Изобретение относится к области авиации и может найти применение в качестве взлетно-посадочных полос (ВПП) при чрезвычайных ситуациях, в районах стихийных бедствий, локальных военных конфликтах, где ВПП выведены из строя и т.д.
Известен способ приземления самолета на платформу и устройство для его осуществления, патент РФ №2093429, B64F 1/00 от 10.20.1997. Способ приземления самолета на платформу, движущуюся в направлении посадки, заключается в снижении самолета, синхронном уменьшении его скорости и увеличении скорости платформы до посадочной скорости самолета в зоне их ближнего взаимодействия. Перед соприкосновением самолета и платформы осуществляют горизонтальный полет самолета над платформой на минимальной высоте с гарантированным зазором и скоростью, равной скорости платформы, производят касание их, сохраняя возможность взаимного перемещения, стабилизируют самолет по крену, курсу и тангажу.
Самоходная платформа с возможностью движения в направлении посадки со скоростью приземления самолета, снабженная тормозным устройством, содержит механизм приземления с устройством для захвата якоря с гибкой связью, соединенную с самолетом, и устройство фиксации самолета на платформе. Механизм приземления выполнен в виде транспортера с возможностью остановки гибкой связью после притягивания им самолета к грузовой посадочной площадке с экраном между его верхней и нижней ветвями и транспортирующими звеньями в виде зацепов для захвата якоря. Платформа оборудована направляющими и снабжена грузовой посадочной площадкой для приземления на нее самолета с амортизаторами, например пневматическими, под которыми расположен механизм приземления. Направляющие для движения платформы расположены по кромкам ВПП, а платформа снабжена предрессорной колесной опорой, расположенной под грузовой посадочной площадкой и направляющими для спуска самолета.
Однако в патенте рассматривается движущийся транспортер со скоростью, равной посадочной скорости самолета, что является технически трудновыполнимой задачей при посадочных скоростях современных маневренных самолетов Vпос=270÷300 км/ч.
Известен мобильный железнодорожный аэродромный комплекс, патент РФ №2121451, B64F 1/00, B61D 17/00, 1998 г. Аэродромный комплекс выполнен на базе железнодорожных вагонов грузового парка и железнодорожных станций (узлов). Железнодорожная платформа состоит из крайних откидных бортовых площадок, промежуточных откидных бортовых площадок, переездных площадок железнодорожных платформ, подвижно закрепленных площадок, опор-домкратов, запирающих устройств.
Аэродромный комплекс основан на ряде железнодорожных платформ размером 20×3 м грузоподъемностью 60 т. Платформа представляет собой рамную конструкцию, в основе которой находится хребтовая балка, две боковые продольные, две концевые, ряд промежуточных поперечных балок. Кузов платформы оборудован металлическим настилом. Для перемещения грузов из одного вагона в другой имеются торцевые переездные площадки, укрепленные шарнирно по краям рам кузова.
Железнодорожная платформа оснащена откидными бортовыми площадками с опорами-домкратами и гидравлическими или пневматическими устройствами, обеспечивающими плавность опускания площадок. При этом на торцевых сторонах откидных бортовых площадок имеются подвижно закрепленные площадки.
При сборке ВПП комплекса на парк путей (через путь) до выставленных в створе путевых упоров загоняют не менее двух составов железнодорожных модулей ВПП необходимой длины. Начиная от конца составов осуществляют последовательное развертывание железнодорожных модулей ВПП с использованием плавно опускающихся устройств. При этом в первую очередь производится опускание откидных бортовых площадок и их установка на опоры-домкраты. Последние выдвигают из откидных бортовых площадок и устанавливают на свободный рельс смежного пути, откидным бортовым площадкам задают требуемое вертикальное положение. Затем опускают переездные площадки железнодорожных платформ, перемещают в исходное (рабочее) положение подвижно закрепленные площадки. В завершение развертывания все откидные и подвижные элементы железнодорожных модулей ВПП взаимно скрепляются запорными устройствами. Данный комплекс наиболее близок к предлагаемому.
Однако данный комплекс не рассчитан на посадку или взлеты маневренных летательных аппаратов на линейных железнодорожных участках длиной ~1000 м.
Техническим результатом, на достижение которого направлено изобретение, является обеспечение взлета-посадки маневренных летательных аппаратов (ЛА) в условиях ограниченных участков железнодорожных путей и чрезвычайных ситуаций.
Существенные признаки
Железнодорожный аэродромный комплекс взлета-посадки летательных аппаратов, например, пилотируемых или беспилотных, содержащий силовые тяговые установки, например локомотивы, ряд связанных железнодорожных платформ - вагонов-модулей, выполненных со складными консолями, внешними и внутренними, опирающимися на поворотные балки жесткости, откидными складными вставками торцевого типа, закрепленными замками, закрывающими междувагонные проемы, образующими составы на рельсах смежных параллельных путей с единой жесткой полосой - взлетно-посадочной площадкой (ВПП), покрытой настилом, согласно изобретению ВПП размещена на сдвоенных железнодорожных составах, установленных на двух прямолинейных путях, ориентированных относительно «розы ветров», в виде равностороннего треугольника для ослабления боковой составляющей ветра, сцепленных с локомотивами для осуществления разгона со скоростью 100-120 км/ч перед и во время посадки и взлета маневренного ЛА.
Для осуществления взлета подвижная ВПП оборудована трамплином с углом установки α=3-5°, обеспечивающим начальный угол траекторного взлета ЛА. При этом длина разбега сокращена до 150-200 м для взлетающего на форсажном режиме работы двигателя ЛА.
Дополнительно установлены аэрофинишеры тросового типа с гидравлическими тормозными устройствами, ограничивающими взаимное перемещение ЛА и ВПП, рассеивающими кинетическую энергию приземляющегося ЛА до допустимой перегрузки для посадки снабженных тормозными гаками ЛА.
Кроме того, в комплекс введена бесплатформенная навигационная система со встроенным приемником GPS/Глонасс, включающая лазерные гироскопы и акселерометры, установленные по трем осям, соединенные с блоками интегрирования для диагностики перемещения платформ и контроля износа железнодорожных путей, и установленная с индикатором в кабине оператора.
В состав комплекса введены системы установленных по оси и по контуру сигнальных огней посадочной площадки, приводные радиомаяки и командный пункт, установленный на заднем крае ВПП.
Для пояснения изобретения на фиг.1 приведена структурно-функциональная схема железнодорожного аэродромного комплекса взлета-посадки ЛА, используемого оборудования, где изображены:
1 - летательный аппарат;
2 - взлетно-посадочная площадка на связанных платформах-вагонах-модулях;
3 - тросы аэрофинишера;
4 - устройства гашения энергии ЛА;
5 - система торможения платформ;
6 - трамплин съемного типа на конце взлетно-посадочной площадки;
7 - огни сигнальной системы;
8 - приводной радиомаяк;
9 - тяговые локомотивы;
10 - защищенный командный пункт (кабина) оператора;
11 - колесные пары;
12 - рельсы;
18 - отдельный вагон-модуль;
20 - платформа вагона-модуля.
На фиг.2 изображен вид спереди на связанные платформы взлетно-посадочной площадки (ВПП):
2 - взлетно-посадочная площадка на связанных платформах - вагонах-модулях;
11 - колесные пары;
12 - рельсы;
13 - откидные складные внешние и внутренние консоли вагона-модуля;
14, 15 - съемные балки жесткости;
16 - ограничительный бортик;
17 - сцепное устройство - замки;
20 - платформа вагона-модуля.
На фиг.3 изображены вид сверху на связанные платформы взлетно-посадочной площадки (ВПП) на сдвоенных железнодорожных составах, установленных на двух прямолинейных путях;
2 - взлетно-посадочная площадка на связанных платформах - вагонах-модулях;
13 - откидные складные внешние и внутренние консоли;
18 - отдельный вагон-модуль;
19 - головная пара тяговых вагонов (симметрично с обеих сторон ВПП).
Железнодорожный аэродромный комплекс взлета-посадки (КВП) маневренных ЛА содержит ряд связанных железнодорожных платформ 2, покрытых настилом, платформы 2 устанавливают в виде подвижной взлетно-посадочной площадки (ВПП) на колесных парах 11 на рельсах 12 смежных путей (см. фиг.1). Платформы 2 с тормозными системами 5 содержат откидные складные консоли внешние и внутренние 13 сцепленных устройств - промежуточные откидные площадки - складные консоли 13, запирающие устройства 17 (см. фиг.2). Сцепленные платформы 2 состыкованы с головной парой тяговых локомотивов 9. В составе КВП расположены аэрофинишеры 3, 4 тросового типа с гидравлическими тормозными устройствами 4 для гашения кинетической энергии ЛА при посадке. Для выполнения взлета ЛА КВП оборудован трамплином 6 с α=3-5°, установленным в передней части комплекса. Взлетно-посадочная площадка комплекса по центральной линии и по контуру обозначена посадочными сигнальными огнями 7, составляющими систему световой сигнализации. Приводные радиомаяки 8, командный пункт 10 и кабина оператора установлены на заднем крае ВПП КВП.
КВП работает следующим образом.
ВПП установленного габарита формируется в виде спаренного поезда на двух параллельных путях стандартной колеи таким образом, чтобы 7-8 пар вагонов образовывали единую жесткую и прочную полосу размером ~18×150 м, покрытую настилом для лучшего сцепления с колесами шасси ЛА (см. фиг.1 и 2).
У вагона-модуля имеются складные консоли 13, внешние и внутренние, опирающиеся на поворотные балки жесткости 14, 15. Межвагонные проемы закрываются откидными складными вставками торцевого типа, закрепленными зажимами 17. Для развертывания и уборки откидные складные консоли 13 снабжены электрогидравлическим приводом.
Для посадки ВПП оборудуется аэрофинишерами 3, 4 тросового типа: четыре тормозных троса с дистанцией по 12 м между тросами, см. фиг.1. Полеты выполняются маневренными летательными аппаратами, снабженными тормозными гаками. Роль тормозного устройства в данном случае выполняет сама подвижная ВПП как инертное тело конечной массы, воспринимающее и гасящее кинетическую энергию приземляющегося ЛА до допустимой перегрузки для посадки. Маневренный ЛА с посадочной массой 20 т, при скорости 70 м/с, после касания и торможения разгоняет платформу, движущуюся с начальной скоростью 2-2,5 м/с, до скорости 7-8 м/с. В момент торможения продольная перегрузка достигает значений nx =2.5-4 в зависимости от длины пробега по платформе после касания (Lпр=30-60 м).
Локомотивами разгоняют состав со скоростью 100-120 км/ч перед стартом маневренного ЛА для обеспечения при взлете с трамплина 6 на форсажном режиме работы двигателя ЛА при скорости отрыва Vотр=70-75 м/с. Маневренный ЛА на принятой дистанции должен иметь тяговооруженность Кт>0.8. Разгон ВПП осуществляется автономной силовой установкой - локомотивами 9 с таким расчетом, чтобы длина разбега сократилась до 150-200 м. Для этого потребная тяга силовой установки 9 с массой 500 т составляет 75-80 т ~15000 л.с.
ВПП в транспортном положении делится на отдельные вагоны-модули до места прибытия, время развертывания ВПП составляет 2-3 ч. Для обеспечения полетов по всей «розе ветров» рабочие дистанции путей располагаются в виде равностороннего треугольника с длиной стороны ~1500-2000 м, при этом общая площадь аэродрома составляет 130 га. Стоянки, площадки, строения и прочие сооружения размещаются внутри данного треугольника.
Для контроля износа железнодорожных путей и определения их уклонов в зависимости от расстояния в состав комплекса введена бесплатформенная инерциальная навигационная система (БИНС) с индикатором, установленная в кабине оператора 10. БИНС включает трехстепенные лазерные гироскопы и акселерометры, соединенные с блоками интегрирования, встроенный приемник GPS/Глонасс и установлена в кабине оператора.
Железнодорожные станции - промежуточные, участковые, сортировочные, грузовые, промышленные - имеют в своем составе парки путей с достаточно протяженными линейными участками 850-1250 м. Уклоны по продольному и поперечному профилю станций i<0,0025-0,02, что отвечает требованиям, предъявляемым к посадке на ВПП. Расстояние между осями путей на линейных участках парков нормированы и составляют 5,3 м. Площади парков путей на станциях оборудованы дренажными и водоотводными системами, обеспечивающими их всесезонную эксплуатацию.
При заходе на посадку команды, вырабатываемые вычислителем, передаются с командного пункта оператора 10 по линии передачи данных на ЛА 1, где они подаются на систему автоматического управления (САУ) полетом. Данные об отклонениях от траектории полета также передаются на ЛА на дисплей летчику, позволяя летчику контролировать систему. САУ поддерживает ЛА на заданной траектории полета по курсу и глиссаде планирования, в то время как автомат тяги обеспечивает требуемый угол атаки при заходе на посадку. Приблизительно за 12 с до приземления на ВПП САУ вырабатывает и передает на ЛА команды с учетом движения состава. Эти команды вводятся с интервалом 1-2 с и индицируются меткой на шкале индикатора на лобовом стекле для управления вертикальным положением ЛА таким образом, чтобы ЛА был «в фазе» с подвижной ВПП комплекса.
В последние секунды захода на посадку, обычно за 6-10 с до приземления, для проведения ЛА через спутную струю или область срыва потока за КВП могут использоваться дополнительные команды по тангажу с использованием измеренных САУ и системой посадки координат ЛА при прохождении через область спутной струи (срыва потока) КВП.
При заходе на посадку в директорном, позиционном управлении ЛА осуществляется по информации на дисплее в кабине летчика. Данные об ошибках передаются на ЛА 1 и воспроизводятся соответствующими индикаторами на приборной доске и на лобовом стекле. Летчик управляет ЛА 1, используя индикацию до тех пор, пока платформа ПП комплекса КВП не станет видимой. В этой точке на расстоянии 2-3 км летчик переходит к использованию визуальных посадочных средств. Когда ЛА 1 уже находится на глиссаде планирования и осевой линии ВПП, от летчика требуется только сделать незначительные поправки для выхода в створ ВПП при приземлении.
Оператор в кабине командного пункта 10 КВП при заходе на посадку наблюдает отклонения по азимуту и углу места на индикаторе контроля и подает речевые команды летчику. Отклонения курса и глиссады планирования от заданной траектории передаются на ЛА 1 по стандартной линии речевой связи.
Система посадки на ВПП предусматривает факторы безопасности, резервные подсистемы, подсистемы проверки вычислителя, мониторы и индикаторы положения ЛА 1. Все фазы заключительного этапа захода на посадку и посадки могут контролироваться одновременно как летчиком, так и оператором командного пункта 10 КВП.
Если ЛА 1, заходящий на посадку, превышает допустимые ограничения при управлении САУ посадкой, либо переключают систему на ручной режим, либо подают команду ухода на второй круг. Команда ухода на второй круг автоматически начинает подаваться за 5-10 с до приземления, если превышены ограничения при управлении.
В состав введены системы сигнальных огней посадочной площадки, установленных по оси и по контуру, приводные радиомаяки и командный пункт, установленный на заднем крае.
| название | год | авторы | номер документа |
|---|---|---|---|
| Временная плавучая взлетно-посадочная полоса | 2023 |
|
RU2824218C1 |
| МОБИЛЬНЫЙ ЖЕЛЕЗНОДОРОЖНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС | 1997 |
|
RU2121451C1 |
| Авиационный комплекс короткого взлета и посадки скоростного летательного аппарата | 2023 |
|
RU2835697C2 |
| МОРСКОЙ МОБИЛЬНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС | 2012 |
|
RU2545140C2 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС С УНИВЕРСАЛЬНЫМ СИЛОВЫМ УСТРОЙСТВОМ | 2012 |
|
RU2497714C2 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СПОСОБ АЭРОДРОМНОГО ОБЕСПЕЧЕНИЯ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2408504C2 |
| Аэродромная установка рекуперации энергии самолета при посадке для разгона самолета на взлете | 2018 |
|
RU2668768C1 |
| СПОСОБ АЭРОДРОМНОГО ОБЕСПЕЧЕНИЯ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2453479C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
Изобретение относится к области авиации, более конкретно к мобильным аэродромным комплексам. Железнодорожный аэродромный комплекс взлета-посадки летательных аппаратов содержит силовые тяговые установки, например локомотивы, ряд связанных железнодорожных платформ - вагонов-модулей. Платформы выполнены со складными консолями, внешними и внутренними, опирающимися на поворотные балки жесткости, откидными складными вставками торцевого типа, закрепленными замками, закрывающими межвагонные проемы. Аэродромный комплекс выполнен из сдвоенных железнодорожных составов, размещенных на двух прямолинейных путях, ориентированных относительно «розы ветров», в виде равностороннего треугольника для ослабления боковой составляющей ветра, сцепленных с вагонами-локомотивами для осуществления разгона составов со скоростью 100-120 км/ч перед и во время посадки и взлета маневренного летательного аппарата. Изобретение направлено на обеспечение взлета и посадки маневренных летательных аппаратов в условиях ограниченных участков железнодорожных путей. 4 з.п. ф-лы, 3 ил.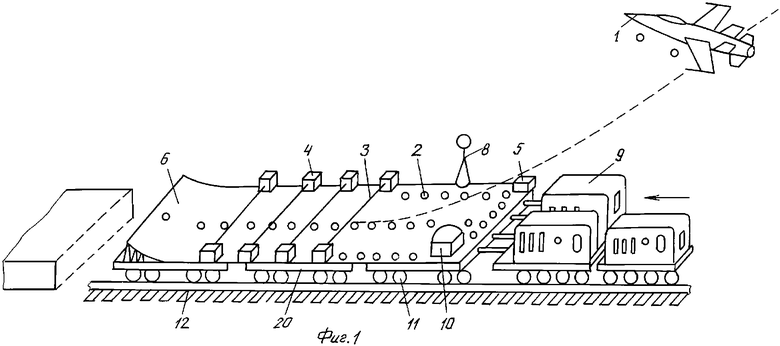
1. Железнодорожный аэродромный комплекс взлета-посадки летательных аппаратов, например, пилотируемых или беспилотных, содержащий силовые тяговые установки, например локомотивы, ряд связанных железнодорожных платформ - вагонов-модулей, выполненных со складными консолями, внешними и внутренними, опирающимися на поворотные балки жесткости, откидными складными вставками торцевого типа, закрепленными замками, закрывающими межвагонные проемы, образующими составы на рельсах смежных параллельных путей с единой жесткой полосой - взлетно-посадочной площадкой, покрытой настилом, отличающийся тем, что аэродромный комплекс выполнен из сдвоенных железнодорожных составов, размещенных на двух прямолинейных путях, ориентированных относительно «розы ветров», в виде равностороннего треугольника для ослабления боковой составляющей ветра, сцепленных с вагонами-локомотивами для осуществления разгона составов со скоростью 100-120 км/ч перед и во время посадки и взлета маневренного летательного аппарата.
2. Железнодорожный аэродромный комплекс взлета-посадки летательных аппаратов по п.1, отличающийся тем, что для осуществления взлета взлетно-посадочная полоса оборудована трамплином с углом установки α=3-5°, обеспечивающим начальный угол траекторного взлета, при этом длина разбега сокращена до 150-200 м для взлетающего на форсажном режиме работы двигателя летательного аппарата.
3. Железнодорожный аэродромный комплекс взлета-посадки летательных аппаратов по п.1, отличающийся тем, что дополнительно установлены аэрофинишеры тросового типа с гидравлическими тормозными устройствами, ограничивающими взаимное перемещение маневренного летательного аппарата и взлетно-посадочной полосы, рассеивающими кинетическую энергию приземляющегося летательного аппарата до допустимой перегрузки для посадки снабженных тормозными гаками маневренных летательных аппаратов.
4. Железнодорожный аэродромный комплекс взлета-посадки летательных аппаратов по п.1, отличающийся тем, что в него введена бесплатформенная навигационная система со встроенным приемником GPS/Глонасс, включающая акселерометры, установленные по трем осям, лазерные гироскопы, соединенные с блоками интегрирования перемещения платформ для прецизионного контроля износа железнодорожных путей, и установленная в кабине оператора.
5. Железнодорожный аэродромный комплекс взлета-посадки летательных аппаратов по п.1, отличающийся тем, что в его состав введены системы сигнальных огней посадочной площадки, установленных по оси и по контуру, приводные радиомаяки и командный пункт, установленный на заднем краю взлетно-посадочной полосы.
| СПОСОБ ПРИЗЕМЛЕНИЯ САМОЛЕТА НА ПЛАТФОРМУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093429C1 |
| МОБИЛЬНЫЙ ЖЕЛЕЗНОДОРОЖНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС | 1997 |
|
RU2121451C1 |
| КОНДИЦИОНЕР И УПРАВЛЯЮЩАЯ ПРОГРАММА | 2014 |
|
RU2636915C1 |
| Операционный усилитель на КМДП-транзисторах | 1990 |
|
SU1698951A1 |

