновением избыточных внутренних усилий в самой Земле, включая и ее атмосферу, объясняются и суточные колебания атмосферного давления, а также многие другие явления, происходящие на Земле [3].
Направление вращения тела 3 вокруг оси 4, на которой оно закреплено в контейнере 5, может варьироваться благодаря использованию соответствующего привода, позволяющего изменять направление вращения оси 4. Отсюда наиболее целесообразным приводом является индивидуальный привод оси 4 от электродвигателя, который независимо от частоты вращения вала 12 обеспечивает при этом возможность устанавливать необходимую частоту вращения оси 4 с телом 3. Возможны и другие варианты приведения во вращение оси 4 с телом 3, в том числе и приводом вала 12. Однако следует при этом отметить, что использование привода вала 12 одновременно и для приведения во вращение оси 4 с телом 3 является весьма сложной технической задачей. Поэтому его использование возможно в исключительных случаях, например, при использовании рассматриваемого способа имитации движения планет по орбитам в демонстрационных целях.
В зависимости от объема решаемых задач при использовании вышеуказанного способа имитации движения планет тело 3 на оси 4 может устанавливаться жестко (фиг.1, 2). Ниже будет показано, что при жесткой установке тела 3 на оси 4, т.е. когда исключается при вращении тела 3 на оси 4 его перемещение вдоль последней, а центр массы 21 тела 3 при этом эксцентрично смещен относительно оси 4, движение тела 3 происходит по петлеобразной траектории (орбите), причем траектория движения центра 21 массы тела 3 располагается в плоскости, перпендикулярной к оси 11 вала 12.
Для создания условий движения тела 3 по пространственной петлеобразной траектории (орбите) последнее должно иметь свободу перемещения ± y вдоль оси 4 в ту или иную сторону (фиг.2).
С целью расширения возможностей рассматриваемого способа имитации движения планет по орбитам в установке для реализации способа тело 3, имитирующее планету, устанавливают в контейнере 5 на установленной в подшипниках контейнера 5 оси 4 по меньшей мере параллельной оси 11 вала 12, с возможностью свободного перемещений вдоль указанной оси 4, например, за счет шлицевого соединения, а также обеспечивают свободу перемещения телу 3 путем деформирования соосно установленных пружин 24 (фиг.1, 2).
Вышеуказанные пружины 24 граничат каждая одной стороной, по крайней мере, с телом 3, а другой стороной, по крайней мере, с торцем 25 соответствующего подшипника 23, внутри которых проходят участки оси 4, расположенные по обе стороны тела 3.
Место установки подшипников 23 в контейнере 5 определяется расположением оси 4 по отношению к оси 11 вала 12, которое может быть но только параллельным по отношению к оси 11 вала 12, но и ось 4 может быть расположена под любым необходимым в исследованиях углом.
В процессе выполнения имитации движения планет по орбитам записывают регистрирующим устройством 22 траекторию перемещения ± y тела 3, имитирующего планету, вдоль оси 4, а до приведения оси 4 с указанным телом 3 во вращение фиксируют последнее на оси 4 устройством 26, исключающим перемещение тела 3 вдоль оси 4 (фиг.1, 2). Исключение перемещения тела 3 вдоль оси 4 до приведения во вращение последней с телом 3 обеспечивает более точную установку критического значения окружной скорости Wкр центра 21 массы тела 3 при осуществлении регулирования частоты вращения n вала 12 с диском 2 и размещенного на последнем контейнера 5 с телом 3.
Установка для имитации движения планет по орбитам может не иметь указанного устройства 26, что зависит от объема решаемых на ней задач, а также расположения оси 4, на которой устанавливается тело 3 в контейнере 5, по отношению к оси 11 вала 12.
При расположении оси 4 тела 3 в контейнере 5 со смещенным центром 21 массы последнего относительно первой 4, параллельно оси 11 вала 12 с диском 2 при вращении последнего и одновременном вращении тела 3 как вокруг оси 11, так и вокруг оси 4, на которой оно установлено внутри контейнера 5, движение тела 3 происходит по петлеобразной траектории (орбите), причем траектория движения центра 21 массы тела 3 располагается в плоскости, перпендикулярной к оси 11 вала 12.
В случае смещения центра 21 массы тела 3 относительно оси 4 его вращения и расположении последней под углом к оси 11 вала 12 при одновременном вращении тела 3 как вокруг оси 11, так и вокруг оси 4, на которой тело 3 установлено в контейнере 5, движение тела 3 происходит по пространственной петлеобразной траектории (орбите), что обеспечивается в дополнение к свободному перемещению тела 3 с контейнером 5 в канале 6 свободой перемещения ± y тела 3 вдоль оси 4 в ту или иную сторону (фиг.2) за счет деформации пружин 24 в направлении, совпадающем с направлением оси 4, на которой тело 3 установлено в контейнере 5. С помощью регистрирующего устройства записывается траектория вышеуказанного перемещения ± y по углу поворота оси 4 тела 3 вдоль шлицевого соединения с вышеуказанной осью 4 (фиг.2).
Обеспечение свободного перемещения ± y тела 3 в направлении, совпадающем с осью 4, на которой оно установлено в контейнере 5, может достигаться и иными конструктивными решениями.
Установка для имитации движения планет по орбитам может снабжаться системой автоматического регулирования с выводом измеряемых параметров на электронно-вычислительную машину для их обработки и выдачи результатов исследования.
Концы пружин 24 могут опираться на пружинные шайбы, каждая из которых граничит с телом 3 и с подшипником 23 (фиг.2).
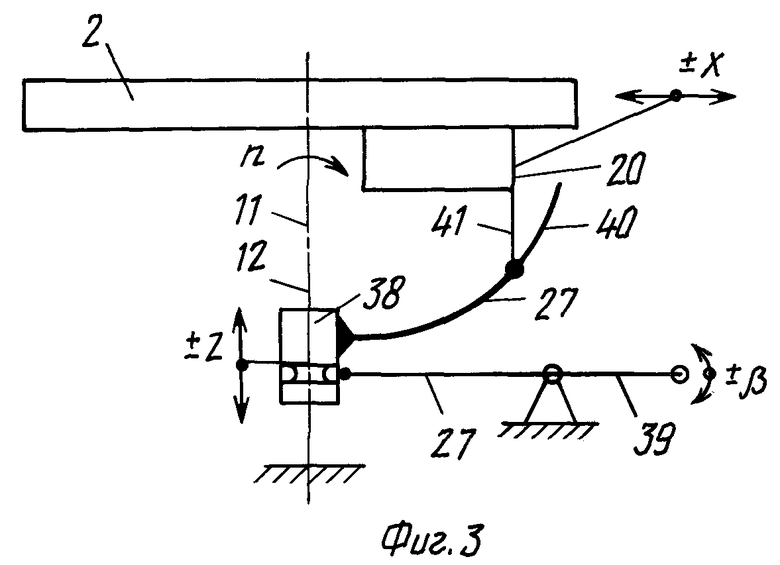
Для возможности имитации движения планет на разных радиусах rц.м вращения центра массы тела 3, в заданных пределах значений изменения rц.м, на каждом режиме вышеуказанной имитации устанавливают новое значение радиуса rц.м вращения центра 21 массы тела 3, имитирующего планету, регулируя величину одновременного перемещения ± x в ту или иную сторону внешних ползунов 18, 19 с помощью регулирующего устройства 27 величины указанного перемещения ± x внешних ползунов 18, 19 (фиг.2, 3). Для выполнения последнего вышеуказанным регулирующим устройством 27 снабжают соединительное устройство 20 ползунов 18, 19.
Регулирующее устройство 27, приведенное на фиг.3, состоит из втулки 38, свободно надетой с помощью шлицевого соединения на вал 11 для обеспечения ее осевого перемещения и вращающейся при этом вместе с валом 11, которая соединена с рычагом управления 39. С втулкой 38 жестко соединен криволинейный рычаг 40 с внутренним продольным каналом, в который своим концом входит рычаг 41 соединительного устройства 20. При перемещении втулки 38 в направлении к диску 2 с контейнером 5 и телом 3 соединительное устройство 20 смещает внешние ползуны 18, 19 в направлении к оси 11 вращения вала 12 (фиг.3), а при перемещении втулки 38 в направлении противоположном вышеуказанному направлению происходит смещение ползунов 18, 19 в направлении к периферии 9 диска 2, что в свою очередь приводит к соответствующему перемещению контейнера 5 с телом 3 внутри последнего в канале 6.
Рассмотренное регулирующее устройство 27 позволяет производить регулировку величины одновременного вышеуказанного перемещения ± x внешних ползунов 18, 19 как при вращающемся вале 12 с диском 2, так и при их неподвижном состоянии.
Первое особенно важно при выполнении большой программы испытаний, связанной соответственно с широким диапазоном изменения значений радиусов rц.м вращения центра 21 массы тела 3 и во многих других случаях.
Регулирующее устройство 27 может быть выполнено иной конструкции.
Так как любое вращающееся вокруг своей оси тело при этом одновременно вращается и вместе с Землей, совершая такие же вращательные движения, какие совершает Земля, а окружная скорость центра массы вышеуказанного тела, а точнее любой точки тела, имеет значения меньше ее критического значения, поэтому тело всегда притягивается к Земле. Иными словами, тело, лежащее на Земле, оказывается удерживаемым от перемещения в направлении к оси вращения (центру) Земли, что вызывает в теле появление сжимающих усилий. И чем больше эти сжимающие усилия, определяемые разностью Wкр - W (W - действительное значение окружной скорости вращения тела вместе с Землей), тем, соответственно, и больше масса тела. Таким образом, изменяя положение тела по отношению к оси вращения Земли (точнее к центру ее вращения из-за сложного характера движения - вращения) при прочих равных условиях, можно изменять массу тела. Изложенным определяется сущность "земного тяготения", вызываемого не какими-то особыми свойствами веществ, образующих Землю, а заключающегося в ее вращательном сложном движении.
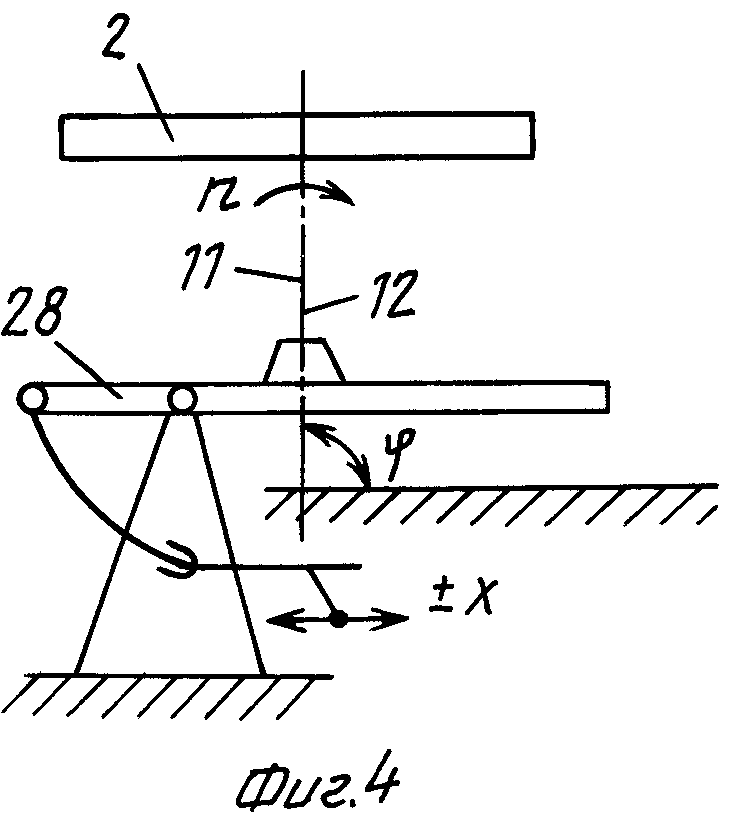
В связи с этим на достижение в процессе регулирования частоты вращения n вала 12 с диском 2 на соответствующем режиме имитации движения планеты более точного значения критического значения окружной скорости Wкр центра 21 массы тела 3 (включая и массу контейнера 5) "земное тяготение" оказывает определенное влияние. Для установления вышеуказанного влияния "земного притяжения" на устанавливаемое значение Wкр центра 21 массы вращающего вокруг оси 11 вала 12 тела 3, размещенного в контейнере 5, для соответствующего режима имитации движения планеты рассматриваемый способ может осуществляться регулированием угла ϕ расположения оси 11 вала 12 с диском 2 по отношению к горизонтальной плоскости.
С этой целью установка для имитации движения планет по орбитам снабжается поворотным устройством 28 (фиг.4), которое позволяет изменять вышеуказанный угол ϕ в пределах от 0o при горизонтальном расположении оси 11 вала 12 до 90o при вертикальном ее расположении как при вращающемся вале 12 с диском 2, так и при их неподвижном состоянии.
Первое особенно важно, так как позволяет при прочих равных условиях с максимальной точностью зафиксировать в процессе изменения угла ϕ на любом установленном режиме вращения вала 12 с диском 2, определяемом соответствующим значением частоты вращения n вала 12 вплоть до достижения n, при которой значение окружной скорости центра 21 массы тела 3 для установленного значения rц.м равно Wкр.
Конструкция поворотного устройства 28 может быть разнообразной, определяемой габаритами установки, объемом решаемых задач при ее использовании для реализации рассматриваемого способа имитации движения планет по орбитам, технологическими и другими условиями.
Влияние "земного тяготения" количественно можно оценивать по величине оказываемого при вращении контейнера 5 с телом 3 вокруг оси 11 вращения вала 12 давления на дно 10 канала 6. Для этого установка может снабжаться дополнительными измерительными средствами, позволяющими регистрировать все необходимые для исследований величины (параметры).
В процессе регулирования частоты вращения n вала 12 с диском 2 и контейнером 5 с телом 3 для установления критического значения окружной скорости Wкр центра 21 массы тела 3 (фиг.1) с приближением последней к Wкр роль "земного тяготения" на точность установки Wкр уменьшается, а при достижении Wкр влияние "земного тяготения" сводится к нулю. Объясняется последнее следующим. При регулировании частоты вращения n вала 12 и достижении при этом телом 3 совместно с контейнером 5 Wкр значение результирующей всех сил, действующих в теле 3, равно нулю (R = 0). В этом случае тело 3 совместно с контейнером 5 становится невесомым по отношению к внешней среде, в связи с чем на тело действие "земного тяготения" не должно проявляться (фиг. 6).
Так, Луна, вращаясь вокруг Земли с окружной скоростью ее центра массы, равной критической, по отношению к внешней среде (космосу) является невесомой и равнодействующая R всех внутренних сил Луны равна нулю, что и обеспечивает при отсутствии внешних воздействий неизменность ее орбиты, по которой она совершает свои движения. Вращение других планет Солнечной системы также происходит при критическом значении окружной скорости Wкр их центра массы.
Таким образом, изобретение позволяет путем моделирования осуществить экспериментальную проверку открытого автором Всемирного закона тяготения и открывает возможность широкого его использования при изучении астральной системы, для получения новых научных данных о Вселенной, для решения научных и технических задач, стоящих перед космонавтикой, космической связью, открывает путь к созданию новых типов летательных аппаратов, а также может использоваться в иных целях.
Источники информации
1. А.С. СССР 144054, кл. G 09 В 27/06, опубл. в бюл. N 1, 1962 (прототип).
2. Патент РФ N 2084793, кл. F 28 D 7/10, 1997.
3. Ричард Фейнман. Характер физических законов. Пер. с англ., под род. Я.А. Смородинского. Изд-во "Мир", М., 1968, с.9-34.
Изобретение может быть использовано при изучении астральной системы, движения планет и других небесных тел. Способ заключается в том, что вращают с помощью привода диск с телом, имитирующим планету. Тело устанавливают на оси внутри контейнера, размещенного внутри канала, выполненного на поверхности диска. Внутри канала размещают две идентичные пружины. Между внутренними ползунами, установленными между смежными концами пружин, размещают контейнер с возможностью перемещения. Изменяют силу сжатия пружин с помощью соединительного устройства, связывающего внешние ползуны и позволяющего перемещать их. Измеряют частоту вращения вала и регулируют ее до установления равенства длин обеих пружин для достижения критического значения окружной скорости центра массы тела на соответствующем радиусе его вращения. После этого тело приводят во вращение вокруг оси, на которой оно установлено, регистрируют частоту его вращения вокруг этой оси и записывают траекторию его движения. Данный способ позволяет имитировать движение планет по петлеобразным орбитам. 4 з.п. ф-лы, 7 ил.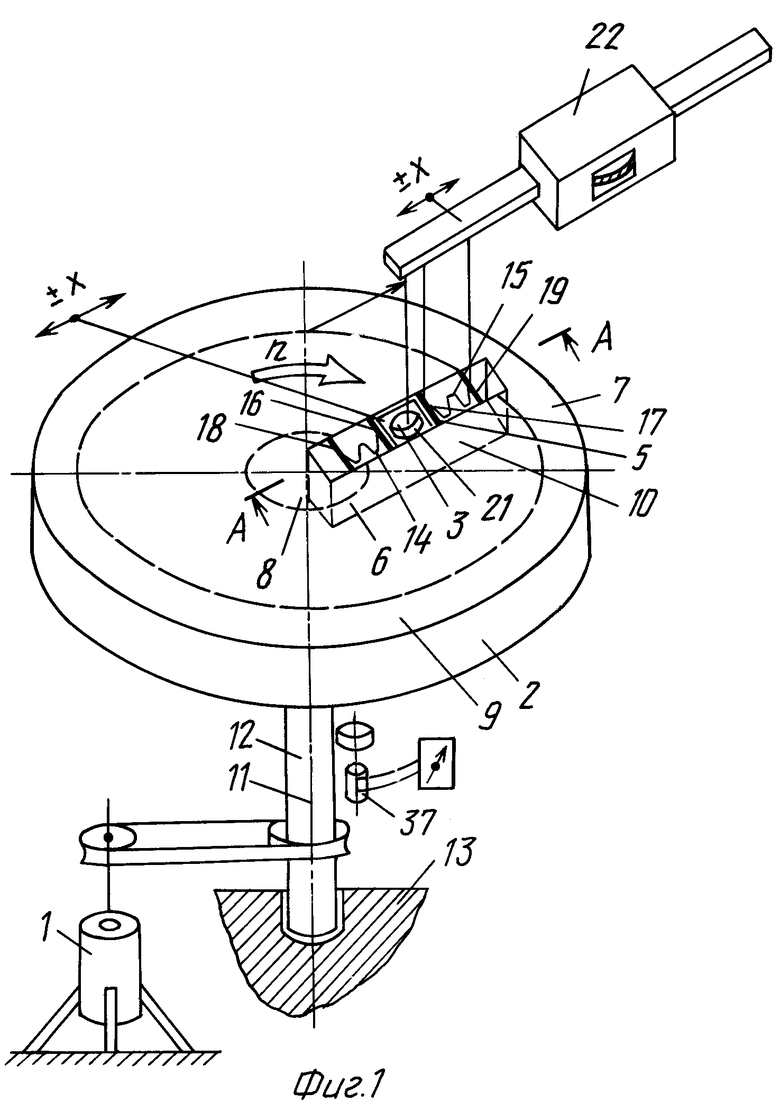
Wкр= 2•π•rц.м•n,
где Wкр - критическое значение окружной скорости;
rц.м. - радиус вращения центра массы тела;
n - частота вращения вала,
после этого тело, имитирующее планету, приводят по вращение вокруг оси, на которой оно установлено, соединенным с осью приводом, регистрируют частоту его вращения вокруг оси и записывают траекторию его движения, представляющую собой петлеобразную орбиту движущейся планеты, с помощью регистрирующего устройства.
| Учебное пособие по астрономии | 1960 |
|
SU144054A1 |
| US 3521384 A, 21.07.70 | |||
| RU 95108173 A1, 20.12.96 | |||
| Учебный прибор по астрономии | 1984 |
|
SU1233207A1 |
| УСТРОЙСТВО ПРИОРИТЕТНОГО ОБСЛУЖИВАНИЯ ЗАПРОСОВ | 2001 |
|
RU2207615C2 |
| US 3974577 A, 17.08.76. | |||

