Изобретение относится к способам и устройствам, обеспечивающим сближение и стыковку летательных аппаратов друг с другом.
Наиболее близким к изобретению по совокупности существенных признаков является способ и устройство для стыковки в полете летательных аппаратов.
Известный способ сближения и стыковки летательных аппаратов заключается в их взаимном поиске, сближении и соприкосновении свободного конца гибкой связи одного из них с другим, которые выполняются с использованием их двигателей и/или органов управления, причем с борта одного из них запускают управляемое средство доставки свободного конца гибкой связи, которое при приближении ко второму летательному аппарату притормаживают, улавливают и закрепляют на борту второго летательного аппарата (DE 3644125 A1, B 64 D 5/00, 1987).
Устройство для реализации известного способа содержит бортовую аппаратуру для определения их взаимного положения, соединенную с органами управления полетом, и гибкие связи, свободные концы которых снабжены механизмами стыковки летательных аппаратов между собой, причем один из летательных аппаратов снабжен механизмами для улавливания, торможения и закрепления гибких связей на этом летательном аппарате. (DE 3644125 A1, B 64 D 5/00, 1987).
Недостатком известных способа и устройства является невозможность передачи людей и грузов, а также доставки одного летательного аппарата другим к месту приземления.
Техническим результатом, для достижения которого предназначены изобретения, является обеспечение контактирования и соединения летательных аппаратов друг с другом фюзеляжами с образованием составного летательного аппарата.
Указанный результат достигается тем, что при сближении и соединении летательных аппаратов друг с другом используются гибкие связи. На этапе предпосадочного приведения и сближения используется приводная гибкая связь, а при их притягивании и соединении буксирная гибкая связь. Гибкие связи одним концом закреплены на присоединяемом летательном аппарате, а их свободные концы соединены с летающими транспортными средствами: управляемом с приводной гибкой связью и неуправляемым с буксирной гибкой связью - доставляемыми на самолет, где они и закрепляются. После доставки приводной связи ее натягивают и используют для определения взаимного положения летательных аппаратов, так как она является гипотенузой прямоугольных треугольников, образуемых ею с осями летательных аппаратов. Сближение летательных аппаратов заканчивается их синхронным полетом друг над другом, при котором присоединяемый летательный аппарат как бы зависает над самолетом, занимает определенное положение и из метательного устройства выстреливает неуправляемое транспортное средство-якорь с буксирной гибкой связью в самолет. Захват и закрепление якоря, притягивание и присоединение летательных аппаратов друг с другом производится механизмом, перемещающим бесконечную ленту-сетку и расположенным под окном в фюзеляже самолета.
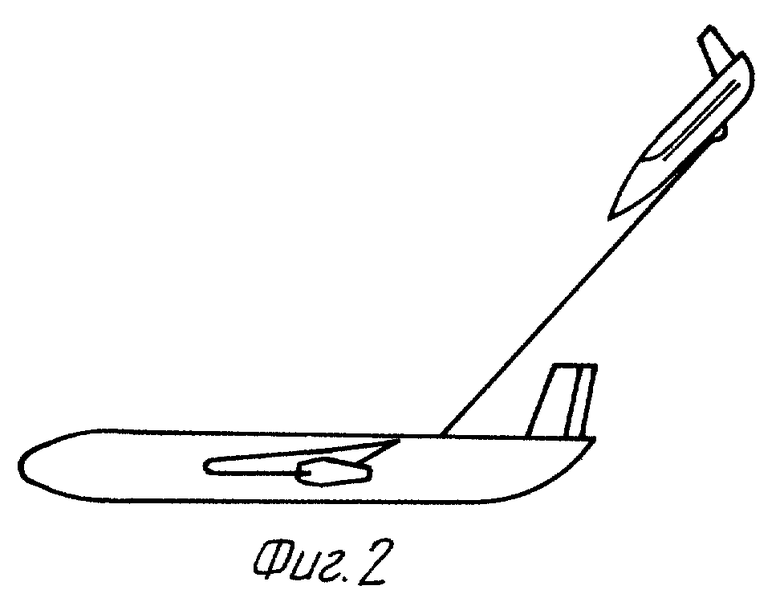
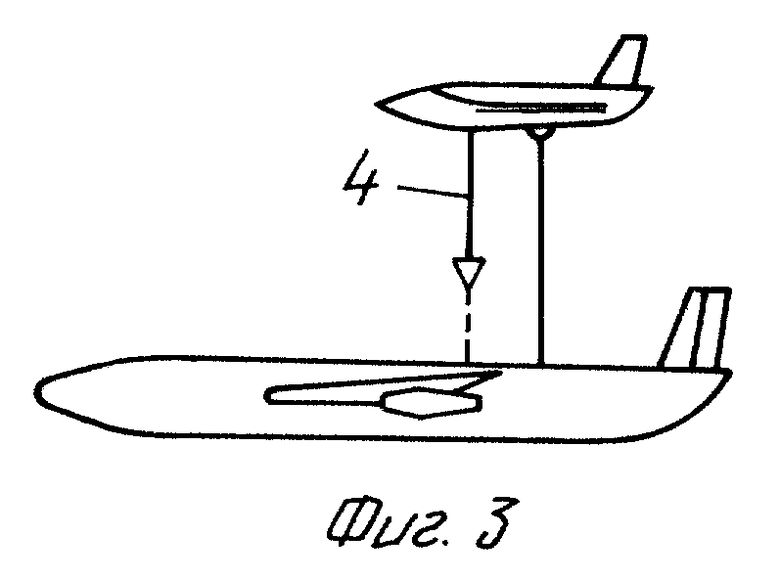
На фиг. 1, фиг. 2 и фиг.3 изображено положение летательных аппаратов и гибких связей, их соединяющих при сближении, приведении и притягивании соответственно.
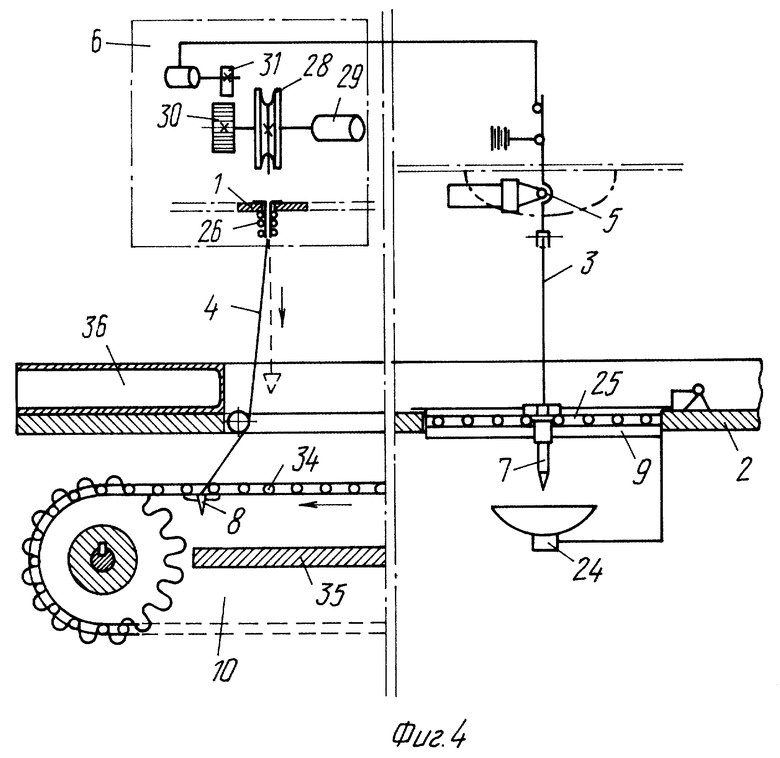
На фиг. 4 изображены летательные и пусковые устройства присоединяемого летательного аппарата, а также ловитель с закрепленным в нем управляемом средстве доставки и механизм притягивания в момент попадания в него неуправляемого якоря.
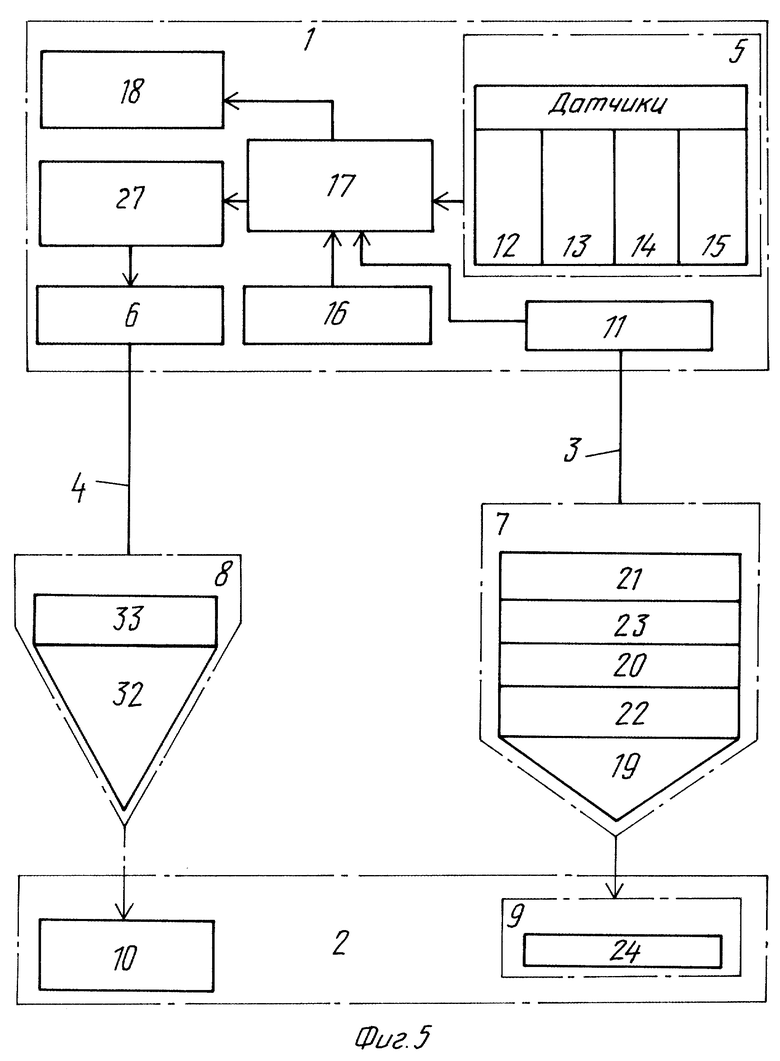
На фиг. 5 изображена блок-схема комплекса устройств, установленных на присоединяемом летательном аппарате и на самолете.
Способ сближения и соединения летательных аппаратов в полете с использованием гибких связей выполняется следующим образом.
После того, как они предварительно сблизятся с использованием навигационных, например радиолокационных средств, головка самонаведения и дальнометрирования управляемого транспортного средства, установленного на присоединяемом летательном аппарате, используя сигналы, посылаемые с самолета, определяет дальность до него и момент пуска управляемого средства. Обгоняя присоединяемый летательный аппарат, управляемое транспортное средство разматывает и натягивает приводную гибкую связь, и летательный аппарат приближается к самолету уже ориентируясь на ее положение. В полете транспортное средство при помощи головки самонаведения определяет направление, дальность до излучателя и момент выключения двигательной установки транспортного средства при подлете к самолету. При попадании в ловитель лапы его якорного устройства раскрываются и закрепляют управляемое средство на самолете. По мере сближения летательных аппаратов, выбирая при помощи лебедки слабину, гибкую связь натягивают, измеряют ее параметры и, используя их, определяют положение относительно друг друга. Затем они сближаются и переходят в синхронный полет, при котором присоединяемый летательный аппарат как бы зависает над самолетом, маневрируя занимает определенное положение и выстреливает неуправляемый якорь с буксирной гибкой связью в механизм притягивания, установленный на самолете. Пролетев через окно в фюзеляже самолета и попав в его механизм притягивания, лапы неуправляемого якоря раскрываются и закрепляют его в механизме. После чего согласованно работая, механизм притягивания и лебедка выбора слабины за соответствующие гибкие связи горизонтируют, притягивают летательные аппараты друг к другу и соединяют, образуя составной летательный аппарат.
Способ сближения и соединения находящихся в полете космического летательного аппарата 1 с самолетом 2 осуществляется при помощи гибких связей, одна из которых используется при их сближении в качестве привода 3, а другая в качестве буксира 4 при соединении летательных аппаратов. На космическом летательном аппарате 1 установлены пусковое 5 и метательное 6 устройства, соответственно заряженные управляемым реактивным снарядом 7 с приводной гибкой связью 4, а на самолете 2 механизмы, один из которых 9 улавливает снаряд 7, а другой 10 улавливает якорь 8 и за буксир 4 притягивает летательные аппараты друг к другу.
Пусковое устройство 5 снабжено механизмом натяжения 11 приводной гибкой связи 3 и датчиками измерения ее параметров: наклонов по крену 12, азимуту 13 и углу места 14, длины 15 и усилия натяжения 16. Датчики через командно-решающий аппарат 17 соединены с механизмом натяжения 11, органами управления полетом 18 космического летательного аппарата 1 и устройством метания 6 якоря 8. Управляемый снаряд 7 содержит головку самонаведения и дальнометрирования 19, соединенную с его двигательной установкой 20 и органами управления полетом 21, а также якорный механизм 22, соединенный с датчиком соприкосновения 23 снаряда с ловителем 9, установленном на самолете 2.
Ловитель 9 снабжен излучателем 24, сигналы которого согласованы с головкой наведения 19 управляемого снаряда 7 и гасителем кинетической энергии снаряда в виде эластичной сети 25. Установленное на космическом летательном аппарате 1 устройство метания 6 состоит из пружинного механизма 26, сжимаемого якорем 8, системы наведения 27, барабана 28, на который намотан буксир 4. Барабан соединен с приводом 29 и снабжен храповиком 30 с управляемым стопором 31. Неуправляемый якорь 8 снабжен датчиком соприкосновения 32, соединенным с механизмом выдвижения его лап 33. Установленный на самолете 2 механизм улавливания и притягивания 10 неуправляемого якоря 8 выполнен по типу транспортера, движущаяся лента которого имеет вид сетки 34, а между ее верхней и нижней ветвями расположен экран 35. Кроме того, самолет 2 снабжен амортизатором 36 в виде пневмоподушки.
При сближении летательных аппаратов устройство функционирует следующим образом.
Находящийся на космическом летательном аппарате 1 в пусковом устройстве 5 управляемый реактивный снаряд 7 при помощи своей головки самонаведения 19 осуществляет прием сигналов излучателя 24, встроенного в ловитель 9, установленный на самолете 2 и производит определение направления и дальности до него.
После достижения космическим летательным аппаратом 1 определенной дальности до самолета 2 по сигналу головки самонаведения 19 осуществляется запуск реактивного снаряда 7. В процессе полета снаряд 7 прокладывает приводную гибкую связь 3, соединяющую его с космическим аппаратом 1, а его головка самонаведения 19 определяет направление и расстояние до излучателя 24, управляет работой его двигателя 20 и органами управления полетом 21.
Полет снаряда 7 заканчивается попаданием в ловитель 9, где из него при соприкосновении хвостовой части с преградой в виде эластичной сети 25 по команде датчика 23 выдвигаются лапы якорного механизма 22. Находящийся в пусковом устройстве 5 датчик натяжения 16, реагируя на провисание привода 3, включает механизм выбора ее слабины и натяжения 11. Параметры гибкой связи 3 в натянутом состоянии измеряются датчиками: углов ее наклона относительно осей летательного аппарата 1 по крену 12, азимуту 13 и углу места 14, а также длины 15 между летательными аппаратами. Показания датчиков 12, 13, 14 и 15 передаются в командно-решающий аппарат 17, а затем на органы управления полетом 18 космического аппарата 1 и на исполнительные механизмы наведения 27 метательного устройства 6. При достижении определенной длины приводной гибкой связи 3 сближение летательных аппаратов прекращают и маневрируя переводят их в синхронный полет, при котором космический аппарат 1 зависает над самолетом 2. При достижении приводной гибкой связью 3 определенного, например вертикального, положения, при помощи системы наведения 27 метательное устройство 6 нацеливают в направлении самолета 2 и выстреливают из него неуправляемый якорь 8 с буксирной гибкой связью 4. Выталкивание якоря 8 производится при помощи предварительного сжатого привода 29 пружинного механизма 26 после отведения стопора 31 храповика 30 и освобождения барабана 28 с намотанной на него буксирной гибкой связью 4. Разматывая ее якорь 8 через окно в фюзеляже самолета 2 и верхнюю ветвь движущейся ленты 34 попадает внутрь механизма притягивания 10, где сталкивается с экраном 35. После столкновения по команде датчика соприкосновения 32 срабатывает механизм выдвижения лап 33 и якорь 8, зацепившись за ленту 33 начинает вместе с нею перемещаться и за буксирную гибкую связь 4 притягивает космический летательный аппарат 1 к пневмоподушке 36, которой оснащен самолет 2, соединяя их в единое целое для совместного полета к месту приземления.
Изобретения предназначены для обеспечения возможности сближения и соединения в полете космических и/или воздушных летательных аппаратов. При реализации способа в процессе сближения летательных аппаратов их соединяют механически при помощи гибких связей. Гибкие связи используют для определения взаимного положения и притягивания летательных аппаратов друг к другу. Доставку свободных концов гибких связей осуществляют при помощи управляемых и неуправляемых транспортных средств. Управляемые транспортные средства выполнены на основе управляемых по проводам реактивных снарядов, оснащенных головкой самонаведения и якорным устройством. Неуправляемое транспортное средство, которое выполнено в виде якоря с лапами, выдвигаемыми при столкновении с преградой, выстреливает из устройства типа гарпунной пушки. По окончании полета транспортные средства при помощи эластичных сетей механизмов улавливают, тормозят и закрепляют. Затем гибкие связи натягивают и используют для определения координат летательных аппаратов относительно друг друга, их притягивания и соединения с образованием составного летательного аппарата. Техническим результатом является обеспечение контактирования и соединения летательных аппаратов с образованием составного летательного аппарата. 2 с. и 9 з.п.ф-лы, 5 ил.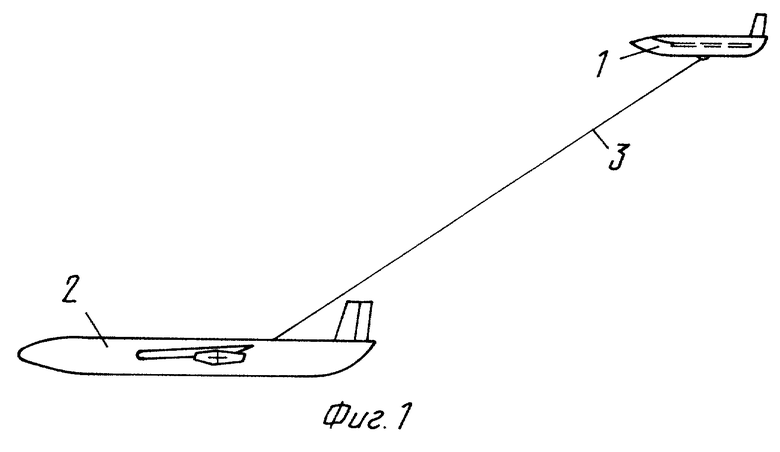
| DE 3644125 A1, 27.08.87 | |||
| СПОСОБ БУКСИРОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2070146C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОЧИСТКИ СТОЧНЫХ ВОД | 2001 |
|
RU2205798C1 |

