Изобретение может быть использовано при устройстве аэродромов, преимущественно для взлета и посадки самолетов, действующих группой, например, истребителей.
Ближайшим аналогом изобретения являются "Способ и устройство для приземления самолетов", описанные в заявке N 95108464, публ. 27.04.97.
Основным недостатком известного способа и устройства является то, что число одновременно взлетающих самолетов ограничено шириной взлетной полосы, продолжительность барражирования - запасом топлива, а посадки - временем, необходимым для освобождения полосы ранее приземлившихся самолетов.
Целью изобретения является обеспечение совместного взлета или приземления группы самолетов на одну взлетно-посадочную полосу, а также осуществление барражирования аэродрома без расходования запаса их топлива.
Сущность изобретения состоит в том, что взлетно-посадочная полоса имеет возможность двигаться со скоростями взлета безмоторного полета на буксире или посадки на нее самолетов. Самолеты крепятся и буксируются при взлете и барражировании, приводятся и притягиваются к платформам при посадке при помощи гибких связей различного назначения.
Для этого в способе взлета, барражирования и посадки самолетов, включающем разгон самолета по взлетно-посадочной полосе с помощью самоходной платформы до скорости отрыва от земли, буксировку в воздухе, полет вокруг аэродрома и последующее приземление, разгон самолета осуществляют по замкнутой криволинейной траектории, после отрыва от земли его буксируют с постепенно увеличивающимся до требуемой величины радиусом, а посадку осуществляют в обратном порядке. Буксировку самолета осуществляют при неработающих двигателях. Перед посадкой самолет перемещают вокруг взлетно-посадочной полосы, уравнивают его скорость со скоростью платформы, после соединения самолета с платформой снижают самолет по спиралевидной глиссаде до зависания над платформой, при этом уравнивают угловую скорость самолета с угловой скоростью платформы.
В устройстве для взлета и посадки самолета, содержащем платформу, выполненную в виде ходовой тележки, установленной на рельсовые направляющие, причем тележка снабжена собственными двигателями, устройствами для приведения самолета, выполненными в виде гибкой связи и устройствами для крепления самолета к платформе, которые сопряжены с бортовым оборудованием самолета, рельсовые направляющие замкнуты, устройство для крепления самолета к платформе снабжено буксирным механизмом с тросом регулируемой длины, а самолет снабжен приборами для управления полетом при буксировке за платформой. При этом рельсовые направляющие замкнуты в кольцо, а платформы соединены в поезд. Длина поезда равна длине направляющих. Устройство приведения выполнено с возможностью слежения за полетом средства доставки гибкой связи от самолета к платформе и получения сигналов, отличающихся друг от друга, но согласованных с приемными устройствами самолета. Платформа содержит сдвигающиеся створки с пневматическими подушками для образования площадки приземления перед началом притягивания самолета. Узел буксирного устройства на самолете выполнен с каналом для направления троса и снабжен датчиками натяжения и отклонения троса от заданного относительно платформы положения, которые связаны с системой управления полетом, а датчик натяжения и отклонения троса связан с автопилотом.
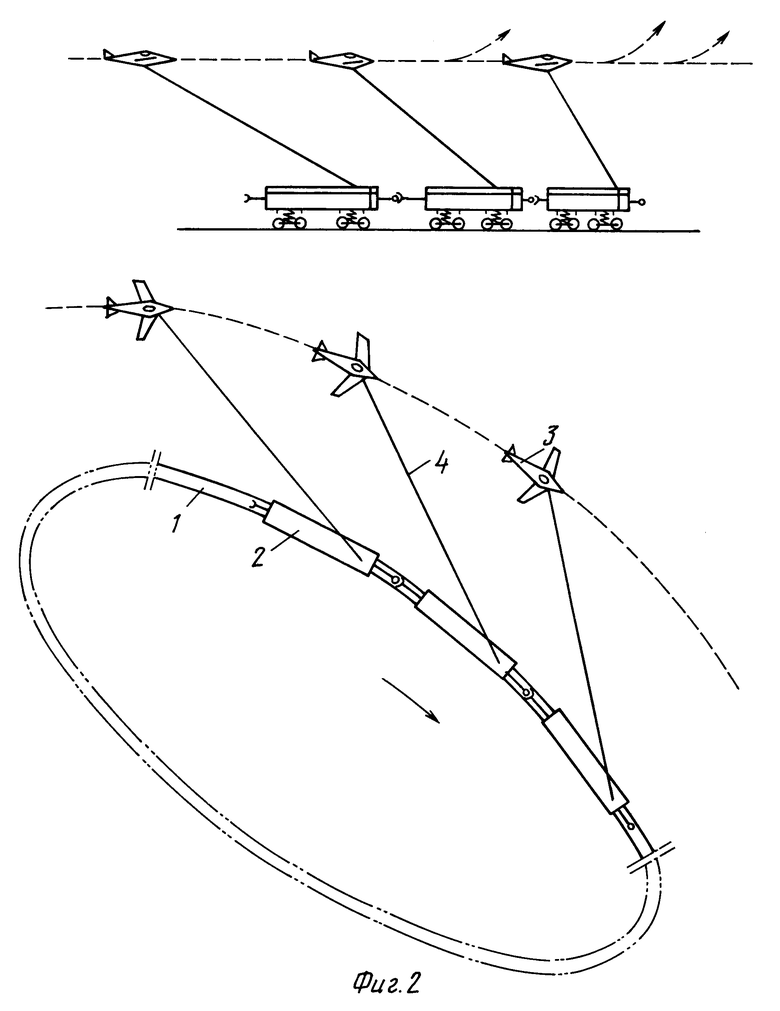
На фиг. 1 изображены этапы маневрирования группы самолетов при выходе 1, полете по круговой орбите и снижении II, зависании и приземлении на состав платформ III.
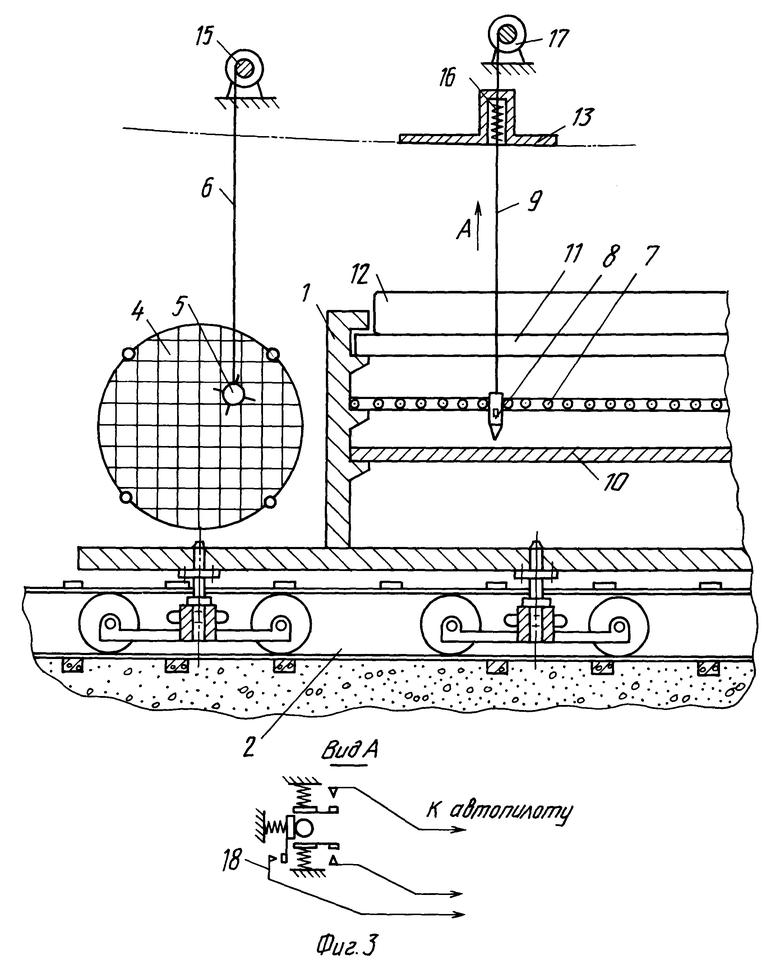
На фиг. 2 изображено положение самолетов при барражировании и групповом взлете.
На фиг. 3 изображено взаимодействие бортовых систем самолета и платформы.
Взлетно-посадочная полоса аэродрома образования самоходными платформами 1, установленными на направляющие 2 и соединенными в состав. Каждая из платформ снабжена следящим устройством приведения 3 с имитатором цели и улавливателем 4 для захвата самонаводящегося средства 5 с приводной гибкой связью 6 и ловителем 7 для захвата якоря 8 с буксирной гибкой связью 9, снабженным экраном 10. Ловитель 7 расположен под сдвигающимися створками 11, снабженными пневмоподушками 12. Каждый из группы самолетов 13 снабжен устройством 14 для запуска самонаводящегося средства 5 и лебедкой 15, на барабан которой намотана приводная гибкая связь 6, свободный конец которой соединен с самонаводящимся средством 5. На определенном расстоянии от устройства запуска 14 на самолете установлено устройство 16 для встреливания в ловитель 7 якоря 8. Устройство встреливания 16 снабжено лебедкой 17, на барабан которой намотана буксирная гибкая связь 9, и желобом, через которой она проходит, с датчиками натяжения и углов наклона 18 гибкой связи 9 относительно платформы 1.
Устройство для посадки и взлета самолетов функционирует двояко. В одном случае самолеты 13 осуществляют полет вокруг движущегося со скоростью приземления по направляющим 2 состава платформы 1. Полет выполняется в таком порядке, чтобы каждый из самолетов находился против платформы, на которую он должен приземлиться. Затем из устройства 14 в направлении устройства приведения 3 самолет запускает самонаводящееся средство 5, доставляющее свободный конец приводной гибкой связи к улавливателю 4, где он захватывается и закрепляется. При помощи лебедки 15 приводную связь 6 натягивают и поддерживают в натянутом состоянии в продолжении всего процесса приведения самолета к платформе. Используя ее, каждый самолет определяет свое положение относительно платформы и по спиралевидной глиссаде снижается, зависает над платформой и из устройства 16 выстреливает в ловитель 7 якорь 8. После соприкосновения с экраном 10 якорь 8 захватывается ловителем 7, и самолет при помощи лебедки 17 за буксирную гибкую связь 9 притягивается к платформе и закрепляется, в процессе притягивания самолета створки 11 с расположенными на них пневмоподушками 12 смыкаются, образуя грузовую площадку для приземления самолета, после чего весь состав платформы тормозится.
Во втором случае соединение самолета с платформами происходит на более раннем этапе, при их подходе к аэродрому. До соединения самолетов 13 с платформами 1 при помощи приводных гибких связей состав неподвижен. После соединения состав разгоняется до скорости приземления самолетов, за время разгона идущая на посадку группа самолета перестраивается в синхронный полет по кольцевой траектории вокруг состава платформ. Далее устройства самолетов и платформ взаимодействуют как и в предыдущем случае посадки.
Перед взлетом самолеты 13 устанавливаются на платформы 1 и с помощью якоря 8 и буксирной гибкой связи 9 соединяются с ней. При помощи лебедки 17 буксирная связь 9 натягивается и буксирует самолет на платформе. Затем состав платформ по замкнутым в кольцо направляющим разгоняется до скорости, не меньшей скорости взлета самолетов. По окончании разгона лебедку 17 расстопоривают и, подтормаживая, разматывают буксирную связь 9. Поднимаемый встречным потоком воздуха самолет, маневрируя, занимает в воздухе такое положение, при котором буксирная связь, проходя через желоб, занимает относительно расположенных в его стенках датчиков 18 такое положение, при котором самолет может, буксируясь, осуществлять барражирование на автопилоте, не включая двигатели, перед взлетом самолеты включают двигатели, разгоняются до скорости самостоятельного полета, обгоняя состав, высвобождают из ловителя 7 якорь 8 и, набирая высоту, втягивают его в самолет, наматывая буксирную связь 9 на барабан лебедки 17.
Изобретение относится к авиации, в частности к созданию взлетно-посадочных полос. Взлетно-посадочной полосе придается кольцеобразная форма. Она снабжена замкнутой направляющей рельсового типа. По рельсам движется состав платформ, на которых с помощью гибкой связи закрепляются самолеты. Взлет и снижение самолета осуществляют по спиралевидной траектории. Для этого самолеты снабжены гибкой связью с якорем, а платформы - механизмом для захвата якоря. Таким образом, появляется возможность запуска и посадки большого количества самолетов одновременно. 2 с. и 11 з.п.ф-лы, 3 ил.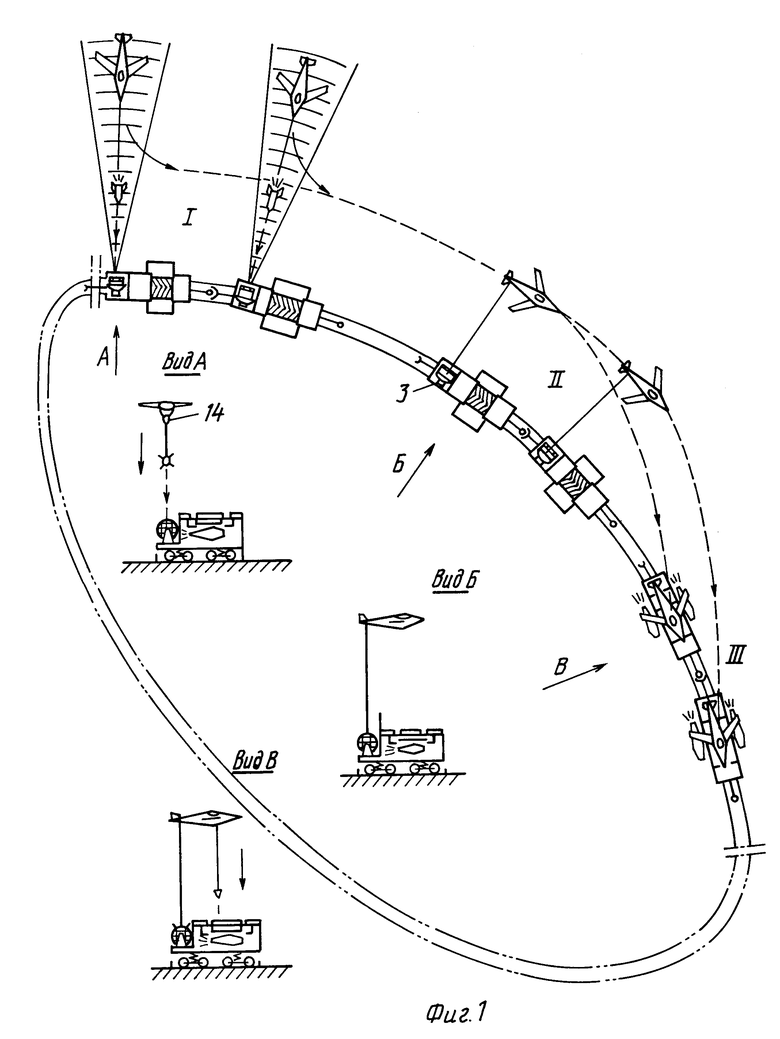
| RU, A1, 95108464, 22.04.87 | |||
| RU, C1, 2014249, 15.06.94 | |||
| US, A1, 4790487, 13.12.88 | |||
| US, A1, 2923504, 02.02.60 | |||
| RU, A1, 94036418, 10.09.96. |

