Изобретение относится к способу, позволяющему имитировать движение планеты для определения ее вращения вокруг собственной оси неравномерной угловой скоростью и поворота ее вокруг собственной оси с неравномерной угловой скоростью и поворота ее петлеобразной орбиты на соответствующие угол и сторону вокруг оси, отстоящей на соответствующем расстоянии от ее центра массы, от оборота к обороту планеты, и может быть использовано при изучении астральной системы, движения планет и других небесных тел, получения новых научных данных о Вселенной, для решения как научных, так и технических задач, стоящих перед космонавтикой, при создании новых типов летательных аппаратов, а также в иных целях.
Изобретение сделано на основе открытого автором Всемирного закона тяготения - Фундаментального закона мироздания, поэтому и не обнаружено аналогов, имеющих назначение - определение вращения планеты, свободно движущейся по петлеобразной орбите, с неравномерной угловой скоростью вокруг собственной оси и поворота ее петлеобразной орбиты на соответствующие угол и сторону вокруг оси, отстоящей на соответствующем расстоянии от ее центра массы, от оборота к обороту планеты вокруг последней в зависимости от величины дробной части соответствующего отношения угловых скоростей вращения планеты, обеспечивающих движение ее по петлеобразной орбите, имитационным путем.
Цель изобретения - разработка способа, позволяющего раскрыть законы строения мироздания и процессы, происходившие и происходящие во Вселенной и астральной системе, путем получения возможности имитировать движение планет с целью определения вращения планеты вокруг собственной оси с неравномерной угловой скоростью и поворота ее петлеобразной орбиты на соответствующие угол и сторону вокруг оси, отстоящей на соответствующем расстоянии от ее центра массы, от оборота к обороту планеты, для решения как научных, так и технических задач, стоящих перед космонавтикой, при создании новых типов летательных аппаратов.
Указанная цель достигается тем, что в имитационном способе определения вращения планеты, свободно движущейся по петлеобразной орбите вокруг собственной оси с неравномерной угловой скоростью и поворота ее петлеобразной орбиты на соответствующие угол и сторону вокруг оси, отстоящей на соответствующем расстоянии от ее центра массы, от оборота к обороту планеты вокруг последней в зависимости от величины дробной части соответствующего отношения угловых скоростей вращения планеты, обеспечивающих движение ее по петлеобразной орбите, вращают с помощью привода основание с телом, имитирующим планету, при этом тело, имитирующее планету, устанавливают на оси, являющейся собственной осью вращения тела, проходящей через его центр массы, внутри контейнера, размещенного внутри канала, выполненного в основании консольного типа или в форме диска, соединяющего приосевую и периферийную зоны основания, при этом канал выполнен с дном или без дна в форме щели, а в первом случае дно располагают в плоскости, перпендикулярной к оси вращения вала, установленного в подшипниках опоры и соединенного жестко с одним концом основания консольного типа или с диском, устанавливаемым соосно валу, внутри канала в продольном его направлении размещают на расстоянии друг от друга две идентичные по своим характеристикам пружины, граничащие, по крайней мере, каждым из концов со своим ползуном, свободно перемещающимся в продольном направлении канала, или при этом каждым смежным концом из них - с соответствующей стенкой контейнера, а в первом случае между внутренними ползунами, установленными между смежными концами пружин, размещают вышеуказанный контейнер с возможностью свободного перемещения в продольном направлении канала с минимальным коэффициентом трения о поверхности контакта с последним, привод соединяют с валом с возможностью плавного регулирования частоты вращения последнего, а тело, имитирующее планету, снабжают отметчиками угла поворота, равномерно распределенными вокруг оси, на которой оно устанавливается в контейнере, один из которых является базовым отметчиком угла поворота тела, имитирующего планету, изменяют силу сжатия указанных выше пружин, минимальное значение которой может равняться нулю с помощью соединительного устройства, связывающего между собой внешние ползуны и позволяющего перемещать их в ту или иную сторону, измеряют частоту вращения вала, по крайней мере, размещенного в вакуумной камере, и регулируют ее до установления равенства длин обеих пружин для достижения критического значения окружной скорости центра массы тела, имитирующего планету, на соответствующем радиусе его вращения, определяемом с помощью измерительного устройства, которое рассчитывают по формуле
Wкр = 2 • π • rц.м. • n,
где Wкр - критическое значение окружной скорости, м/с;
rц.м.. - радиус вращения центра массы тела, м;
n - частота вращения вала, с-1,
после этого тело, имитирующее планету, приводят во вращение вокруг оси, на которой оно установлено, соединенным с указанной осью приводом, регулируют частоту вращения вокруг собственной оси, затем отсоединяют ось от привода и записывают траекторию движения тела, представляющую собой петлеобразную орбиту движущейся планеты, с помощью регистрирующего устройства и одновременно производят регистрацию времени прохождения каждым из отметчиков угла поворота тела, имитирующего планету, вокруг собственной оси базовой отметки, определяют время, затрачиваемое на поворот тела, имитирующего планету, вокруг собственной оси на угол, определяемый каждой смежной парой отметчиков угла поворота и отсчитываемый для каждой из смежных пар вышеуказанных отметчиков угла поворота от базовой отметки, рассчитывают угловую скорость вращения тела, имитирующего планету, на каждом из вышеуказанных углов поворота, определяемых смежными парами отметчиков угла поворота тела, имитирующего планету, и определяют среднее значение угловой скорости вращения тела, имитирующего планету, вокруг собственной оси, а наличие разницы в значениях между вышеуказанными первыми и последней угловыми скоростями вращения тела, имитирующего планету, определяет вращение последнего с неравномерной угловой скоростью в пределах одного оборота вокруг собственной оси вращения при сохранении постоянной частоты вращения вокруг последней, затем ось, на которой устанавливается тело, имитирующее планету, соединяют с приводом и регулируют частоту его вращения вокруг собственной оси для достижения соответствующего значения отношения угловой скорости вращения тела, имитирующего планету, вокруг собственной оси вращения, пересекающей его центр массы, к угловой скорости вращения тела, имитирующего планету, по петлеобразной орбите, равного целому числу, после чего записывают траекторию его движения по петлеобразной орбите, фиксируя при этом границы вышеуказанной траектории в пределах одного оборота тела, имитирующего планету, по петлеобразной орбите с помощью базового отметчика угла поворота, а затем при прочих равных условиях последовательно изменяют вышеуказанное отношение угловых скоростей на величину, не превышающую 0,5 в сторону ее уменьшения или увеличения за счет изменения угловой скорости вращения тела, имитирующего планету, вокруг собственной оси вращения и после каждого такого изменения угловой скорости тела, имитирующего планету, вокруг собственной оси вращения записывают траекторию его движения по петлеобразной орбите, фиксируя границы траектории движения тела за один его оборот по петлеобразной орбите вышеуказанным путем, т.е. с помощью базового отметчика, угла поворота, при этом каждое изменение дробной части вышеуказанного отношения угловых скоростей вращения тела, имитирующего планету, при прочих равных условиях за счет уменьшения или увеличения целого значения вышеуказанного отношения угловых скоростей движения тела по петлеобразной орбите на величину в пределах от значения больше нуля, но меньше 0,5 приводит к возникновению вращения петлеобразной орбиты движения тела, имитирующего планету, от оборота к обороту его вокруг оси вышеуказанной орбиты соответственно в сторону, совпадающую с направлением движения последнего по петлеобразной орбите, или в сторону, противоположную вышеуказанному направлению движения тела по орбите, а при значении дробной части вышеуказанного отношения угловых скоростей движения планеты по петлеобразной орбите, равной пять десятых, через каждый оборот планеты по петлеобразной орбите происходит чередование пространственного расположения последней относительно системы координат, одна из осей которой совпадает с осью петлеобразной орбиты, а при одинаковых значениях угловых скоростей, обеспечивающих движение планеты по петлеобразной орбите, последняя приобретает форму, образующуюся при сопряжении двух полуэллипсов, один из которых охватывает снаружи одну половину круговой орбиты вращения тела в состоянии невесомости при отсутствии его вращения вокруг собственной оси, а второй полуэллипс располагается внутри другой половины вышеуказанной круговой орбиты.
Отсутствие аналогов заявляемому техническому решению позволяет сделать вывод о том, что заявляемое техническое решение соответствует критерию "новизна".
В известных науке и технике решениях нами не обнаружены совокупности признаков заявляемого решения, проявляющих аналогичные свойства и позволяющих достичь указанный в цели изобретения результат, следовательно, решение соответствует критерию изобретения "существенные отличия".
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена установка для имитации движения планет по петлеобразным орбитам; на фиг. 2 - установка для имитации движения планет по петлеобразным орбитам; на фиг. 3 - петлеобразная орбита свободно вращающегося тела; на фиг. 4 - сечение по А-А на фиг. 1; на фиг. 5 - иллюстрация возникновения вращения петлеобразной орбиты планеты при уменьшении целого значения отношения угловых скоростей ее движения  в пределах от значения больше 0, но меньше 0,5; фиг. 6 - иллюстрация возникновения вращения петлеобразной орбиты планеты при увеличении целого значения отношения угловых скоростей ее движения
в пределах от значения больше 0, но меньше 0,5; фиг. 6 - иллюстрация возникновения вращения петлеобразной орбиты планеты при увеличении целого значения отношения угловых скоростей ее движения  в пределах от значения больше 0, но меньше 0,5; на фиг. 7 - иллюстрация расположений петлеобразной орбиты движения планеты от оборота к обороту последней вдоль нее при значении дробной части отношения угловых скоростей движения планеты по петлеобразной орбите, равной пять десятых; на фиг. 8 - петлеобразная орбита свободно вращающейся планеты при значении отношения угловых скоростей ее движения
в пределах от значения больше 0, но меньше 0,5; на фиг. 7 - иллюстрация расположений петлеобразной орбиты движения планеты от оборота к обороту последней вдоль нее при значении дробной части отношения угловых скоростей движения планеты по петлеобразной орбите, равной пять десятых; на фиг. 8 - петлеобразная орбита свободно вращающейся планеты при значении отношения угловых скоростей ее движения  на фиг. 9 - сечение по А-А на фиг. 1; на фиг. 10 - регулирующее устройство; на фиг. 11 - установка для имитации движения планет по петлеобразным орбитам; на фиг. 12 - схема действующих сил во вращающемся теле при Wкр его центра массы (R = 0); на фиг. 13 - схема действующих сил во вращающемся теле, имитирующем планету, при его движении по петлеобразной орбите.
на фиг. 9 - сечение по А-А на фиг. 1; на фиг. 10 - регулирующее устройство; на фиг. 11 - установка для имитации движения планет по петлеобразным орбитам; на фиг. 12 - схема действующих сил во вращающемся теле при Wкр его центра массы (R = 0); на фиг. 13 - схема действующих сил во вращающемся теле, имитирующем планету, при его движении по петлеобразной орбите.
В имитационном способе определения вращения планеты 1, свободно движущейся по петлеобразной орбите 23, вокруг собственной оси 3 с неравномерной угловой скоростью и поворота ее петлеобразной орбиты на соответствующие угол и сторону вокруг оси 4 (О), отстоящей на соответствующем расстоянии от ее центра массы 5, от оборота к обороту планеты 1 вокруг последней 4 (О) в зависимости от величины дробной части соответствующего отношения угловых скоростей вращения планеты  обеспечивающих движение ее по петлеобразной орбите (фиг. 1-8), заключающемся в том, что вращают с помощью привода 6 основание 7 с телом 1, имитирующим планету, при этом тело 1, имитирующее планету, устанавливают на оси 8, являющейся собственной осью вращения 3 тела 1, проходящей через его центр массы 5, определяемый до его размещения на установке, внутри контейнера 9, размещенного внутри канала 10, выполненного в основании 7 консольного типа или в форме диска, соединяющего приосевую 11 и периферийную 12 зоны основания 7, при этом канал 10 выполняют с дном 13 или без дна в форме щели, а в первом случае дно 13 располагают в плоскости, перпендикулярной к оси вращения 4 вала 14, установленного в подшипниках опоры 15 и соединенного жестко с одним концом основания 7 консольного типа или с диском, устанавливаемым соосно валу 14, внутри канала 10 в продольном его направлении размещают на расстоянии l друг от друга две идентичные по своим характеристикам пружины 16, 17, граничащие, по крайней мере, каждым из концов со своим ползуном 18, 19, 20, 21, свободно перемещающимся в продольном направлении канала 10, или при этом каждым смежным концом из них - с соответствующей стенкой контейнера 9, а в первом случае между внутренними ползунами 18, 19, установленными между смежными концами пружин 16, 17, размещают вышеуказанный контейнер 9 с возможностью свободного перемещения в продольном направлении канала 10 с минимальным коэффициентом трения о поверхности контакта с последним, привод 6 соединяют с валом 14 с возможностью плавного регулирования частоты вращения 12 последнего, а тело 1, имитирующее планету, снабжают отметчиками угла поворота 22, равномерно распределенными вокруг оси 8, на которой оно устанавливается в контейнере 9, один из которых является базовым отметчиком угла поворота тела 1, имитирующего планету, изменяют силу сжатия указанных выше пружин 16, 17, минимальное значение которой может равняться нулю, с помощью соединительного устройства 23, связывающего между собой внешние ползуны 20, 21 и позволяющего перемещать их в ту или иную сторону, измеряют частоту вращения n вала 14, по крайней мере, размещенного в вакуумной камере, и регулируют ее до установления равенства длин l1 и l2 обеих пружин для достижения критического значения окружной скорости Wкр центра массы 5 тела 1, имитирующего планету, на соответствующем радиусе rц.м.. его вращения, определяемом с помощью измерительного устройства 24, которое рассчитывают по формуле
обеспечивающих движение ее по петлеобразной орбите (фиг. 1-8), заключающемся в том, что вращают с помощью привода 6 основание 7 с телом 1, имитирующим планету, при этом тело 1, имитирующее планету, устанавливают на оси 8, являющейся собственной осью вращения 3 тела 1, проходящей через его центр массы 5, определяемый до его размещения на установке, внутри контейнера 9, размещенного внутри канала 10, выполненного в основании 7 консольного типа или в форме диска, соединяющего приосевую 11 и периферийную 12 зоны основания 7, при этом канал 10 выполняют с дном 13 или без дна в форме щели, а в первом случае дно 13 располагают в плоскости, перпендикулярной к оси вращения 4 вала 14, установленного в подшипниках опоры 15 и соединенного жестко с одним концом основания 7 консольного типа или с диском, устанавливаемым соосно валу 14, внутри канала 10 в продольном его направлении размещают на расстоянии l друг от друга две идентичные по своим характеристикам пружины 16, 17, граничащие, по крайней мере, каждым из концов со своим ползуном 18, 19, 20, 21, свободно перемещающимся в продольном направлении канала 10, или при этом каждым смежным концом из них - с соответствующей стенкой контейнера 9, а в первом случае между внутренними ползунами 18, 19, установленными между смежными концами пружин 16, 17, размещают вышеуказанный контейнер 9 с возможностью свободного перемещения в продольном направлении канала 10 с минимальным коэффициентом трения о поверхности контакта с последним, привод 6 соединяют с валом 14 с возможностью плавного регулирования частоты вращения 12 последнего, а тело 1, имитирующее планету, снабжают отметчиками угла поворота 22, равномерно распределенными вокруг оси 8, на которой оно устанавливается в контейнере 9, один из которых является базовым отметчиком угла поворота тела 1, имитирующего планету, изменяют силу сжатия указанных выше пружин 16, 17, минимальное значение которой может равняться нулю, с помощью соединительного устройства 23, связывающего между собой внешние ползуны 20, 21 и позволяющего перемещать их в ту или иную сторону, измеряют частоту вращения n вала 14, по крайней мере, размещенного в вакуумной камере, и регулируют ее до установления равенства длин l1 и l2 обеих пружин для достижения критического значения окружной скорости Wкр центра массы 5 тела 1, имитирующего планету, на соответствующем радиусе rц.м.. его вращения, определяемом с помощью измерительного устройства 24, которое рассчитывают по формуле ,
,
где Wкр - критическое значение окружной скорости, м/с;
rц.м. - радиус вращения центра массы тела, м;
n - частота вращения вала, с-1,
после этого тело 1, имитирующее планету, приводят во вращение вокруг оси 8, на которой оно установлено, соединенным с указанной осью 8 приводом, регулируют частоту вращения n0 вокруг собственной оси 8, затем отсоединяют ось 8 от привода и записывают траекторию движения тела 1, представляющую собой петлеобразную орбиту движущейся планеты, с помощью регистрирующего устройства 24 и одновременно производят регистрацию времени прохождения каждым из отметчиков угла поворота 22 тела 1, имитирующего планету, вокруг собственной оси 8 на угол ϕ, определяемый каждой смежной парой отметчиков угла поворота 22 и отсчитываемый для каждой из смежных пар вышеуказанных отметчиков угла поворота 22 от базовой отметки 25, рассчитывают угловую скорость вращения ωoi тела 1, имитирующего планету, на каждом из вышеуказанных углов поворота ϕ, определяемых смежными парами отметчиков угла поворота 22 тела 1, имитирующего планету, и определяют среднее значение угловой скорости вращения ωoср тела 1, имитирующего планету, вокруг собственной оси 8, а наличие разницы в значениях между вышеуказанными первыми ωoi и последней ωocp угловыми скоростями вращения тела 1, имитирующего планету, определяет вращение последнего с неравномерной угловой скоростью в пределах одного оборота вокруг собственной оси вращения 8 при сохранении постоянной частоты вращения n0 = const вокруг последней, затем осью 8, на которой устанавливается тело 1, имитирующее планету, соединяют с приводом и регулируют частоту его вращения n0 вокруг собственной оси 8 для достижения соответствующего значения отношения угловой скорости вращения ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8, пересекающей его центр массы 5, к угловой скорости вращения ω тела 1, имитирующего планету, по петлеобразной орбите, равного целому числу, после чего записывают траекторию его движения по петлеобразной орбите 2, фиксируя при этом границы вышеуказанной траектории в пределах одного оборота тела 1, имитирующего планету, по петлеобразной орбите с помощью базового отметчика угла поворота, а затем при прочих равных условиях последовательно изменяют вышеуказанное отношение угловых скоростей  на величину, не превышающую 0,5 в сторону ее уменьшения или увеличения за счет изменения угловой скорости вращения ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8 и после каждого такого изменения угловой скорости ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8 записывают траекторию его движения по петлеобразной орбите 2, фиксируя границы траектории движения тела 1 за один его оборот по петлеобразной орбите 2 вышеуказанным путем, т. е. с помощью базового отметчика угла поворота, при этом каждое изменение дробной части вышеуказанного отношения угловых скоростей вращения
на величину, не превышающую 0,5 в сторону ее уменьшения или увеличения за счет изменения угловой скорости вращения ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8 и после каждого такого изменения угловой скорости ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8 записывают траекторию его движения по петлеобразной орбите 2, фиксируя границы траектории движения тела 1 за один его оборот по петлеобразной орбите 2 вышеуказанным путем, т. е. с помощью базового отметчика угла поворота, при этом каждое изменение дробной части вышеуказанного отношения угловых скоростей вращения  тела 1, имитирующего планету, при прочих равных условиях за счет уменьшения или увеличения целого значения вышеуказанного отношения угловых скоростей
тела 1, имитирующего планету, при прочих равных условиях за счет уменьшения или увеличения целого значения вышеуказанного отношения угловых скоростей  движения тела 1 по петлеобразной орбите 2 на величину в пределах от значения больше нуля, но меньше 0,5, приводит к возникновению вращения петлеобразной орбиты движения тела 1, имитирующего планету, от оборота к обороту его вокруг оси 4 вышеуказанной орбиты соответственно в сторону, совпадающую с направлением движения последнего 1 по петлеобразной орбите, или в сторону, противоположную вышеуказанному направлению движения тела 1 по орбите, а при значении дробной части вышеуказанного отношения угловых скоростей
движения тела 1 по петлеобразной орбите 2 на величину в пределах от значения больше нуля, но меньше 0,5, приводит к возникновению вращения петлеобразной орбиты движения тела 1, имитирующего планету, от оборота к обороту его вокруг оси 4 вышеуказанной орбиты соответственно в сторону, совпадающую с направлением движения последнего 1 по петлеобразной орбите, или в сторону, противоположную вышеуказанному направлению движения тела 1 по орбите, а при значении дробной части вышеуказанного отношения угловых скоростей  движения планеты по петлеобразной орбите, равной пять десятых, через каждый оборот планеты по петлеобразной орбите происходит чередование пространственного расположения последней относительно системы координат, одна из осей которой совпадает с осью 4 петлеобразной орбиты, а при одинаковых значениях угловых скоростей, обеспечивающих движение планеты по петлеобразной орбите, последняя приобретает форму, образующуюся при сопряжении двух полуэллипсов 26, 27, один 26 из которых охватывает снаружи одну половину круговой орбиты вращения тела 1 в состоянии невесомости при отсутствии его вращения вокруг собственной оси, а второй 27 полуэллипс располагается внутри другой половины вышеуказанной круговой орбиты (фиг. 8).
движения планеты по петлеобразной орбите, равной пять десятых, через каждый оборот планеты по петлеобразной орбите происходит чередование пространственного расположения последней относительно системы координат, одна из осей которой совпадает с осью 4 петлеобразной орбиты, а при одинаковых значениях угловых скоростей, обеспечивающих движение планеты по петлеобразной орбите, последняя приобретает форму, образующуюся при сопряжении двух полуэллипсов 26, 27, один 26 из которых охватывает снаружи одну половину круговой орбиты вращения тела 1 в состоянии невесомости при отсутствии его вращения вокруг собственной оси, а второй 27 полуэллипс располагается внутри другой половины вышеуказанной круговой орбиты (фиг. 8).
При этом тело 1, имитирующее планету, на оси 8 может быть установлено жестко (фиг. 1, 2, 9); тело 1, имитирующее планету, может быть установлено в контейнере 9 на установленной в подшипниках 28 контейнера 9 оси 8, по меньшей мере, параллельной оси 4 вала 14, с возможностью свободного перемещения вдоль указанной оси 8, например, за счет шлицевого соединения, а также обеспечения свободы перемещения телу 1 путем деформирования соосно установленных пружин 29, граничащих каждая одной стороной с телом 1, а другой стороной - с торцом 30 соответствующего подшипника 28, внутри которых проходят участки оси 8, расположенные по обе стороны тела 1, имитирующего планету, записывают регистрирующим устройством 24 траекторию перемещения ±Y тела 1, имитирующего планету, вдоль оси 8, а до приведения оси 8 с указанным телом 1 во вращение фиксируют последнее на оси 8 устройством 31, исключающим перемещение тела 1, имитирующего планету, вдоль оси 8 (фиг. 1, 2, 9); на каждом режиме имитации движения планет может быть установлено новое значение радиуса rц.м. вращения центра массы 5 тела 1, имитирующего планету, путем регулирования величины одновременного перемещения ±X в ту или иную сторону внешних ползунов 20, 21 с помощью регулирующего устройства 32 величины указанного перемещения внешних ползунов 20, 21, которым снабжают соединительное устройство 23 указанных ползунов 20, 21 (фиг. 1, 2, 10); может быть произведена остановка привода 6, обеспечивающего вращение основания 7 с телом 1, имитирующим планету, и при прочих равных условиях при соответствующих значениях угловой скорости вращения ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8 аналогичным рассмотренному способом определена угловая скорость вращения ωoi тела 1, имитирующего планету, на каждом из углов поворота ϕ, определяемых смежными парами отметчиков углов поворота 22 тела 1, имитирующего планету, и определено среднее значение угловой скорости вращения ωocp тела 1, имитирующего планету, вокруг собственной оси 8, а наличие разницы в значениях между вышеуказанными первыми ω′oi и последней ωocp угловыми скоростями вращения тела 1, имитирующего планету, определяет вращение последнего с неравномерной угловой скоростью в пределах одного оборота вокруг собственной оси вращения 8 при сохранении постоянной частоты вращения вокруг последней, а затем полученные результаты в двух вышерассмотренных случаях определения вращения тела 1, имитирующего планету, вокруг собственной оси 8 с неравномерной угловой скоростью сравнивают, а несоизмеримо большая разница между максимальными значениями отклонений угловых скоростей вращения тела 1, имитирующего планету, в пределах одного оборота вокруг собственной оси вращения 8 от среднего ее значения при повороте тела 1 на один оборот вокруг вышеуказанной оси 8 между первым и вторым сравниваемым случаем свидетельствует о достоверности полученных результатов, подтверждающих вращение планеты, свободно движущейся по петлеобразной орбите, вокруг собственной оси с неравномерной угловой скоростью (фиг, 1, 2).
Имитационный способ определения вращения планеты, свободно движущейся по петлеобразной орбите, вокруг собственной оси с неравномерной угловой скоростью и поворота ее петлеобразной орбиты на соответствующие угол и сторону вокруг оси, отстоящей на соответствующем расстоянии от ее центра массы, от оборота к обороту планеты вокруг последней в зависимости от величины дробной части соответствующего отношения угловых скоростей вращения планеты, обеспечивающих движение ее по петлеобразной орбите, основан на открытом автором Всемирном законе тяготения - Фундаментальном законе мироздания, включающем в себя двадцать основных законов вращающегося тела.
Всемирный закон тяготения - Фундаментальный закон мироздания гласит: 1. Абсолютное движение всякого тела есть движение вращения. Абсолютного прямолинейного движения тел в природе не существует; такое движение может быть при бесконечно большой скорости тела, чего достичь невозможно. Вращение тела в состоянии его невесомости при критическом значении окружной скорости его центра массы на соответствующем радиусе вращения при отсутствии внешних воздействий на него может происходить сколь угодно долго.
2. Всякое тело, свободно вращающееся вокруг оси на соответствующем удалении его центра массы от последней, при изменении окружной скорости под воздействием внешней силы изменяет радиус своего вращения на величину, соответствующую величине изменения окружной скорости центра массы тела, а именно, при увеличении окружной скорости тело переходит на увеличенный радиус своего вращения, а при уменьшении окружной скорости - на уменьшенный радиус своего вращения. При этом, если тело при вращении каким-то образом удерживается от возможного перемещения в направлении к оси его вращения или в направлении от вышеуказанной оси, то при изменении окружной скорости его центра массы под воздействием внешней силы в теле возникают напряжения растяжения или сжатия, значение которых соответствует величине увеличения или уменьшения окружной скорости центра массы тела, а направление действия растягивающих или сжимающих усилий определяется местом удержания тела от вышеуказанных перемещений, которое может располагаться на стороне внутренней траектории, описываемой при вращении телом, или на стороне его внешней траектории вращения. Так, при увеличении окружной скорости центра массы тела выше ее критического значения для данного радиуса вращения и расположении места удержания тела от перемещения на стороне его внутренней траектории в теле возникают напряжения растяжения, а при расположении места удержания тела на стороне его внешней траектории в указанном случае в теле возникают напряжения сжатия, и, наоборот, при уменьшении окружной скорости центра массы тела ниже ее критического значения для данного радиуса вращения и расположении места удержания тела от перемещения на стороне его внутренней траектории в теле возникают напряжения сжатия, а при расположении места удержания тела на стороне его внешней траектории в последнем случае в теле возникают напряжения растяжения.
3. Свободное круговое вращение всякого тела вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, при одновременном вращении тела и вокруг собственной оси, проходящей через его центр массы, и отсутствии внешних воздействий на него возможно только в случае, когда тело имеет форму шара и его центр массы совпадает с центром шара; в иных случаях свободного вращения всякого тела вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, при одновременном вращении тела и вокруг собственной оси, проходящей через его центр массы, и отсутствии внешних воздействий на него в процессе вращения тела вокруг собственной оси происходит смещение центра массы тела, а вместе с ним и оси его вращения относительно системы координат, связанной с телом, приводящее к движению тела по петлеобразной орбите.
4. Всякое тело (планета), свободно вращающееся в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, с течением времени, определяемым природой, формой, размерами и другими характеристиками тела, делится на части благодаря происходящим внутри тела деформационным процессам и действующим на него изгибающим моментам, вызываемым внутренними силами тела. При этом деление тела (планеты) на части в зависимости от его формы, места и характера разлома происходит следующим образом: большая часть разделяемого тела под действием вращающего момента, вызываемого возникающими при его делении на части неуравновешенными внутренними силами, получает вращение вокруг собственной оси, проходящей через центр массы вышеуказанной части тела, и одновременно переходит на новый радиус вращения в состоянии невесомости вокруг оси, отстоящей на расстоянии вышеуказанного радиуса от ее центра массы, а собственная ось вращения при этом либо пересекает плоскость орбиты вышеуказанного вращения тела в состоянии невесомости, либо собственная ось вращения располагается в плоскости этой орбиты и является касательной к ней; меньшая часть разделяемого тела под действием возникающих при его делении на части неуравновешенных сил либо переходит на новую орбиту свободного вращения в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от ее центра массы; либо начинает свободно вращаться в состоянии невесомости на орбите вокруг большей части тела, перемещаясь одновременно в пересекающем вышеуказанное ее вращение направлении вдоль орбиты вращения большей части тела в состоянии невесомости, описываемой центром вышеуказанной орбиты свободного вращения меньшей части тела в состоянии невесомости; либо начинает свободно вращаться в состоянии невесомости на орбите вокруг большей части тела, плоскость которой совпадает с плоскостью орбиты вращения большей части тела в состоянии невесомости, вдоль которой одновременно с вышеуказанным вращением перемещается центр орбиты свободного вращения меньшей части тела в состоянии невесомости; либо под действием вращающего момента, вызываемого возникающими при делении тела на части неуравновешенными внутренними силами, получает вращение вокруг собственной оси, проходящей через центр массы вышеуказанной части тела, и одновременно переходит на новый радиус вращения в состоянии невесомости вокруг оси, отстоящей на расстоянии вышеуказанного радиуса от ее центра массы, а собственная ось вращения при этом либо пересекает плоскость орбиты вышеуказанного вращения рассматриваемой части тела в состоянии невесомости, либо собственная ось вращения располагается в плоскости этой орбиты и является касательной к ней.
5. Всякое тело (планета), свободно вращающееся в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, и при этом одновременно вращающееся вокруг собственной оси, проходящей через его центр массы и пересекающей плоскость орбиты вышеуказанного вращения тела в состоянии невесомости, сохраняет свою целостность вследствие действия внутренней силы, приложенной к любой точке тела, в направлении к центру массы последнего. При вышеуказанных условиях тело, имеющее форму, отличающуюся от шарообразной, под действием достаточных внутренних сил, определяемых природой, размерами и другими характеристиками тела, изменяющих во времени свою величину в любом месте их приложения внутри тела, с течением времени в результате деформационных процессов, происходящих в нем, приобретает шарообразную форму, а в дальнейшем происходит уплотнение тела за счет внутреннего сжатия в направлении к его ядру. Разделение тела (планеты) на части при вышеуказанных условиях возможно только в случае оказания на него достаточного для этого внешнего воздействия, которое может быть осуществлено и изнутри тела.
6. Всякое тело (планета), свободно вращающееся в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, и при этом одновременно перемещающееся в поперечном вышеуказанному его вращению направлении вдоль орбиты, описываемой центром вышеуказанного вращения тела в состоянии невесомости, сохраняет свою целостность вследствие действия внутренней силы, приложенной в любой точке тела, в направлении к центру массы последнего. При вышеуказанных условиях тело, имеющее форму, отличающуюся от шарообразной, под действием достаточных внутренних сил, определяемых природой, размерами и другими характеристиками тела, изменяющих во времени свою величину, в любом месте их приложения внутри тела, с течением времени в результате деформационных процессов, происходящих в нем, приобретает шарообразную форму, а в дальнейшем происходит уплотнение тела за счет внутреннего сжатия в направлении к его ядру. Разделение тела (планеты) на части при вышеуказанных условиях возможно только в случае оказания на него достаточного для этого внешнего воздействия, которое может быть осуществлено и изнутри тела.
7. Всякое тело (планета), свободно вращающееся в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, и при этом одновременно вращающееся вокруг собственной оси, проходящей через его центр массы, располагающейся в плоскости вышеуказанной орбиты вращения тела в состоянии невесомости и являющейся касательной к ней, с течением времени, определяемом природой, формой, размерами и другими характеристиками тела, вытягивается вдоль орбиты его вращения в состоянии невесомости, делится на части, которые впоследствии дробятся и измельчаются благодаря происходящим внутри тела деформационным процессам и действующим на него изгибающим моментам, вызываемым внутренними силами тела, а также за счет соударения образующихся частей и трения между ними при соприкосновении и взаимном перемещении друг относительно друга под действием внутренних сил каждой части тела, изменяющих во времени свою величину в любом месте их приложения внутри последней, в результате чего увеличиваются длина измельчаемого тела и его размеры как по сечению, так и по его толщине в сечении в направлении от головы к хвосту вышеуказанного тела, которое в итоге приобретает спиралеобразную форму.
8. Всякое тело (планета), свободно вращающееся в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, и при этом одновременно перемещающееся вдоль орбиты, располагающейся в плоскости орбиты свободного вращения тела в состоянии невесомости, являющейся орбитой, описываемой центром вышеуказанного вращения тела в состоянии невесомости, с течением времени, определяемом природой, размерами и другими характеристиками тела, под воздействием сжимающих усилий, возникающих внутри тела при свободном его вращении в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, и направленных к каждой точке тела по нормали к цилиндрической поверхности, описываемой радиусом вышеуказанного расстояния, вытягивается вдоль орбиты вращения его в состоянии невесомости и при этом одновременно под воздействием чередующихся во времени напряжений сжатия и растяжения внутри тела при перемещении его вдоль орбиты, являющейся орбитой, описываемой центром вращения тела в состоянии невесомости, оно вытягивается в каждом поперечном орбите свободного его вращения сечении в радиальном направлении этой орбиты, делится на части, которые благодаря происходящим внутри тела деформационным процессам впоследствии дробятся и измельчаются, в результате чего тело приобретает кольцеобразную форму, а точнее, форму диска.
9. Всякое свободно вращающееся в состоянии невесомости тело (планета), приобретая под каким-либо воздействием новое движение, сохраняет все ранее совершаемые им движения.
10. Состояние невесомости всякого свободно вращающегося тела (планеты) достигается в одном из совершаемых им движений вращения.
11. При разделении на части всякого свободно вращающегося в состоянии невесомости тела (планеты) вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, естественным путем, т.е. без какого-либо внешнего воздействия на него, под воздействием возникающих неуравновешенных сил внутри образующихся частей тела происходят соответствующие смещения их осей вращения в сохраняемом каждой образованной частью тела ранее совершаемого ей движения в составе целого тела как относительно месторасположения оси вращения тела до его разделения на части, так и относительно друг друга, продолжающиеся до достижения соответствующего критического значения окружной скорости центра массы каждой образовавшейся части тела, что обеспечивает дальнейшее ее вращение в состоянии невесомости вокруг своей смещенной вышеуказанной оси вращения.
12. Угловая скорость свободного вращения в состоянии невесомости каждой части тела (планеты), образованной при естественном разделении последнего на части, т. е. без какого-либо внешнего воздействия на тело, в сохраненном движении, которое каждая часть совершала в составе целого тела, вращавшегося в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от центра массы последнего, сохраняется неизменной и равной угловой скорости, которую имело тело до разделения на части при вращении в состоянии невесомости вокруг вышеуказанной оси.
13. Вращательное движение части тела (планеты) вокруг собственной оси, проходящей через ее центр массы, образующейся при естественном разделении на части свободно вращавшегося в состоянии невесомости тела вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, т.е. без какого-либо внешнего воздействия на тело, возникает в процессе перехода вышеуказанной части тела в состояние невесомости в сохраняемом движении, которое последняя совершала в составе целого тела, либо под воздействием появляющихся в момент разделения тела на части внутренних неуравновешенных сил, результирующая сила которых создает вращающий момент вокруг собственной оси, проходящей через центр массы части тела, или под воздействием образующихся в момент разделения тела на части внутренних сил, результирующие силы которых имеют взаимно противоположное направление и создают вращающий момент вокруг вышеуказанной собственной оси части тела, либо под воздействием внутренних сил, результирующие силы которых имеют взаимно противоположное направление и создают вращающий момент вокруг собственной оси, проходящей через центр массы части тела, и возникают с появлением в процессе перехода последней в состояние невесомости внутренних сил, имеющих противоположное направление по отношению к направлению действовавших внутренних сил в рассматриваемой части тела на момент разделения последнего на части, что определяется параметрами вращения тела в состоянии невесомости, местом и характером его разлома, размерами отделяемой части тела и другими характеристиками последней.
14. Свободное вращение в состоянии невесомости всякой части тела (планеты), образованной при естественном разделении на части свободно вращавшегося в состоянии невесомости тела, т.е. без оказания на него какого-либо внешнего воздействия, вокруг собственной оси, проходящей через центр массы соответствующей части тела, невозможно, так как для этого угловая скорость свободного вращения отделившейся части тела вокруг собственной оси должна быть велика, чего достичь невозможно, при этом отделившаяся часть тела должна представлять собой однородное и изотропное вещество и иметь форму тела вращения, что также является невозможным.
15. Всякое тело (планета), свободно вращающееся в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, и при этом одновременно вращающееся вокруг собственной оси, проходящей через его центр массы и пересекающей орбиту вышеуказанного вращения тела в состоянии невесомости, под воздействием возникающих при вращении вокруг собственной оси внутренних неуравновешенных сил, результирующая сила которых изменяет за период одного оборота тела как свою величину, так и направление действия и создает соответствующий вращающий момент вокруг собственной оси, ускоряющий или замедляющий вращение, совершает последнее вокруг собственной оси с неравномерной угловой скоростью.
16. Угловая скорость вращения центра массы всякого тела (планеты), свободно вращающегося в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, и при этом одновременно перемещающееся в поперечном вышеуказанному его вращения направлении вдоль орбиты, описываемой центром вышеуказанного вращения тела в состоянии невесомости, в процессе совершения им первого движения сохраняется неизменной во втором его одновременном с первым движении, в котором осью вращения тела является ось орбиты, описываемой центром вращения тела в состоянии невесомости во втором его движении.
17. Всякое тело (планета), свободно вращающееся по петлеобразной орбите, определяемой параметрами, при которых отношение угловой скорости его вращения вокруг собственной оси, проходящей через центр массы тела и пересекающей орбиту его вращения в состоянии невесомости, к угловой скорости вращения тела в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, равняется целому числу, при отсутствии внешних воздействий на него сохраняет неизменным пространственное расположение петлеобразной орбиты своего вращения относительно системы координат, одна из осей которой совпадает с осью орбиты вращения тела в состоянии невесомости, сколь угодно долго.
18. Петлеобразная орбита всякого свободно вращающегося тела (планеты), определяемая параметрами, при которых угловая скорость его вращения вокруг собственной оси, проходящей через центр массы тела и пересекающей орбиту его вращения в состоянии невесомости, и угловая скорость вращения тела в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, оказываются равными, приобретает форму, образующуюся при сопряжении двух полуэллипсов, один из которых охватывает снаружи одну половину круговой орбиты вращения тела в состоянии невесомости при отсутствии его вращения вокруг собственной оси, а второй полуэллипс располагается внутри другой половины вышеуказанной круговой орбиты.
19. Петлеобразная орбита всякого свободно вращающегося тела (планеты), определяемая параметрами, при которых отношение угловой скорости его вращения вокруг собственной оси, проходящей через центр массы тела и пересекающей орбиту его вращения в состоянии невесомости, к угловой скорости вращения тела в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, не равняется целому числу и числу с дробной частью, равной пять десятых, при отсутствии внешних воздействий на тело от оборота к обороту последнего вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, поворачивается на соответствующий угол, определяемый величиной вышеуказанного отношения соответствующих угловых скоростей свободного движения тела по вышеуказанной орбите, вокруг последней в одну из сторон, определяемую величиной дробной части этого отношения, относительно системы координат, одна из осей которой совпадает с осью орбиты вращения тела в состоянии невесомости.
20. Петлеобразная орбита всякого свободно вращающегося тела (планеты), определяемая параметрами, при которых значение дробной части отношения угловой скорости его вращения вокруг собственной оси, проходящей через центр массы тела и пересекающей орбиту его вращения в состоянии невесомости, к угловой скорости вращения тела в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, равно пять десятых, чередует свое пространственное расположение относительно системы координат, одна из осей которой совпадает с осью петлеобразной орбиты, через каждый оборот тела по этой орбите, а при значении вышеуказанного отношения угловых скоростей вращения тела по петлеобразной орбите, равном пять десятых, в течение одного оборота тела (планеты) по петлеобразной орбите последняя оказывается вписанной в круговую орбиту вращения тела в состоянии невесомости при отсутствии его вращения вокруг собственной оси, а в течение его другого оборота по вышеуказанной орбите последняя снаружи охватывает вышеуказанную круговую орбиту, причем каждая из орбит, чередующих свое пространственное расположение, берут свое начало в одной и той же "точке", лежащей на вышеуказанной круговой орбите.
Следует отметить, что термин "центр массы" тождественен термину "центр масс", так как под массой понимается ее интегральное значение, а также необходимо добавить, что под пересечением "плоскости орбиты" или "орбиты вращения" понимается одно и то же.
Всемирный закон тяготения - Фундаментальный закон мироздания открыт автором на основе известных научных данных, личных наблюдений автора, ранее открытого им в 1994 году закона Ерченко о свободно вращающемся вихревом потоке среды с неоднородным полем плотностей и с разной молекулярной массой компонентов [1] и выполненных автором опытных исследований.
Для реализации вышеуказанного имитационного способа определения вращения планеты 1, свободно движущейся по петлеобразной орбите 2, вокруг собственной оси 3 с неравномерной угловой скоростью и поворота ее петлеобразной орбиты на соответствующие угол и сторону вокруг оси 4 (О), отстоящей на соответствующем расстоянии rц.м. от ее центра массы 5, от оборота к обороту планеты 1 вокруг последней 4 (О) в зависимости от величины дробной части соответствующего отношения угловых скоростей вращения планеты  обеспечивающих движение ее по петлеобразной орбите, в установке (фиг. 1, 2, 3) вращают с помощью привода 6 основание 7 с телом 1, имитирующим планету 1. При этом тело 1, имитирующее планету, устанавливают на оси 8, являющейся собственной осью вращения 3 тела 1, проходящей через его центр массы 5, определенный до его размещения на установке, внутри контейнера 9, размещенного внутри канала 10, выполненного в основании 7 консольного типа или в форме диска. Канал 10 соединяет приосевую 11 и периферийную 12 зоны основания 7.
обеспечивающих движение ее по петлеобразной орбите, в установке (фиг. 1, 2, 3) вращают с помощью привода 6 основание 7 с телом 1, имитирующим планету 1. При этом тело 1, имитирующее планету, устанавливают на оси 8, являющейся собственной осью вращения 3 тела 1, проходящей через его центр массы 5, определенный до его размещения на установке, внутри контейнера 9, размещенного внутри канала 10, выполненного в основании 7 консольного типа или в форме диска. Канал 10 соединяет приосевую 11 и периферийную 12 зоны основания 7.
Канал 10 может выполняться с дном 13 или без дна в форме щели. В первом случае дно 13 располагают в плоскости, перпендикулярной к оси вращения 4 вала 14, установленного в подшипниках опоры 15 и соединенного жестко с одним концом основания 7 консольного типа или с диском, устанавливаемым соосно валу 14. Канал 10 может иметь и меньшую длину, для чего его протяженность в направлении к приосевой зоне 11 основания 7 ограничивают. Наличие дна 13 в канале 10 основания 7 определяется конструктивным выполнением контейнера 9 и его размещением в вышеуказанном канале 10 при обеспечении свободного перемещения ±X контейнера 9 внутри последнего в его продольном направлении с минимальным коэффициентом трения о поверхности контакта с каналом 10. Для этой цели могут использоваться подшипники качения или опоры на этих подшипниках и другие конструктивные решения, направленные на уменьшение потерь энергии на преодоление сил трения при перемещении контейнера 9 внутри канала 10. Так, при отсутствии дна в канале 10 контейнер 9 может иметь с каждой из боковых сторон продольные выступы, каждый из которых входит в соответствующий продольный паз, выполненный в боковой стенке канала 10, а в зазоры между трущимися поверхностями может подаваться смазка.
Внутри канала 10 в продольном его направлении размещают на расстоянии l друг от друга две идентичные по своим характеристикам пружины 16, 17, граничащие, по крайней мере, каждым из концов со своим ползуном 18, 19, 20, 21, свободно перемещающимся в продольном направлении канала 10, или при этом каждым смежным концом из них - с соответствующей стенкой контейнера 9 (фиг. 1, 2, 4). В первом случае между внутренними ползунами 18, 19, установленными между смежными концами пружин 16, 17, размещают вышеуказанный контейнер 9 с возможностью свободного перемещения в продольном направлении канала 10 с минимальным коэффициентом трения о поверхности контакта с последним.
Внутренние ползуны 18, 19 могут отсутствовать, при этом смежные концы пружин 16, 17, обращенные друг к другу, непосредственно граничат со стенками контейнера 9, упираясь в последние при силе сжатия указанных пружин больше нуля.
Привод 6 соединяют с валом 14 с возможностью плавного регулирования частоты вращения n последнего. С целью уравновешивания радиальных сил, возникающих при вращении вала 14 с основанием 7 и размещенными внутри канала 10 последнего контейнером 9 и другими элементами, вал 14 может жестко соединяться с одним концом второго основания, которое в вышеуказанном случае размещается симметрично первому основанию 7 относительно оси вращения 4 вышеуказанного вала 14. Также установка может снабжаться комплектом противовесов, имеющих разную массу. Указанные противовесы размещаются на втором основании. Кроме того, для обеспечения равномерного вращения вала 14 на нем может устанавливаться маховик.
В случае выполнения основания 7 в форме диска с целью уравновешивания радиальных сил, возникающих при вращении вала 14 с диском 7 и контейнером 9 с телом 1 внутри последнего, может выполняться второй канал 10, расположенный симметрично относительно оси 4 вала 14, в который могут быть установлены вышеуказанные элементы, включая внешние ползуны 20, 21. При применении противовесов последние размещаются на противоположной стороне диска 7 по отношению к контейнеру 9 с телом 1 симметрично относительно оси 4 вала 14.
Тело 1, имитирующее планету, снабжают отметчиками угла поворота 22, равномерно распределенными вокруг оси 8, на которой оно устанавливается в контейнере 9. При этом один из отметчиков 22 является базовым отметчиком угла поворота тела 1, имитирующего планету. Отметчики угла поворота 22 могут быть закреплены как на самом теле 1, имитирующем планету, так и вне тела 1, например, на диске, жестко соединенном с осью 8, на которой устанавливается тело 1.
Так как при регулировании частоты вращения n вала 14 для достижения критического значения окружной скорости Wкр центра массы 5 тела 1, имитирующего планету, на соответствующем радиусе его вращения в состав массы последнего фактически входит и масса контейнера 9 с осью 8, поэтому для уменьшения влияния последних на результаты имитации движения планеты в состоянии невесомости для изготовления контейнера 9 могут использоваться легкие сплавы или другие удовлетворяющие указанному требованию материалы. Также контейнер 9 может выполняться из того же материала, что и само тело 1, имитирующее планету. Могут быть использованы и другие конструктивные приемы для удовлетворения рассматриваемой задачи.
Внешние ползуны 20, 21, граничащие с концами пружин 16, 17, обращенными в противоположные стороны друг от друга, связаны между собой соединительным устройством 23, позволяющим перемещать одновременно в ту или иную сторону вышеуказанные ползуны 20, 21. А так как пружины 16, 17, внутренние ползуны 18, 19 и контейнер 9 с телом 1, имитирующим планету, расположены между внешними ползунами 20, 21, поэтому при перемещении внешних ползунов 20, 21 первые также перемещаются в том же направлении, что и внешние ползуны 20, 21.
Путем вышеуказанного одновременно перемещения внешних ползунов 20, 21 производится изменение величины радиуса rц.м. вращения тела 1, имитирующего планету, для которого при работе установки достигается критическое значение окружной скорости Wкр центра массы 5 тела 2, имитирующего планету. В зависимости от объема решаемых задач на установке по имитации движения планет по петлеобразным орбитам соединительное устройство 23 может выполняться без обеспечения им возможности вышеуказанного одновременного перемещения в ту или иную сторону внешних ползунов 20, 21.
Конструктивное выполнение соединительного устройства 23 может быть различным. Один из вариантов его выполнения представлен на фиг. 11. В дне 13 канала 10 в продольном его направлении выполнены прорезь, через которую внешние ползуны 20, 21 жестко соединены с одним из концов стержней 33, 34 соответственно, а к другом концу каждого стержня 33, 34 приварена втулка 35, 36, через отверстие в которой проходит тяга 37 с талрепом 38, соединяющим два участка тяги 37. Сама тяга 37 установлена в опорах 39, 40, закрепленных на основании 7. С опорой 39 тяга 37 соединена с возможностью свободного осевого перемещения, а с опорой 40 тяга соединена резьбовым соединением таким образом, чтобы при вращении тяги 37 в ту или иную сторону (±γ) происходило ее перемещение ±X в осевом направлении, а соответственно, и внешних ползунов 20, 21 и других элементов установки, включая контейнер 9 с телом 1, имитирующим планету, внутри него.
Соединение двух участков тяги 37 с помощью талрепа 38 позволяет изменять расстояние между внешними ползунами 20, 21 и, тем самым, изменять силу сжатия пружин 16, 17.
Для предотвращения поворота участков тяги 37 относительно талрепа 38 на концы вышеуказанных участков тяги 37 устанавливаются контргайки или используются другие способы фиксации указанных элементов тяги 37 и талрепа 38.
Установка может снабжаться комплектом сменных парных пружин, каждая сменная пара которых имеет одинаковые свои характеристики, а характеристики сменных пар при этом отличаются друг от друга, что позволяет варьировать ими путем замены одних пар пружин на другие пары для более точного установления критического значения окружной скорости Wкр центра массы 5 тела 1, имитирующего планету, на соответствующем радиусе rц.м. его вращения. При этом необходимо отметить, что масса контейнера 9 входит составной частью в массу тела 1, имитирующего планету.
Сила сжатия каждой из пружин 16, 17 может варьироваться в пределах от нуля и выше до целесообразного значения, определяемого опытным путем. Наличие пружин 16, 17 обеспечивает возможность стабилизации положения контейнера 9 с установленным в нем на оси 8 телом 1, имитирующим планету, на данном радиусе вращения центра массы 5 последнего при критическом значении его окружной скорости Wкр.
Характеристики выбираемого комплекта пружин 16, 17 зависят от массы тела 1, имитирующего планету, и радиуса вращения его центра
массы 5, для которого устанавливается критическое значение окружной скорости Wкр и других условий.
Основание 7 консольного типа, отличающееся жестким соединением с валом 14 только одним своим концом, может иметь различную внешнюю форму и форму сечений, а также различным образом соединяться с валом 14, которые определяются из условий имитации движения планеты по петлеобразной орбите, обеспечения необходимой жесткости конструкции, технологическими и иными требованиями.
Основание 7 в форме диска также может выполняться разнообразной конструкции, определяемой из условия обеспечения необходимой равномерности вращения контейнера 9 с телом 1, имитирующим планету, технологическими и иными требованиями. Так, диск 7 может быть сплошным, может состоять из ступицы, обода и соединяющих их ребер. Форма диска может быть и иной.
Для обеспечения возможности плавного регулирования частоты вращения вала 14 последний может соединяться, например, с электродвигателем, используемым в качестве привода 6.
В процессе использования имитационного способа определения вращения планеты при соответствующих условиях изменяют силу сжатия указанных выше пружин 16, 17, минимальное значение которой может равняться нулю, с помощью соединительного устройства 23 (фиг.4), связывающего между собой внешние ползуны 20, 21 и, по крайней мере, позволяющего перемещать их в ту или иную сторону, измеряют частоту вращения n вала 14, по крайней мере, размещенного в вакуумной камере, и регулируют ее до установления равенства длин l1 и l2 обеих пружин 16, 17 для достижения критического значения окружной скорости Wкр центра массы 5 тела 1, имитирующего планету, на соответствующем радиусе rц.м. его вращения, определяемом с помощью измерительного устройства 24.
Размещение имитационной установки в вакуумной камере является целесообразным, так как в противном случае на получаемые результаты исследований накладываются определенные погрешности из-за тормозящего воздействия на тело 1, имитирующее планету, атмосферного воздуха.
Рассмотрим вышеуказанное более подробно. Как отмечалось выше, рассматриваемый имитационный способ определения вращения планеты при соответствующих условиях базируется на Всемирном законе тяготения - Фундаментальном законе мироздания, открытом автором, и состоит в следующем.
Установив выбранное тело 1, имитирующее планету, в контейнер 9 на оси 8, производят измерение длин l1 и l2 обеих пружин 16, 17, величина которых должна быть одинакова независимо от установленной силы сжатия их, т.е. l1 = l1 (фиг. 1, 2, 4). Определяют с помощью измерительного устройства 24 положение, например, контейнера 9. Затем с помощью привода 6 приводят во вращение основание 7 с контейнером 9 и телом 1, имитирующим планету, внутри последнего.
При малых значениях частоты вращения n основания 7 с контейнером 9 и телом 1, имитирующим планету, когда значение окружной скорости центра массы 5 тела 1, включая массу контейнера 9, меньше ее критического значения Wкр, контейнер 9 с телом 1, имитирующим планету, перемещается в направлении к оси 4 их вращения, сжимая пружину 16, расположенную в канале 10 ближе к оси вращения 4 вала 14 с основанием 7 контейнером 9 с телом 1, имитирующим планету, уменьшая ее длину l1. При этом длина l2 пружины 17 за счет ее освобождения от сжимающей нагрузки увеличивается.
В случае достижения значения усилия сжатия пружины 17, равной нулю, вышеуказанная пружина 17 в канале 10 оказывается в свободном состоянии.
По мере увеличения частоты вращения n основания 7 с контейнером 9 и телом 1, имитирующим планету, последние перемещаются в канале 10 в направлении к периферии основания 7. При этом по достижении при перемещении контейнером 9 с телом 1, имитирующим планету, своего первоначального положения, т.е. положения перед запуском установки, когда l1 = l2, регистрируют частоту вращения n вала 14 и, зная величину радиуса rц.м.. вращения центра массы 5 тела 1, имитирующего планету, совместно с контейнером 9, рассчитывают критическое значение окружной скорости Wкр центра массы 5 тела 1, имитирующего планету, с контейнером 9 на данном радиусе их вращения по формуле
Wкр = 2 • π • rц.м. • n,
где Wкр - критическое значение окружной скорости, м/с;
rц.м. - радиус вращения центра массы тела, м;
n - частота вращения вала, с-1.
Измерение частоты вращения вала 14 основанием 7 может производиться, например, тахометром-частотомером 41 (фиг. 1, 2) или иным измерительным устройством.
В случае, когда при приведении во вращение основания 7 с телом 1, имитирующим планету, частота вращения n вала 14 достигает большего значения, чем при критическом значении окружной скорости Wкр центра массы 5 тела 1, имитирующего планету, совместно с контейнером 9 на установленном радиусе rц.м. их вращения, контейнер 9 с телом 1 в канале 10 отходит от своего первоначального положения, которое контейнер 9 занимал до запуска установки, в направлении к периферии 12 основания 7. Поэтому при снижении частоты вращения вала 14 с основанием 7 и контейнером 9 с телом 1, имитирующим планету, происходит перемещение контейнера 9 в направлении к оси вращения 4 вала 14.
Регулируя частоту вращения n вала 14 в сторону ее уменьшения, с помощью измерительного устройства 24 следят за моментом достижения контейнером 9 с телом 1 своего первоначального положения, которое они занимали в канале 10 перед запуском установки. И по измеренной частоте вращения n вала 14 с основанием 7 и контейнером 9 с телом 1, имитирующим планету, рассчитывают вышеуказанным способом по формуле Wкр = 2 • π rц.м. • n критическое значение окружной скорости Wкр центра массы 5 тела 1, имитирующего планету, с учетом массы контейнера 9 на данном радиусе их вращения, для которого измерялась частота вращения n вала 14 (фиг. 1, 2).
Для исключения выпадения контейнера 9 с телом 1, имитирующим планету, из канала 10 при больших окружных скоростях центра массы 5 тела 1, имитирующего планету, и большой частоте вращения n вала 14 канал 10 со стороны, противоположной дну 13, может закрываться с обеих сторон по его длине продольными ограничителями (пластинами) с использованием при необходимости технических решений, направленных на снижение потерь энергии на трение между ограничителями и контейнером 9 в случаях их соприкосновения при движении контейнера 9 с телом 1 в канале 10. Для этого могут использоваться разнообразные способы, обеспечивающие последнее. Конструктивные решения, используемые для предотвращения выпадания контейнера 9 с телом 1, имитирующим планету, из канала 10, могут быть разнообразные.
После достижения путем регулирования частоты вращения n вала 14 с основанием 7 критического значения окружной скорости Wкр центра массы 5 тела 1, имитирующего планету, совместно с контейнером 9 на установленном радиусе rц.м. их вращения тело 1 приводят во вращение вокруг оси 8, на которой оно установлено, соединенным с указанной осью 8 приводом, и регулируют частоту его вращения n0 вокруг собственной оси 8 (фиг. 1, 2) для установления соответствующего значения отношения угловых скоростей тела 1, имитирующего планету, обеспечивающих движение планеты по петлеобразной орбите.
Согласно Всемирному закону тяготения - Фундаментальному закону мироздания, а именно, третьему закону вращающегося тела, единственным исключением движению тела по петлеобразной орбите является случай кругового вращения тела вокруг оси, отстоящей на соответствующем расстоянии от его центра массы, при одновременном вращении тела и вокруг собственной оси, проходящей через его центр массы, и отсутствии внешних воздействий на него, когда тело имеет форму шара и его центр массы совпадает с центром О' шара 42 (фиг. 12). Указанное возможно при бесконечно малых размерах тела и бесконечно большом расстоянии центра массы тела от оси его вращения. В этом случае равнодействующая R результирующих сил (+F и -F), действующих в теле 1, имитирующем планету, по обе стороны поверхности, описываемой образующей, проходящей через центр О' шара 42 и параллельной оси О вращения тела 1, отстоящей от его центра О' на расстоянии, равном радиусу rц.м., равна нулю, а следовательно, тело 1, имитирующее планету, в указанном случае находится в состоянии невесомости.
В связи с этим вращение тела 1 вокруг оси О', проходящей через его центр массы, в последнем случае никакого влияния не оказывает на характер орбиты тела, которая сохраняется круговой.
Относительно свободного вращения тела 1 вокруг оси 4 (О), отстоящей на соответствующем расстоянии от его центра массы (фиг. 1, 2, 13), в земных условиях следует отметить следующее. Свободное движение тела в указанных условиях из-за наличия атмосферы вокруг Земли без затрат энергии на преодоление сопротивления движению тела, создаваемого воздухом атмосферы при вращении последнего, невозможно. Поэтому свободное вращение тела в рассматриваемом имитационном способе определения вращения планеты при соответствующих условиях достигается поддержанием постоянной частоты вращения n вала 14 с основанием 7 и контейнером 9 с телом 1, имитирующим планету. В данном случае на вращение только контейнера 9 с телом 1 при Wкр центра массы 5 тела 1 затрачивается лишь энергия, компенсирующая внешнее воздействие на контейнер 9 с телом 1, вызываемое сопротивлением встречного воздуха вращению первых, благодаря чему искусственным путем обеспечивается свободное вращение контейнера 9 с телом 1, имитирующим планету.
Уменьшение тормозящего воздействия окружающего воздуха при вращении контейнера 9 с телом 1 достигается использованием различных мер, одной из которых может быть применение обтекателей для воздушного потока, вызываемого вращением вала 14 с основанием 7 и контейнером 9 с телом 1, установленных на основании 7. Также могут быть использованы и другие меры для выполнения указанной выше цели, например, размещение установки для имитации движения планет по петлеобразным орбитам в вакуумной камере, широко используемой при выполнении различного рода исследований и испытаний, включая балансировку роторов турбин и других устройств.
В реальных условиях при свободном вращении тела 1 вокруг оси 4 (О), отстоящей на соответствующем расстоянии от его центра массы 5, при одновременном вращении тела 1 и вокруг собственной оси 3, проходящей через его центр массы 5, и отсутствии внешних воздействий на него в процессе вращения тела 1 (в нашем случае совместно с контейнером 9 как единым целым) происходит смещение центра массы 5, а вместе с ним и оси его вращения, относительно системы координат, связанной с телом 1, что приводит к движению тела 1 (с контейнером 9) по петлеобразной орбите (фиг. 3, 12).
На фиг. 3 показано направление избыточных результирующих усилий Δ F и - Δ F, возникающих в теле 1 при смещении его центра массы 5 к оси 4 (О) или в направлении от оси 4 (О) соответственно. Возникновением таких усилий на планете Земля, делающей за одни сутки полный оборот вокруг собственной оси, а указанные усилия возникают при этом дважды в сутки, и объясняется причина происходящих приливов, которые происходят также дважды в сутки. Возникновением избыточных внутренних усилий в самой Земле, включая и ее атмосферу, объясняются и суточные колебания атмосферного давления, а также многие другие явления, происходящие на Земле [2].
Направление вращения тела 1, имитирующего планету, вокруг оси 8, на которой оно закреплено в контейнере 9, может варьироваться благодаря использованию соответствующего привода, позволяющего изменять направление вращения оси 8. Отсюда наиболее целесообразным приводом является индивидуальный привод оси 8 от электродвигателя, который независимо от частоты вращения вала 14 обеспечивает при этом возможность устанавливать необходимую частоту вращения оси 8 с телом 1, имитирующим планету. Возможны и другие варианты приведения во вращение оси 8 с телом 1, в том числе и приводом вала 14. Однако следует при этом отметить, что использование привода вала 14 одновременно и для приведения во вращение оси 8 с телом 1 является весьма сложной технической задачей. Поэтому его использование возможно в исключительных случаях, например, при использовании рассматриваемого имитационного способа определения вращения планеты при соответствующих условиях в демонстрационных целях.
Затем отсоединяют ось 8 от привода (фиг. 1, 2) и записывают траекторию движения тела 1, предоставляющую собой петлеобразную орбиту движущейся планеты, с помощью регистрирующего устройства 24 и одновременно производят регистрацию времени прохождения каждым из отметчиков угла поворота 22 тела 1, имитирующего планету, вокруг собственной оси 8 базовой отметки путем вывода сигнала на регистрирующее устройство.
Затем определяют время τi, затрачиваемое на поворот тела 1, имитирующего планету, вокруг собственной оси 8 на угол ϕ, определяемый каждой смежной парой отметчиков угла поворота 22 и отсчитываемый для каждой из смежных пар вышеуказанных отметчиков угла поворота 22 от базовой отметки 25 (фиг. 1), которая обеспечивается путем размещения на контейнере 9 соответствующего базового приемника сигнала, возникающего при прохождении мимо последнего соответствующего отметчика угла поворота 22, при вращении тела 1, имитирующего планету, вокруг оси 8.
Рассчитывают угловую скорость вращения ωoi тела 1, имитирующего планету, на каждом из вышеуказанных углов поворота ϕ , определяемых смежными парами отметчиков угла поворота 22 тела 1, имитирующего планету, по формуле
где ωoi - угловая скорость вращения тела вокруг собственной оси, рад/с;
ϕ - угол поворота тела, определяемый смежной парой отметчиков угла поворота, град;
τi - время, затрачиваемое на поворот тела вокруг собственной оси на угол ϕ, с.
Затем определяют среднее значение угловой скорости вращения Wоср тела, имитирующего планету, вокруг собственной оси 8 по формуле
где Wоср - средняя угловая скорость вращения тела вокруг собственной оси, рад/с;
nо - частота вращения тела вокруг собственной оси, с-1;
ωoi - угловая скорость вращения тела вокруг собственной оси на угле его поворота, определяемом соответствующей смежной парой отметчиков угла поворота, рад/с;
n - суммарное количество смежных пар отметчиков угла поворота тела, равномерно распределенных вокруг его оси вращения.
Наличие разницы в значениях между вышеуказанным первым ωoi и последней ωoср угловыми скоростями вращения тела 1, имитирующего планету, определяет вращение последнего с неравномерной угловой скоростью в пределах одного его оборота вокруг собственной оси вращения 8 при сохранении постоянной частоты вращения no = const вокруг последней, что соответствует пятнадцатому закону вращающегося тела, входящему во Всемирный закон тяготения - Фундаментальный закон мироздания.
Реальным подтверждением рассмотренного является вращение Земли вокруг собственной оси в течение одних суток, т.е. одного оборота ее вокруг последней, с неравномерной угловой скоростью [3] (суточной угловой неравномерностью вращения), что вызывается возникающими при вращении Земли вокруг собственной оси внутренними неуравновешенными силами, результирующая сила которых изменяет за период одного оборота Земли как свою величину, так и направление действия, и создает соответствующий вращающий момент вокруг собственной оси, ускоряющий или замедляющий вращение. Из рассмотрения фиг. 13 следует, что в процессе вращения тела (Земли) 1 вокруг собственной оси 3 (8), пересекающей центр массы 5, происходит непрерывное перемещение последнего 5, а следовательно, и собственной оси вращения тела 1 относительно системы координат, связанной с последним, что приводит к появлению вышеуказанных внутренних неуравновешенных сил. Результатом действия этих сил (равнодействующей R) является движение тела 1 по петлеобразной орбите с вращением вокруг собственной оси 3 (8) с неравномерной угловой скоростью.
Затем ось 8, на которой устанавливается тело 1, имитирующее планету, соединяют с приводом и регулируют частоту его вращения no вокруг собственной оси 8 для достижения соответствующего значения отношения угловой скорости вращения ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8, пересекающей его центр массы 5, к угловой скорости вращения ω тела 1, имитирующего планету, по петлеобразной орбите, равного целому числу. После чего записывают траекторию его движения по петлеобразной орбите 2 (фиг. 3), фиксируя при этом границы вышеуказанной траектории в пределах одного оборота тела 1, имитирующего планету, по петлеобразной орбите с помощью базового отметчика угла поворота (фиг. 1).
В соответствии с семнадцатым законом вращающегося тела, входящим в состав Всемирного закона тяготения - Фундаментального закона мироздания, при вышеуказанных условиях, когда отношение угловых скоростей вращения тела  равняется целому числу, при отсутствии внешних воздействий на тело последнее сохраняет неизменным пространственное расположение петлеобразной орбиты своего вращения относительно системы координат, одна из осей которой совпадает с осью орбиты вращения тела в состоянии невесомости сколь угодно долго. Поэтому записанные траектории движения тела 1, имитирующего планету, по петлеобразной орбите за каждый оборот последнего по вышеуказанной орбите при совмещении совпадают.
равняется целому числу, при отсутствии внешних воздействий на тело последнее сохраняет неизменным пространственное расположение петлеобразной орбиты своего вращения относительно системы координат, одна из осей которой совпадает с осью орбиты вращения тела в состоянии невесомости сколь угодно долго. Поэтому записанные траектории движения тела 1, имитирующего планету, по петлеобразной орбите за каждый оборот последнего по вышеуказанной орбите при совмещении совпадают.
Затем при прочих равных условиях последовательно изменяют вышеуказанное отношение угловых скоростей  на величину, не превышающую 0,5, в сторону ее уменьшения или увеличения за счет изменения угловой скорости вращения ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8 и после каждого такого изменения угловой скорости ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8 записывают траекторию его движения по петлеобразной орбите 2, фиксируя границы траектории движения тела 1 за один его оборот по петлеобразной орбите 2 вышеуказанным путем, т.е. с помощью базового отметчика угла поворота (фиг. 5, 6).
на величину, не превышающую 0,5, в сторону ее уменьшения или увеличения за счет изменения угловой скорости вращения ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8 и после каждого такого изменения угловой скорости ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8 записывают траекторию его движения по петлеобразной орбите 2, фиксируя границы траектории движения тела 1 за один его оборот по петлеобразной орбите 2 вышеуказанным путем, т.е. с помощью базового отметчика угла поворота (фиг. 5, 6).
При этом в результате выполнения рассмотренного происходит следующее. Каждое изменение дробной части вышеуказанного отношения угловых скоростей вращения  тела 1, имитирующего планету, при прочих равных условиях за счет уменьшения или увеличения целого значения вышеуказанного отношения угловых скоростей
тела 1, имитирующего планету, при прочих равных условиях за счет уменьшения или увеличения целого значения вышеуказанного отношения угловых скоростей  движения тела 1 по петлеобразной орбите 2 на величину в пределах от значения больше нуля, но меньше 0,5, приводит к возникновению вращения (±ϕ) петлеобразной орбиты движения тела 1, имитирующего планету, от оборота (точка 1') к обороту (точка 2') вокруг оси 4 вышеуказанной орбиты соответственно в сторону, совпадающую с направлением движения последнего 1 по петлеобразной орбите (фиг. 5), или в сторону, противоположную вышеуказанному направлению движения тела 1 по орбите (фиг. 6), что соответствует девятнадцатому закону вращающегося тела, входящему в состав Всемирного закона тяготения - Фундаментального закона мироздания.
движения тела 1 по петлеобразной орбите 2 на величину в пределах от значения больше нуля, но меньше 0,5, приводит к возникновению вращения (±ϕ) петлеобразной орбиты движения тела 1, имитирующего планету, от оборота (точка 1') к обороту (точка 2') вокруг оси 4 вышеуказанной орбиты соответственно в сторону, совпадающую с направлением движения последнего 1 по петлеобразной орбите (фиг. 5), или в сторону, противоположную вышеуказанному направлению движения тела 1 по орбите (фиг. 6), что соответствует девятнадцатому закону вращающегося тела, входящему в состав Всемирного закона тяготения - Фундаментального закона мироздания.
Так, планета Земля, вращаясь вокруг собственной оси, пересекающей ее центр массы, совершает за сутки полный оборот вокруг последней. При этом Земля, как и Солнце, одновременно вращается и вокруг оси, отстоящей на соответствующем расстоянии rц.м. от ее центра массы, делая полный оборот по вышеуказанной орбите примерно за 365,25 суток, так как в каждые четыре года по земному календарю один из них является високосным и составляет 366 дней. И, таким образом, значение соответствующего отношения вышерассмотренных угловых скоростей движения Земли по петлеобразной орбите составит 
Поэтому при движении Земли ее петлеобразная орбита от оборота к обороту Земли вокруг петлеобразной орбиты поворачивается на соответствующий угол, определяемый значением вышеуказанного отношения угловых скоростей  ее движения.
ее движения.
При значении дробной части вышеуказанного отношения угловых скоростей  движения планеты по петлеобразной орбите, равном пять десятых, через каждый оборот (точки 1' и 2') планеты 1 по петлеобразной орбите 2 (фиг. 7) происходит чередование пространственного расположения последней относительно системы координат, одна из осей которой совпадает с осью 4 петлеобразной орбиты 2, что соответствует двадцатому закону вращающегося тела, входящему в состав Всемирного закона тяготения - Фундаментального закона мироздания.
движения планеты по петлеобразной орбите, равном пять десятых, через каждый оборот (точки 1' и 2') планеты 1 по петлеобразной орбите 2 (фиг. 7) происходит чередование пространственного расположения последней относительно системы координат, одна из осей которой совпадает с осью 4 петлеобразной орбиты 2, что соответствует двадцатому закону вращающегося тела, входящему в состав Всемирного закона тяготения - Фундаментального закона мироздания.
При одинаковых значениях угловых скоростей ω и ωo, обеспечивающих движение планеты 1 по петлеобразной орбите 2, т.е. когда их отношение  последняя приобретает форму, образующуюся при сопряжении двух полуэллипсов 26, 27 (фиг. 8), один из которых охватывает снаружи одну половину круговой орбиты вращения тела в состоянии невесомости при отсутствии его вращения вокруг собственной оси, а второй полуэллипс располагается внутри другой половины вышеуказанной круговой орбиты, что соответствует восемнадцатому закону вращающегося тела, входящему в состав Всемирного закона тяготения - Фундаментального закона мироздания.
последняя приобретает форму, образующуюся при сопряжении двух полуэллипсов 26, 27 (фиг. 8), один из которых охватывает снаружи одну половину круговой орбиты вращения тела в состоянии невесомости при отсутствии его вращения вокруг собственной оси, а второй полуэллипс располагается внутри другой половины вышеуказанной круговой орбиты, что соответствует восемнадцатому закону вращающегося тела, входящему в состав Всемирного закона тяготения - Фундаментального закона мироздания.
В случае, когда значение вышеуказанного отношения угловых скоростей  движения планеты по петлеобразной орбите равно 0,5, через каждый оборот планеты по петлеобразной орбите происходит чередование пространственного расположения последней относительно системы координат, одна из осей которой совпадает с осью 4 петлеобразной орбиты, причем в течение одного оборота планеты по петлеобразной орбите последняя оказывается вписанной в круговую орбиту вращения планеты в состоянии невесомости при отсутствии ее вращения вокруг собственной оси, а в течение ее другого оборота по вышеуказанной орбите последняя снаружи охватывает вышеуказанную круговую орбиту, причем каждая из орбит, чередующих свое пространственное расположение, берут свое начало в одной и той же "точке", лежащей на вышеуказанной круговой орбите, что соответствует двадцатому закону вращающегося тела, входящему в состав Всемирного закона тяготения - Фундаментального закона мироздания.
движения планеты по петлеобразной орбите равно 0,5, через каждый оборот планеты по петлеобразной орбите происходит чередование пространственного расположения последней относительно системы координат, одна из осей которой совпадает с осью 4 петлеобразной орбиты, причем в течение одного оборота планеты по петлеобразной орбите последняя оказывается вписанной в круговую орбиту вращения планеты в состоянии невесомости при отсутствии ее вращения вокруг собственной оси, а в течение ее другого оборота по вышеуказанной орбите последняя снаружи охватывает вышеуказанную круговую орбиту, причем каждая из орбит, чередующих свое пространственное расположение, берут свое начало в одной и той же "точке", лежащей на вышеуказанной круговой орбите, что соответствует двадцатому закону вращающегося тела, входящему в состав Всемирного закона тяготения - Фундаментального закона мироздания.
Покажем, каким образом вышеприведенное согласуется с движением планет. В качестве одной из таких планет возьмем Солнце. Исходя из четвертого закона вращающегося тела, входящего в состав Всемирного закона тяготения - Фундаментального закона мироздания, и имеющихся научных данных следует, что Солнце образовалось в результате разделения на чести какой-то гигантской сверхпланеты. Наукой установлено следующее [4]: "Галактика - звездная система, в которой мы живем, - насчитывает около 100 миллиардов звезд. Галактики обычно довольно быстро вращаются. Так Солнце, находящееся на расстоянии в 25000 световых лет от центра Галактики, делает один оборот вокруг своего центра примерно за 250 миллионов лет (скорость солнечной системы, связанной с ее движением вокруг центра, равна примерно 200 километров в секунду).
Наукой установлено существование галактического ядра с размерами около 30 световых лет. Ядро содержит ионизированный водород, концентрация которого в несколько тысяч раз больше средней концентрации водорода в галактической плоскости...".
В свою очередь с течением времени Солнце само разделилось на части с образованием планет Солнечной системы и при этом оно за счет возникших при разделении на части внутренних сил приобрело вращение вокруг собственной оси, проходящей через центр массы Солнца и пересекающей орбиту его вращения в состоянии невесомости.
Образовавшиеся планеты Солнечной системы вращаются по своим орбитам с той же угловой скоростью, что и Солнце. При этом, исходя из накопленных человечеством научных знаний и восемнадцатого закона вращающегося тела, входящего во Всемирный закон тяготения - Фундаментальный закон мироздания, можно заключить, что вращение Солнца вокруг собственной оси, проходящей через его центр массы, происходит почти с той же угловой скоростью, что и вращение его в состоянии невесомости вокруг оси, отстоящей на соответствующем расстоянии от его центра массы.
В этом случае орбита Солнца имеет форму, образующуюся при сопряжении двух полуэллипсов, один из которых охватывает снаружи одну половину круговой орбиты вращения Солнца в состоянии невесомости при отсутствии его вращения вокруг собственной оси, а второй полуэллипс располагается вокруг другой половины вышеуказанной круговой орбиты.
Поворот (вращение) именно такой орбиты Солнца вокруг оси, отстоящей на соответствующем расстоянии от ее центра массы, от оборота к обороту его вокруг последней с течением времени (циклически) приводит к возникновению на Земле глобального потепления или похолодания, т.е. наступлению ледникового периода, что связано с изменением расстояния между поверхностью Земли и Солнца в соответствующие периоды времени. При этом следует добавить, что устоявшееся мнение с вращением Земли и других планет Солнечной системы по эллиптическим орбитам является ошибочным, так как такое представление сложилось чисто иллюзорно, когда не принималось во внимание вращение Солнца в Солнечной системе по вышеуказанной орбите.
А причиной, приводящей к повороту (вращению) рассмотренной орбиты Солнца, является незначительное различие в угловых скоростях одновременного вращения последнего вокруг собственной оси, проходящей через его центр массы, и вокруг оси, отстоящей на соответствующем расстоянии от его центра массы.
Так, разница времени, в течение которого Солнце совершает один оборот вокруг собственной оси и оси, отстоящей на соответствующем расстоянии от его центра массы, составляет соответствующие доли секунды, в результате чего промежуток времени между очередными похолоданиями составляет 100 миллионов лет [4] . А так называемые взрывы, происходящие на Солнце, являются не чем иным, как вулканическими извержениями, подобными вулканическим извержениям, происходящим на Земле.
Солнце приобрело шарообразную форму с течением времени после своего разделения на планеты Солнечной системы. И за счет переменных по величине в течение одного оборота Солнца вокруг собственной оси внутренних сил, направленных к его центру, т.е. ядру Солнца, под воздействием деформационных процессов и гигантского сжатия его в недрах Солнца при очень высоких температурах образуется горючее вещество, периодически выбрасываемое из недр его наружу. Отсюда утверждения, связанные с тем, что Солнце было изначально раскаленным, а Земля остывает, так как ранее представляла собой раскаленное тело, являются спорными. Вероятнее всего, что все было иначе. Причиной всему является вращение Солнца и Земли по петлеобразным орбитам благодаря вращению и вокруг собственной оси.
В зависимости от объема решаемых задач при использовании вышеуказанного имитационного способа определения вращения планеты при соответствующих условиях тело 1, имитирующее планету, на оси 8 может устанавливаться жестко (фиг. 1, 2). Ниже будет показано, что при жесткой установке тела 1, имитирующего планету, на оси 8, т.е. когда исключается при вращении тела 1 на оси 8 его перемещение вдоль последней, движение тела 1, имитирующего планету, происходит по петлеобразной траектории (орбите), причем траектория движения центра массы 5 тела 1 располагается в плоскости, перпендикулярной к оси вращения 4 вала 14.
Для создания условий движения тела 1, имитирующего планету, по пространственной петлеобразной траектории (орбите) последнее должно иметь свободу перемещения ±Y вдоль оси 8, на которой оно установлено в контейнере 9, в ту или иную сторону (фиг. 9).
С целью расширения возможностей рассматриваемого имитационного способа определения вращения планеты при соответствующих условиях в установке для реализации имитационного способа тело 1, имитирующее планету, устанавливают в контейнере 9 на установленной в подшипниках 28 контейнера 9 оси 8, по меньшей мере, параллельной оси 4 вала 14, с возможностью свободного перемещения вдоль указанной оси 8, например, за счет шлицевого соединения, а также обеспечивают свободу перемещения телу 1 путем деформирования соосно установленных пружин 29 (фиг. 1, 2, 9).
Вышеуказанные пружины 29 граничат каждая одной стороной с телом 1, а другой стороной с торцом 30 соответствующего подшипника 28, внутри которых проходят участки оси 8, расположенные по обе стороны тела 1, имитирующего планету.
Место установки подшипников 28 в контейнере 9 определяется расположением оси 8 по отношению к оси 4 вала 14, которое может быть не только параллельным по отношению к оси 4 вала 14, ной ось 8 может быть расположена под любым необходимым в исследованиях углом.
В процессе использования имитационного способа определения вращения планеты при соответствующих условиях записывают регистрирующим устройством 24 траекторию перемещения ±Y тела 1, имитирующего планету, вдоль оси 8, а до приведения оси 8 с указанным телом 1 во вращение фиксируют последнее на оси 8 устройством 31, исключающим перемещение тела 1, имитирующего планету, вдоль оси 8 (фиг.9). Исключение перемещения тела 1, имитирующего планету, вдоль оси 8 до приведения во вращение последней с телом 1 обеспечивает более точную установку критического значения окружной скорости Wкр центра массы 5 тела 1 при осуществлении регулирования частоты вращения n вала 14 с основанием 7 и размещенного на последнем контейнера 9 с телом 1, имитирующим планету.
Установка для реализации имитационного способа определения вращения планеты при соответствующих условиях может не иметь указанного устройства 31, что зависит от объема решаемых задач на ней, а также расположения оси 8, на которой устанавливается тело 1, имитирующее планету, в контейнере 9, по отношению к оси 4 вала 14.
При расположении оси 8 тела 1, имитирующего планету, в контейнере 9 параллельно оси 4 вала 14 с основанием 7 при вращении последнего и одновременном вращении тела 1 как вокруг оси 4, так и вокруг оси 8, на которой оно установлено внутри контейнера 9, движение тела 1 происходит по петлеобразной траектории (орбите), причем траектория движения центра массы 5 тела 1, имитирующего планету, располагается в плоскости, перпендикулярной к оси 4 вала 14.
В случае расположения оси 8 под углом к оси 4 вала 14 при одновременном вращении тела 1, имитирующего планету, как вокруг оси 4, так и вокруг оси 8, на которой тело 1 установлено в контейнере 9, движение тела 1 происходит по пространственной петлеобразной траектории (орбите), что обеспечивается в дополнение к свободному перемещению тела 1, имитирующего планету, с контейнером 9 в канале 10 свободой перемещения ±Y тела 1 вдоль оси 8 в ту или иную сторону (фиг. 1, 2, 9) за счет деформации пружин 29 в направлении, совпадающем с направлением оси 8, на которой тело 1, имитирующее планету, установлено в контейнере 9. С помощью регистрирующего устройства 24 записывается траектория вышеуказанного перемещения ±Y по углу поворота оси 8 тела 1, имитирующего планету, вдоль шлицевого соединения с вышеуказанной осью 8 (фиг. 9).
Обеспечение свободного перемещения ±Y тела 1, имитирующего планету, в направлении, совпадающем с направлением оси 8, на которой оно установлено в контейнере 9, может достигаться и иными конструктивными решениями.
Установка для реализации имитационного способа определения вращения планеты при соответствующих условиях может снабжаться системой автоматического регулирования с выводом измеряемых параметров на электронно-вычислительную машину для их обработки и выдачи результатов исследования.
Концы пружин 29 могут опираться на пружинные шайбы, граничащие с телом 1, имитирующим планету, и с соответствующим подшипником 28 (фиг.9).
Для возможности имитации движения планеты на разных радиусах rц.м. вращения центра массы 5 тела 1, имитирующего планету, в заданных пределах изменения значений rц.м., на каждом режиме вышеуказанной имитации движения планеты устанавливают новое значение радиуса rц.м. вращения центра массы 5 тела 1, имитирующего планету, регулируя величину одновременного перемещения ±X в ту или иную сторону внешних ползунов 20, 21 с помощью регулирующего устройства 32 величины указанного перемещения ±X внешних ползунов 20, 21 (фиг. 1, 2, 10). Для выполнения последнего вышеуказанным регулирующим устройством 32 снабжают соединительное устройство 23 ползунов 20, 21.
Регулирующее устройство 32, приведенное на фиг. 10, состоит из втулки 43, свободно надетой с помощью шлицевого соединения на вал 14 для обеспечения ее осевого перемещения и вращающейся при этом вместе с валом 14, которая соединена с рычагом управления 44. С втулкой 43 жестко соединен криволинейный рычаг 45 с внутренним продольным каналом, в который своим концом входит рычаг 46 соединительного устройства 23. При перемещении втулки 43 в направлении к основанию 7 с контейнером 9 и телом 1, имитирующим планету, соединительное устройство 23 смещает внешние ползуны 20, 21 в направлении к оси вращения 4 вала 14 (фиг. 10), а при перемещении втулки 43 в направлении, противоположном вышеуказанному направлению, происходит смещение ползунов 20, 21 в направлении к периферии 12 основания 7 (фиг. 1), что в свою очередь приводит к соответствующему перемещению контейнера 9 с телом 1, имитирующим планету, внутри последнего в канале 10.
Рассмотренное регулирующее устройство 32 позволяет производить регулировку величины одновременного вышеуказанного перемещения ±X внешних ползунов 20, 21 как при вращающемся вале 14 с основанием 7, так и при их неподвижном состоянии.
Первое особенно важно при выполнении большой программы испытаний, связанной соответственно с широким диапазоном изменения значений радиусов rц.м. вращения центра массы 5 тела 1, имитирующего планету, и во многих других случаях.
Регулирующее устройство 32 может быть выполнено иной конструкции.
С целью установления большей достоверности в полученных результатах по определению вращения планеты, свободно движущейся по петлеобразной орбите, вокруг собственной оси с неравномерной угловой скоростью, производят остановку привода 6, обеспечивающего вращение основания 7 с телом 1, имитирующим планету (фиг. 1, 2). После чего при прочих равных условиях при соответствующих значениях угловой скорости вращения ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8 аналогичным рассмотренному способом определяют угловую скорость вращения ωo тела 1, имитирующего планету, вокруг собственной оси вращения 8, аналогичным рассмотренному способом определяют угловую скорость вращения ωoi тела 1, имитирующего планету, на каждом из углов поворота ϕ, определяемых смежными парами отметчиков углов поворота 22 тела 1, имитирующего планету, и определяют среднее значение угловой скорости вращения ωocp тела 1, имитирующего планету, вокруг собственной оси 8.
Затем определяют разницу между вышеуказанными значениями первых  и последней ωocp угловыми скоростями вращения тела 1, имитирующего планету, и по наличию разницы судят о вращении последнего с неравномерной угловой скоростью в пределах одного оборота вокруг собственной оси вращения 8 при сохранении постоянной частоты вращения вокруг последней.
и последней ωocp угловыми скоростями вращения тела 1, имитирующего планету, и по наличию разницы судят о вращении последнего с неравномерной угловой скоростью в пределах одного оборота вокруг собственной оси вращения 8 при сохранении постоянной частоты вращения вокруг последней.
Полученные результаты в двух вышерассмотренных случаях определения вращения тела 1, имитирующего планету, вокруг собственной оси с неравномерной угловой скоростью сравнивают, а получаемая при сравнении несоизмеримо большая разница между максимальными значениями отклонений угловых скоростей вращения тела 1, имитирующего планету, в пределах одного оборота вокруг собственной оси вращения 8 от среднего ее значения при повороте тела 1 на один оборот вокруг вышеуказанной оси между первым и вторым сравниваемыми случаями свидетельствует о достоверности полученных результатов, подтверждающих вращение планеты, свободно движущейся по петлеобразной орбите, вокруг собственной оси с неравномерной угловой скоростью (фиг. 1, 2).
Таким образом, изобретение позволяет путем моделирования осуществить экспериментальную проверку открытого автором Всемирного закона тяготения - Фундаментального закона мироздания и открывает возможность широкого его использования при изучении астральной системы, для получения новых научных данных о Вселенной, для решения научных и технических задач, стоящих перед космонавтикой, открывает путь к созданию новых типов летательных аппаратов, а также может использоваться в иных целях.
Источники информации
1. Патент РФ N 2101643, кл. F 28 D 7/10, 1998, c.7.
2. Ричард Фейнман. Характер физических законов. Пер. с англ. под ред. Я. А.Смородинского. Изд-во "Мир", М., 1968, с. 9-34.
3. Завельский Ф. С. Время и его измерение. Изд. 4-е, перераб. "Наука", главн. ред. физ. - мат. лит-ры, М., 1977, с.108-111.
4. Ребров М. Мосты сквозь время. М., Машиностроение, 1989, с. 76-94.
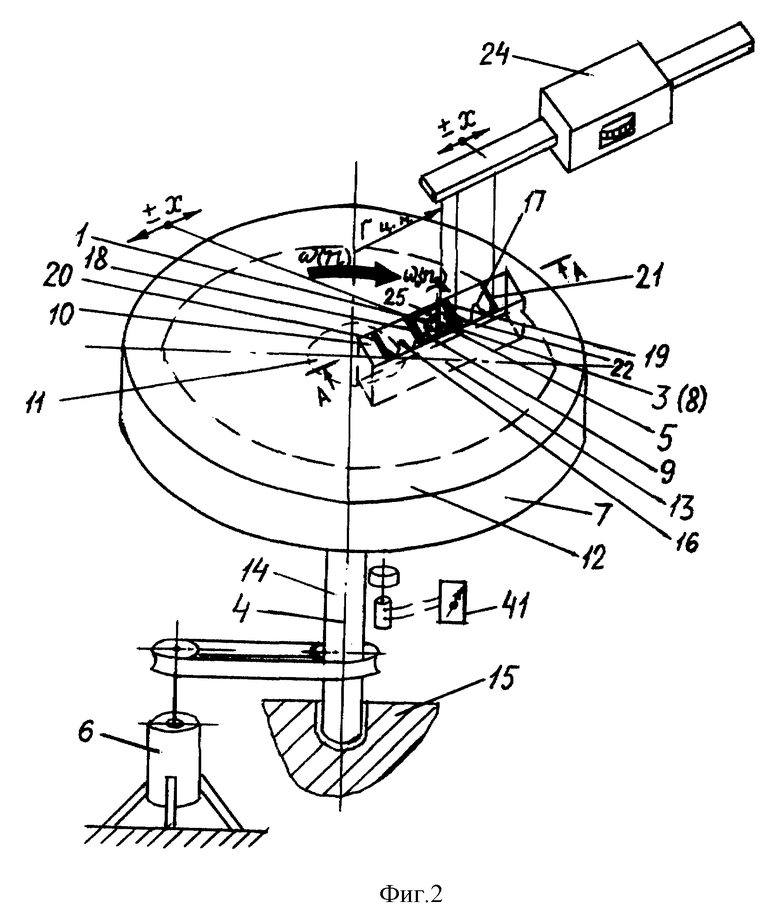
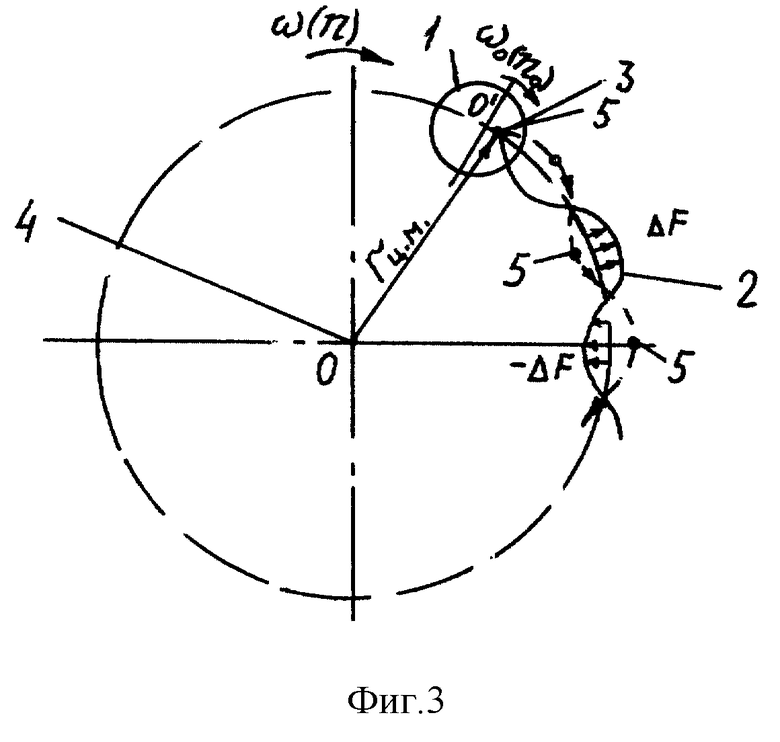
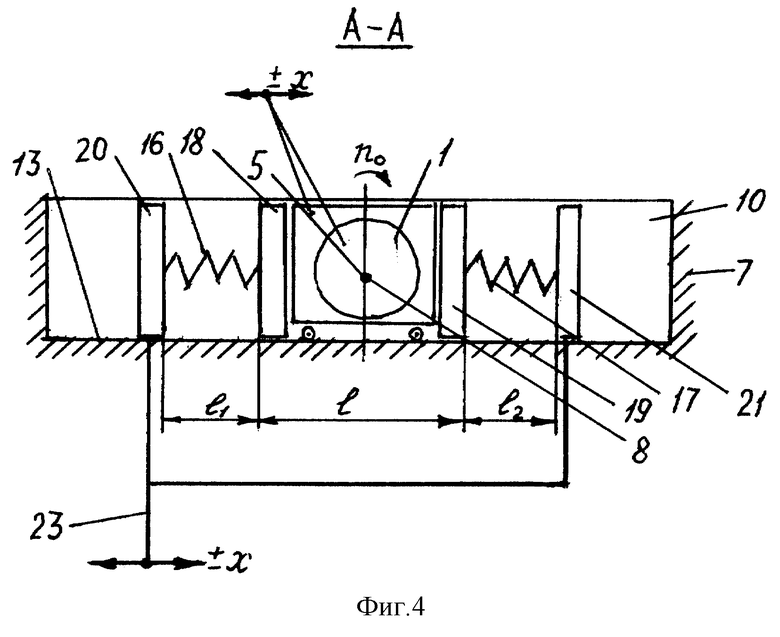
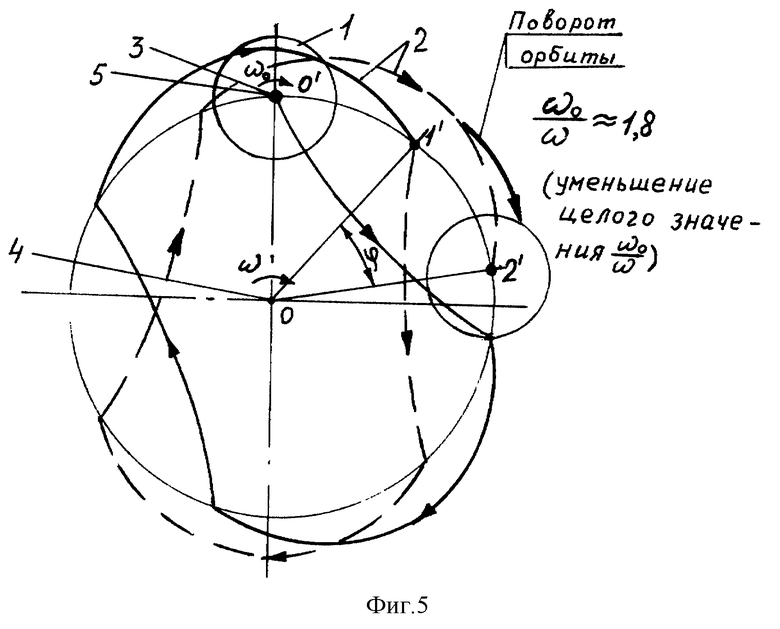
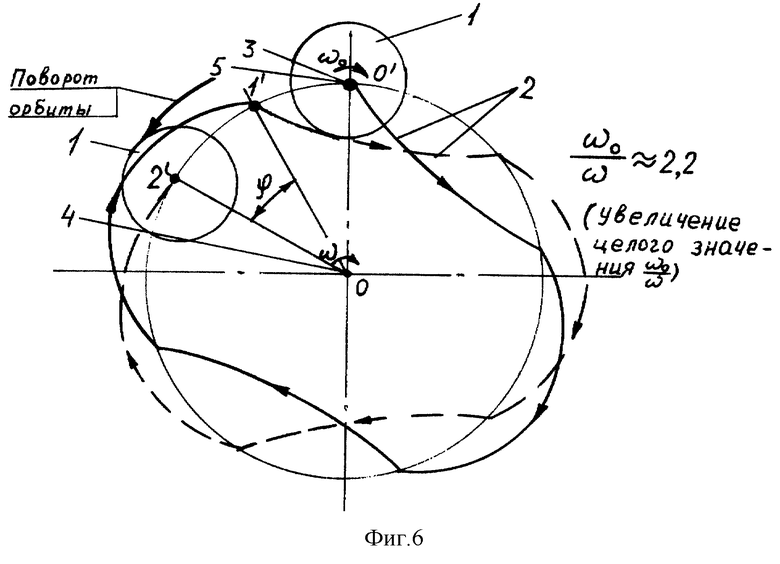
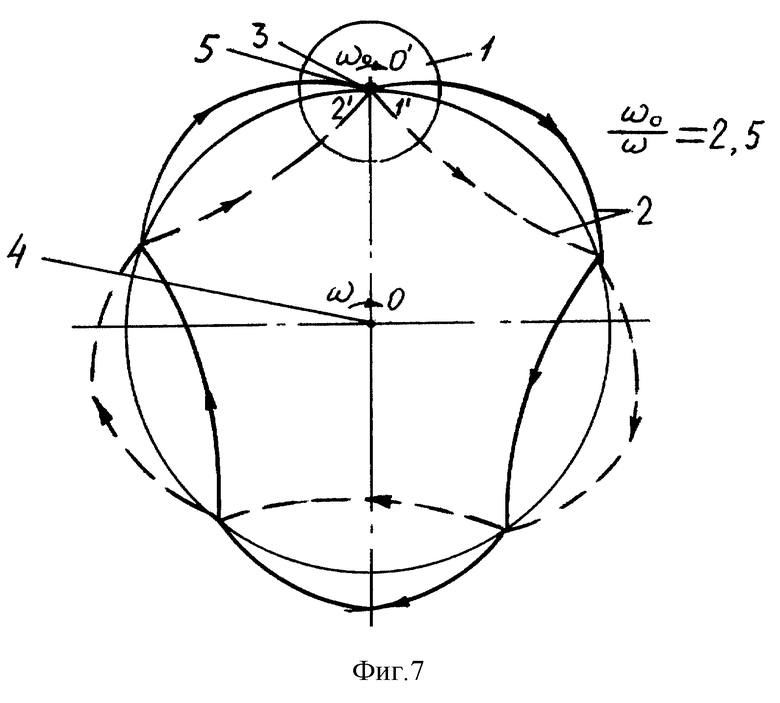
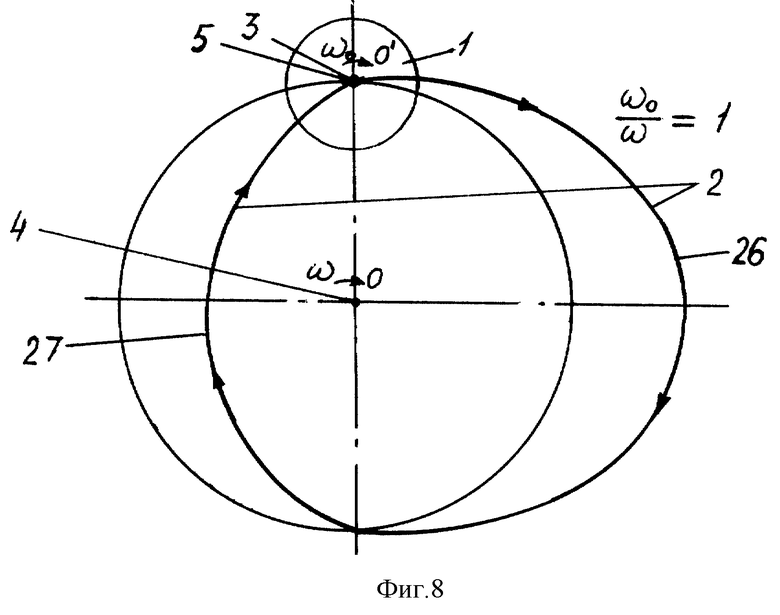
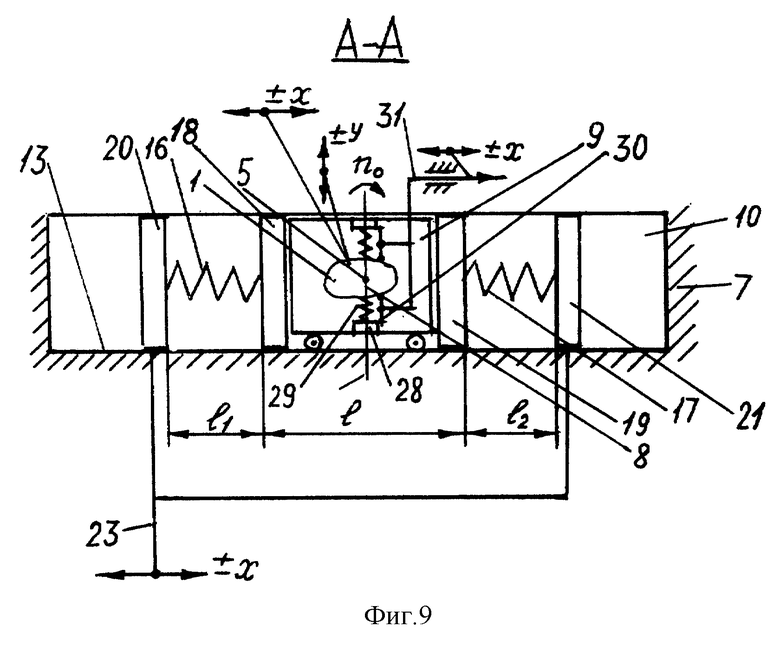
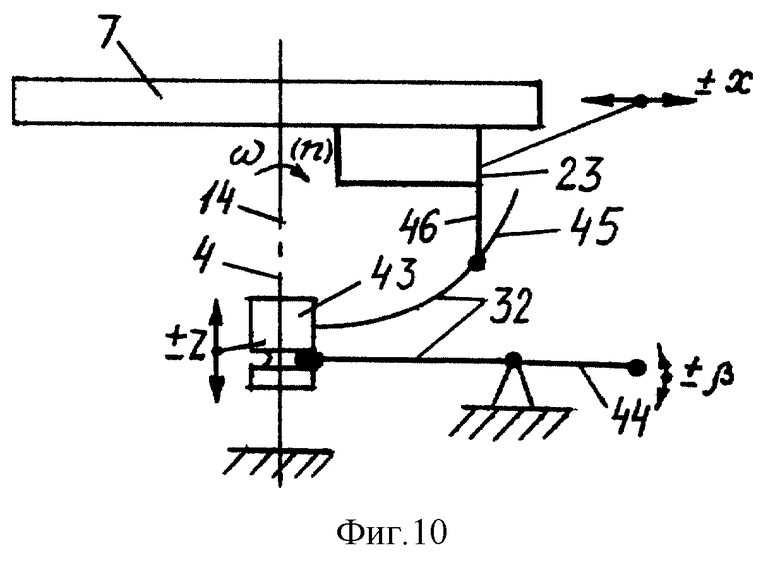
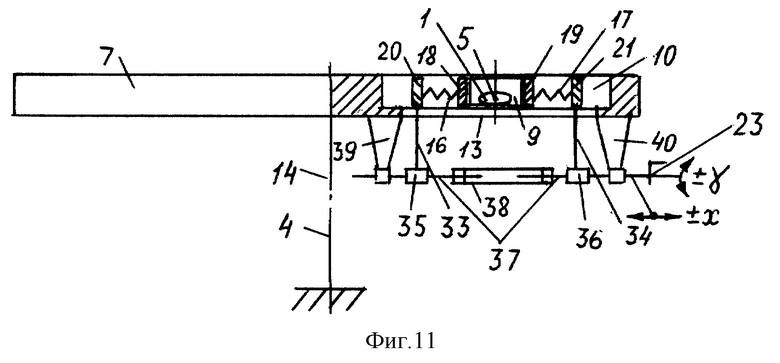
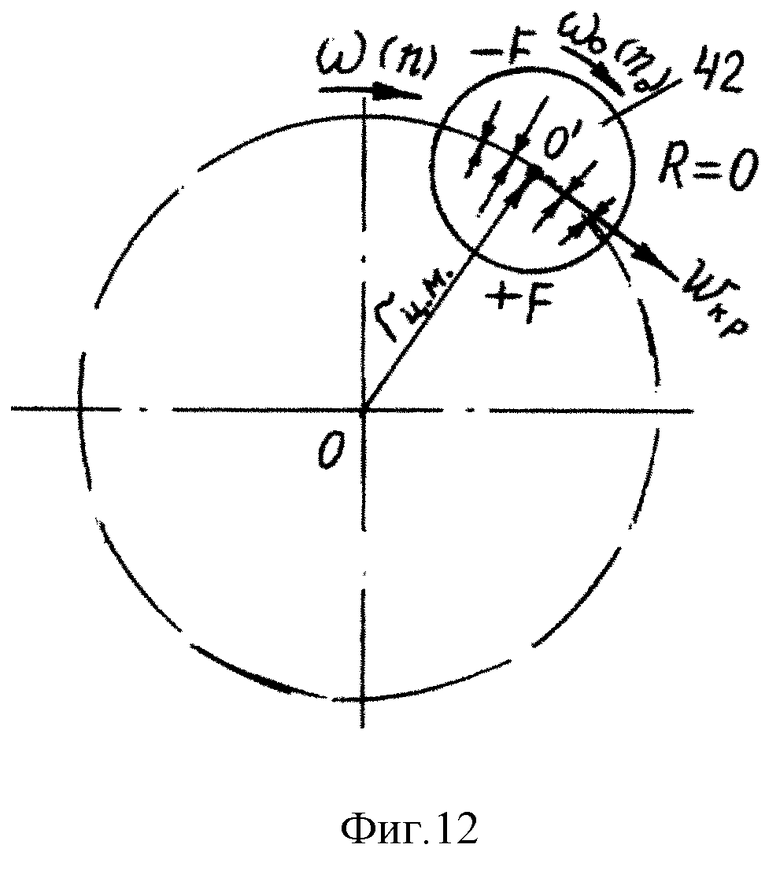
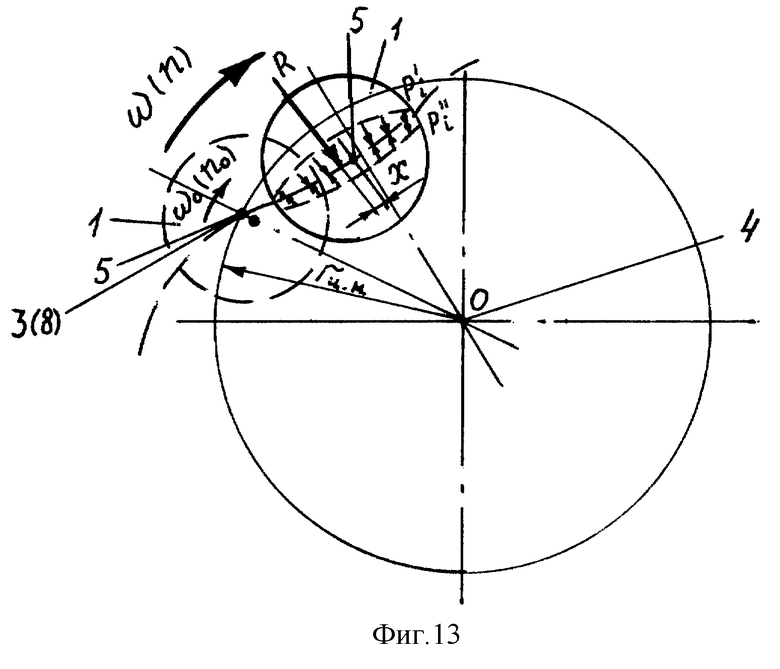
Изобретение может быть использовано при изучении астральной системы, движения планет и других небесных тел. Способ заключается в том, что вращают с помощью привода основание с телом, имитирующим планету. Тело устанавливают на оси внутри контейнера, размещенного внутри канала, выполненного в основании. Внутри канала размещают две идентичные пружины, граничащие со своим ползуном и каждым смежным концом из них - со стенкой контейнера. Изменяют силу сжатия пружин с помощью соединительного устройства, связывающего внешние ползуны и позволяющего перемещать их. Измеряют частоту вращения вала и регулируют ее до установления равенства длин обеих пружин для достижения критического значения окружной скорости центра массы тела на соответствующем радиусе его вращения. После этого тело приводят во вращение вокруг оси, на которой оно установлено, регулируют частоту его вращения, затем отсоединяют ось от привода и записывают траекторию движения тела и одновременно производят регистрацию времени прохождения каждым из отметчиков угла поворота тела базовой отметки. Определяют время, затрачиваемое на поворот тела на угол, определяемый смежной парой отметчиков угла поворота, и рассчитывают угловую скорость вращения тела на каждом из вышеуказанных углов поворота. Определяют среднее значение угловой скорости вращения тела вокруг собственной оси, а наличие разницы между вышеуказанными угловыми вращения тела скоростями определяет вращение последнего с неравномерной угловой скоростью. Затем ось, на которой устанавливается тело, соединяют с приводом и регулируют частоту его вращения вокруг собственной оси для достижения соответствующего значения отношения угловой скорости вращения тела вокруг собственной оси вращения к угловой скорости вращения тела по петлеобразной орбите. После чего записывают траекторию его движения по петлеобразной орбите, фиксируя границы траектории в пределах одного оборота тела. Способ позволяет раскрыть законы строения мироздания и процессы, происходившие и происходящие во Вселенной и астральной системе. 4 з.п. ф-лы, 13 ил.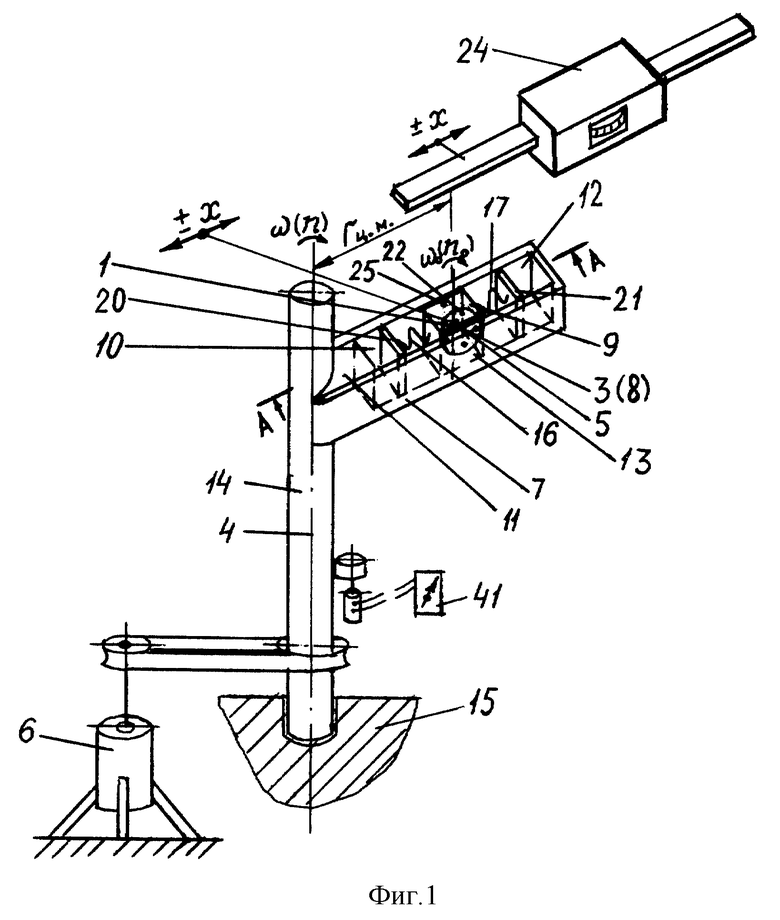
Wкр=2π•rц.м.•n,
где Wкр - критическое значение окружной скорости, м/с;
rц.м. - радиус вращения центра массы тела, м;
n - частота вращения вала, с-1,
после этого тело, имитирующее планету, приводят во вращение вокруг оси, на которой оно установлено, соединенным с указанной осью приводом, регулируют частоту его вращения вокруг собственной оси, затем отсоединяют ось от привода и записывают траекторию движения тела, представляющую собой петлеобразную орбиту движущейся планеты, с помощью регистрирующего устройства и одновременно производят регистрацию времени прохождения каждым из отметчиков угла поворота тела, имитирующего планету, вокруг собственной оси базовой отметки, определяют время, затрачиваемое на поворот тела, имитирующего планету, вокруг собственной оси на угол, определяемый каждой смежной парой отметчиков угла поворота и отсчитываемый для каждой из смежных пар вышеуказанных отметчиков угла поворота от базовой отметки, рассчитывают угловую скорость вращения тела, имитирующего планету, на каждом из вышеуказанных углов поворота, определяемых смежными парами отметчиков угла поворота тела, имитирующего планету, и определяют среднее значение угловой скорости вращения тела, имитирующего планету, вокруг собственной оси, а наличие разницы в значениях между вышеуказанными первыми и последней угловыми скоростями вращения тела, имитирующего планету, определяет вращение последнего с неравномерной угловой скоростью в пределах одного его оборота вокруг собственной оси вращения при сохранении постоянной частоты вращения вокруг последней, затем ось, на которой устанавливается тело, имитирующее планету, соединяют с приводом и регулируют частоту его вращения вокруг собственной оси для достижения соответствующего значения отношения угловой скорости вращения тела, имитирующего планету, вокруг собственной оси вращения, пересекающей его центр массы, к угловой скорости вращения тела, имитирующего планету, по петлеобразной орбите, равного целому числу, после чего записывают траекторию его движения по петлеобразной орбите, фиксируя при этом границы вышеуказанной траектории в пределах одного оборота тела, имитирующего планету, по петлеобразной орбите с помощью базового отметчика угла поворота, а затем при прочих равных условиях последовательно изменяют вышеуказанное отношение угловых скоростей на величину, не превышающую 0,5 в сторону ее уменьшения или увеличения за счет изменения угловой скорости вращения тела, имитирующего планету, вокруг собственной оси вращения и после каждого такого изменения угловой скорости тела, имитирующего планету, вокруг собственной оси вращения записывают траекторию его движения по петлеобразной орбите, фиксируя границы траектории движения тела за один его оборот по петлеобразной орбите вышеуказанным путем, т.е. с помощью базового отметчика угла поворота, при этом каждое изменение дробной части вышеуказанного отношения угловых скоростей вращения тела, имитирующего планету, при прочих равных условиях за счет уменьшения или увеличения целого значения вышеуказанного отношения угловых скоростей движения тела по петлеобразной орбите на величину в пределах от значения больше нуля, но меньше 0,5 приводит к возникновению вращения петлеобразной орбиты движения тела, имитирующего планету, от оборота к обороту его вокруг оси вышеуказанной орбиты соответственно в сторону, совпадающую с направлением движения последнего по петлеобразной орбите или в сторону, противоположную вышеуказанному направлению движения тела по орбите, а при значении дробной части вышеуказанного отношения угловых скоростей движения планеты по петлеобразной орбите, равной 0,5, через каждый оборот планеты по петлеобразной орбите происходит чередование пространственного расположения последней относительно системы координат, одна из осей которой совпадает с осью петлеобразной орбиты, а при одинаковых значениях угловых скоростей, обеспечивающих движение планеты по петлеобразной орбите, последняя приобретает форму, образующуюся при сопряжении двух полуэллипсов, один из которых охватывает снаружи одну половину круговой орбиты вращения тела в состоянии невесомости при отсутствии его вращения вокруг собственной оси, а второй полуэллипс располагается внутри другой половины вышеуказанной круговой орбиты.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

