Изобретение относится к способу определения изменения массы ротационного устройства в зависимости от изменения его частоты вращения и радиальных сил, передаваемых шейками ротационного устройства на подшипники, в разных диаметральных продольных плоскостях ротационного устройства в зависимости от угла его поворота вокруг оси при соответствующей частоте его вращения, открывающему ранее неизвестные в науке вышеуказанные физические явления, физическую природу вибрации оборотной частоты, низкочастотной и высокочастотной вибрации ротационного устройства и позволяющему получить необходимые данные для корректировки существующих расчетов на прочность ротационного устройства, и может быть использовано для улучшения вибрационных характеристик, улучшения массовых показателей (облегчения) новой техники с вращающимися элементами для различных отраслей промышленности, расширения возможностей по использованию новых конструкционных материалов при их создании и, в частности, в энергетическом и транспортном турбостроении, а также для решения различного рода как технических, так и научных задач и в других случаях.
Физические явления, заключающиеся в изменении массы ротационного устройства в зависимости от изменения его частоты вращения и радиальных сил, передаваемых шейками ротационного устройства на подшипники, в разных диаметральных продольных плоскостях ротационного устройства в зависимости от угла его поворота вокруг оси при соответствующей частоте его вращения, открыты автором, поэтому и не обнаружено аналогов, имеющих назначение - определение изменения массы ротационного устройства в зависимости от изменения его частоты вращения и радиальных сил, передаваемых шейками ротационного устройства на подшипники, в разных диаметральных продольных плоскостях ротационного устройства в зависимости от угла его поворота вокруг оси при соответствующей частоте его вращения.
Цель изобретения - открытие на базе его использования ранее неизвестных в науке физических явлений, заключающихся в изменении массы ротационного устройства в зависимости от изменения его частоты вращения и в уменьшении давления шеек ротационного устройства на подшипники при приведении последнего во вращение, физической природы вибрации оборотной частоты, низкочастотной и высокочастотной вибрации и на их основе улучшение технических характеристик двигателей и других механизмов с вращающимися элементами, входящими в их состав: улучшение вибрационных характеристик, уменьшение их массовых показателей (облегчение), повышение надежности в работе, расширение возможностей использования новых конструкционных материалов и решение других как технических, так и научных задач, корректировка существующих расчетов на прочность вышеуказанных элементов.
Указанная цель достигается тем, что в способе определения изменения массы ротационного устройства в зависимости от изменения его частоты вращения и радиальных сил, передаваемых шейками ротационного устройства на подшипники, в разных диаметральных продольных плоскостях ротационного устройства в зависимости от угла его поворота вокруг оси при соответствующей частоте его вращения, включающем размещение ротационного устройства по меньшей мере на одной грузоприемной платформе по меньшей мере одного устройства для измерения массы, содержащего массоизмерительный преобразователь, подключенный к измерительному блоку, а также блок управления и блок автоматической коррекции, при этом установка для реализации способа размещена в вакуумной камере, размещенное в подшипниках ротационное устройство установлено на грузоприемной платформе устройства для измерения массы с возможностью его вращения с помощью привода, вал которого связан с одним из концов ротационного устройства с помощью соединительного устройства, обеспечивающего при измерении массы ротационного устройства в процессе изменения режимов его вращения необходимую свободу перемещения совместно с грузоприемной платформой и разобщение ротационного устройства от привода при измерении массы ротационного устройства при соответствующей частоте его вращения, измеряемой тахометром-частотомером, соединенным с ротационным устройством, каждый из подшипников ротационного устройства размещен внутри цилиндрической обоймы, снабженной двумя датчиками, включенными в цепь измерительного блока и расположенными друг против друга симметрично относительно оси ротационного устройства между наружной поверхностью подшипника и внутренней поверхностью обоймы в диаметральной продольной плоскости ротационного устройства, являющейся плоскостью симметрии указанных датчиков, при этом каждый из подшипников размещен в обойме с возможностью свободного перемещения в направлении, совпадающем с диаметральной осью симметрии ротационного устройства, лежащей в плоскости симметрии датчиков в ту или иную сторону, обойма каждого подшипника выполнена двойной с возможностью поворота ее внутренней части совместно с подшипником и датчиками вокруг оси ротационного устройства относительно наружной части ее в каждую из двух сторон на угол не менее 90oотносительно диаметральной продольной плоскости отсчета ротационного устройства для измерения радиальных сил в разных диаметральных продольных плоскостях ротационного устройства, снабженного отметчиками угла его поворота с выводом сигнала на регистрирующее устройство, для определения изменения массы ротационного устройства в зависимости от изменения частоты его вращения вначале устройством для измерения массы измеряют массу ротационного устройства в неподвижном состоянии, после приведения ротационного устройства во вращение путем регулирования частоты его вращения на каждом из режимов измеряют максимальное и минимальное значения масс ротационного устройства, регистрируемые измерительным блоком за период одного оборота его вокруг своей оси, изменение массы на каждом режиме определяют как разность между значением массы ротационного устройства, измеренной в неподвижном состоянии, и значением полусуммы максимальной и минимальной масс ротационного устройства на соответствующем режиме его вращения, на основании полученных результатов определяют режимы измерения радиальных сил, передаваемых шейками ротационного устройства на подшипники, а радиальные силы, передаваемые шейками ротационного устройства на подшипники, в разных диаметральных продольных плоскостях ротационного устройства в зависимости от угла поворота ротационного устройства вокруг своей оси при соответствующей частоте его вращения измеряют путем регулирования угла поворота внутренней части обоймы совместно с подшипником и двумя датчиками, расположенными друг против друга симметрично относительно оси ротационного устройства, и частоты вращения ротационного устройства.
Отсутствие аналогов заявляемому техническому решению позволяет сделать вывод о том, что заявляемое техническое решение соответствует критерию "новизна".
В известных науке и технике решениях нами не обнаружены совокупности признаков заявляемого решения, проявляющих аналогичные свойства и позволяющих достичь указанный в цели изобретения результат, следовательно, решение соответствует критерию изобретения "существенные отличия".
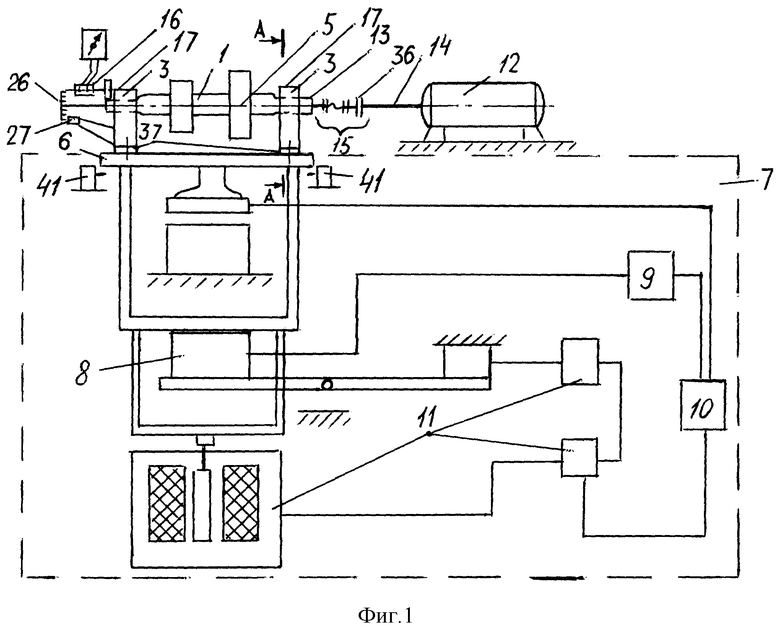
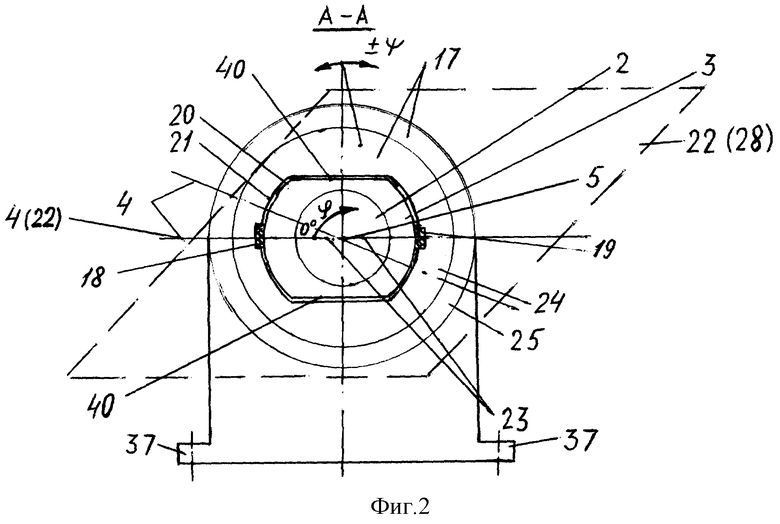
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена установка для определения массы ротационного устройства и радиальных сил, передаваемых шейками ротационного устройства на подшипники; на фиг. 2 - сечение по А-А фиг. 1, на фиг. 3 - установка для определения изменения массы ротационного устройства и радиальных сил, передаваемых шейками ротационного устройства на подшипники; на фиг. 4 - установка для определения изменения массы ротационного устройства и радиальных сил, передаваемых шейками ротационного устройства на подшипники; на фиг. 5 - фрагмент выполнения ограничительного устройства; на фиг. 6 - фрагмент участка вихревой трубы с завихрителем потока; на фиг. 7 - сечение по Б-Б фиг. 6; на фиг. 8 - сечение по Б-Б фиг. 6; на фиг. 9 - вихревая труба с соосно размещенным внутри нее тонкостенным полым цилиндром; на фиг. 10 - сечение по В-В фиг. 9; на фиг. 11 - сечение по В-В фиг. 9; на фиг. 12 - иллюстрация действующих сил внутри жидкости на наружную поверхность вращающегося совместно с жидкостью пустотелого цилиндра; на фиг. 13 - иллюстрация действующих сил внутри вращающейся жидкости, имеющей форму пустотелого цилиндра; на фиг. 14 - иллюстрация действующих сил внутри жидкости на внутреннюю поверхность вращающегося совместно с жидкостью пустотелого цилиндра; на фиг. 15 - иллюстрация действующих сил внутри вращающейся жидкости, имеющей форму пустотелого цилиндра; на фиг. 16 - полый цилиндр с отделяемым от него элементом; на фиг. 17 - иллюстрация действующих сил внутри выделенного элемента полого цилиндра; на фиг. 18 - иллюстрация действующих сил внутри выделенного элемента сплошного цилиндра; на фиг. 19 - иллюстрация действующих сил внутри выделенного элемента сплошного цилиндра; на фиг. 20 - измеритель скорости; на фиг. 21- измеритель скорости с измененным расположением грузов; на фиг. 22 - ротор с круговым сечением на двух подшипниках с двумя неуравновешенными массами; на фиг. 23 - ротор с круговым сечением на двух подшипниках, имеющий ступенчатую наружную поверхность; на фиг. 24 - схема возникновения низкочастотной вибрации; на фиг. 25 - иллюстрация действующих сил внутри ротора в состоянии невесомости; на фиг. 26 - установка для определения изменения массы ротационного устройства и радиальных сил, передаваемых шейками ротационного устройства на подшипники.
В способе определения изменения массы Δm ротационного устройства 1 в зависимости от изменения его частоты вращения n и радиальных сил R, передаваемых шейками 2 ротационного устройства 1 на подшипники 3, в разных диаметральных продольных плоскостях 4 ротационного устройства 1 в зависимости от угла его поворота ϕ вокруг оси 5 при соответствующей частоте его вращения n (фиг. 1, 2), включающем размещение ротационного устройства 1 по меньшей мере на одной грузоприемной платформе 6 по меньшей мере одного устройства для измерения массы 7, содержащего массоизмерительный преобразователь 8, подключенный к измерительному блоку 9, а также блок управления 10 и блок автоматической коррекции 11, при этом установка для реализации способа размещена в вакуумной камере, размещенное в подшипниках 3 ротационное устройство 1 установлено на грузоприемной платформе 6 устройства для измерения массы 7 с возможностью его вращения с помощью привода 12, вал 13 которого связан с одним из концов 14 ротационного устройства с помощью соединительного устройства 15, обеспечивающего при измерении массы ротационного устройства 1 в процессе изменения режимов его вращения необходимую свободу перемещения совместно с грузоприемной платформой 6 и разобщение ротационного устройства 1 от привода 12 при измерении массы ротационного устройства 1 при соответствующей частоте его вращения, измеряемой тахометром-частотомером 16, соединенным с ротационным устройством 1, каждый из подшипников 3 ротационного устройства 1 размещен внутри цилиндрической обоймы 17, снабженной двумя датчиками 18, 19, включенными в цепь измерительного блока 9 и расположенными друг против друга симметрично относительно оси 5 ротационного устройства 1 между наружной поверхностью 20 подшипника 3 и внутренней поверхностью 21 обоймы 17 в диаметральной продольной плоскости 22 ротационного устройства 1, являющейся плоскостью симметрии указанных датчиков 18, 19, при этом каждый из подшипников 3 размещен в обойме 17 с возможностью свободного перемещения в направлении, совпадающем с диаметральной осью симметрии 23 ротационного устройства, лежащей в плоскости симметрии 22 датчиков 18, 19, в ту или иную сторону, обойма 17 каждого подшипника 3 выполнена двойной с возможностью поворота ее внутренней части 24 совместно с подшипником 3 и датчиками 18, 19 вокруг оси 5 ротационного устройства 1 относительно наружной части 25 ее в каждую из двух сторон на угол (±ψ) не менее 90o относительно диаметральной продольной плоскости отсчета ротационного устройства 1 для измерения радиальных сил R в разных диаметральных продольных плоскостях ротационного устройства 1, снабженного отметчиками 26 угла его поворота с выводом сигнала на регистрирующее устройство 27, для определения изменения массы Δm ротационного устройства 1 в зависимости от изменения частоты его вращения n вначале устройством для измерения массы 7 измеряют массу m ротационного устройства 1 в неподвижном состоянии, после приведения ротационного устройства 1 во вращение путем регулирования частоты его вращения n на каждом из режимов измеряют максимальное mмакс и минимальное mмин значения масс ротационного устройства 1, регистрируемые измерительным блоком 9 за период одного оборота его вокруг своей оси 5, изменение массы Δm на каждом режиме определяют как разность между значением массы ротационного устройства 1, измеренной в неподвижном состоянии, и значением полусуммы максимальной mмакс и минимальной mмин масс ротационного устройства 1 на соответствующем режиме его вращения, на основании полученных результатов определяют режимы измерения радиальных сил, передаваемых шейками 2 ротационного устройства 1 на подшипники 3, а радиальные силы R, передаваемые шейками 2 ротационного устройства 1 на подшипники 3, в разных диаметральных продольных плоскостях ротационного устройства 1 в зависимости от угла поворота ротационного устройства 1 вокруг своей оси 5 при соответствующей частоте его вращения n измеряют путем регулирования угла поворота (±ψ) внутренней части 24 обоймы 17 совместно с подшипником 3 и двумя датчиками 18, 19, расположенными друг против друга симметрично относительно оси 5 ротационного устройства 1, и частоты вращения n ротационного устройства 1.
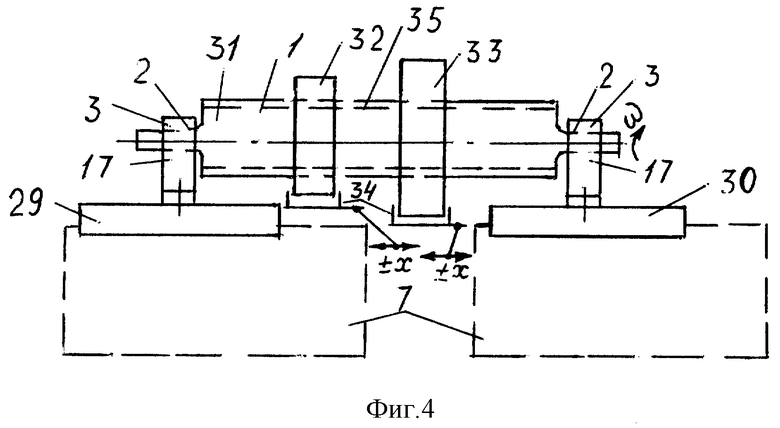
При этом он может заключаться в том, что в качестве привода 12 для вращения ротационного устройства 1 используют электродвигатель с плавным регулированием его частоты вращения n (фиг. 1); что в качестве датчиков 18, 19, которыми снабжены цилиндрические обоймы 17 подшипников 3, используют датчики контактного давления (фиг. 2); что в качестве диаметральной продольной плоскости отсчета ротационного устройства 1 выбирают горизонтальную плоскость 28 (фиг. 2); что измерение массы ротационного устройства 1 на соответствующем режиме его вращения осуществляют одновременно двумя устройствами для измерения массы 7, на грузоприемные платформы 29, 30 которых двумя шейками 2 с помощью подшипников 3, размещенных в обоймах 17, установлено ротационное устройство 1 с обеспечением соосности подшипников 3 в процессе регулирования частоты вращения ротационного устройства 1 и выполнения измерений, причем массу m ротационного устройства 1 в неподвижном состоянии и на соответствующем режиме его вращения определяют как сумму значений масс Σmi , измеренных одновременно двумя устройствами для измерения массы 7 (фиг. 3); что измерение массы m ротационного устройства 1 на соответствующем режиме его вращения выполняют в зависимости от угла поворота ϕ ротационного устройства 1 с регистрацией последнего с помощью отметчиков угла поворота 26 (фиг. 1); что соответствующий режим вращения ротационного устройства 1 осуществляют совместным регулированием распределения масс mi ротационного устройства 1 в направлении оси 5 последнего, при этом ротационное устройство 1 выполнено составным из элементов 31, 32, 33, собранных с возможностью их осевого перемещения (± x) друг относительно друга в ту или иную сторону с помощью устройства 34 для перемещения элементов 31, 32, 33 ротационного устройства 1 в осевом направлении и последующего их удержания от самопроизвольного перемещения при выполнении измерений на соответствующем режиме вращения (фиг. 4); что элементы 31, 32, 33 ротационного устройства 1 соединены с помощью шлицевого соединения 35 (фиг. 4).
Способ определения изменения массы ротационного устройства в зависимости от изменения его частоты вращения и радиальных сил, передаваемых шейками ротационного устройства на подшипники, в разных диаметральных продольных плоскостях ротационного устройства в зависимости от угла его поворота вокруг оси при соответствующей частоте его вращения (фиг. 1, 2) основан на открытом автором в 1997 году Всемирном законе тяготения - Фундаментальном законе мироздания, включающем в себя три основные закона вращающегося тела. Всемирный закон тяготения - Фундаментальный закон мироздания гласит: " 1. Абсолютное движение всякого тела есть движение вращения. Абсолютного прямолинейного движения тел в природе не существует; такое движение может быть только при бесконечно большой скорости тела, чего достичь невозможно. Вращение тела в состоянии его невесомости при критическом значении окружной скорости его центра массы на соответствующем радиусе вращения при отсутствии внешних воздействий на него может происходить сколь угодно долго.
2. Всякое тело, свободно вращающееся вокруг оси на соответствующем удалении его центра массы от последней, при изменении окружной скорости под воздействием внешней силы изменяет радиус своего вращения на величину, соответствующую величине изменения окружной скорости центра массы тела, а именно, при увеличении окружной скорости тело переходит на увеличенный радиус своего вращения, а при уменьшении окружной скорости - на уменьшенный радиус своего вращения. При этом, если тело при вращении каким-то образом удерживается от возможного перемещения в направлении к оси его вращения или в направлении от вышеуказанной оси, то при изменении окружной скорости его центра массы под воздействием внешней силы в теле возникают напряжения растяжения или сжатия, значение которых соответствует величине увеличения или уменьшения окружной скорости центра массы тела, а направление действия растягивающих или сжимающих усилий определяется местом удержания тела от вышеуказанных перемещений, которое может располагаться на стороне внутренней траектории, описываемой при вращении телом, или на стороне его внешней траектории вращения. Так, при увеличении окружной скорости центра массы тела выше ее критического значения для данного радиуса вращения и расположении места удержания тела от перемещения на стороне его внутренней траектории в теле возникают напряжения растяжения, а при расположении места удержания тела на стороне его внешней траектории в указанном случае в теле возникают напряжения сжатия, и, наоборот, при уменьшении окружной скорости центра массы тела ниже ее критического значения для данного радиуса вращения и расположении места удержания тела от перемещения на стороне его внутренней траектории в теле возникают напряжения сжатия, а при расположении места удержания тела на стороне его внешней траектории в последнем случае в теле возникают напряжения растяжения.
3. Свободное круговое вращение всякого тела вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, при одновременном вращении тела и вокруг собственной оси, проходящей через его центр массы, и отсутствии внешних воздействий на него возможно только в случае, когда тело имеет форму шара и его центр массы совпадает с центром шара; в иных случаях свободного вращения всякого тела вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, при одновременном вращении тела и вокруг собственной оси, проходящей через его центр массы, и отсутствии внешних воздействий на него в процессе вращения тела вокруг собственной оси происходит смещение центра массы тела, а вместе с ним и оси его вращения относительно системы координат, связанной с телом, приводящее к движению тела по петлеобразной орбите".
Всемирный закон тяготении - Фундаментальный закон мироздания сформулирован автором на основе известных научных данных, личных наблюдений автора, ранее открытого им в 1994 г. закона Ерченко о свободно вращающемся вихревом потоке среды с неоднородным полем плотностей и с разной молекулярной массой компонентов [1] и выполненных автором опытных исследований.
Указанный закон един как для макромира, так и для микромира.
Для реализации вышеуказанного способа определения изменения массы ротационного устройства в зависимости от изменения его частоты вращения и радиальных сил, передаваемых шейками ротационного устройства на подшипники, в разных диаметральных продольных плоскостях ротационного устройства в зависимости от угла его поворота вокруг оси при соответствующей частоте его вращения, включающего размещение ротационного устройства 1 по меньшей мере на одной грузоприемной платформе 6 по меньшей мере одного устройства для измерения массы 7, содержащего массоизмерительный преобразователь 8, подключенный к измерительному блоку 9, а также блок управления 10 и блок автоматической коррекции 11, установка (фиг. 1, 2) размещается в вакуумной камере, а размещенное в подшипниках 3 ротационное устройство 1 устанавливается на грузоприемной платформе 6 устройства для измерения массы 7 с возможностью его вращения с помощью привода 12.
При этом вал 13 привода 12 связывается с одним из концов 14 ротационного устройства 1 с помощью соединительного устройства 15, обеспечивающего при измерении массы ротационного устройства 1 в процессе изменения режимов его вращения необходимую свободу перемещения совместно с грузоприемной платформой 6 и разобщение ротационного устройства 1 от привода 12 при измерении массы ротационного устройства 1 при соответствующей частоте его вращения, измеряемой тахометром-частотомером 16, соединенным с ротационным устройством 1.
Устройство для измерения массы 7 может содержать другие элементы, обеспечивающие точность измерений, а в установке для реализации способа для измерения массы могут использоваться устройства для измерения массы 7 различного типа, обеспечивающие необходимую точность измерений и грузоподъемность, например, устройство для измерения массы, приведенное в источнике [2] .
В качестве соединительного устройства 15 может быть использован карданный вал. Соединительное устройство 15 для обеспечения разобщения ротационного устройства 1 от привода 12 в процессе выполнения измерений снабжается разъединяющим устройством 36 (фиг. 1), например пневматической муфтой, обеспечивающим разобщение ротационного устройства 1 от привода 12 при достижении устройством 1 соответствующей частоты вращения, после чего производится измерение массы ротационного устройства 1. Установка разъединяющего устройства 36 направлена на повышение точности измерения массы ротационного устройства 1 и поэтому необходимость установки устройства 36 может быть определена на основании опытных исследований путем сравнения получаемых результатов.
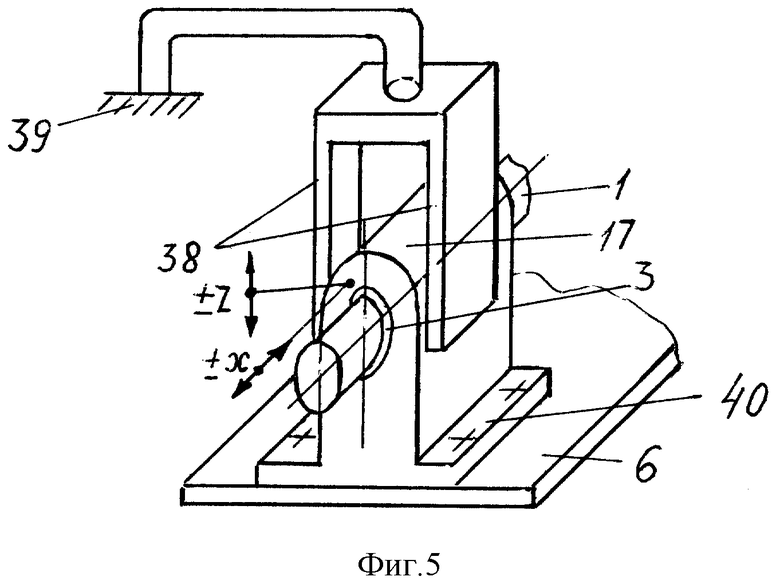
С целью предотвращения перемещения ротационного устройства 1 на грузоприемной платформе 6 при его вращении и выполнении измерений массы устройства 1 наружная часть 25 обоймы 17 снабжается лапами 37 (фиг. 1, 2), которыми последняя 17 соединяется с грузоприемной платформой 6 посредством, например, шпилек с гайками или иным путем (фиг. 1, 2). Соединение лап 37 с грузоприемной платформой 6 может выполняться другим способом. Кроме того, установка для реализации рассматриваемого способа может снабжаться ограничительным устройством 38, установленным на индивидуальном фундаменте 39, т.е. вне связи с устройством для измерения массы 7, которое не позволяет ротационному устройству 1 перемещаться в своем поперечном направлении относительно грузоприемной платформы 6 при вращении в процессе выполнения измерений, обеспечивая при этом свободное вертикальное и по меньшей мере незначительное продольное перемещение устройства 1 совместно с грузоприемной платформой 6.
В качестве указанного ограничительного устройства 38 могут использоваться плоские односторонние параллели 38, которые устанавливаются по крайней мере в районе подшипников 3 ротационного устройства 1 (фиг. 5) и которым передаются поперечные усилия, возникающие из-за неуравновешенности последнего 1 при его вращении. При этом обеспечиваются условия минимальных потерь энергии на трение при перемещении ротационного устройства 1 внутри параллелей 38 при измерении его массы. Свобода некоторого продольного перемещения ротационного устройства 1 необходима для обеспечения свободы при его деформации под действием сил тяжести и неуравновешенности.
Для измерения радиальных сил R, передаваемых шейками 2 ротационного устройства 1 на подшипники 3, каждый из последних размещается внутри цилиндрической обоймы 17, снабженной двумя датчиками 18, 19, включенными в цепь измерительного блока 9 и расположенными друг против друга симметрично относительно оси 5 ротационного устройства 1 между наружной поверхностью 20 подшипника 3 и внутренней поверхностью 21 обоймы 17 в диаметральной продольной плоскости 22 ротационного устройства 1, являющейся плоскостью симметрии указанных датчиков 18, 19. При этом каждый из подшипников 3 размещается в обойме 17 с возможностью свободного перемещения в направлении, совпадающем с диаметральной осью симметрии 23 ротационного устройства 1, лежащей в плоскости симметрии 22 датчиков 18, 19, в ту или иную сторону (фиг. 2). Указанное достигается выполнением с наружной стороны подшипника 3 двух симметрично относительно оси последнего расположенных и параллельных плоскости симметрии 22 датчиков 18, 19 лысок 40 (фиг. 2), с которыми сопрягается внутренняя поверхность 21 обоймы 17.
Для обеспечения возможности выполнения измерений вышеуказанных радиальных сил R в разных диаметральных продольных плоскостях ротационного устройства 1 обойма 17 каждого подшипника 3 выполняется двойной с возможностью поворота ее внутренней части 24 совместно с подшипником 3 и датчиками 18,19 вокруг оси 5 ротационного устройства 1 относительно наружной части 25 ее в каждую из двух сторон на угол (±ψ) не менее 90o относительно диаметральной продольной плоскости отсчета ротационного устройства 1 (фиг. 2). При этом ротационное устройство 1 снабжается отметчиками 26 угла его поворота с выводом сигнала на регистрирующее устройство 27 (фиг. 1).
Определение изменения массы Δm ротационного устройства 1 в зависимости от изменения его частоты вращения n выполняется в следующей последовательности. Вначале с помощью устройства для измерения массы 7 измеряется масса m ротационного устройства 1 в неподвижном состоянии, включающая в себя также массу подшипников 3, в которых устанавливается ротационное устройство 1, массу обойм 17 и массу других элементов, устанавливаемых совместно с ротационным устройством 1 на грузоприемную платформу 6 устройства для измерения массы 7 и обеспечивающих при этом реализацию вышеуказанного способа. В дальнейшем под этой суммарной массой m будем понимать массу ротационного устройства 1.
Затем после приведения ротационного устройства 1 во вращение путем регулирования частоты его вращения n на каждом из режимов измеряются максимальное mмах и минимальное mмин значения масс ротационного устройства 1, которые регистрируются измерительным блоком 9 за период одного оборота его вокруг своей оси 5. Количество режимов с соответствующей частотой вращения n ротационного устройства 1, устанавливаемых путем регулирования частоты вращения ротационного устройства 1, может определяться как расчетным путем, так и на основании предварительных опытных исследований на установке для реализации способа по определению изменения массы Δm ротационного устройства 1 в зависимости от изменения его частоты вращения n во всем диапазоне изменения последней n.
Изменение массы Δm на каждом режиме определяется как разность между значением массы m ротационного устройства 1, измеренной в неподвижном состоянии, и значением полусуммы максимальной mмакс и минимальной mмин масс ротационного устройства 1 на соответствующем режиме его вращения. Из последнего видно, что неизменные массы подшипников 3, обойм 17 и других элементов, увеличивающие измеряемую массу ротационного устройства 1 как в неподвижном состоянии, так и при его вращении, на конечный результат фактически никакого влияния не оказывают.
По завершении вышеуказанных исследований устройство для измерения массы 7 может выводиться из работы с помощью стопорного устройства 41 (фиг. 1), для чего с помощью последнего грузоприемная платформа 6 с установленным на ней ротационным устройством 1 фиксируется в определенном положении, и в дальнейшем благодаря этому исключаются какие-либо перемещения платформы 6 при выполнении последующего этапа исследований. Установка стопорного устройства зависит, прежде всего, от масс ротационных устройств. Стопорные устройства просты по конструкции и разнообразны. В качестве одного из вариантов стопорного устройства может быть использование для указанной цели четырех домкратов 41 устанавливаемых по углам грузоприемной платформы 6 (фиг. 1).
Рассмотрим далее сущность физического явления, заключающегося в изменении массы ротационного устройства 1 в зависимости от изменения его частоты вращения n, и покажем как вышесказанное согласуется с физической природой вибрации оборотной частоты, низкочастотной и высокочастотной вибрации ротационного устройства 1 (фиг. 1). При этом следует подчеркнуть, что законы Ерченко о свободно вращающемся вихревом потоке среды с неоднородным полем плотностей и с разной молекулярной массой компонентов и Всемирный закон тяготения - Фундаментальный закон мироздания, на основе последнего из них сделано настоящее изобретение, являются взаимосвязанными законами. Фактически первый закон Ерченко вытекает из Всемирного закона тяготения - Фундаментального закона мироздания, однако без открытия первого закона Ерченко открытие второго закона вряд ли когда-либо состоялось. Как будет показано ниже, сделать это абсолютно невозможно. Именно поэтому Всемирный закон тяготения - Фундаментальный закон мироздания в течение столетий так и оставался неизвестным для человечества.
Отсюда для раскрытия физической сущности Всемирного закона тяготения - Фундаментального закона мироздания рассмотрим первоначально физическую сущность закона Ерченко, который гласит: "В свободно вращающемся вихревом потоке среды (газа, жидкости, их смесей, диспергированной, двухфазной, пылегазовой и другой сред) с неоднородным полем плотностей и с разной молекулярной массой компонентов в процессе затухания вращательного движения потока за сечением по его длине, в котором максимальное значение окружной скорости достигает критического значения, обеспечивающего еще вращение наиболее тяжелых частиц среды в периферийной зоне потока, возникает процесс непрерывного замещения менее тяжелых частиц среды тяжелыми в направлении к оси вращения потока, продолжающийся до сечения, в котором среда во вращающемся потоке располагается кольцевыми слоями в порядке возрастания ее плотности в каждом последующем из них в направлении к оси вращения вихревого потока.
При максимальном значении окружной скорости, большем критического значения, процесс непрерывного замещения менее тяжелых частиц среды тяжелыми протекает в обратном вышеуказанному направлении, т.е. в направлении к периферии потока".
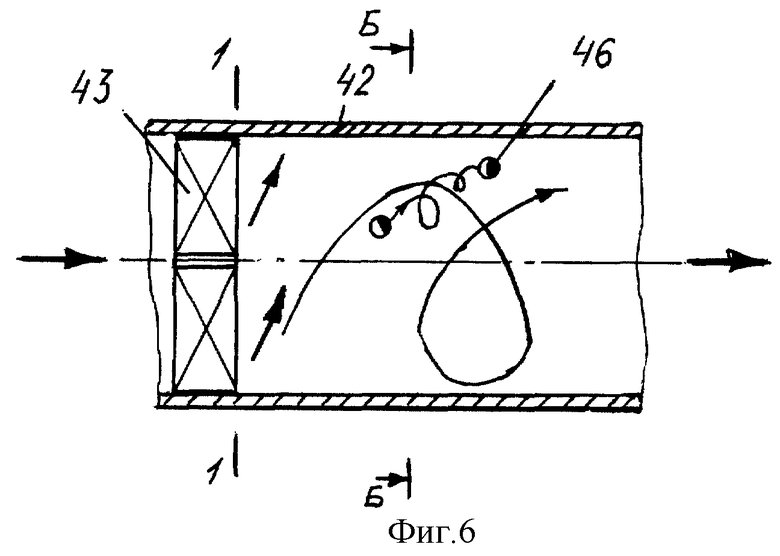
В соответствии с последним рассмотрим физическую картину процесса замещения одних частиц другими, т. е. имеющими разную молекулярную массу, во вращающемся вихревом потоке газа в вихревой трубе 42 (фиг. 6), на входе в которую установлено закручивающее устройство (лопаточный завихритель) 43. Среда имеет одинаковую температуру во всех точках объема потока. Максимальное значение окружной скорости Wмакс закрученного потока среды в выходном сечении 1-1 (фиг. 6) завихрителя потока 43 может не превышать критического значения Wкр, при котором еще обеспечивается вращение наиболее тяжелых частиц среды 44 (наибольшей молекулярной массы) в периферийной зоне потока, а также Wмакс может превышать вышеуказанное критическое значение окружной скорости Wкр. В зависимости от вышеуказанного максимального значения окружной скорости вихревого потока на выходе из завихрителя потока 43 процесс непрерывного замещения менее тяжелых частиц 45 среды тяжелыми 44 при затухании вращательного движения потока происходит в направлении к оси вращения потока или в направлении от вышеуказанной оси, т.е. к периферии потока. В последнем случае процесс продолжается до тех пор, пока максимальное значение окружной скорости Wмакс в каком-то сечении потока не достигнет его критического значения Wкр, при котором еще обеспечивается вращение наиболее тяжелых частиц среды в периферийной зоне потока (фиг.7, 8).
При дальнейшем снижении максимального значения окружной скорости W'макс(W'макс < Wкр) в сечениях потока в направлении его движения направление замещения менее тяжелых частиц среды тяжелыми изменяется на противоположное, т.е. вышеуказанное замещение происходит в направлении к оси вращения потока (фиг. 8).
Движение средней тяжести частиц газа 46, т.е. значение молекулярной массы которых находится в промежутке между значениями молекулярных масс вышеуказанных частиц 44 и 45, происходит по более сложной траектории. Эти частицы 46, совершая вращательные движения в потоке газа и перемещаясь в осевом направлении вихревой трубы 42, одновременно совершают и свои собственные спиралеобразные круговые вращения с уменьшающимся радиусом собственного вращения в направлении к оси вращения потока или к его периферии, что определяется значениями их молекулярных масс, процентным содержанием в потоке газа и местом их расположения в радиальном направлении в последнем, при этом в потоке они находятся во взвешенном состоянии, т.е. вращаются внутри потока (фиг. 6, 7). Объясняется вышеизложенное следующим. За счет полученной дополнительной кинетической энергии от тяжелых частиц 44 средней тяжести частицы 46 газа переходят на увеличенный радиус их вращения в потоке, но движение их в указанном направлении ограничивается приобретенной энергией, которой оказывается недостаточно для дальнейшего перемещения их по спиралеобразной траектории к внутренней поверхности вихревой трубы 42, и вследствие быстрого затухания вращательного движения потока указанные частицы 46 начинают собственное круговое вращение в вихревом потоке в направлении к оси вращения потока, так как процесс приобретения дополнительной кинетической энергии и т.д., что описано выше, продолжается до тех пор, пока в процессе их собственного спиралеобразного вращения радиус спирали окажется равным нулю, что соответствует полному окончанию процесса разделения частиц газа в определенном сечении потока по длине вихревой трубы 42, когда частицы располагаются кольцевыми слоями в порядке возрастания их плотности в каждом последующем слое в направлении к оси вращения вихревого потока (фиг. 6, 7).
На фиг. 6, 7 траектория средней тяжести частицы 46 показана условно, так как частица 46, перемещаясь в потоке по своей траектории, одновременно совершает движение вместе с вращающимся потоком. Траекторию указанной частицы можно представить как бы в выделенном и только вращающемся вместе с потоком газа элементе объема последнего, в котором сама частица 46 совершает свои собственные вращательные движения и при этом перемещается в осевом направлении вихревой трубы 42.
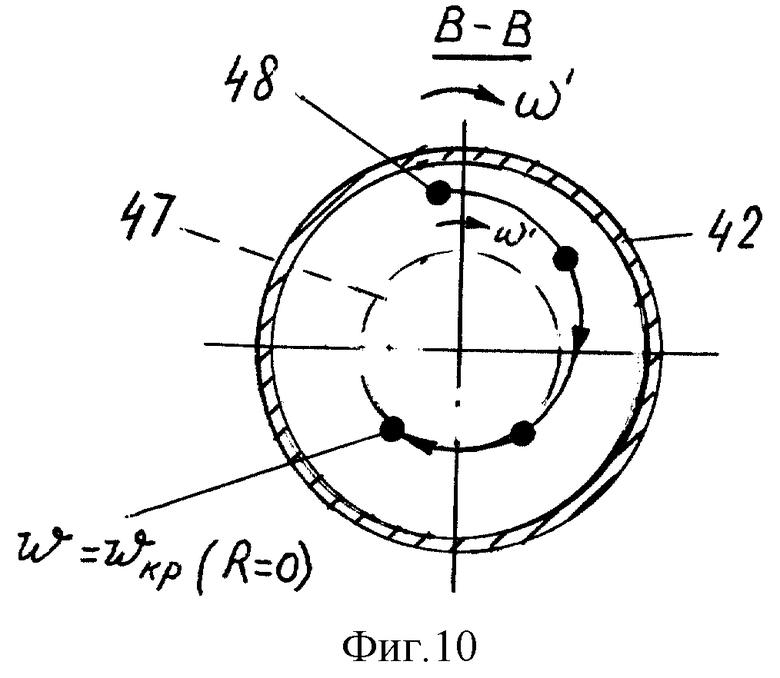
Теперь для лучшего понимания физической сущности Всемирного закона тяготения - Фундаментального закона мироздания рассмотрим следующее. Предположим, что внутри трубы 42, в которой движется свободно вращающийся поток газа (жидкости), соосно ей размещен тонкостенный полый цилиндр 47 с открытыми торцами, которому внешним воздействием обеспечивается постоянная частота вращения. В вышеуказанном вращающемся потоке имеется одна тяжелая частица 48, которая в процессе затухания вращательного движения потока перемещается одновременно вдоль оси трубы 42 (фиг. 9) и в направлении к оси вращения потока (фиг. 10). Размеры частицы бесконечно малы (молекула газа).
Если предположить, что в момент соприкосновения тяжелой частицы 48 с наружной поверхностью полого цилиндра 47 окружные скорости частицы и наружной поверхности последнего оказались равными критическому значению окружной скорости Wкр вращения частицы на данном радиусе вращения, то никакого давления на наружную поверхность полого цилиндра тяжелая частица 48 оказывать не будет. В указанный момент эта частица будет вращаться в состоянии невесомости. При прочих равных условиях, сохраняющихся в дальнейшем, на частицу не будут действовать какие-либо силы, стремящиеся сместить ее в радиальном направлении в ту или иную сторону.
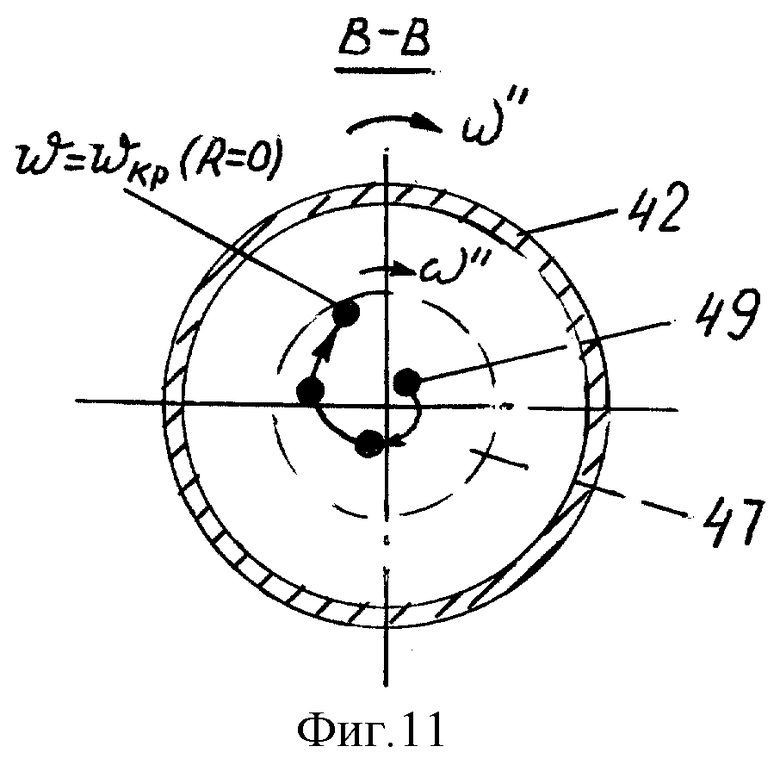
Другая картина происходит в случае, когда тяжелая частица 49, вращаясь с потоком внутри тонкостенного вращающегося полого цилиндра 47, расположенного внутри вихревой трубы 42 соосно последней (фиг. 9), обладая окружной скоростью, превосходящей Wкр на радиусе внутренней поверхности указанного цилиндра 47, перемещаясь от оси вращения к периферии потока, встречается с внутренней поверхностью цилиндра 47. При указанных условиях, стремясь переместиться дальше от оси вращения, частица 49 оказывает давление на внутреннюю поверхность цилиндра.
Если же значение окружной скорости в момент соприкосновения ее с поверхностью цилиндра оказывается одинаковым со значением окружной скорости внутренней поверхности последнего и равным ее критическому значению Wкр на данном радиусе вращения частицы, то последняя в указанный момент оказывается в состоянии невесомости при своем вращении (фиг. 11).
И если предположить, что последнее условие сохраняется неизменным, то в случае, если бы частица только вращалась, а ее осевая скорость равнялась бы нулю, то при абсолютном вакууме внутри вихревой трубы 42 и устранении контакта частицы 49 с поверхностью полого цилиндра, например, за счет его осевого смещения, и при одновременном вращении с той же угловой скоростью в вихревой трубе 42 (фиг. 9), последняя в состоянии невесомости вращалась бы сколь угодно долго.
Вышерассмотренное применимо и для твердого тела, так как законы механики едины как для микромира, так и для макромира. Поэтому рассмотрим ниже следующее. Предположим, что внутри герметичной камеры, которую может выполнять труба 50 большего диаметра, размещен соосно последней меньшего диаметра тонкостенный полый цилиндр 51 (фиг. 12). Указанный цилиндр вращается с постоянной угловой скоростью ω = const, совместно с которым вращается с той же угловой скоростью кольцевой слой однородной изотропной среды (жидкости) 52, примыкающий к его наружной поверхности. Для исключения схода среды с поверхности цилиндра в направлении его оси в ту или иную сторону с каждого торца он ограничен круглой формы контрольной поверхностью 53 с отверстием в центре и выступающей в обе стороны в радиальном направлении за поверхность цилиндра по крайней мере соосной цилиндру 51 (фиг. 12). В указанном случае осевая скорость среды равна нулю.
Допустим, что значение окружной скорости наружной поверхности цилиндра 51 равно критическому значению окружной скорости среды, вращающейся на радиусе r вышеуказанной поверхности цилиндра 51. В трубе 50, выполняющей роль камеры и в которой вращается полый цилиндр 51 совместно со средой 52, поддерживается абсолютный вакуум. Последнее допущение чисто условное (в реальности не осуществимое), но оно необходимо для лучшего понимания дальнейшего. Все частицы среды, как указано выше, вращаются с одной и той же угловой скоростью ω , что является справедливым для твердого тела.
При вышеуказанных условиях значение окружной скорости частиц среды, которые вращаются за пределами наружной поверхности полого цилиндра 51, точнее не контактирующих с ней, оказывается для любого радиуса их вращении в направлении от оси цилиндра 51 меньше ее критического значения на этих же радиусах вращения среды. Поэтому вышеуказанные частицы будут стремиться переместиться в направлении к оси вращения, а так как такое перемещение невозможно, то они будут оказывать давление P на наружную поверхность цилиндра 51, как показано на фиг. 12. Причем в этом случае масса среды во всем кольцевом слое ее вращения оказывается равной массе этой же среды при отсутствии ее вращения, т.е. когда среда находится в состоянии покоя.
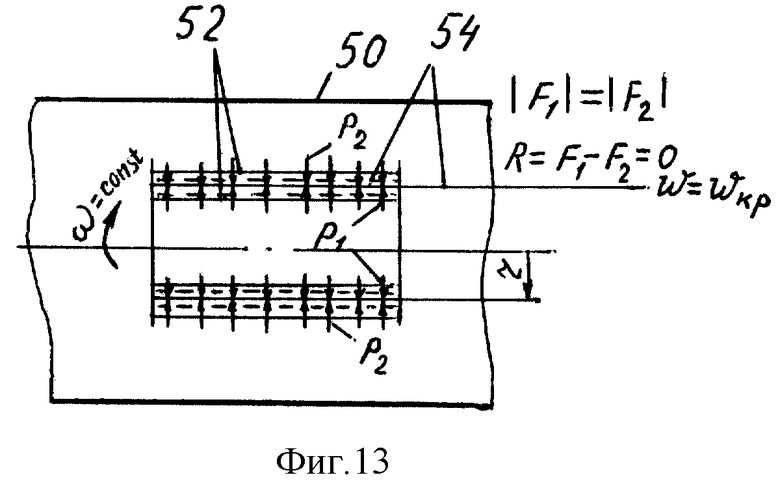
Если допустить, что полый цилиндр каким-то образом при прочих равных условиях может быть внезапно удален из кольцевого слоя среды, например, путем осевого смещения с большой осевой скоростью без захвата среды путем поверхностного трения (идеальный случай), то в этом случае произойдет следующее. Среда сохранит кольцевую форму вращения, однако при этом под действием сил внутри кольцевого слоя среды (фиг. 12) произойдет равномерное по длине слоя последней смещение ее в направлении к оси вращения, т.е. наружный диаметр этого слоя уменьшится. Причем величина смещения в радиальном направлении всех частиц кольцевого слоя вращающейся среды в направлении к оси ее вращения обеспечит переход ее, как единое целое, в невесомое состояние. При этом цилиндрическая поверхность 54, образованная частицами среды 52, вращающимися со значением окружной скорости W, равной критическому ее значению Wкр на радиусе вращения, располагается внутри кольцевого слоя среды 52, а равнодействующая R результирующих сил F1 и F2, действующих на частицы по обе стороны от вышеуказанной поверхности, оказывается равной нулю (фиг. 13).
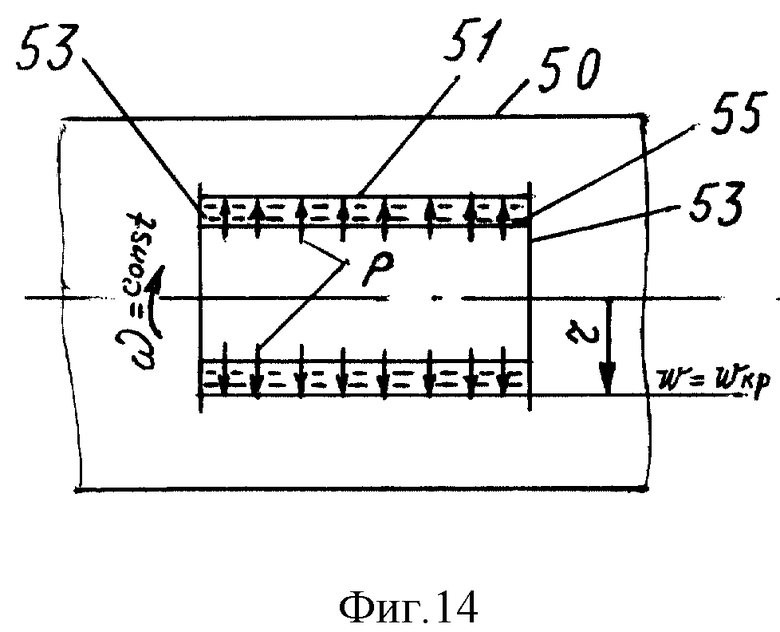
Подобное вышерассмотренному произойдет и в случае вращения среды при прочих равных условиях внутри тонкостенного полого цилиндра 51, окружная скорость внутренней поверхности которого равна критическому значению окружной скорости Wкр среды при вращении ее на радиусе указанной поверхности цилиндра 51. В указанном случае направление действия сил P, возникающих в кольцевом слое среды 55, оказывается противоположным вышерассмотренному при вращении среды снаружи цилиндра 51, а именно, под действием указанных сил частицы среды будут прижиматься к внутренней поверхности вращающегося вместе со средой цилиндра 51 (фиг. 14).
Масса рассматриваемого кольцевого слоя вращающейся среды оказывается равной массе этой же среды при ее неподвижном состоянии.
И если предположить, что каким-то образом вращающийся цилиндр 51 удаляется с места вращения вышеуказанного кольцевого слоя среды, например, осевым смещением полого цилиндра 51 (фиг. 15), то в этом случае среда, вращаясь кольцевым слоем, равномерно относительно оси вращения сместится в сторону, противоположную оси вращения (фиг. 15). При этом цилиндрическая поверхность 56, образованная частицами среды, вращающимися со значением окружной скорости, равной критическому ее значению Wкр на радиусе вращения, располагается внутри кольцевого слоя среды 55, а равнодействующая R результирующих сил F1 и F2, действующих на частицы по обе стороны от вышеуказанной поверхности, оказывается равной нулю (фиг. 15).
И если предположить, что среда для случаев, приведенных на фиг. 13 и фиг. 15, перешла из газообразного или жидкого состояния в твердое состояние, то ее вращение в абсолютном вакууме в камере 50 и при отсутствии внешних воздействий на нее может продолжаться сколь угодно долго. Причем вышеуказанное вращение будет происходить в состоянии невесомости вращающегося полого цилиндра, представляющего из себя твердое тело.
Примером перехода среды из жидкого состояния в твердое может служить фазовый переход воды в лед.
И если при прочих равных условиях (фиг. 13, 15) допустить, что твердое тело, представляющее из себя вращающийся вокруг своей оси полый цилиндр, оказывается симметрично разделенным (разрезанным) на составные элементы, например, путем пересечения его продольными плоскостями, проходящими через ось его вращения, а также по крайней мере и поперечными оси вращения плоскостями для уменьшения размеров образующихся элементов тела, каждый образованный таким путем элемент полого цилиндра получает возможность независимого перемещения в пространстве камеры 50. Однако, при прочий равных условиях, как отмечалось выше, никаких изменений во вращении теперь уже составного твердого тела и месторасположении его в камере 50 не произойдет, т.е. твердое тело, представляющее из себя составной полый цилиндр, будет вращаться как единое целое.
И если допустить, что каким-то образом при прочих равных условиях, т.е. без оказания на него внешнего воздействия, удалось осуществить выделение одного элемента полого цилиндра 51, представляющего из себя твердое тело 57, например, путем осевого смещения основной части 58 полого цилиндра 51 внутри камеры 50 от выделенного элемента 57 (фиг. 16), то вращение его при этом в состоянии невесомости не изменится.
Если же на вышеуказанный выделенный элемент 57, представляющий из себя твердое тело, оказывать внешние воздействия, изменяя при этом значение окружной скорости его центра массы по отношению к критическому значению указанной скорости его на радиусе вращения в невесомом состоянии (фиг. 13, 15), то выделенный элемент 57 будет в соответствии с вышеуказанным переходить на новый радиус своего вращения, на котором значение окружной скорости его центра массы окажется критическим, что соответствует новому невесомому состоянию вращающегося элемента.
Сущность изложенного состоит в том, что равнодействующая R результирующих сил (+ F1 и - F2), действующих на выделенный элемент тела 57 по обе стороны поверхности, описываемой образующей, проходящей через центр массы О' элемента 57, и параллельной оси вращении O элемента 57 тела, отстоящей от его центра массы O' на расстоянии, равном Zц.м., оказывается равной нулю, что и соответствует состоянию невесомости указанного элемента 57 тела (фиг. 17).
Представим теперь, что при прочих равных условиях вышерассмотренное пустотелое цилиндрическое тело оказалось сплошным. В этом случае масса выделенного тем же путем, как указывалось ранее, элемента 59 сплошного цилиндрического тела оказывается не равной нулю, так как равнодействующая R не равняется нулю, а центр массы рассматриваемого элемента сместился к оси его вращения. Абсолютное значение результирующей силы F1 становится больше абсолютного значения результирующей силы F2, т.е.  (фиг.18).
(фиг.18).
При этом необходимо отметить, что масса выделенного элемента сплошного цилиндрического тела при условиях его вращения, рассмотренных выше, оказывается меньшей, чем при его неподвижном состоянии. Аналогично последнему масса вращающегося при этих же условиях сплошного цилиндрического тела будет меньше массы при его неподвижном состоянии.
Рассмотрим далее, как изменяется масса сплошного цилиндрического тела при изменении частоты его вращения в ту или иную сторону от вышеуказанного значения n. При изменении частоты вращения вышеуказанного тела в сторону увеличения от значения n, соответствующего Wкр выделенного элемента 57 пустотелого цилиндрического тела (фиг. 17, 18), абсолютное значение результирующей силы F1, действующей на выделенный элемент 59 сплошного, цилиндрического тела (фиг. 18), возрастает, а абсолютное значение результирующей силы F2, действующей на выделенный элемент 59 указанного тела, уменьшается и в какой-то момент, при росте частоты вращения, оказывается равным нулю.
В соответствии с рассмотренным происходит и изменение массы вращающегося сплошного цилиндрического тела вокруг своей оси, которая с увеличением частоты вращения тела возрастает, достигая при определенном ее значении массы сплошного цилиндрического тела при его неподвижном состоянии. С дальнейшим увеличением частоты вращения тела его масса сохраняется неизменной.
При изменении частоты вращения сплошного цилиндрического тела в сторону уменьшения от значения n, соответствующего Wкр центра массы выделенного элемента 57 пустотелого цилиндрического тела (фиг. 17, 18), абсолютное значение результирующей силы F1, действующей на выделенный элемент 59 сплошного цилиндрического тела (фиг. 18), уменьшается, а абсолютное значение результирующей силы F2, действующей на выделенный элемент указанного тела, увеличивается и в какой-то момент, при уменьшении частоты вращения, становится равным абсолютному значению силы F1 и, таким образом, в указанный момент выделенный элемент сплошного цилиндрического тела становится невесомым.
В этом случае значение окружной скорости центра O" и массы выделенного элемента сплошного цилиндрического тела становится равным критическому W'кр (фиг. 18). Аналогичная картина происходит и с другими выделенными элементами сплошного цилиндрического тела, которые также оказываются вращающимися в состоянии невесомости, а следовательно, и сплошное цилиндрическое тело в целом также оказывается вращающимся в состоянии невесомости.
При дальнейшем снижении частоты вращения тела равенство абсолютных значений результирующих сил F1 и F2 нарушается. При этом сила F2 по абсолютному значению становится большей силы F1 и, следовательно, выделенный элемент сплошного цилиндрического тела становится весомым, т.е. обладающим массой. Процесс увеличения массы элемента сплошного цилиндрического тела с дальнейшим уменьшением частоты вращения продолжается до момента, когда его масса становится равной массе вышеуказанного тела при его неподвижном состоянии.
Таким образом, можно заключить, что при приведении во вращение вышерассмотренного элемента сплошного цилиндрического тела вокруг своей оси и увеличении при этом его частоты вращения масса последнего уменьшается до момента достижения центром О'' массы указанного тела критического значения его окружной скорости W'кр, при которой значение массы тела становится равным нулю (фиг. 19), а при дальнейшем увеличении частоты вращения происходит обратная картина, т.е. масса элемента тела изменяется в сторону ее увеличения от нулевого значения при невесомом элементе до значения массы указанного элемента при его неподвижном состоянии и далее с увеличением частоты вращения n масса элемента сохраняется неизменной.
Следовательно, вышерассмотренное критическое значение окружной скорости W'кр выделенного элемента сплошного цилиндрического тела является одновременно критическим значением для самого тела, поэтому по аналогии с рассмотренным выше с изменением частоты вращения сплошного цилиндрического тела при вращении вокруг своей оси от нуля в сторону увеличения ее масса тела уменьшается, достигая нулевого значения в состоянии невесомости последнего при W'кр, а затем с дальнейшим увеличением частоты вращения масса тела растет до значения при неподвижном состоянии последнего.
Из вышерассмотренного следует, что равнодействующая сила R, являющаяся векторной суммой результирующих сил F1 и F2 (фиг. 18), возникающих в теле при его вращении вокруг оси, отстоящей на соответствующем расстоянии от центра массы тела, является не чем иным, как центробежной силой. Причем знак ее может быть не только положительным, т.е. соответствующим действию центробежной силы в направлении от оси вращения (от центра кривизны траектории) тела, но и отрицательным, соответствующим действию указанной силы в направлении к оси вращения (к центру кривизны траектории) тела. В настоящее время в науке существует единственное мнение, состоящее в том, что центробежная сила всегда направлена от центра кривизны траектории движения тела.
Естественно возникает вопрос, а правомерно ли использование существующей формулы для определения центробежной силы, согласно которой знак ее всегда только положительный.
Расчетная формула для определения центробежной силы тела в зависимости от скорости вращения V (окружной скорости W) и от расстояния r тела от оси вращения имеет вид [3]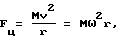
где  , ω - угловая скорость;
, ω - угловая скорость;
n - число оборотов в минуту (частота вращения); M - масса тела.
Покажем, что вышеприведенная формула для определения центробежной силы не отражает реальности и ею пользоваться при расчетах нельзя.
Приведем простейшую схему измерителя скорости (фиг. 20), в корпусе (на фиг. не показан) которого на оси 1 закреплены два стержня 2, составляющие продолжение один другого. По стержням свободно ходят грузы 3, отжимаемые пружинами 4. При вращении оси 1 под влиянием центробежной силы грузы преодолевают сопротивление пружин и перемещаются от центра к периферии. Остальные элементы измерителя скорости на фигуре не показаны.
Допустим, что центробежная сила Fц (фиг. 20), создаваемая телом (грузом) по указанной формуле, определена для фиг. 20, т.е. M = const; ω и r для данного режима вращения тела определены и согласуются с характеристиками измерителя частоты вращения. Изменяя в формуле r на ±Δr , тем самым согласно формуле увеличивается или уменьшается на соответствующую величину ±ΔFц центробежная сила Fц.
Однако при неизменных ω и M при прочих равных условиях положение груза на фиг. 20 не изменится. Никакого изменения не произойдет даже в случае, когда при работе измерителя оказывать на него воздействие для соответствующего перемещения груза на ±Δr, так как после снятия этого воздействия груз вновь придет в первоначальное положение на фиг. 20.
При увеличении ω , а следовательно, соответствующем уменьшении r для сохранения Fц = const согласно расчетной формуле произойдут следующие изменения в работе измерителя (фиг. 20). Увеличение ω согласно фиг. 20 приведет к увеличению r, так как в действительности Fц груза измерителя увеличится, т. е. также видим полное несоответствие расчетной формулы с реальной работой измерителя. Такое же несоответствие имеется и при уменьшении ω и соответствующем увеличении r для сохранения Fц = const согласно расчетной формуле для определения Fц, а именно, при уменьшении ω и прочих равных условиях r уменьшится (фиг. 20), т.е. тело (груз)
сместится в направлении к оси вращения и фактически значение Fц уменьшится в сравнении с F'ц, полученной согласно расчетной формуле для ее определения.
Как отмечалось выше, знак Fц может изменяться, т.е. может быть положительным и отрицательным, так как масса в общем случае при вращении тела (груза) вокруг оси изменяется от максимального значения до нуля при увеличении частоты вращения, а затем увеличивается от нуля до ее максимального значения (фиг. 20, 21).
В рассматриваемой формуле для определения центробежной силы Fц угловая скорость вращения ω и расстояние r тела от оси вращения между собой не взаимосвязаны, т.е. являются независимыми величинами, что противоречит реальной работе измерителя скорости. В действительности указанные величины являются взаимосвязанными, а формула для определения центробежной силы Fц требует корректировки.
Таким образом, из рассмотренного выше становится очевидным, что открытию Всемирного закона тяготения - Фундаментального закона мироздания должно было предшествовать открытие закона Ерченко о свободно вращающемся вихревом потоке среды с неоднородным полем плотностей и с разной молекулярной массой компонентов, так как только он дает возможность проследить в полном объеме физическую картину явлений, происходящих внутри твердого тела при изменении окружной скорости его центра массы на соответствующем радиусе вращения.
Как видно из вышерассмотренного, центробежная сила в общем ее понимании может быть направлена не только от оси вращения, но и в противоположную сторону (к центру кривизны траектории). Ошибочное представление в отношении направления действия центробежной силы только от оси вращения (центра кривизны траектории) возникло в связи с неправильными представлениями этого явления более ранними учеными, которые стали догмой. Но другого быть и не могло, так как внутрь тела не заглянешь, а тем более проследить за процессами, происходящими при вращении тела внутри него, было делом абсолютно не осуществимым. Для этого должен был быть открыт закон Ерченко, о чем сказано выше. В реальности мы постоянно сталкиваемся с подобными явлениями, но не находя ответа, всегда только удивляемся и лишь констатируем сам факт явления.
В научной литературе иногда встречается лишь констатация явления, связанного с движением чаинок при размешивании и затухании процесса вращения чая с чаинками, т. е. без объяснения первого. А существо вопроса в следующем. Тяжелые чаинки, вращающиеся на дне стакана, при определенной их окружной скорости внезапно начинают быстро перемещаться к оси вращения во вращающемся столбе жидкости и по окончании вращения располагаются вокруг центра дна стакана, закончив свое вращение. При перемещении чаинок к оси вращения им приходится преодолевать сопротивление жидкости, т.е. в них возникает отрицательная движущая сила, а именно отрицательная центробежная сила.
Чаинки легкие, находящиеся на поверхности жидкости, с достижением их окружной скоростью критического значения также начинают при вращении жидкости в стакане с чаем перемещение к оси вращения их и с окончанием вращения оказываются сконцентрированными в центре жидкости в стакане. Для задержания чаинок при их движении к оси вращения столба жидкости можно применить кольцо с державкой. После устранения препятствия движению чаинок к оси вращения путем поднятия кольца они продолжают свой путь во вращающемся столбе жидкости к оси вращения.
Таким образом, вышеизложенное раскрывает физическую природу Всемирного закона тяготения - Фундаментального закона мироздания, открытого автором, и тем самым позволяет понять, каким образом на основе указанного закона осуществлен способ определения изменения массы ротационного устройства в зависимости от изменения его частоты вращении и радиальных сил, передаваемых шейками ротационного устройства на подшипники, в разных диаметральных продольных плоскостях ротационного устройства в зависимости от угла его поворота вокруг оси при соответствующей частоте его вращения и оценить перспективы его использования для решения различного рода технических и других задач.
Рассмотрим ниже связь между явлением изменения массы ротационного устройства 1 в процессе изменения его частоты вращения с физической природой вибрации оборотной частоты, низкочастотной и высокочастотной вибрации указанного устройства 1 (фиг. 1).
Приведем простой пример вращения ротора со строго круговым сечением на двух подшипниках (фиг. 22) и неуравновешенными массами m1 и m2 в двух сечениях I-I и II-II, а центры этих масс расположены на разных расстояниях от оси вращения ротора. Для простоты предположим, что центры масс указанных сечений находятся в одной и той же продольной плоскости симметрии ротора. В этом случае с приведением во вращение ротора его масса с увеличением частоты вращения начинает уменьшаться и в момент, когда центробежная сила, создаваемая какой-либо неуравновешенной массой, например m1, превысит силу тяжести облегченного ротора (масса его уменьшается), возникает вибрация оборотной частоты, под которой понимается вибрация с частотой синусоиды, совпадающей с частотой вращения ротора. При этом следует учесть, что знак радиальной силы, создаваемой неуравновешенной массой m1, при вращении ротора может быть как положительным, так и отрицательным, т.е. эта сила может быть направлена как от оси вращения ротора, так и в направлении к ней.
По мере дальнейшего увеличения частоты вращения происходит одновременное изменение как силы тяжести ротора, с которой он давит на масляный слой подшипника, так и центробежной силы, вызываемой неуравновешенной массой m1. И в определенный момент вибрация ротора, вызываемая наличием неуравновешенной массы m1, прекращается. Следует иметь в виду следующее. Когда в процессе изменения частоты вращения ротора значение окружной скорости W центра неуравновешенной массы m1 достигает критического значения Wкр, то в этом случае последняя m1 становится невесомой и всякое ее влияние при прочих равных условиях на вибрацию оборотной частоты ротора исчезает.
Под воздействием центробежной силы от неуравновешенной массы m2 также возникает вибрация ротора, которая может появляться независимо от вибрации, вызываемой наличием неуравновешенной массы m1.
Аналогичная картина вышерассмотренной наблюдается и при расположении неуравновешенной массы m2 при прочих равных условиях в сечении расположения неуравновешенной массы m1, когда их центры масс не лежат на одном радиусе вращения.
Покажем ниже взаимосвязь физического явления, заключающегося в изменении массы ротационного устройства 1 в зависимости от его частоты вращения n, с физической природой низкочастотной и высокочастотной вибрации. В качестве указанного устройства 1 (фиг. 1) рассмотрим ротор со строго круговым сечением, вращающийся на двух подшипниках и имеющий ступенчатую наружную поверхность (фиг. 23).
Одна часть 1 ротора выполнена с диаметром d1, а вторая его часть 2, примыкающая к первой, выполнена с диаметром d2, большим диаметра d1.
С приведением во вращение ротора в процессе увеличения его частоты вращения при определенном значении последней окружная скорость части 1 ротора с меньшим диаметром d1 достигает критического значения Wкр. В этом случае указанная часть 1 ротора оказывается невесомой и с этого момента возможно возникновение низкочастотной вибрации, под которой понимают вибрацию ротационного устройства с частотой, близкой к половине частоты вращения первого.
Низкочастотная вибрация возникает в случае потери устойчивости вращения ротора на масляной пленке подшипника и возникновения при этом самоподдерживающихся колебаний или так называемых автоколебаний. Здесь следует особо подчеркнуть, что момент возникновения низкочастотной вибрации определяется не только достижением при соответствующей частоте вращения состояния невесомости частью 1 ротора с меньшим наружным диаметром d1 в соответствии с фиг. 23, а целым рядом факторов, например, длиной указанной части 1 ротора, габаритами второй его части 2, а соответственно, ее массой, так как последняя под действием сил тяжести будет прижимать шейку невесомой части 1 ротора к масляной пленке подшипника. По мере дальнейшего увеличения частоты вращения ротора состояние невесомости будет распространяться на все большую часть ротора и в итоге, как отмечалось выше, потеря устойчивости вращения ротора на масляной пленке подшипника неминуемо возникает.
Следует также отметить, что реальные роторы во многих случаях имеют первую критическую скорость, примерно равную половинной частоте вращения, что подтверждает то, что именно с возникновением в результате увеличения частоты вращения ротора состояния невесомости только для его части, имеющей меньший наружный диаметр, а точнее, меньшие размеры по внешнему контуру ротора, возникает вибрация последнего.
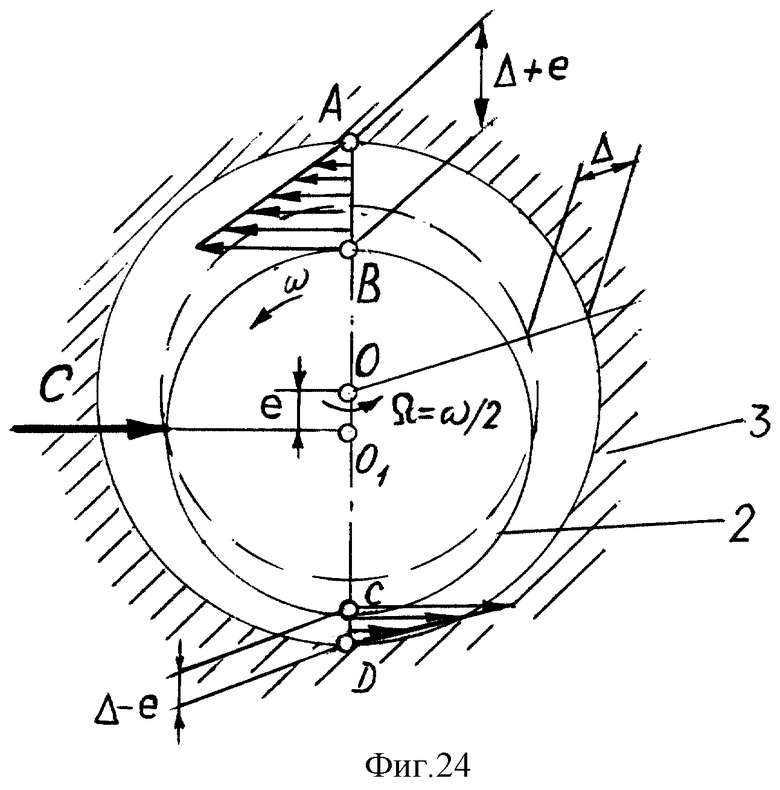
Процесс возникновения автоколебаний в масляном слое подшипника можно понять на простой модели, показанной на фиг. 24. Шейка ротора, на которую действует сила тяжести последнего, вращается в расточке подшипника. Под действием указанной силы шейка оказывается смещенной приближенно вертикально вниз (незначительное горизонтальное смещение вызывается образованием масляного клина) и ее центр O1 не совпадает с центром расточки O, при этом никакой вибрации не происходит.
В процессе увеличения частоты вращения ротора в некоторый момент, отсчитываемый от начала его вращения, окружная скорость части 1 ротора, как указывалось выше, с меньшими габаритами внешнего контура (фиг. 23) достигает критического значения и шейка ротора становится невесомой.
Рассмотрим расходы масла через сечения A-B и C-D до момента появления указанной невесомости части ротора (фиг. 24). Масло, увлекаемое вращающейся шейкой, в точках B и C имеет скорость ωrш , где rш - радиус шейки вала, а в точках A и D - скорость, равную нулю, так как во всех случаях масло прилипает к металлу. В первом приближении можно считать, что скорость масла в зазоре изменяется по линейному закону и поэтому показанные на фиг. 24 треугольные эпюры изображают секундные объемные расходы масла через зазор, ширина которого (в направлении, перпендикулярном чертежу) равна единице. С учетом последнего через сечение A-B входит количество жидкости  , а через сечение C-D выходит количество жидкости, равное
, а через сечение C-D выходит количество жидкости, равное  .
.
Разность объемных расходов масла eωrш должна остаться в зазоре слева от линий AB и CD. Однако масло - жидкость практически несжимаемая, поэтому в рассмотренной области возникает повышенное давление, которое будет стремиться сдвинуть шейку вала вправо с тем, чтобы создать недостающий объем для разности расходов масла.
Таким образом, в процессе увеличения частоты вращения ротора состояние невесомости распространяется в соответствии с первым на большую длину ротора, отсчитываемую со стороны его меньших размеров по внешнему контуру, и в определенный момент, т.е. частоте вращения, создаются условия, позволяющие силе C, возникшей за счет вышеуказанного повышенного давления в рассмотренной области и действующей перпендикулярно смещению шейки вала вниз, сдвинуть шейку вала вправо, а точнее, повернуть ее вокруг точки O с некоторой угловой скоростью Ω , отличной от частоты вращения ω . Но при сдвиге шейки вправо уменьшится правый боковой зазор и появится сила, действующая вертикально вверх, которая будет уменьшать верхний зазор и т.д. [4].
В действительности ротор перемещается не рывками, а непрерывно: вследствие возникновения невесомости при критическом значении окружной скорости Wкр части ротора на стороне его меньших размеров по внешнему контуру при наличии сдвига ротора вниз на величину вектора  величина силы C, приложенной перпендикулярно смещению шейки, становится достаточной для создания прецессии шейки вокруг центра расточки подшипника. Сила C вращается вместе с шейкой, поэтому ее называют циркуляционной силой.
величина силы C, приложенной перпендикулярно смещению шейки, становится достаточной для создания прецессии шейки вокруг центра расточки подшипника. Сила C вращается вместе с шейкой, поэтому ее называют циркуляционной силой.
Определим скорость самоподдерживающейся прецессии, т.е. вибрации. Из фиг. 24 видно, что линейная скорость прецессии равна Ωe , а освобождающийся в единицу времени для количества жидкости eωrш объем для массы eωrш равен Ωe•2•rш. Приравнивая два последних выражения, получаем Ω = ω/2, т.е. масляные циркуляционные силы вызывают прецессию невесомой шейки ротора с частотой, равной половине частоты вращения.
Следует отметить одну из характерных особенностей явления автоколебаний, заключающуюся в том, что для возникновения условий потери устойчивости вращения вала на масляной пленке, т.е. появления низкочастотной вибрации, требуется большее облегчение вала за счет возникновения невесомости части его при соответствующей частоте вращения, чем для возвращения вала в устойчивое состояние. Поэтому для устранения возникшей низкочастотной вибрации требуется дополнительное уменьшение частоты вращения по отношению к частоте, при которой возникла указанная вибрация.
Из вышеприведенного видно, что неуравновешенность ротора (вала) или его деформация никакого отношения к низкочастотной вибрации не имеют.
Рассмотрим далее взаимосвязь физического явления, связанного с изменением массы ротационного устройства в зависимости от изменения его частоты вращения, с физической природой высокочастотной вибрации. Высокочастотной вибрацией называется вибрация с частотой, вдвое превышающей частоту вращения ротора. Так, для турбоагрегата, имеющего частоту вращения 50 с-1, частота вибрации составляет 100 Гц.
Вибрация двойной оборотной частоты возникает по следующей причине. Как уже отмечалось выше, с достижением при соответствующей частоте вращения состояния невесомости частью 1 ступенчатого ротора (фиг. 23) с меньшим наружным диаметром d1 дальнейшее увеличение частоты вращения ротора приводит к распространению состояния невесомости на все большую часть ротора и в какой-то момент ротор становится в целом невесомым.
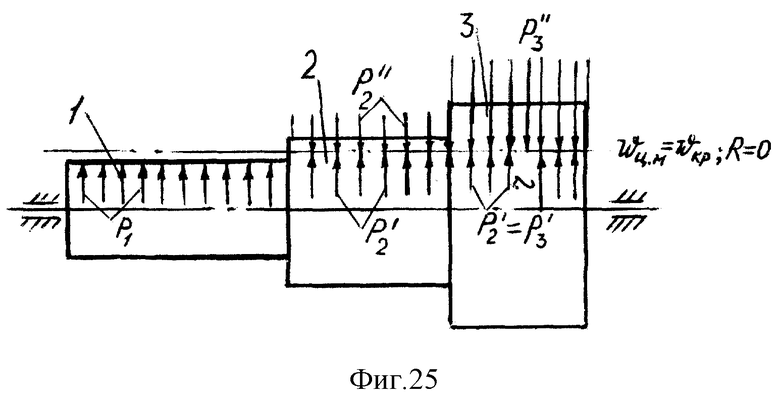
Рассмотрим ротор со строго круговым сечением, вращающийся на двух подшипниках и имеющий трехступенчатую (1, 2 и 3) наружную поверхность (фиг. 25). Размеры ступеней (наружный диаметр и и длина) могут быть произвольными. В момент возникновения невесомого состояния в процессе увеличения частоты вращения ротора равнодействующая R всех действующих внутри ротора сил становится равной нулю (фиг. 25). При этих условиях возникает потеря устойчивости вращения ротора на масляной пленке подшипника и шейки ротора смещаются вверх в вертикальном направлении, т.е. аналогично вышерассмотренному для низкочастотной вибрации, но при смещении при той же частоте вращения n появляется некоторая весомость ротора, что вызывает появление на угле ~90o, отсчитываемого с момента начала смещения шеек ротора вверх, масляного клина. При этом вследствие дальнейшего увеличения массы ротора последний сильнее давит на масляный клин, в результате чего клин начинает вращательное движение в направлении вращения ротора.
К моменту достижения каждой шейкой ротора максимального смещения вверх, что происходит на общем угле поворота в 180o с начала смещения шейки вверх, масса ротора достигает максимального значения и давление в масляном клине также достигает максимума, что приводит к мгновенному, другими словами ударному, смещению каждой шейки ротора и ротора в целом вертикально вниз. Последнее повторяется через каждые 180o угла поворота ротора или два раза за один его оборот.
На основании полученных выше результатов по определению изменения массы Δm ротационного устройства 1 в зависимости от изменения его частоты вращения n определяются режимы измерения радиальных сил, передаваемых шейками ротационного устройства на подшипники (фиг. 1), что позволяет значительно сократить объем исследований, а также установить режимы, требующие подробных исследований.
Выполнение измерений вышеуказанных радиальных сил, передаваемых шейками ротационного устройства на подшипники, достигается путем регулирования угла (±ψ) поворота внутренней части 24 обоймы 17 совместно с подшипником 3 и датчиками 18, 19 вокруг оси 5 ротационного устройства 1 относительно наружной части 25 ее и частоты вращения n устройства 1 (фиг. 1, 2). Благодаря выполнению вышеуказанного поворота внутренней части 24 обоймы 17 относительно наружной части 25 ее на угол ±ψ достигается возможность измерения радиальных сил, передаваемых шейками 2 ротационного устройства 1 на подшипники 3 в разных диаметральных продольных плоскостях последнего.
Причем измерение радиальных сил, передаваемых шейками ротационного устройства на подшипники, при соответствующей частоте вращения в установленной диаметральной плоскости устройства 1 осуществляется в зависимости от угла поворота последнего вокруг своей оси 5, что обеспечивает возможность получения максимально полной информации, необходимой для устранения вибрации, установления условий смазки трущейся пары и в других случаях при проектировании подшипников с целью обеспечения их долговечности и надежности при работе ротационного устройства 1 (фиг. 1). Следует отметить, что измерения радиальных сил могут осуществляться как одновременно для двух подшипников, так и поочередно. При этом поворот внутренней части 24 обоймы 17 относительно наружной части 25 ее может осуществляться для двух подшипников как синхронно, так и независимо.
Наиболее целесообразным приводом 12 для вращения ротационного устройства 1 является электродвигатель с плавным регулированием его частоты вращения n (фиг. 1). При этом не исключается возможность использования в качестве привода других устройств.
В качестве датчиков 18, 19, которыми снабжаются цилиндрические обоймы 17 подшипников 3, могут быть использованы датчики контактного давления (фиг. 2) или другого типа.
При определении изменения радиальных сил R, передаваемых шейками 2 ротационного устройства 1 на подшипники 3, в качестве диаметральной продольной плоскости отсчета ротационного устройства 1 может быть выбрана горизонтальная плоскость 28 (фиг. 2). В общем случае выбор указанной плоскости отсчета может выбираться произвольно.
На грузоприемную платформу 6 (фиг. 1) установки для реализации рассматриваемого технического решения могут устанавливаться для выполнения соответствующих измерений не только ротационные устройства 1 горизонтального исполнения, но могут также устанавливаться указанные устройства вертикального исполнения, например ротор гидротурбины и другие устройства.
Установка ротационного устройства 1 на одной грузоприемной платформе в устройстве для измерения массы 7 не позволяет однозначно установить экспериментальным путем, каким образом в процессе увеличения частоты вращения n ротационного устройства 1 с момента его запуска происходит уменьшение его массы, что является особо важным не только в научном плане, но и для определения границ низкочастотной вибрации при изменении частоты вращения ротационного устройства 1, действующих напряжений растяжения или сжатия в элементах последнего в зависимости от выбора типа ротора, т.е. гибкого или жесткого, а также при решении других технических задач, связанных с проектированием, изготовлением и эксплуатацией ротационных устройств.
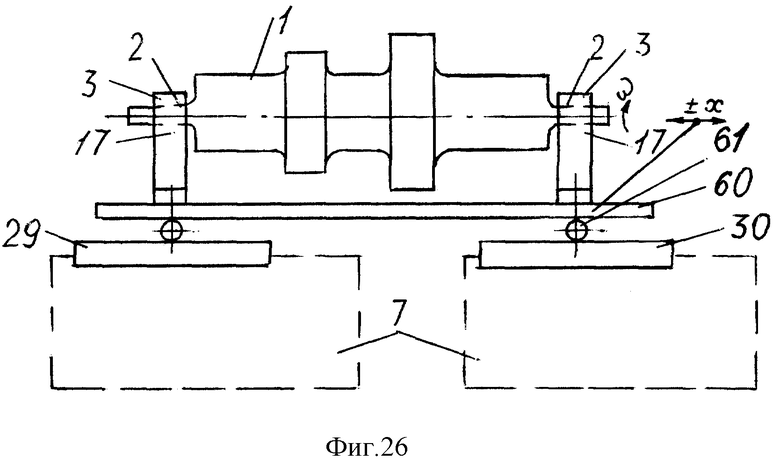
Для решения указанных задач измерение массы ротационного устройства 1 на соответствующем режиме его вращения может осуществляться одновременно двумя устройствами для измерения массы 7, на грузоприемные платформы 29, 30 которых двумя шейками 2 с помощью подшипников 3, размещенных в обоймах 17, устанавливается ротационное устройство 1 (фиг. 3). При этом для исключения перекосов в линии подшипник - ротор - подшипник ротационного устройства 1 за счет разной величины вертикального перемещения грузоприемных платформ 6 ротационное устройство 1 устанавливается на грузоприемные платформы 6 с обеспечением соосности подшипников 3 в процессе регулирования частоты вращения ротационного устройства 1 и выполнения измерений. Последнее может достигаться, например, путем размещения ротационного устройства 1 на собственной платформе 60, которая каждым своим концом на шарнирной опоре 61 устанавливается на соответствующую грузоприемную платформу 29, 30 устройства для определения массы 7 (фиг. 25). Следует отметить, что в указанном случае масса собственной платформы 60 и дополнительных опор 61 входит в общую массу m ротационного устройства 1. Однако на конечный результат такое увеличение общей массы ротационного устройства 1 влияния не оказывает. Массу m ротационного устройства 1 в неподвижном состоянии и на соответствующем режиме его вращения определяют как сумму значений масс Σmi, измеренных одновременно двумя устройствами для измерения массы 7 (фиг. 3), а изменение массы определяется аналогично вышерассмотренному.
Измерение массы ротационного устройства 1 на соответствующем режиме его вращения одновременно двумя устройствами для измерения массы является лучшим способом раскрытия физической природы низкочастотной вибрации.
С целью установления физической природы высокочастотной вибрации, а также для решения других задач измерение массы m ротационного устройства 1 на соответствующем режиме его вращения выполняют в зависимости от угла поворота ϕ ротационного устройства 1 с регистрацией последнего с помощью отметчиков угла поворота 26 (фиг. 1).
Для обеспечения возможности получения максимально полной информации, касающейся физической природы вибрации оборотной частоты, низкочастотной и высокочастотной вибрации, способ определения изменения массы ротационного устройства 1 и радиальных сил, передаваемых шейками 2 ротационного устройства 1 на подшипники 3 (фиг. 1), осуществляется совместным регулированием распределения масс mi ротационного устройства 1 в направлении оси 5 последнего. Для выполнения этого условия ротационное устройство 1 выполняется составным и собирается из отдельных его элементов, например элементов 31, 32, 33? с возможностью их осевого перемещения (±x) друг относительно друга в ту или иную сторону с помощью устройства 34 для перемещения элементов 31, 32, 33 ротационного устройства 1 в осевом направлении и последующего их удержания от самопроизвольного перемещения при выполнении измерений на соответствующем режиме вращения (фиг. 4).
Указанное перемещение элементов 31, 32, 33 может достигаться путем соединения первых с помощью шлицевого соединения 35 (фиг. 4). Для этого могут быть использованы и другие технические решения.
Кроме того, возможность выполнения ротационного устройства 1 составным из элементов, собранных с возможностью их осевого перемещения друг относительно друга в ту или иную сторону при выполнении исследований, позволяет устанавливать условия работы элементов ротационного устройства, что связано с определением их прочностных характеристик, применением новых конструкционных материалов, например керамики. Последнее особенно перспективно в газотурбостроении. Но, как известно, керамика хорошо работает на сжатие, не выдерживая существенно меньших напряжений на разрыв. Поэтому особенно важным является то, что использование рассматриваемого способа определения изменения массы ротационного устройства и радиальных сил, передаваемых шейками ротационного устройства на подшипники, позволяет установить такие условия работы элементов из керамики, при которых указанные растягивающие напряжения оказываются незначительными или вообще отсутствуют. Последнее раскрывает широкие перспективы в использовании керамики для изготовления газотурбинных установок. В процессе исследований может производиться замена одних элементов ротационного устройства другими с отличающимися между собой соответствующими характеристиками.
Из вышерассмотренного вытекает необходимость в корректировке расчетной формулы центробежной силы и расчетов на прочность элементов ротационного устройства, а использование рассматриваемого технического решения позволяет найти пути для решения вышеуказанных задач.
Таким образом, изобретение на основе открытого автором Всемирного закона тяготения - Фундаментального закона мироздания позволяет раскрыть ранее неизвестные в науке физические явления, заключающиеся в изменении массы ротационного устройства в зависимости от изменения его частоты вращения и в уменьшении давления шеек ротационного устройства на подшипники при приведении последнего во вращение, физическую природу вибрации оборотной частоты, низкочастотной и высокочастотной вибрации и на их основе обеспечивает возможность улучшения вибрационных характеристик, создания облегченных и надежных конструкций двигателей и других механизмов с вращающимися элементами, в частности, в паро- и газотурбостроении за счет получения возможности оценивать реальные напряжения, возникающие при их работе, а не завышенные согласно существующим расчетам на прочность вышеуказанных элементов, которые требуют соответствующей корректировки, расширяет возможность использования новых конструкционных материалов и позволяет решать многие другие задачи.













Изобретение может быть использовано для улучшения вибрационных характеристик конструкций с вращающимися элементами в различных отраслях промышленности. Размещенное на грузоприемной платформе для измерения массы ротационное устройство приводят во вращение путем регулирования частоты его вращения. На каждом из режимов измеряют максимальное и минимальное значения масс устройства. Изменение массы на каждом режиме определяют как разность между значением массы устройства, измеренной в неподвижном состоянии, и значением полусуммы масс ротационного устройства на соответствующем режиме его вращения. Радиальные силы, передаваемые шейками устройства на подшипники, в зависимости от угла поворота устройства при соответствующей частоте его вращения измеряют путем регулирования угла поворота внутренней части обоймы с подшипником относительно оси и частоты вращения ротационного устройства. Технический результат - улучшение вибрационных характеристик, создание облегченных и надежных конструкций двигателей и механизмов с вращающимися элементами. 7 з.п.ф-лы, 26 ил.