Изобретение относится к области автоматики и может быть применено при управлении динамическими объектами с одним входом и одним выходом.
Наиболее близкой к изобретению по совокупности признаков (прототип) является адаптивная система управления с переменной структурой [1], содержащая задатчик, выходом подключенный к входам эталонной модели, первому блоку релейных элементов и сигнальному входу первого масштабирующего усилителя с переменным коэффициентом, измеритель рассогласования, первым входом подключенный к выходу эталонной модели, вторым входом связанный с выходом объекта управления, входом второго блока релейных элементов и сигнальным входом второго масштабирующего усилителя с переменным коэффициентом, а выходом - со входами блока формирования коэффициентов усиления, третьего блока релейных элементов и управляющим входом третьего масштабирующего усилителя с переменным коэффициентом, четвертый блок релейных элементов, вход которого подключен к выходу блока формирования коэффициентов усиления, а выход - к первым входам первого - четвертого блоков умножителей, вторые входы которых подключены соответственно к выходам первого второго, третьего и пятого блоков релейных элементов, выходы первого - четвертого блоков умножителей связаны соответственно с управляющими входами первого - четвертого масштабирующих усилителей с переменным коэффициентом, выходы которых подключены соответственно к первому - четвертому входам сумматора, выход сумматора связан с входом объекта управления и формирующим фильтром, соединенным с входом пятого блока релейных элементов и сигнальным входом четвертого масштабирующего усилителя с переменным коэффициентом.
Однако в этой системе привод (рулевые поверхности) совершает(ют) колебания с достаточно большой амплитудой и частотой, что не может считаться удовлетворительным с точки зрения затрат на управление. Кроме того, это может сказаться на безопасности (например, пролетов), на сохранении механической части привода.
Цель изобретения - повышение надежности, безопасности и ресурса системы за счет уменьшения частоты и амплитуды колебаний привода путем разделения сигнала управления, поступающего на привод, на низкочастотный и высокочастотный.
Эта цель достигается введением в адаптивную систему управления с переменной структурой блока фильтрации, первым входом соединенного с выходом сумматора, вторым входом связанного с выходом измерителя рассогласования, а выходом - со входом объекта управления.
Блок-схема адаптивной системы управления (фиг.1) содержит задатчик 1 входного сигнала, эталонную модель 2, формирующий фильтр 3, измеритель 4 рассогласования, блок 5 формирования коэффициентов усиления, первый 6, второй 7, третий 8, четвертый 9 и пятый 10 блоки релейных элементов, первый 11, второй 12, третий 13 и четвертый 14 блоки умножителей, первый 15, второй 16, третий 17 и четвертый 18 масштабирующие усилители с переменным коэффициентом, сумматор 19, блок фильтрации 20 и объект управления 21.
Известен один из возможных принципов построения адаптивной системы управления для линейного объекта
основанный на использовании эталонной модели (ЭМ)
где x, xм, u, uз - векторы состояния ОУ (n • 1), ЭМ (n • 1), управления (k=1) и задающих воздействий (m • 1) соответственно;
A, Aм, B, Bм - матрицы соответствующих размерностей.
Управление выбирается так, чтобы ошибка e=xм-x была сведена к нулю. Для решения этой задачи используется уравнение движения относительно ошибки, получаемое из уравнений (1) и (2), т.е.

Для обеспечения устойчивого скользящего режима по пересечению плоскостей скольжения
S = Cтe, (4)
где C - матрица (n • k);
S - вектор (k • 1),
уравнение определяется из системы неравенств таким образом, чтобы условия существования устойчивого скользящего режима выполнялись во всем диапазоне изменения параметров объекта управления (ОУ).
Если выполнены следующие условия:
1) пара матриц  управляема; (5)
управляема; (5)
2) det (CтB)≠0;
3) rank B=rank[B][Bм]=rank[B][D], (6)
то движение в скользящем режиме описывается уравнением
т. е. не зависит ни от коэффициентов матрицы A, ни от задающего воздействия uз. Однако необходимость выполнения условий (6) является серьезным препятствием при создании подобных адаптивных систем. Кроме того, вектор x должен быть непосредственно наблюдаем, иначе необходимо дополнительно синтезировать устройство оценивания вектора состояния, что требует решения задачи текущей идентификации. Отмеченные трудности легко преодолеваются, если при синтезе использовать неминимальную форму (НМФ) модели ОУ.
Пусть динамические свойства линейного стационарного объекта управления с одним входом и одним выходом Z описываются передаточной функцией
в которой нет сокращаемых нулей и полюсов.
Разделим числитель и знаменатель функции (1) на устойчивый полином
β(p) = pn-1+βn-2pn-2+...+β1p+βo
и результат запишем в виде
где ai, bi - коэффициенты, полученные при делении полиномов A(p) и B(p) на полином β(p).
Введем новые переменные:

С учетом проведенных преобразований уравнения ОУ (1) в пространстве состояний запишутся так: (10)
(10)
Порядок полученной модели равен (2n - 1) > n, поэтому она называется неминимальной.
Запишем уравнения ОУ (10) и ЭМ в следующем виде:
где xт=[Z Yn-2 Yn-3...Yo];
x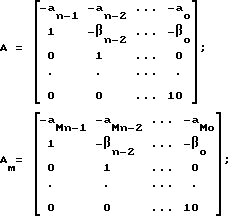

f - вектор, полученный из решения уравнения
где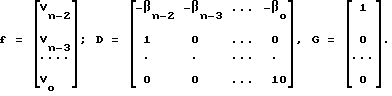
Введя для ЭМ (12) переменные в виде (9), получим ее передаточную функцию
Таким образом, форма (11) ЭМ позволяет задавать желаемую передаточную функцию, у которой порядок полинома числителя на единицу меньше порядка полинома знаменателя и все корни полинома числителя лежат слева от мнимой оси на комплексной плоскости. Последние условие связано с необходимостью обеспечения устойчивости модели, так как полином β(p), используемый при ее формировании, совпадает до постоянного множителя с числителем ЭМ.
Для получения уравнения движения относительно ошибки вычтем из уравнения (12) уравнение (11) и после преобразования получим

Нетрудно убедиться, что при выбранной структуре модели ОУ условия (6) выполняются
Если в уравнении (4) принять
Cт=[1 Cn-2 Cn-3 ... Co], (15)
то после преобразования уравнения движения в скользящем режиме (7) принимают вид

Таким образом, движение в скользящем режиме не зависит ни от параметров ОУ (11): коэффициентов матриц A, B, D, ни от задающего воздействия uз, а целиком определяется заданием параметров плоскости скольжения и числителя ЭМ.
Для обеспечения устойчивости режима скольжения уравнение должно быть выбрано так, чтобы выполнялось условие 
Закон управления будем искать в виде
u = Ψ
где элементы векторов Ψe, Ψx, Ψf и скаляр Ψu определяются по формулам


i = 1, 2, ..., n;
j = 1, 2, ..., (n-1).
Найдем произведение SS с учетом уравнений (4), (14), (17)
где Ai, Ami, Di - столбцы матриц A, Am, D;
ei, xi, fi - элементы векторов e, x, f соответственно.
Условие устойчивого скользящего режима SS<0 будет выполняться, если коэффициенты закона управления (17) выбрать из условий:

 (18)
(18)
В процессе функционирования ОУ изменяются коэффициенты матриц A, B, D. Однако границы их изменения известны и параметры закона управления (17) можно выбрать так, чтобы неравенства (18) соблюдались для всех режимов работы. В этом случае замкнутая система управления (11), (17) в скользящем режиме будет адаптивной, т.е. инвариантной к изменению характеристик ОУ и задающего воздействия.
Необходимо также оценить характер изменения вектора f в уравнении (13) при управлении (17), так как при f ---> ∞ управление Uэкв, определяемое из уравнения  С учетом формул (4), (14), и (15) запишем
С учетом формул (4), (14), и (15) запишем
Определим из этого уравнения
Uэкв=(CтB)-1Cт[Df - Aмe + (Aм-A)x + Bмuз]
и, подставив его в уравнение (13), получим
или после преобразований с учетом формул (11), (13) и (15)
где
Так как в соответствии с (16) e ---> 0, ЭМ (12) выбирается устойчивой и значение uз ограничено по величине, то и значения компонент вектора x ---> xм также ограничены. В этом случае значения компонент вектора f ограничены только тогда, когда матрица R - гурвицева. Это значит, что корни числителя передаточной функции (8) ОУ должны располагаться слева от мнимой оси комплексной плоскости.
Рассмотрим эффективность предложенной методики на примере синтеза адаптивной системы управления гипотетического самолета с эталонной моделью в продольной плоскости. Уравнения короткопериодического движения самолета и ЭМ в этом случае имеют вид
где α, αм - угол атаки;
ωz, ωzм - угловая скорость тангажа самолета и ЭМ;
δв - отклонение руля высоты самолета;
uз - задающее воздействие.
Коэффициенты уравнений (19) для двух режимов полета представлены в табл. 1.
При исследовании эффективности адаптивной системы будем полагать, что
1) δвз= sint + 1/3sin3t + 1/5sin5t + 1/7sin7t;
2) в качестве цели синтеза адаптивной будем считать выполнение условия 
3) привод руля высоты будем описывать дефференциальным уравнением δв= -1/Tδв+1/TU, где T - постоянная времени привода, U - управляющий сигнал.
Из уравнений (19), (20) определяем передаточные функции (ПФ) самолета и ЭМ
На этапе синтеза будем полагать привод руля высоты безинерционным: δв= U. Полином β(p) принимаем равным числителю Wм(p) β(p) = p+1, а вектор Cе=[1 0]. При сделанных допущениях уравнения (11)-(13) принимают вид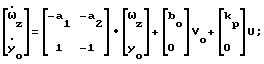
V0=-V0+U;
Коэффициенты уравнений (21) для рассматриваемых режимов приведены а табл.2.
Неравенства (18) запишутся так:
для режима N1:
2) для режима N2: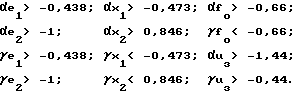
Выбираем коэффициенты закона управления (17), удовлетворяющие этим неравенствам:
При включении синтезированной системы процессы ωz (t) и ωzм (t) для режима N1 и режима N2 практически не отличаются, что и было показано в прототипе. Однако в предложенной системе рулевые поверхности совершают колебания с достаточно большой амплитудой и частотой, что является неудовлетворительным с точки зрения энергетических затрат на управление. Кроме этого, это может сказаться на безопасности полетов, на сохранении механической части привода. Результаты моделирования синтезированной системы для режима N1 при различных значениях постоянной времени привода представлены на фиг.2.
Для сглаживания этих колебаний можно разделить сигнал управления, поступающий на привод, на низкочастотный и высокочастотный. Схема двухканального управления показана на фиг.3. Постоянная времени T=0,01 и T=2 определена исходя из условия сохранения режима скольжения. Включение высокочастотного канала осуществляется при e ≤ 0,02.
В качестве технической реализации двухканального управления могут быть предложены фильтры в виде четырехрполюсников [2]. Включение высокочастотного канала может происходить с помощью компаратора [3], на один из входов которого подается опорное напряжение, соответствующее значению 0,02, а на второй вход - соответственно сигнал рассогласования e. В момент равенства этих значений на выходе компаратора появляется выходной сигнал, включающий, например, реле, которое своими контактами подключает высокочастотный канал.
Адаптивная система управления работает следующим образом.
Задающее воздействие uз с выхода задатчика 1 поступает на вход эталонной модели 2, выход которой xм связан с первым входом измерителя 4 рассогласования. На второй вход измерителя 4 рассогласования поступает сигнал  с выхода объекта 21 управления. На выходе измерителя 4 формируется сигнал рассогласования
с выхода объекта 21 управления. На выходе измерителя 4 формируется сигнал рассогласования  который поступает на первый вход блока 15, вход блока 7, блока 5 и первый вход блока 20.
который поступает на первый вход блока 15, вход блока 7, блока 5 и первый вход блока 20.
Усилитель 15 формирует сигнал управления  путем изменения коэффициента передачи канала управления по величине и знаку согласно следующему закону:
путем изменения коэффициента передачи канала управления по величине и знаку согласно следующему закону:
где  - сигнал рассогласования измерителя 5;
- сигнал рассогласования измерителя 5;
S - сигнал переключения,
αe и γe - переменные коэффициенты усилителя 15, формирующего сигнал управления.
Знаки сигнала рассогласования  и сигнала переключения S определяются с помощью блоков 7 и 6. Сравнение знаков (т.е. определения знака логического произведения
и сигнала переключения S определяются с помощью блоков 7 и 6. Сравнение знаков (т.е. определения знака логического произведения  сигнала рассогласования e и сигнала переключения S осуществляется в множителе 11, выходной сигнал которого управляет работой усилителя 15.
сигнала рассогласования e и сигнала переключения S осуществляется в множителе 11, выходной сигнал которого управляет работой усилителя 15.
Задающее воздействие uз с выхода задатчика 1 поступает также на первый вход усилителя 16 и вход блока 8. Усилитель 16 формирует сигнал управления  по следующему закону:
по следующему закону:
где uз - задающее воздействие задатчика 1;
S - сигнал переключения;
αuз и γuз - переменные коэффициенты усилителя 16.
Знак uз определяется с помощью блока 8. Сравнение знаков задающего воздействия uз и сигнала переключения S осуществляется в множителе 12, выходной сигнал которого управляет работой усилителя 16.
Выходной сигнал  поступает также на первый вход усилителя 17 и вход блока 9. Усилитель 17 формирует сигнал управления
поступает также на первый вход усилителя 17 и вход блока 9. Усилитель 17 формирует сигнал управления  по следующему закону:
по следующему закону:
где S - сигнал переключения;,
αx и γx - переменные коэффициенты усилителя 17.
Знак uз определяется с помощью блока 9. Сравнение знаков задающего воздействия uз и сигнала переключения S осуществляется в множителе 13, выходной сигнал которого управляет работой усилителя 17.
И, наконец, сигнал управления U с выхода сумматора 19 поступает на второй вход блока фильтрации и, пройдя через формирующий фильтр 3, имеющий передаточную функцию для объекта второго порядка
поступает на первый вход усилителя 18 и вход блока 10. Усилитель 18 формирует сигнал управления  по следующему закону:
по следующему закону:
где f - выходной сигнал формирующего фильтра 3;
S - сигнал переключения,
αf и γf - переменные коэффициенты усилителя 18.
Знак выходного сигнала формирующего фильтра 3 определяется с помощью блока 10. Сравнение знаков выходного сигнала переключения S осуществляется в множителе 14, выходной сигнал которого управляет работой усилителя 18.
Литература
1. Авторское свидетельство СССР 1659980 A1, 30.06.91.
2. Макаров И.М.. Менский Б.М. Линейные автоматические системы.-М.: Машиностроение, 1977, с. 441-452.
3. Нестеренко Б.К. Интегральные операционные усилители.-М.: Энергоиздат, 1982, с. 76-82.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2130635C1 |
| Адаптивная система управления с переменной структурой | 1988 |
|
SU1659980A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ КАЧЕСТВА ПИЛОТИРОВАНИЯ САМОЛЕТА ЛЕТЧИКОМ | 1998 |
|
RU2136046C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ РАДИОЛОКАЦИОННОЙ СТАНЦИИ БОКОВОГО ОБЗОРА | 1998 |
|
RU2124738C1 |
| ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ В ГИДРОДИНАМИЧЕСКОЙ ТРУБЕ | 1998 |
|
RU2130176C1 |
| ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ | 1998 |
|
RU2132107C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ПОМЕХ | 1998 |
|
RU2132592C1 |
| КОРОТКОВОЛНОВАЯ МОДУЛЬНАЯ БУКСИРУЕМАЯ НЕЖЕСТКАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 1998 |
|
RU2134469C1 |
| ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ В ГИДРОДИНАМИЧЕСКОЙ ТРУБЕ ТЕРМОСОПРОТИВЛЕНИЯМИ | 1998 |
|
RU2133022C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ ПУЛЬСА | 1994 |
|
RU2118119C1 |




Изобретение относится к области автоматики и может быть применено при управлении динамическими объектами с одним входом и одним выходом. Технический результат изобретения заключается в повышении надежности, безопасности и ресурса системы за счет уменьшения частоты и амплитуды колебаний привода путем разделения сигнала управления, поступающего на привод, на низко- и высокочастотный. При этом условие сохранения скользящего режима не нарушается. Система содержит задатчик входного сигнала, эталонную модель, формирующий фильтр, измеритель рассогласования, блок формирования коэффициентов усиления, пять блоков релейных элементов, четыре блока умножителей, четыре масштабирующих усилителя с переменным коэффициентом, сумматор, блок фильтрации, объект управления. 3 ил., 2 табл.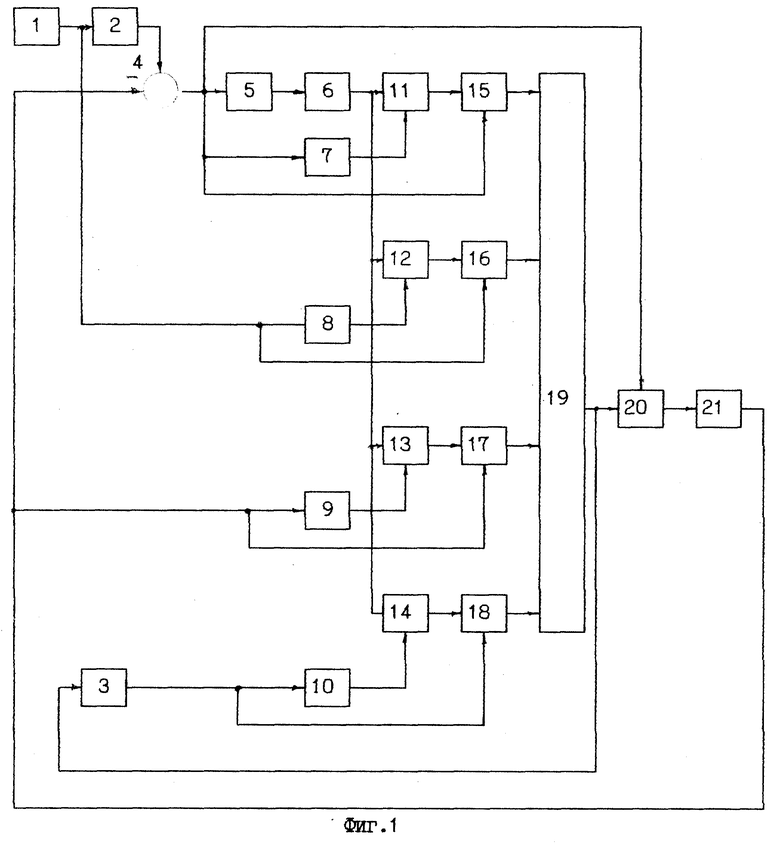
Адаптивная система управления с переменной структурой, содержащая задатчик, выходом подключенный к входам эталонной модели, третьему блоку релейных элементов и сигнальному входу второго масштабирующего усилителя с переменным коэффициентом, измеритель рассогласования, первым входом подключенный к выходу эталонной модели, вторым входом связанный с выходом объекта управления, входом четвертого блока релейных элементов и сигнальным входом третьего масштабирующего усилителя с переменным коэффициентом, а выходом - с входами формирования коэффициентов усиления, второго блока релейных элементов и сигнальным входом первого масштабирующего усилителя с переменным коэффициентом, первый блок релейных элементов, вход которого подключен к выходу блока формирования коэффициентов усиления, а выход - к первым входам первого - четвертого блоков умножителей, вторые входы которых подключены соответственно к выходам второго - пятого блоков релейных элементов, выходы первого - четвертого блоков умножителей связаны соответственно с управляющими входами первого - четвертого масштабирующих усилителей с переменным коэффициентом, выходы которых подключены соответственно к первому - четвертому входам сумматора, выход сумматора связан
с входом формирующего фильтра, выход которого соединен с входом пятого блока релейных элементов и сигнальным входом четвертого масштабирующего усилителя с переменным коэффициентом, отличающаяся тем, что дополнительно введен блок фильтрации, первым входом соединенный с выходом сумматора, вторым входом - с выходом измерителя рассогласования, а выходом - с входом объекта управления.
| Адаптивная система управления с переменной структурой | 1988 |
|
SU1659980A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| Макаров И.М., Менский Б.М., Линейные автоматические системы | |||
| - М.: Машиностроение, 1977, с.441-452. | |||
