Изобретение относится к области авиации и может быть использовано для осуществления безаэродромных посадок и взлетов летательных аппаратов (ЛА).
Известны способы взлета и посадки ЛА, а также устройство для осуществления этих способов, включающие размещение выше высоты горизонтального полета ЛА соединенную с землей гибким элементом (ГЭ) аэростатической воздушной гавани, оборудованной направляющей с подвижным на ней приводом. Направляющую крепят к воздушной гавани со стороны земли, подвижный привод оборудован тросом с захватным устройством, посредством которого трос соединяют с ЛА, поднимают его на высоту взлета, включают двигатели и производят разгон по направляющей привязанного к приводу ЛА, одновременно выпуская трос из перемещаемого по направляющей привода. Когда ЛА разгоняется до скорости горизонтального полета производят отстыковку захватного устройства и переводят ЛА в свободный полет. Для осуществления посадки ЛА из привода выводят на тросе захватное устройство, с которым ЛА соединяют при подлете его к гавани, после чего производят гашение горизонтальной скорости ЛА в процессе перемещения привода по направляющей (патент РФ №2270786 от 18.02.2004, B64d 5/00, B64f 1/04).
Практическая реализация этих способов и устройства потребует очень высокоточного наведения ЛА на захватное устройство и прецезионной их стыковки, т.к. необходимо будет стыковать неустойчивые в воздушной среде системы. Это соответственно потребует очень высокоточного пилотирования и сложных технологий стабилизации, что совместно с громоздкостью воздушной платформы усложнит и увеличит стоимость реализации данного изобретения.
Известны способы запуска и посадки беспилотного ЛА (БЛА), а также устройство реализации этих способов, подъем на высоту 2-х привязных к беспилотному катеру аэростатов, обеспечивающих растяжение на высоте в горизонтальном направлении захватного ГЭ, на который при посадке БЛА наводят его посадочный гак до зацепления за ГЭ с фиксацией на нем подвешенного БЛА для последующего приземления на беспилотный катер в режиме буксирования и притягивания к нему привязных аэростатов. Для запуска БЛА выше перечисленные операции производят в обратном порядке и на высоте отцепляют БЛА от ГЭ для перевода в свободный полет (патент США №7264204 от 04.09.2007, B64f 1/02).
Практическая реализация этого способа посадки устройства также потребует высокоточного наведения БЛА на горизонтальный ГЭ, т.к. размер посадочного гака ограничены, а ГЭ в такой системе будет колыхаться и в случае неудачи БЛА получит удар с потерей скорости, что приведет к его падению. Кроме этого, для снижения перегрузок от динамичного торможения требуется буксирование аэростатов с точным контролированием натяжения в их привязи, что усложняет всю систему и ограничивает маневрирование катера.
Известен способ посадки БЛА, а также устройство для его реализации, включающее наведение консоли крыла БЛА на растянутый в вертикальном направлении гибкий элемент ГЭ, на который налетает передняя кромка крыла БЛА, имеющая прямую стреловидность и с помощью которой ГЭ проскальзывает как по направляющей к замковому захвату, который фиксирует ГЭ, на котором БЛА подвисает и его опускают для приземления (патент США №2007/0108345 от 2007.05.17, B64f 1/02). В таком варианте реализация этого изобретения также потребует точности наведения ввиду ограниченности размера консоли, к тому же неоднозначная динамика захвата им ГЭ требует определенную стреловидность передней кромки крыла, контроль скорости БЛА, прослабления натяжения и положения ГЭ в пространстве и, соответственно, усиление жесткости и антифрикционности кромки крыла, что усложняет процесс захвата ГЭ и снижает надежность посадки, ограничивает возможности системы. Другой вариант посадки предусматривает разворачивание из БЛА отвесно вниз якорного захватного устройства на гибком фале, который на посадке перекрестно наводят на ГЭ, перехлестывают их, проскальзывают фалом по ГЭ и зацепляют его замком якоря, производят торможение и зависание БЛА. Для перекрестного перехлеста ГЭ и фала требуется наклонное к вертикали положение ГЭ и наведение на него фала по траектории из условия перекрещивания их плоскостей проецирования на землю, что ограничивает возможности применения такой посадки сложностью полетного маневрирования. Помимо этого при таком захвате инерционность якорного замка делает динамику перехлестывания и проскальзывания фала по ГЭ неопределенной, с возможным закручиванием фала на ГЭ и несрабатыванием фиксации, причем все это усугубляется разгоном БЛА на пикировании, резким его торможением и вообще повышает вероятность аварийности, что особенно проблематично для ЛА с повышенной посадочной энергией, а последующее зависание БЛА в перевернутом положении еще и осложняет его обслуживание.
Целью настоящего изобретения в части посадки является обеспечение высоконадежной высокоэффективной технологии безаэродромной посадки с раширением диапазона допустимой посадочной энергии ЛА.
Поставленная цель достигается тем, что в способе посадки, включающем наведение на растянутый в вертикальной плоскости гибкий элемент (ГЭ) посадочной траектории ЛА, с которого выводят захватный фал с якорным устройством (ЯУ), оборудованном аэродинамическим носителем, с помощью которого производят разворачивание фала в боковом относительно продольной оси ЛА направлении в режиме аэродинамического буксирования летательным аппаратом ЯУ, затем осуществляют захват фалом ГЭ путем перехлестывания и их взаимного проскальзывания с последующим зацеплением ГЭ замком ЯУ, после чего ЛА тормозят в привязном режиме полета и переводят в зависание на подвеске фала и ГЭ с последующим обслуживанием ЛА.
В процессе захвата фалом ГЭ может быть осуществлен перевод полетной траектории ЛА в вираж в боковую сторону, противоположную стороне разворачивания захватного фала, при этом торможение ЛА осуществляют в режиме привязного полета со снижением по спиралевидной траектории.
Разворачивание захватного фала с аэродинамическим якорным устройством (АЯУ) может осуществляться в верхней или нижней полусфере относительно ЛА.
Отделение АЯУ от ЛА может осуществляться путем трансформации участка поверхности ЛА в аэродинамические поверхности якорного устройства с возможностью их обратной трансформации.
В аэродинамические поверхности может быть трансформирована крышка парашютного отсека, при этом отделение и раскрытие парашюта производят по отдельной команде после разворачивания АЯУ, причем наведение фала может быть осуществлено мимо ГЭ.
Перед разворачиванием захватного фала может производиться отвод АЯУ от ЛА в воздушный поток посредством складного манипулятора.
Разворачивание захватного фала первоначально может производиться позади ЛА, с последующим переводом с помощью АЯУ перед наведением на ГЭ в боковое положение относительно ЛА.
Первоначальное разворачивание захватного фала может производиться вверх над ЛА, с последующим переводом его перед наведением на ГЭ в боковое положение.
В качестве ГЭ может быть использован привязной леер аэростатического или аэродинамического носителя.
В качестве ГЭ может быть использована одна из ветвей трособлочной системы, подвешенной под привязным аэростатическим или аэродинамическим носителем и подключенной к силовому приводу.
В процессе захвата фалом ГЭ может быть осуществлен перевод ЛА в набор высоты с переходом в круговой привязной полет с торможением при снижении по спиралевидной траектории, или с торможением ЛА в режиме маятниковых затухающих качаний на подвеске фала и ГЭ.
В процессе захвата фалом ГЭ может производиться подъем последнего.
Может осуществляться посадка ЛА на ГЭ, разворачиваемый в полете из транспортного ЛА в качестве другого АЯУ.
Может осуществляться посадка ЛА на ГЭ транспортного ЛА, имеющего более высокую скорость полета, чем садящийся ЛА, для чего производят наведение ГЭ транспортного ЛА на захватный фал садящегося ЛА в процессе обгона последнего, при этом после зацепления ГЭ с фалом садящийся ЛА переводят в режим буксирного полета за транспортным ЛА.
В процессе посадки ЛА может быть осуществлено разворачивание двух захватных фалов с двумя АЯУ в противоположных боковых направлениях относительно продольной оси ЛА.
Посадка ЛА может быть осуществлена с наведением захватного фала на ГЭ с помощью системы спутниковой навигации, элементы ориентации которой устанавливают на ЛА и АЯУ.
Наведение захватного фала на ГЭ может осуществляться с помощью радиолокационной системы наведения, локатор которой размещают вдоль посадочной траектории ЛА позади ГЭ и корректируют взаимоположение ГЭ и связки ЛА с АЯУ.
В процессе посадки ЛА может быть осуществлено развертывание с помощью АЯУ антенного устройства бортового приемника системы наведения, посредством которого в процессе наведения связки ЛА с АЯУ на ГЭ принимают сигналы установленного на нем излучателя и ориентируют параллельные полетные траектории ЛА и АЯУ с расположением ГЭ между ними.
В процессе посадки ЛА после зацепления его фала за ГЭ летательный аппарат может быть переведен в режим парашютирования.
Посадка на ГЭ может производиться на высоте, достаточной для осуществления запуска ЛА путем отцепления АЯУ от ГЭ и перевода ЛА в разгон на снижении до скорости горизонтального полета.
В режиме зависания ЛА на ГЭ и фале они могут использоваться в качестве конструкционных коммуникаций для соединения ЛА с системами его обслуживания.
В режиме зависания ЛА может быть соединен с зарядной электрической системой или дозаправочной топливной системой.
Посадка ЛА на ГЭ может осуществляться на высоте, достаточной для перевода зацепленного ЛА в режим кругового моторного привязного полета с достаточной для этого скоростью.
Предлагаемый способ посадки иллюстрируется чертежами, на которых изображены:
на фиг.1а - схема процесса разворачивания с ЛА захватного фала при посадке в варианте расположения АЯУ над крылом ЛА;
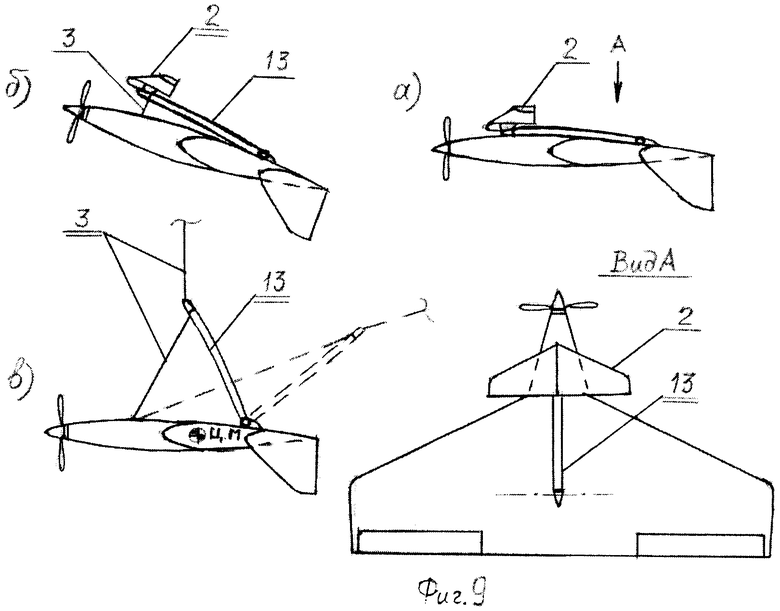
на фиг.1б, 9б и 9в - схемы процесса разворачивания с ЛА захватного фала в варианте расположения АЯУ на стыковочном узле ЛА с образованием совместно с фалом подвесной уздечки;
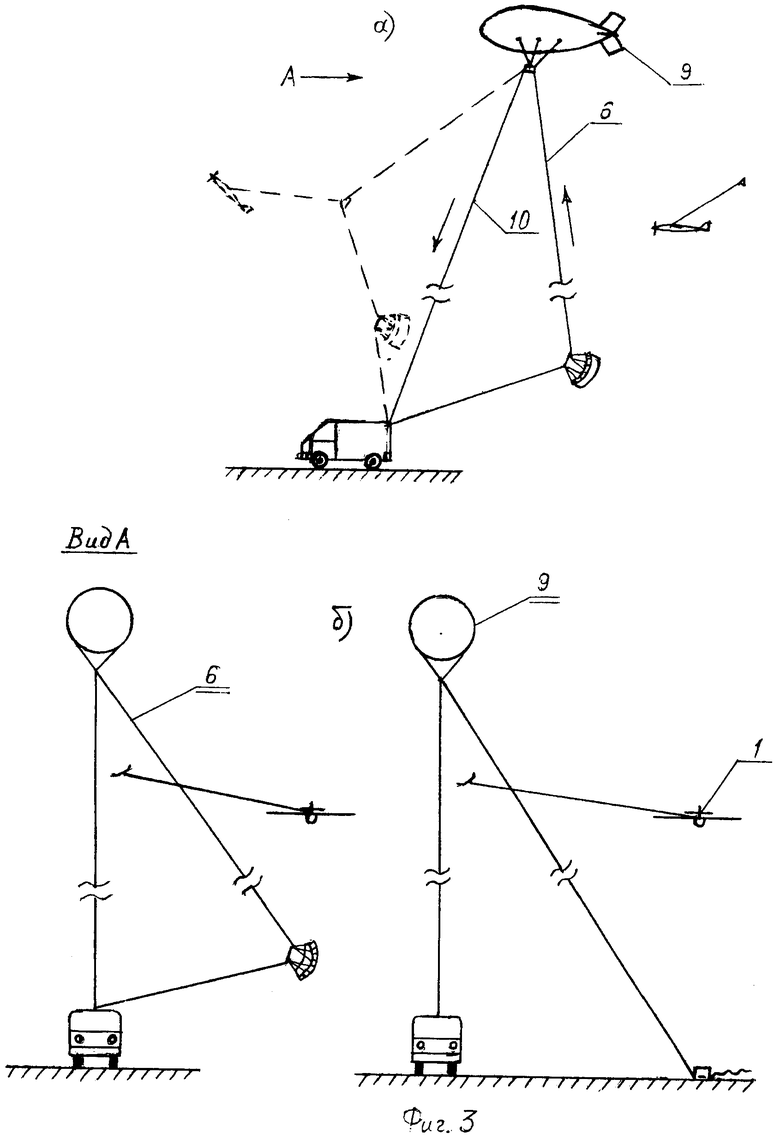
на фиг.2а - схема процесса посадки при наведении ЛА с развернутым АЯУ на ГЭ в варианте леера привязного гибридного аэростатического носителя;
на фиг.2б - схема процесса посадки ЛА на ГЭ в варианте леера привязного аэродинамического носителя типа парафойла;
на фиг.3а - схема процесса посадки при наведении ЛА с развернутым АЯУ на участок троса тросо-блочной системы привязного аэростатического носителя (ПАН);
на фиг.3б - схема процесса посадки ЛА на участок оттяжного троса, подвешенного под ПАН и с тарированным усилием прикрепления свободного конца троса к месту базирования ПАН;
на фиг.5 - схема процесса посадки ЛА в варианте наведения его АЯУ на ГЭ, подвешенный под дирижаблем;
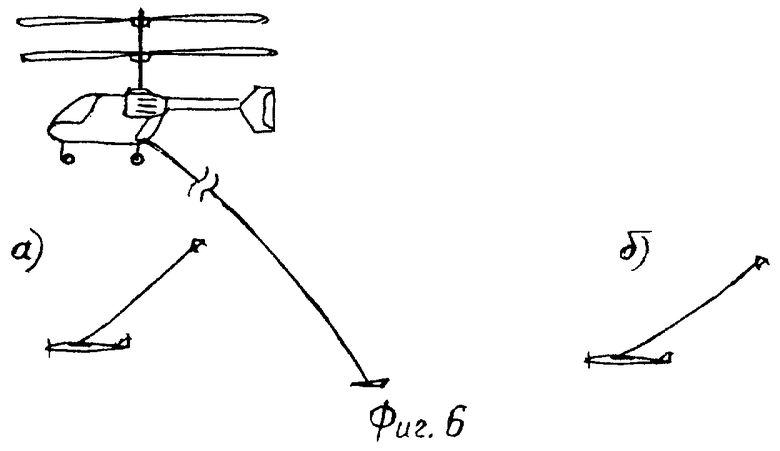
на фиг.6а - схема процесса посадки ЛА в варианте наведения ГЭ вертолета-носителя на фал АЯУ ЛА;
на фиг.6б - схема процесса посадки ЛА в варианте наведения его АЯУ на ГЭ, подвешенный под летящим вертолетом-носителем;
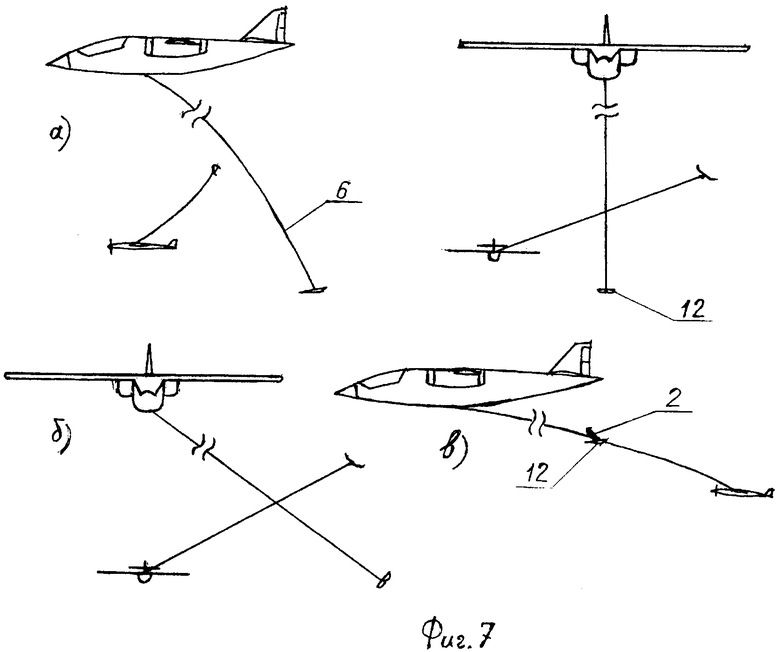
на фиг.7а - схема процесса посадки ЛА при наведении на его фал АЯУ гибкого элемента, подвешенного вертикально под более скоростным, чем ЛА, самолетом-носителем;
на фиг.7б - схема процесса посадки ЛА при наведении на его фал АЯУ гибкого элемента, подвешенного наклонно под скоростным самолетом-носителем;
на фиг.7в - схема процесса транспортирования ЛА, посаженного на ГЭ самолета-носителя путем буксирования последним;
на фиг.9б - схема процесса отвода АЯУ от ЛА в воздушный поток посредством складного манипулятора.
Предложенный способ посадки реализуется следующим образом. Снабженный системой аэродинамического якорного устройства 2 (АЯУ) летательный аппарат 1 при заходе на посадку нацеливают на растянутый в вертикальном направлении гибкий элемент (ГЭ) посадочной системы, например, леер 6 привязного гибридного носителя 7, или привязного аэродинамического носителя 8 (фиг.1 и 2). От ЛА отстыковывают аэродинамический носитель 2 на захватном фале 3, выводят его в воздушный поток и в процессе буксирования летательным аппаратом производят разворачивание фала в боковом направлении относительно ЛА, после чего осуществляют перекрестное наведение фала 3 на леер 6 с последующим их взаимным перехлестыванием и проскальзыванием. В результате этого замком 4 АЯУ зацепляют леер 6 и переводят ЛА в привязной режим полета в подвесе на связке фала и леера, где производят его торможение на криволинейных траекториях, например, в виде качания вперед-вверх (фиг.2а и 3а), после чего переводят ЛА в зависание на связке и дальнейшее послеполетное обслуживание, например, с опусканием ЛА на площадку базирования аэростата.
Известен способ запуска БЛА и устройство для его реализации, включающие зацепление БЛА посредством специального узла с замком за ГЭ, посредством которого БЛА поднимают на высоту взлета, где включают двигатель, открытием замка отцепляют БЛА от ГЭ и переводят в свободный полет путем разгона на снижении до скорости полета (патент США №2005017129 от 27.01.2005, B64f 1/02, B64c 25/68, B64c 39/02).
Недостатком данного способа является значительная просадка по высоте в процессе запуска БЛА, вынуждающая производить набор запаса дополнительной высоты для безопасности взлета. Причем чем больше вес БЛА, тем больше просадка, что существенно ограничивает возможности системы взлета. К тому же для стабилизации во время подъема БЛА его двигатель приходится включать только на высоте, т.е. усложняется управление и его мощность не используется для подъема.
Целью изобретения в части взлета является обеспечение надежной и эффективной технологии безаэродромного взлета с расширением возможностей системы взлета.
Поставленная цель изобретения в части взлета достигается тем, что в способе взлета летательного аппарата (ЛА) с помощью взлетной системы с растянутым в вертикальной плоскости гибкого элемента (ГЭ), зацепление ЛА за ГЭ осуществляют посредством отстыкованного от ЛА и соединенного с ним фалом замка якорного устройства (ЯУ), оборудованного аэродинамическим носителем, начинают подъем ГЭ, посредством него разворачивают фал и производят подъем подвешенного на нем и ГЭ летательного аппарата на высоту взлета, где фал отцепляют от ГЭ и переводят ЛА в режим свободного полета, при этом в процессе подъема летательный аппарат переводят в режим привязного полета, при переходе из которого в свободный полет фал сворачивают на борт ЛА в режиме буксирования им ЯУ, после чего осуществляют стыковку последнего с ЛА.
Якорное устройство с фалом может быть оборудовано аэродинамическим носителем, посредством которого сворачивание фала производят в режиме аэродинамического буксирования ЯУ с помощью ЛА.
Разворачивание фала с подготовленного к запуску ЛА и его подъем на подвеске может осуществляться в режиме ускоренного подъема наклонного ГЭ с включенным движителем ЛА, который в процессе отцепления от ГЭ переводят в режим криволинейного полета.
Режим привязного полета ЛА на подвеске может быть круговым с приводом от движителя ЛА.
Процесс подъема подвески ЛА может осуществляться с постепенным его разгоном в режиме маятникового раскачивания на подвеске, инициированным путем придания продольных колебаний гибкому элементу, которые преобразуют в увеличение амплитуды маятниковых раскачиваний ЛА на связке.
Разгон ЛА в режиме привязного полета на подвеске фала может осуществляться путем чередования маятникового раскачивания ЛА с переходом в круговой полет.
Подъем и буксирование ЛА на связке ГЭ с фалом может осуществляться с помощью транспортного ЛА, при этом отцепление фала от ГЭ производят при переводе ЛА в снижение.
Стыковка ЯУ с ЛА в свободном полете может осуществляться посредством складного манипулятора, который совместно с ЯУ используют в качестве регулируемого антенного устройства.
Стыковка АЯУ с ЛА может осуществляться над местом сочленения крыла и фюзеляжа с образованием профилированной щели, при этом аэродинамические поверхности АЯУ используют в качестве управляемого спойлера, с помощью которого оптимизируют аэродинамическую интерференцию крыла.
Стыковка АЯУ с ЛА может осуществляться в его передней части, при этом аэродинамические поверхности ЯУ используют в качестве передних крыльев аэродинамической схемы утка, причем в крейсерском полете крылья переводят во флюгерирующий режим, а для снижения скорости полета ЛА крылья переводят в режим управления их углом атаки.
Стыковка АЯУ может осуществляться с хвостовым оперением ЛА, при этом с помощью аэродинамических поверхностей АЯУ осуществляют триммирование в управлении ЛА.
Предложенный способ взлета ЛА иллюстрируется чертежами, на которых изображены:
на фиг.4а - схема варианта процесса взлета ЛА путем его разгона раскачиванием на подвеске из фала АЯУ и ГЭ;
на фиг.4б - схема сил, приложенных к ЛА на подвеске и способствующих его разгону перед взлетом;
на фиг.4в - схема варианта процесса взлета ЛА путем отцепления его АЯУ от ГЭ;
на фиг.4г - схема процесса взлета ЛА путем его разгона по круговым траекториям на подвеске под ПАН;
на фиг.4д - схема процесса подтягивания фала АЯУ и его пристыковывания к ЛА после его взлета.
Предложенный способ взлета ЛА реализуется следующим образом. Разворачивают в вертикальной плоскости ГЭ системы взлета, например, леер 6 привязного ЛА типа аэростата 7, оборудованного силовым приводом для подъема и опускания леера. От подготовленного к взлету ЛА отстыковывают ЯУ и начинают разворачивать с борта ЛА соединяющий их захватный фал 3, зацепляют замок 4 за леер 6, включают его привод и продолжают подъем леера вплоть до полного разворачивания фала ЯУ, после чего начинают подъем на его подвеске самого ЛА. В процессе такого подъема ЛА переводят в режим привязного полета, например, постепенный его разгон путем маятникового раскачивания, или чередования маятникового раскачивания с переходом в круговой полет (фиг.4а, 4г). Режим привязного полета ЛА на подвеске может быть круговым с приводом от движителя ЛА (фиг.4г).
Процесс разгона может инициироваться также путем придания лееру от привода продольных колебаний, которые преобразуют в подъемную силу привязного полета ЛА, в результате чего, по достижении достаточной для взлета высоты, отцепляют замок от леера и переводят ЛА в свободный полет, где фал сворачивают обратно на борт ЛА в режиме, например, аэродинамического буксирования последним ЯУ, которое впоследствии стыкуют с ЛА (фиг.4а, 4д).
Разгон ЛА может осуществляться также, например, в процессе ускоренного подъема наклонного к горизонту леера, при этом при отцеплении от него аэродинамического якорного устройства (АЯУ) летательный аппарат переводят в полет по криволинейной траектории.
Подъем и буксирование ЛА на связке фала с ГЭ может осуществляться с помощью ЛА-буксировщика, при этом отцепление фала от ГЭ производят при переводе ЛА в снижение (фиг.7в).
Могут быть использованы два АЯУ, которые при переводе ЛА в свободный полет стыкуют, например, к законцовкам крыла, при этом с помощью аэродинамических поверхностей АЯУ оптимизируют аэродинамику концов крыла и управление (фиг.8).
Известна взлетно-посадочная система для БЛА, содержащая подвешенный под вертолетом и растянутый в вертикальной плоскости ГЭ в виде троса с упором на свободном конце, для взаимодействия с которым БЛА оборудован захватным устройством с замком, выполненным в виде смежных поверхностей передней кромки крыла и фюзеляжа и с возможностью ручного зацепления БЛА за упор троса для подъема его на высоту взлета там путем отцепления замка от троса. Замок также имеет возможность автоматического зацепления за трос при посадке БЛА путем полетного наведения на него захватного устройства вплоть до их контактирования, проскальзывания к замку троса с упором, который фиксируется замком, в результате чего БЛА тормозится тросом и повисает на нем.
Недостатком данной системы является то, что в ней применим только подвешенный ГЭ с упором на нижнем конце, процесс захвата и зацепления которого в данной конструкции имеет неоднозначную динамику и требует очень точного наведения, т.к. трос должен точно проскользнуть по фюзеляжу к расположенному над крылом замку, что непременно осложняется многофакторным взаимодействием БЛА с тросом. В целом это снизит надежность и усложнит эксплуатацию, что делает применение такой взлетно-посадочной системы проблематичным.
Целью предложенного изобретения в части устройства является создание взлетно-посадочной системы повышенной надежности и универсальности.
Поставленная цель достигается тем, что во взлетно-посадочной системе для ЛА, содержащей растянутый в вертикальной плоскости и снабженный приводом гибкий элемент (ГЭ), для взаимодействия с которым ЛА оборудован якорным устройством, которое выполнено в виде смотанного на бортовую лебедку ЛА захватного фала, оборудованного замком для ГЭ и аэродинамическим носителем, разъемно установленными на ЛА посредством стыковочного узла, при этом захватный фал проходит через направляющий элемент, стыковочный узел и свободным концом соединен с замком и аэродинамическим носителем.
Аэродинамические поверхности носителя АЯУ могут быть выполнены автоматически или дистанционно управляемыми.
Аэродинамические поверхности носителя могут быть выполнены трансформируемыми из участков поверхности ЛА с возможностью обратной трансформации.
Замок АЯУ может быть выполнен автоматически или дистанционно управляемым.
Стыковочный узел может быть выполнен в виде ложемента позиционирования замка и аэродинамических поверхностей носителя относительно ЛА с образованием между аэродинамическими поверхностями носителя и поверхностью ЛА профилированной спойлерной щели.
Стыковочный узел и АЯУ может быть установлен на верхней или на нижней поверхностях ЛА.
Ложемент для замка АЯУ может быть снабжен дополнительным направляющим элементом для фала и установлен на свободном конце шарнирно установленного на ЛА складного манипулятора с образованием совместно с фалом над центром масс ЛА подвесной треугольной уздечки, при этом уздечка позиционирует подвес ЛА с горизонтальным положением его продольной оси.
Ложемент манипулятора может быть установлен в передней или задней частях ЛА.
Ложемент может быть установлен на хвостовое оперение ЛА и снабжен дополнительным направляющим элементом, выполненным с возможностью освобождения фала, при этом захватный фал проходит через расположенный над центром масс ЛА его направляющий элемент.
ЛА может быть оборудован двумя АЯУ, ложементы для замков которых установлены на концевых частях крыла, а два захватных фала проходят внутри консолей крыла, при этом направляющие элементы фалов расположены на ложементах.
ГЭ может быть выполнен виде леера привязного ЛА, при этом ГЭ соединяет его снизу с неподвижной или подвижной платформой.
ГЭ может быть подвешен под привязным ЛА, при этом на нижнем свободном конце ГЭ установлено дополнительное якорное устройство с управляемым замком.
ГЭ может быть подвешен под самоходным ЛА-носителем, при этом на его нижнем свободном конце может быть установлен дополнительный АЯУ с управляемым замком.
Предлагаемая взлетно-посадочная система для ЛА иллюстрируется чертежами, на которых изображены:
на фиг.1a - вариант расположения АЯУ и его стыковочного узла над крылом ЛА с образованием между аэродинамическими поверхностями носителя АЯУ и поверхностью ЛА профилированной спойлерной щели;
на фиг.1б - вариант расположения АЯУ на шарнирном складном манипуляторе с образованием подвесной уздечки;
на фиг.2а - вариант выполнения ГЭ в виде леера привязного аэростатического носителя;
на фиг.2б - вариант выполнения ГЭ в виде леера привязного аэродинамического носителя;
на фиг.3а - вариант выполнения ГЭ в виде участка троса тросо-блочной системы, подвешенной под привязным аэростатическим носителем;
на фиг.3б - вариант выполнения ГЭ в виде оттяжного троса с тарированным усилием крепления к месту базирования привязного аэростатического носителя;
на фиг.5, 6 и 7 - варианты выполнения ГЭ в виде гибких фалов с дополнительными АЯУ на свободных концах, подвешенных под самоходными летательными аппаратами-носителями в виде соответственно дирижабля, вертолета и самолета;
на фиг.8 - вариант расположения 2-х АЯУ на законцовках крыла ЛА;
на фиг.9а - вариант расположения АЯУ на складном манипуляторе с выполнением аэродинамического носителя фала в виде передних флюгерирующих крылышек ЛА, выборочно функционирующих по аэродинамической схеме «утка»;
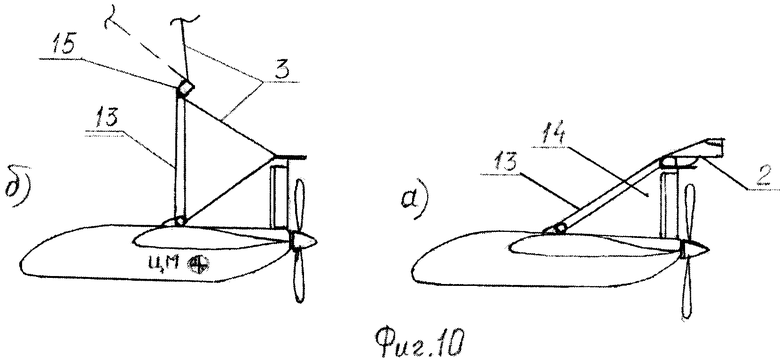
на фиг.10а - вариант расположения АЯУ на хвостовом оперении ЛА с выполнением складного манипулятора в виде части оперения;
на фиг.10б - схема образования уздечки из манипулятора и фала в процессе посадки ЛА;
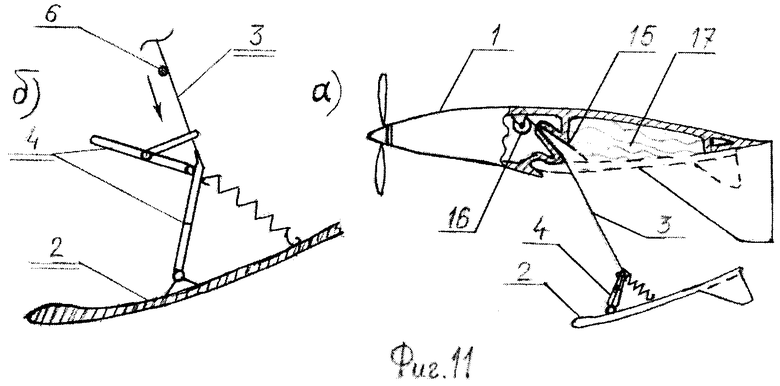
на фиг.11а - вариант выполнения АЯУ на базе крышки парашютного отсека, расположенного снизу ЛА;
на фиг.11б - схема раскрытия замка АЯУ и стабилизации его носителя в процессе разворачивания.
Взлетно-посадочная система содержит растянутый в вертикальной плоскости ГЭ в виде, например, оборудованного силовым приводом подъемного участка троса 6 привязного аэростата 9 (фиг.3). Для взаимодействия с тросом 6 ЛА 1 оборудован АЯУ, содержащим смотанный на бортовую лебедку 16 ЛА захватный фал 3 с аэродинамическим носителем 2, выполненным, например, в виде крышки парашютного отсека с замком 4, которые в снаряженном состоянии пристыкованы к ЛА посредством его стыковочного узла с ложементом 15, а фал 3 при этом проходит через направляющий элемент ложемента 15 и соединяет ЛА с замком 4 и аэродинамическим носителем 2 (фиг.1a, 11а и 11б).
Ложемент стыковочного узла 5 позиционирует положение замка 4 и аэродинамического носителя 2 относительно, например, крыла в месте его сочленения с фюзеляжем таким образом, что аэродинамические поверхности носителя 2 над крылом 1 образуют с ним профилированную щель со спойлерным эффектом (фиг.1а).
Ложемент может быть снабжен дополнительным направляющим элементом для фала и установлен на свободный конец, например, складного манипулятора 13, шарнирно установленного на ЛА, при этом манипулятор совместно с фалом образуют над центром масс ЛА подвесную треугольную уздечку, которая позиционирует подвес ЛА с горизонтальным положением его продольной оси (фиг.9б, 9в и 10б).
Аэродинамические поверхности носителя АУЯ могут быть выполнены в виде крылышек, которые в пристыкованном положении АЯУ могут выборочно функционировать дополнительными передними крыльевыми поверхностями ЛА: в его крейсерском полете с пристыкованным АЯУ они могут, например, свободно флюгерировать (фиг.9а), а для минимизации скорости полета ЛА путем затягивания срывного режима на максимальных углах атаки крыла крылышки могут управляемо увеличивать свои углы атаки с опцией дополнительных рулей для стабилизации полета ЛА по типу аэродинамической схемы «утка» (фиг.9б). Аналогичным образом крылышки АЯУ, установленного, например, на хвостовом оперении ЛА, могут также выборочно способствовать минимизации скорости полета ЛА в качестве дополнительных аэродинамических рулевых поверхностей (фиг.10). В процессе разворачивания фала 3 и посадки ЛА на ГЭ манипулятор 13 совместно с фалом 3 также образует над центром масс ЛА треугольную уздечку для его горизонтального подвеса (фиг.9б, 9в и 106).
Взлетно-посадочная система для ЛА работает следующим образом. Для осуществления взлета летательный аппарат 1 подготавливливают, например, на площадке базирования привязного аэростата 9, оборудованного силовым приводом для подъема ГЭ в виде участка троса 6 с упорным узлом, например, в виде аэродинамического элемента типа парафойла для разворачивания подъемного троса 6 в боковом направлении относительно направления ветра (фиг.3а, 4а и 4в). От стыковочного узла ЛА отстыковывают аэродинамический носитель 2 и замок 4, разворачивают его захватный фал 3 и посредством замка АЯУ зацепляют фал за подъемный трос 6, или за его упорный узел, после чего включают привод и начинают подъем троса 6, который соответственно поднимает АЯУ и полностью разворачивают фал 3 с борта ЛА. После этого на подвесе натянутого фала начинают подъем сбалансированного в горизонтальном положении ЛА, который переводят в привязной режим криволинейного полета с постепенным разгоном при помощи, например, возбуждения колебательного раскачивания подвески ЛА и включения его собственного движителя (фиг.4а и 4г). По мере подъема ЛА на высоту и набора скорости привязного полета, необходимых для перехода в свободный полет, отцепляют фал 3 от подъемного троса 6 и переводят ЛА в свободный полет (фиг.4в и 4г), где сворачивают фал на борт ЛА и пристыковывают к нему АЯУ (фиг.4д).
Для осуществления посадки полетную траекторию ЛА нацеливают на подвешенный под привязным аэростатом 9 и растянутый в вертикальной плоскости трос 6, отстыковывают от ЛА аэродинамическое якорное устройство, разворачивают его захватный фал 3 в боковом относительно продольной оси ЛА направлении и перекрестно наводят фал 3 на участок троса 6, осуществляют их перехлестывание и взаимное проскальзывание, вследствии чего зацепляют замком 4 АЯУ за трос 6 и производят торможение ЛА в режиме привязного полета по криволинейным траекториям, результате чего ЛА подвешивают под аэростатом на связке фала и троса для последующего послеполетного обслуживания (фиг.3).
Такое обслуживание ЛА, например, подзарядка аккумуляторов или дозаправка топливом может осуществляться непосредственно на высоте зависания ЛА, достаточной для его повторного запуска отцеплением АЯУ от троса 6 и переводом в свободный полет с разгоном на снижении (фиг.4в). Перед отцеплением ЛА его разгон может осуществляться в привязном режиме движения по криволинейным траекториям, например, маятникового раскачивания, или кругового полета, после чего ЛА переводят в свободный полет с минимальным снижением (фиг.4а, 4г и 4д).
Аналогичным образом может осуществляться посадка, обслуживание и последующий запуск ЛА с АЯУ посредством гибкого элемента в виде фала 6, подвешенного под самоходным ЛА-носителем и разворачиваемого из него в полете с помощью дополнительного АЯУ 12 (фиг.5, 6б и 7). Посадка ЛА на фал 6 более скоростного по сравнению с ним носителя в виде самолета или вертолета может осуществляться перекрестным наведением фала 6 транспортного ЛА на фал 3 садящегося ЛА при обгоне его носителями в виде самолета или вертолета (фиг.6а и 7а), при этом после зацепления за фал 6 ЛА переводят в привязной буксируемый режим полета и транспортирования (фиг.7в).
Таким образом, предлагаемые способы безаэродромной посадки ЛА, его безаэродромного взлета и взлетно-посадочная система для осуществления этих способов позволяют повысить надежность взлета и посадки летательных аппаратов при снижении перегрузок и требований к точности наведения ЛА без формирования посадочной глиссады, повысить мобильность базирования такой взлетно-посадочной системы. Одновременно это позволит повысить универсальность применения предлагаемых технологий и расширить перспективы применения летательных аппаратов различных типов, например беспилотных ЛА, при этом упрощается конструкция наземного и бортового оборудования со снижением затрат на его производство и эксплуатацию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОДВИЖИТЕЛЕМ И ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2014 |
|
RU2592963C2 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА И ПАРАШЮТНАЯ СИСТЕМА ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА | 2014 |
|
RU2592961C2 |
| Способ парашютной посадки беспилотных самолетов и беспилотный самолет с системой парашютной посадки | 2023 |
|
RU2834660C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2020 |
|
RU2754278C1 |
| ИГРОВОЙ НАБОР "САМОЛЕТ-ШТУРМОВИК" | 1991 |
|
RU2024278C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2021 |
|
RU2771536C1 |
| Беспилотный летательный аппарат - перехватчик | 2018 |
|
RU2669904C1 |
| УСТРОЙСТВО ДЛЯ ИНТЕРАКТИВНОГО ВИЗУАЛЬНОГО МОНИТОРИНГА | 2012 |
|
RU2515712C2 |




Группа изобретений относится к области эксплуатации летательных аппаратов (ЛА). Взлетно-посадочная система для ЛА содержит захватное устройство с замком в виде якорного устройства (ЯУ) со смотанным на бортовую лебедку летательного аппарата (ЛА) захватным фалом, оборудованным замком для гибкого элемента (ГЭ) и аэродинамическим носителем, установленными на ЛА. Захватный фал проходит через направляющий элемент, стыковочный узел и концом соединен с замком и аэродинамическим носителем. Способ посадки ЛА включает нацеливание полетной траектории на растянутый в вертикальной плоскости гибкий элемент, который подвешивают под привязным или автономным летательным аппаратом. Способ взлета ЛА включает вывод фала, зацепление замком за ГЭ, включение привода на подъем, разворачивание фала, подъем ЛА на связке с ГЭ и фала на высоту запуска. Группа изобретений направлена на обеспечение безаэродромной посадки при упрощении процесса наведения без посадочной глиссады и снижении перегрузок, а также на обеспечение взлета без просадки и перегрузок. 3 н. и 44 з.п. ф-лы, 11 ил.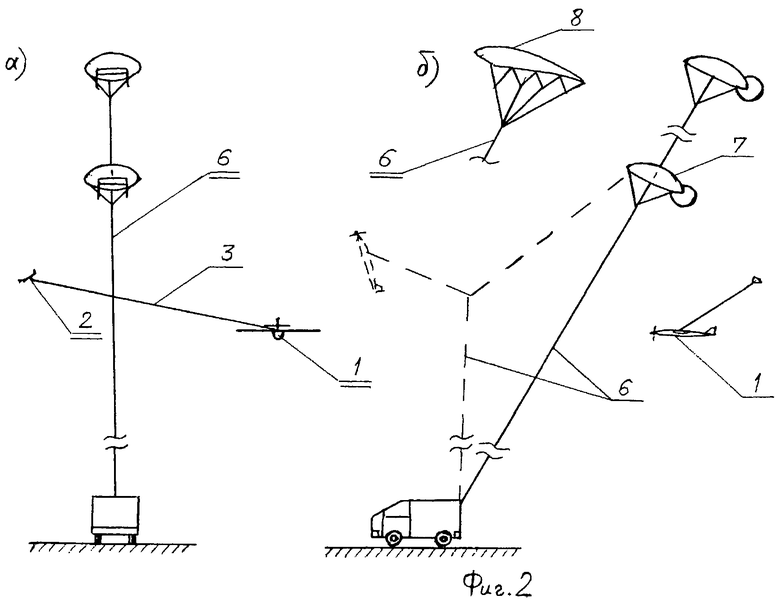
1. Способ посадки летательного аппарата (ЛА) посредством посадочной системы, включающий наведение посадочной траектории ЛА на растянутый в вертикальной плоскости гибкий элемент (ГЭ) посадочной системы, с которого выводят якорное устройство (ЯУ) с замком на захватном фале и производят с помощью него захват ГЭ путем перехлестывания и их взаимного проскальзывания с последующим зацеплением ГЭ замком ЯУ, после чего ЛА тормозят в привязном режиме, отличающийся тем, что ЯУ на захватном фале выводят из ЛА в воздушный поток и с помощью аэродинамического носителя осуществляют разворачивание фала в боковом направлении относительно продольной оси ЛА в режиме аэродинамического буксирования им носителя ЯУ, при этом в процессе захвата фалом ГЭ стабилизируют их взаимное проскальзывание и зацепление с помощью связки ЛА с аэродинамическим носителем, после чего ЛА тормозят в привязном режиме полета и переводят в зависание на подвеске фала и ГЭ с последующим послепосадочным обслуживанием ЛА.
2. Способ посадки ЛА по п.1, отличающийся тем, что в процессе захвата фалом ГЭ полетную траекторию ЛА переводят в вираж в боковую сторону, противоположную стороне разворачивания захватного фала, при этом торможение ЛА осуществляют в режиме привязного полета со снижением по спиралевидной траектории.
3. Способ посадки ЛА по п.1, отличающийся тем, что разворачивание захватного фала с аэродинамическим якорным устройством (АЯУ) осуществляют в верхней или нижней полусфере относительно ЛА.
4. Способ посадки ЛА по п.1, отличающийся тем, что отделение АЯУ от ЛА может осуществляться путем трансформации участка поверхности ЛА в аэродинамические поверхности носителя якорного устройства с возможностью их обратной трансформации.
5. Способ посадки ЛА по п.1, отличающийся тем, что в аэродинамические поверхности носителя трансформируют крышку парашютного отсека ЛА, при этом отделение и раскрытие парашюта производят по отдельной команде после разворачивания АЯУ, причем наведение фала производят мимо ГЭ.
6. Способ посадки ЛА по п.1, отличающийся тем, что отделение от ЛА и отвод носителя АЯУ в воздушный поток производят посредством складного манипулятора.
7. Способ посадки ЛА по п.1, отличающийся тем, что первоначальное разворачивание захватного фала может производиться вверх над ЛА, с последующим переводом его перед наведением на ГЭ в боковое положение относительно продольной оси ЛА.
8. Способ посадки ЛА по п.1, отличающийся тем, что в качестве ГЭ используют привязной леер аэростатического или аэродинамического носителя.
9. Способ посадки ЛА по п.1, отличающийся тем, что в качестве ГЭ используют одну из ветвей трособлочной системы, подвешенной под привязным аэростатическим или аэродинамическим носителем и подключенной к силовому приводу.
10. Способ посадки ЛА по п.9, отличающийся тем, что в процессе захвата фалом ГЭ производят подъем последнего.
11. Способ посадки ЛА по п.1, отличающийся тем, что в процессе захвата фалом ГЭ летательный аппарат переводят в набор высоты с переходом в круговой привязной полет с торможением при снижении по спиралевидной траектории или с торможением ЛА в режиме маятниковых затухающих качаний на подвеске фала и ГЭ.
12. Способ посадки ЛА по п.1, отличающийся тем, что разгон ЛА в режиме привязного полета на подвеске фала осуществляют путем чередования маятникового раскачивания ЛА с переходом его в круговой полет.
13. Способ посадки ЛА по п.1, отличающийся тем, что осуществляют посадку ЛА на ГЭ, который разворачивают в полете из транспортного ЛА в качестве другого АЯУ.
14. Способ посадки ЛА по п.13, отличающийся тем, что осуществляют посадку ЛА на ГЭ транспортного ЛА, имеющего более высокую скорость полета, чем садящийся ЛА, при этом производят наведение ГЭ транспортного ЛА на захватный фал садящегося ЛА в процессе обгона последнего транспортным, причем после зацепления ГЭ с фалом садящийся ЛА переводят в режим буксирного полета за транспортным ЛА.
15. Способ посадки ЛА по п.1, отличающийся тем, что в процессе посадки ЛА осуществляют разворачивание двух захватных фалов с двумя АЯУ в противоположных боковых направлениях относительно продольной оси ЛА.
16. Способ посадки ЛА по п.1, отличающийся тем, что в процессе посадки ЛА после зацепления его фала за ГЭ летательный аппарат переводят в режим парашютирования.
17. Способ посадки ЛА по п.1, отличающийся тем, что посадку ЛА на ГЭ производят на высоте, достаточной для осуществления запуска ЛА, путем отцепления АЯУ от ГЭ и перевода ЛА в разгон на снижении до скорости горизонтального полета.
18. Способ посадки ЛА по п.1, отличающийся тем, что посадка ЛА на ГЭ осуществляют на высоте, достаточной для перевода зацепленного ЛА в режим кругового моторного привязного полета с достаточной для этого скоростью.
19. Способ посадки ЛА по п.17, отличающийся тем, что в режиме зависания ЛА на ГЭ и фале их используют в качестве конструкционных коммуникаций для соединения ЛА с системами его обслуживания.
20. Способ посадки ЛА по п.19, отличающийся тем, что в режиме зависания ЛА соединяют с зарядной электрической системой или дозаправочной топливной системой.
21. Способ посадки ЛА по п.1, отличающийся тем, что посадку ЛА осуществляют с наведением захватного фала на ГЭ с помощью системы спутниковой навигации, элементы ориентации которой устанавливают на ЛА и АЯУ.
22. Способ посадки ЛА по п.1, отличающийся тем, что наведение захватного фала на ГЭ осуществляют с помощью радиолокационной системы наведения, локатор которой размещают вдоль посадочной траектории ЛА позади ГЭ и корректируют взаимоположение ГЭ и связки ЛА с АЯУ.
23. Способ посадки ЛА по п.1, отличающийся тем, что в процессе посадки ЛА осуществляют развертывание с помощью АЯУ антенного устройства бортового приемника системы наведения, посредством которого в процессе наведения связки ЛА с АЯУ на ГЭ принимают сигналы установленного на нем излучателя и ориентируют параллельные полетные траектории Л А и АЯУ с расположением ГЭ между ними.
24. Способ взлета ЛА с помощью взлетной системы с растянутым в вертикальной плоскости гибким элементом (ГЭ), включающий зацепление ЛА за ГЭ и подъем посредством последнего на высоту взлета, где ЛА отцепляют от ГЭ и запускают в свободный полет, отличающийся тем, что за ГЭ зацепляют замок якорного устройства (ЯУ), соединенный с ЛА захватным фалом, посредством которого в связке с ГЭ поднимают ЛА на высоту взлета, при этом в процессе подъема ЛА переводят в режим привязного полета, причем после отцепления ЛА в процессе его перехода в свободный полет фал сворачивают на борт ЛА в режиме буксирования им ЯУ и осуществляют стыковку последнего с ЛА.
25. Способ взлета ЛА по п.24, отличающийся тем, что якорное устройство с фалом оборудовано аэродинамическим носителем, посредством которого сворачивание фала производят в режиме аэродинамического буксирования ЯУ с помощью ЛА.
26. Способ взлета ЛА по п.24, отличающийся тем, что разворачивание фала с подготовленного к запуску ЛА и его подъем на подвеске осуществляют в режиме ускоренного подъема наклонного ГЭ с включенным движителем ЛА, который в процессе отцепления от ГЭ переводят в режим криволинейного полета.
27. Способ взлета ЛА по п.24, отличающийся тем, что режим привязного полета ЛА на подвеске осуществляют по круговым траекториям с приводом от движителя ЛА.
28. Способ взлета ЛА по п.24, отличающийся тем, что процесс подъема подвески ЛА осуществляют с постепенным его разгоном в режиме маятникового раскачивания на подвеске, инициированным путем придания продольных колебаний гибкому элементу, которые преобразуют в увеличение амплитуды маятниковых раскачиваний ЛА на связке.
29. Способ взлета ЛА по п.24, отличающийся тем, что разгон ЛА в режиме привязного полета на подвеске фала осуществляют путем чередования маятникового раскачивания ЛА с переходом в круговой полет.
30. Способ взлета ЛА по п.24, отличающийся тем, что подъем и буксирование ЛА на связке ГЭ с фалом осуществляют с помощью транспортного ЛА, при этом отцепление фала от ГЭ производят при переводе ЛА в снижение.
31. Способ взлета ЛА по п.24, отличающийся тем, что стыковка аэродинамического ЯУ (АЯУ) с ЛА в свободном полете осуществляют посредством складного манипулятора, который совместно с АЯУ используют в качестве регулируемого антенного устройства.
32. Способ взлета ЛА по п.24, отличающийся тем, что стыковку АЯУ с ЛА осуществляют над местом сочленения крыла и фюзеляжа с образованием профилированной щели, при этом аэродинамические поверхности носителя ЯУ используют в качестве управляемого спойлера, с помощью которого оптимизируют аэродинамическую интерференцию крыла.
33. Способ взлета ЛА по п.24, отличающийся тем, что стыковка АЯУ с ЛА осуществляют в его передней части, при этом аэродинамические поверхности ЯУ используют в качестве передних крыльев аэродинамической схемы «утка», причем в крейсерском полете крылья переводят во флюгерирующий режим, а для снижения скорости полета ЛА крылья переводят в режим управления их углом атаки.
34. Способ взлета ЛА по п.24, отличающийся тем, что стыковка АЯУ осуществляют с хвостовым оперением ЛА, при этом с помощью аэродинамических поверхностей АЯУ осуществляют триммирование в управлении ЛА.
35. Взлетно-посадочная система для ЛА, содержащая растянутый в вертикальной плоскости и снабженный приводом гибкий элемент (ГЭ), для взаимодействия с которым ЛА оборудован захватным устройством с замком, выполненным с возможностью наземного зацепления за ГЭ для подъема ЛА на высоту его запуска там путем отцепления замка, который также имеет возможность автоматического зацепления за ГЭ при посадке ЛА путем полетного наведения захватного устройства на ГЭ, отличающаяся тем, что захватное устройство выполнено в виде якорного устройства (ЯУ) со смотанным на бортовую лебедку ЛА захватным фалом, оборудованным замком для ГЭ и аэродинамическим носителем, разъемно установленными на ЛА посредством стыковочного узла, при этом захватный фал проходит через направляющий элемент, стыковочный узел и свободным концом соединен с замком и аэродинамическим носителем.
36. Взлетно-посадочная система по п.35, отличающаяся тем, что аэродинамические поверхности носителя ЯУ выполнены автоматически или дистанционно управляемыми.
37. Взлетно-посадочная система по п.35, отличающаяся тем, что аэродинамические поверхности носителя выполнены трансформируемыми из участков поверхности ЛА с возможностью обратной трансформации.
38. Взлетно-посадочная система по п.35, отличающаяся тем, что замок АЯУ выполнен автоматически или дистанционно управляемым.
39. Взлетно-посадочная система по п.35, отличающаяся тем, что стыковочный узел ЛА выполнен в виде ложемента позиционирования замка и аэродинамических поверхностей носителя относительно ЛА с образованием между аэродинамическими поверхностями носителя и поверхностью ЛА профилированной спойлерной щели.
40. Взлетно-посадочная система по п.35, отличающаяся тем, что стыковочный узел и АЯУ установлены на верхней или на нижней поверхности ЛА.
41. Взлетно-посадочная система по п.35, отличающаяся тем, что ложемент для замка АЯУ снабжен дополнительным направляющим элементом для фала и установлен на свободном конце шарнирно установленного на ЛА складного манипулятора с образованием совместно с фалом над центром масс ЛА подвесной треугольной уздечки, при этом уздечка позиционирует подвес ЛА с горизонтальным положением его продольной оси.
42. Взлетно-посадочная система по п.35, отличающаяся тем, что ложемент манипулятора может быть установлен в передней или задней части ЛА.
43. Взлетно-посадочная система по п.35, отличающаяся тем, что ложемент установлен на хвостовое оперение ЛА и снабжен дополнительным направляющим элементом, выполненным с возможностью освобождения фала, при этом захватный фал проходит через расположенный над центром масс ЛА его направляющий элемент.
44. Взлетно-посадочная система по п.35, отличающаяся тем, что ЛА оборудован двумя АЯУ, ложементы для замков которых установлены на концевых частях крыла, а два захватных фала проходят внутри консолей крыла, при этом направляющие элементы фалов расположены на ложементах.
45. Взлетно-посадочная система по п.35, отличающаяся тем, что ГЭ выполнен виде леера привязного ЛА, при этом ГЭ соединяет его снизу с неподвижной или подвижной платформой.
46. Взлетно-посадочная система по п.35, отличающаяся тем, что ГЭ подвешен под привязным ЛА, при этом на нижнем свободном конце ГЭ установлено дополнительное якорное устройство с управляемым замком.
47. Взлетно-посадочная система по п.35, отличающаяся тем, что ГЭ подвешен под самоходным ЛА, при этом на его нижнем свободном конце установлен дополнительный АЯУ с управляемым замком.
| СПОСОБЫ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2270786C2 |
| US 7264204 A, 04.09.2007 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

