Изобретение относится к системам управления, а именно к системам управления нестационарным объектом с эталонной моделью, синтезированной на основе второго метода Ляпунова.
Цель изобретения - повышение точности системы управления нестационарным объектом.
Эта цель достигается тем, что самонастраивающаяся система управления с эталонной моделью дополнительно содержит матричный усилитель, сумматор, пять дифференциаторов, два блока возведения в степень и два умножителя.
Рассмотрим нестационарный объект управления для простоты и первого порядка, но не теряя в общности:
(р -a(t) р + b(t)gi
0)
где k(x) и nr)(t) - переменные параметры, настраиваемые при помощи блока настройки,
g(t) - входной сигнал.
Из (1) и (2) запишем уравнение системы управления
(t) + k(t)b(t) p+b(t)m(t)g. (3) Выберем уравнение эталонном модели
л
(р р м + bg(4)
где a, b const О
р м(т.) - выходной сигнал модели. Обозначим
И
00
го -ч о
f-a(t) + k(t)b(t) + a Д k(t) b(t)m(t) - b - A m(t)
(5)

| название | год | авторы | номер документа |
|---|---|---|---|
| Система адаптивного управления | 1991 |
|
SU1807446A1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU1023281A2 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| Адаптивная система управления | 1991 |
|
SU1807447A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2010 |
|
RU2445671C2 |
Изобретение относится к системам управления. Цель изобретения - повышение точности системы -достигается тем, что система дополнительно содержит два блока возведения в степень, последовательно соединенные первый дифференциатор, третий блок умножения и второй дифференциатор, четвертый блок умножения и четвертый дифференциатор и последовательно соединенные пятый дифференциатор и третий сумматор. 1 ил.
где (f (t) - выход объекта управления, g1(t) - управление,
a(t), b(t) - переменные коэффициенты.
А управление представим в виде
gi(t)k(t) p+m(t)g,
(2)
Тогда с учетом (5) из (3) и (4) запишем
aef
уравнение для ошибки Ј - р (t) - f M(t): Ј -а е + A k(t) p + A m(t)g (6)
31827664 А
Обозначим2rH dfed) V
ДгптрМедГ11 egdt.
в - A k(t) (p + Д m(t)g a s + e (7)to
.пс где е a Ј + k
Выберем функцию Ляпунова5 д д и д .
v - 0 5(e2 + ктр2 + A mTp2),(8) AmH(t), а значение настраиваемых параvv . . метров регулятора представим в виде
где AktP{t) и A mTp(t) - требуемые значе-(д irfrt - |сЫ - A Ut)
ния текущих параметрических отклонений,1и А V. л А , Ak(t) и A m(t) соответственно, и запишемСА mw А
производную функцию Ляпунова05)
л j. л 2 л1 .1. л т Am /тЕсли записать значения AkH(t) и
v ее + Дкто AKTD+ Дттр Дттр () ,
н vм и v 5 A mM(t) через их текущие значения
Значение производной е найдем из (7)Л . м , м л (. -.
в следующем виде J« ,|f S((I)
е - Ak,P « + Д k,p p + Д Л,Р0 Д+ nhpg и с (,5) (,6) и (5) запишем при ( Д
/ммпорциональном законе в контуре адаптации
С учетом (10) запишем производнуюfaW + А ЙЬ 1® A k(t)b(t) - а + A k(t),
v -e( AkTp Aktp +А rfhpa-f А 25 (b(tXm(t)- Я ) Am(t) b+ Д m(t}
mTpg) + Akrp AkTp+ A mTp Аттр 0У
vvvv v В разомкнутом контуре адаптации ошибки
гл .чAk(t) и Д m(t) можно записать в виде
Если теперь положить значение 0 в виде 30 b(t) + k (b)b(t) + а - A k(t) - vI b{t}m(t0) - b Am(t),
t(18)
v « -0,5(e pfn + (eg)2 + AkTp J A ktpdt+ а в замкнутом из (17) получим для Д k3(t) и
«оAm3(t)
tv
+ AmTp / AmTpdt (12)
to
тщтт
n 1,2
Ak3(t)
Ak(t)
.- Am(t)
то необходимо, чтобы выполнялись равен.- Am(t)
40
ГД Д -AkTpee,(19)
/ Д гптоД Anhpeg,В случае пропорционально-дифференf t циально-интегрального закона в контуре
J AkTp /fikrpdt - Д krpee,адаптации при изменении входного сигнала
to45 g(t) и параметров объекта управления a(t) и
А V . дд b(t) в последнем будут как статическая, так
ДттрПттрЛ-- А ттред.и Динамическая ошибка, поэтому можно
е k --fe ep)2t 1сформулировать следующее утверждение:
еа Дт ТР ЧеагпРассмотренная адаптивная системе упV .п 50 равления будет устойчива, если отклонения
параметров Дка(0и Д m3(t) будут таковы, И9 (13) немедленно получим алгоритмы что система с параметрами
параметровi . .
i-a+ Ak3(t) a3(t).
( .. ,55 |ь+ Am3(t)b3(t)
Д kTp - -{е у))201 - Я- / (е p}di (14)(20)
обудет удовлетворять условиям устойчивости
Раусса - Гурвица.
Таким образом, алгоритмы (14) позволяют
тщтт
Ak3(t)
Ak(t)
.- Am(t)
-обеспечить в контуре адаптации параметров,
-сиять ограничения на скорость изменения параметров объекта управления.
О сказанном свидетельствует производная функция Ляпунова (12), которая непосредственно показывает сходимость алгоритмов (14) как по сигнальному рассогласованию, так и по параметрическим.
Синтез алгоритмов (14) проведен для случая, когда подстраиваются как нули (t), так и полюса (2, 3).
Кроме того, при синтезе алгоритмов (14) не требуется решать систему уравнений для определения составляющих матрицы Р (2, 3), что существенно упрощает синтез,
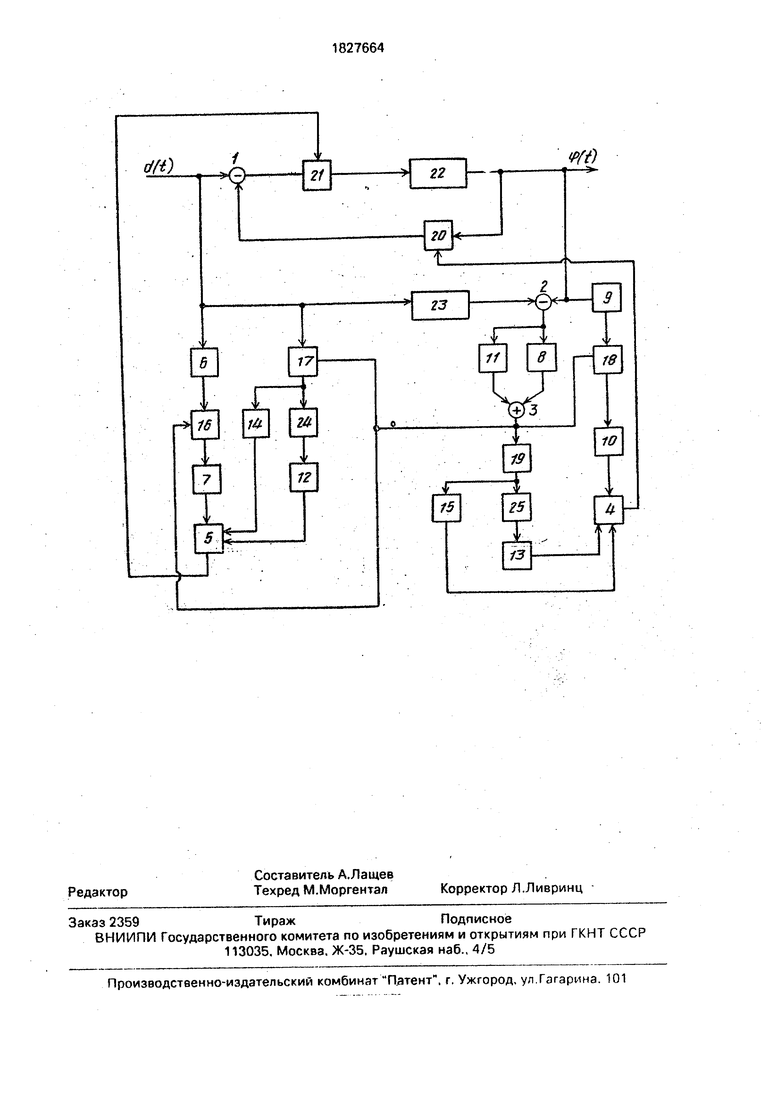
На чертеже представлена функциональная схема системы управления, где приняты следующие обозначения: блоки сравнения 1,2, сумматоры 3,4,5, дифференциаторы 6. 7, 8, 9, 10, усилители 11, 12,13, интеграторы 14,15, блоки умножения 16,1 18,19, блоки с переменным коэффициентом усиления 20, 21, нестационарный объект управления 22, эталонная модель 23, блоки 24 и 25 возведения в степень.
Система работает следующим образом.
Входной сигнал g(t) поступает на вход блока 1 сравнения, на второй вход которого через блок 20 с переменным коэффициентом усиления поступает выходной сигнал р($ объекта управления. Сигнал ошибки управления с выхода блока 1 сравнения через блок 21 с переменным коэффициентом усиления в качестве управления поступает на вход объекта 22 управления.
Сигнал g(t) поступает также на через эталонную модель 23 системы на вычитающий вход блока 2 сравнений, где сравнивается с выходным сигналом объекта р (т.).
Сигнал невязки с выхода блока сравнения 2 Ј (t) служит для формирования сигналов настройки параметров k(t) и m(t). Смысл установки блоков функциональной схемы 8, 9, 10, 11, 3, 4, 13. 15, 18. 19 и 25 ясен из алгоритма адаптации параметров - первое уравнение системы уравнений (14), а второе уравнение этой системы реализуют блоки 5, 6, 7, 12, 14, 16, 17, 24 и связи между ними.
С выходов сумматоров на входы настройки соответственно Д тн(0 поступают на входы настройки соответственно блоков
20и 21 с переменным коэффициентом усиления. Коэффициенты усиления блоков 20 и
21настраиваются таким образом, чтобы скомпенсировать параметрические отклонения Дк(т.) и Д m(t), которые будут равны нулю, когда е О
Формула изобретения
Самонастраивающаяся система управления с эталонной моделью, содержащая 5 эталонную модель, выход которой соединен с входом системы и первым входом первого блока умножения, выход которого соединен с входом первого интегратора, выход первого блока с переменным коэффициентом уси10 ления подключен к первому входу первого блока сравнения,объект управления, выход которого является выходом системы, второй блок сравнения, подключенный первым входом ic выходу эталонной модели, второй
5 блок умножения, подключенный выходом к входу второго интегратора, два усилителя и второй блок с переменным коэффициентом усиления, отличающаяся тем, что, в нее введены пять дифференциаторов, три
0 сумматора, два блока возведения в степень, третий и четвертый блоки умножения м третий усилитель, вход системы соединен с входом первого дифференциатора и вторым входом пеоеого блока сравнения, подклю5 ценного выходом через второй блок с переменным коэффициентом усиления к входу объекта управление, выход которого соединен с первым входом второго блока умножения, информационным входом первого
0 блока с переменным коэффициентом усиления, входом второго дифференциатора и вторым входом второго блока сравнения, выход которого через третий усилитель и третий дифференциатор подключен соот5 ветствеьно к первому и второму входам первого сумматора, выходы первого и второго дифференциаторов подключены к первым входам соответственно третьего и четвертого блоков умножения, вторые входы кото0 рых подключены к выходу первого сумматора и вторым входам первого и второго блоков умножения, подключенных выходами через первый и второй блоки возведения в степень к входам соответст5 веино первого и второго усилителей, выходы третьего и четвертого блоков умножения подключены к входам соответственно четвертого и пятого дифференциаторов, выходы которых соединены с первыми входами
0 соответственно второго и третьего сумматоров, подключенных выходами к управляющим входам соответственно второго и первого блоков с переменным коэффициентом усиление, второй и третий входы второ5 го сумматора подключены к выходам первого усилителя и первого интегратора соответственно, второй и третий входь- третьего сумматора подключены к выходам второго усилителя и второго интегратора соответственно.
| Борцов Ю.А., Поляков Н.Д | |||
| Путов В.В | |||
| Электро-механические системы с адаптивным и модальным управлением | |||
| Л.: Энерго- атомиздат, 1984, с | |||
| Счетный сектор | 1919 |
|
SU107A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
