Изобретение относится к области радиолокации и радионавигации, в частности к пеленгаторам для определения направления с измерением фазового сдвига сигналов, снимаемых с разнесенных антенн.
Известны фазовые пеленгаторы, действие которых основано на формировании векторных сумм сигналов, принятых парой разнесенных антенн, со сдвигом их по фазе на фиксированные углы, кратные π/2. Оценка разности фаз сигналов, принятых антеннами, определяется по амплитудам четырех параллельно формируемых векторных сумм сигналов, соответствующих четырем значениям сдвига фаз между суммируемыми сигналами. Пеленгаторы данного вида описаны, например, в патенте США N 3.631.491, НКИ 343/113R, МКИ G 01 S 3/46 и в патенте Франции N 2.718.252, МКИ G 01 S 3/04 (заявка N 9403665 от 29.03.94).
Наиболее близким к заявляемому является устройство пеленгации, описанное в патенте Франции N 2.718.252. Известное устройство содержит N антенн, формирователь четырех векторных сумм с высокочастотными коммутаторами входов и выходов, многоканальный приемник с детекторами огибающей и АЦП на выходах каждого канала, цифровой процессор. Недостатком известного устройства является низкая точность, обуславливаемая разбросом и нестабильностью передаточных характеристик фазосдвигающих и коммутационных высокочастотных элементов, а также сложность схемы построения. Технической задачей изобретения является повышение точности.
Решение поставленной задачи достигается тем, что в устройство пеленгации, содержащее N антенн и последовательно соединенные приемник с детектором огибающей и АЦП на выходе и цифровой процессор, введены N управляемых дискретных фазовращателей с числом позиций по сдвигу фазы М больше двух и с дискретностью по сдвигу фазы 2π/M, блок управления фазовращателями, высокочастотный сумматор с N входами, при этом управляемые дискретные фазовращатели включены соответственно между выходами антенн и входами высокочастотного сумматора, выход которого соединен со входом приемника, управляющие входы фазовращателей соединены соответственно с N выходами блока управления фазовращателями, вход сигнала синхронизации которого соединен с выходом сигнала синхронизации цифрового процессора, вырабатывающего результат измерения разности фаз сигналов ϕm,n по каждой требуемой m-ой, n-ой паре антенн по алгоритму: (1)
(1)
где: i = 1, 2,... (MN-1), MN - текущий номер комбинаций фазовых сдвигов в фазовращателях, последовательно устанавливаемых в течение рабочего цикла;
(γm-γn)i- разность фазовых сдвигов в фазовращателях m-ой, n-ой пары антенн;
xi - отсчет с выхода АЦП приемника при i-ой комбинации фазовых сдвигов в фазовращателях.
Работа предлагаемого пеленгатора поясняется блок-схемой и описанием принципа действия. На блок-схеме обозначено:
1 - антенна; 2 - управляемый дискретный фазовращатель; 3 - блок управления фазовращателями; 4 - высокочастотный сумматор; 5 - приемник с детектором огибающей и АЦП на выходе; 6 - цифровой процессор.
Управляемые дискретные фазовращатели 2 включены между выходами антенн и соответственно входами высокочастотного сумматора 4. Приемник с детектором огибающей и АЦП на выходе 5 включен между выходом высокочастотного сумматора 4 и входом цифрового процессора 6. Первый выход цифрового процессора 6 является выходом результата измерения. Второй выход цифрового процессора 6 является выходом сигнала синхронизации и соединен со входом сигнала синхронизации блока управления 3. Выходы блока управления 3 соединены с управляющими входами управляемых дискретных фазовращателей 2.
Антенны выполнены в виде слабонаправленных излучателей, ширина диаграммы направленности которых перекрывает ожидаемый диапазон углов пеленга. Фазовращатели выполнены на ферритах либо на полупроводниковых диодах с электронным управлением. Блок управления выполнен на основе двоичного регистра либо счетчика с формирователями токов или напряжений на выходах разрядов.
Устройство работает циклами, состоящими из последовательных тактов. В каждом i-ом такте рабочего цикла цифровой процессор 6 выдает в блок управления фазовращателями 3 сигнал синхронизации, содержащий номер i данного такта. Блок управления 3 вырабатывает комбинацию токов и напряжений, необходимую для установки в управляемых дискретных фазовращателях 2 определенной комбинации фазовых сдвигов, соответствующей номеру i данного такта. После окончания переходных процессов в управляемых фазовращателях и в приемнике цифровой процессор 6 считывает очередной i-ый отсчет амплитуды огибающей сигнала xi с выхода приемника, запоминает его и выдает сигнал синхронизации, содержащий номер нового (i + 1)-го такта. После окончания всех тактов рабочего цикла, общее число которых равно числу всех возможных комбинаций состояний фазовращателей, цифровой процессор вычисляет оценки разностей фаз сигналов по всем требуемым парам антенн в соответствии с алгоритмом (1).
Предполагается, что время цикла измерения существенно меньше времени корреляции сигнала по амплитуде.
Работа предлагаемого устройства базируется на использовании зависимости напряжения x на выходе квадратичного детектора огибающей суммы N высокочастотных сигналов от их амплитуд ak, начальных фаз ϕk и от значений фазовых сдвигов γk в фазовращателях. Эта зависимость описывается выражением: (2)
(2)
При наличии необходимого набора известных величин γk,l= γk-γl выражения (2) образуют систему уравнений, которая может быть решена относительно неизвестных величин ϕk,l= ϕk-ϕl.
В предлагаемом устройстве используются M позиционные фазовращатели с дискретом по сдвигу фазы 2π/M, M - целое число больше двух. В каждом рабочем цикле производится установка всех возможных комбинаций состояний фазовращателей в N каналах. При указанных условиях решение системы уравнений вида (2) соответствует алгоритму (1), реализуемому цифровым процессором.
Благодаря симметрии входной части предлагаемого устройства достигается эффект балансного подавления влияния амплитудных и фазовых погрешностей фазовращателей на результат измерения пеленга.
Предлагаемое устройство может найти применение для фазового пеленгования источников узкополосных сигналов в плоскости либо в пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОМЕТР СИГНАЛОВ ВЫСОКОЙ ИЛИ СВЕРХВЫСОКОЙ ЧАСТОТЫ | 1995 |
|
RU2101715C1 |
| УСТРОЙСТВО ИНДИКАЦИИ ОПАСНОСТИ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2131622C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПЕЛЕНГОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
SU1840092A1 |
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ФОРМИРОВАНИЯ И ВИЗУАЛИЗАЦИИ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 1997 |
|
RU2125836C1 |
| Пеленгатор СВЧ диапазона | 2016 |
|
RU2611581C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПРИХОДА ФРОНТА ВОЛНЫ В РЛС МОНОИМПУЛЬСНОГО ТИПА | 1969 |
|
SU1840606A1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383897C1 |
| Устройство командно-измерительной системы для приема независимых потоков информации | 2016 |
|
RU2623900C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2011 |
|
RU2495449C2 |
| Когерентный приемник частотно-манипулированных радиосигналов с непрерывной фазой | 1990 |
|
SU1716615A1 |
Изобретение относится к области радиолокации и радионавигации, в частности фазовым пеленгаторам. Предложен фазовый пеленгатор с N антеннами, в котором по выходам антенн введен N управляемых дискретных фазовращателей и высокочастотный сумматор. Разности фаз сигналов по каждой требуемой паре антенн вычисляются в цифровом процессоре по совокупности значений амплитуды огибающей суммарного сигнала, полученных с выхода приемника суммарного сигнала при различных комбинациях фазовых сдвигов в фазовращателях, последовательно устанавливаемых в течение каждого рабочего цикла пеленгатора. Предлагаемое устройство может найти применение для фазового пеленгования источников узкополосных сигналов в плоскости или в пространстве, что и является достигаемым техническим результатом. 1 ил.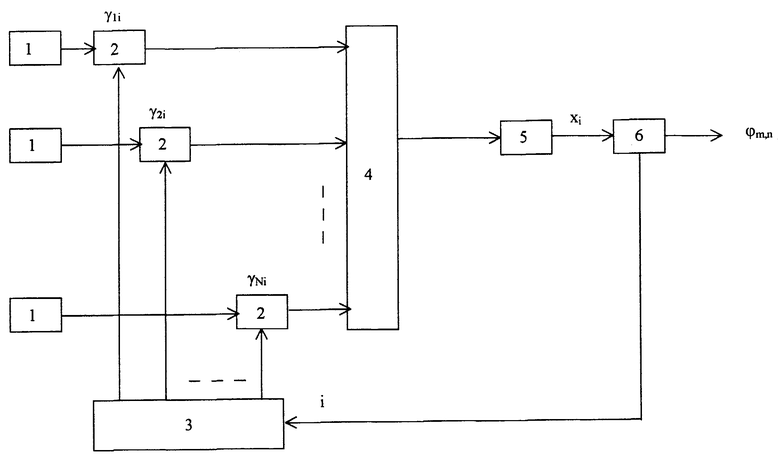
Фазовый пеленгатор, содержащий N антенн и последовательно соединенные приемник, с детектором сгибающей и АЦП на выходе и цифровой процессор, отличающийся тем, что в него введены N управляемых дискретных фазовращателей с числом позиций по сдвигу фазы М больше двух и с дискретом по сдвигу фазы 2πM, блок управления фазовращателями, высокочастотный сумматор с N входами, при этом управляемые дискретные фазовращатели включены соответственно между выходами антенн и входами высокочастотного сумматора, выход которого соединен со входом приемника, управляющие входы фазовращателей соединены соответственно с N выходами блока управления фазовращателями, вход сигнала синхронизации которого соединен с выходом сигнала синхронизации цифрового процессора, вырабатывающего результат измерения разности фаз сигналов ϕm,n по каждой требуемой m-ой, n-ой паре антенн пеленгатора по алгоритму I
где i=1,2,...(MN-1);
MN - текущий номер комбинаций фазовых сдвигов в фазовращателях, последовательно устанавливаемых в течение рабочего цикла;
(γm-γn) - разность фазовых сдвигов в фазовращателях m-ой, n-ой пары антенн;
Xi - отсчет с выхода АЦП приемника при i-ой комбинации фазовых сдвигов в фазовращателях.
| FR, 2718252 A, 29.03.94 | |||
| ТИИЭР, 1988, N 12, т.76, с.28-30 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОЙ ОБРАБОТКИ ПОВЕРХНОСТИ, В ЧАСТНОСТИ ТРАВЛЕНИЯ И ОЧИСТКИ, НАПРИМЕР, МЕТАЛЛИЧЕСКИХ, В ЧАСТНОСТИ СТАЛЬНЫХ ЛЕНТ | 1995 |
|
RU2168562C2 |
| DE 1591720 B2, 10.07.75 | |||
| DE 3227486 A1, 26.01.84 | |||
| US 3631491, 28.12.71 | |||
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОМЕСТНОЙ КООРДИНАТЫ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 1992 |
|
RU2073879C1 |

