Настоящее изобретение относится к области радиолокации и может быть использовано для определения параметров наземных препятствий (удаления, азимута, высоты) с помощью радиолокационных средств, установленных на борту летательного аппарата, при полете на малых и предельно малых высотах.
Существующие экспериментальные образцы бортовых радиолокационных станций (БРЛС) МВП (см. , например, [1]) позволяют осуществить, помимо обнаружения наземных объектов, также оценку параметров наземных радиоконтрастных препятствий без оценки их высоты, что не позволяет оценить степень их опасности полету и прогнозировать высоту их облета на прогнозируемых интервалах времени. Последнее не позволяет прогнозировать траекторию полета ЛА (осуществлять его маловысотный полет) при наличии препятствий на определенный интервал времени, особенно в условиях ограниченной видимости, что особенно важно для решения задачи предупреждения о препятствиях в вертолетной авиации, для беспилотных летательных аппаратов и т.д. Между тем, предупреждение о препятствиях и оценка высоты последних является важным фактором обеспечения безопасности маловысотного полета (МВП), в том числе в режиме полуавтоматического пилотирования ЛА.
Известна БРЛС [2], использующая способ доплеровского обужения луча (ДОЛ) [3] для оценки угловых координат и удаления наземных целей с помощью гребенки узкополосных доплеровских фильтров. Сущность этого способа заключается в дальномерно-доплеровской обработке информации в БРЛС, при которой угловое положение наземной цели определяется как угловое положение точки пересечения i-й изодопы и j-й изодали, в которой находится наземная цель [3]. При этом изодопы в элементе разрешения по дальности располагаются по линии азимута, а изодали в каждом элементе разрешения по скорости - по линии тангажа (углу места). Тогда процедура оценки азимутального положения цели βi относительно линии полета состоит в решении уравнения (см. фиг. 1):
где Vн -скорость полета носителя в горизонтальной плоскости;
λ - длина волны передатчика БРЛС; доплеровская частота по i-й изодопе;
доплеровская частота по i-й изодопе;
Dj - дальность по i-й изодали;
αij - - угол визирования цели в вертикальной плоскости в направлении i-й изодопы и j-й изодали.
Исходя из соотношения (1), процедура оценки угловой координаты наземного радиоконтрастного объекта в угломестной плоскости заключается в выполнении следующих операций: стробировании приемного устройства БРЛС по дальности; оценке доплеровской частоты обнаруженных целей в каждом элементе дальности; оценке угловых координат обнаруженных наземных целей по номеру элемента дальности и доплеровской частоте сигнала в этом элементе.
Однако точность описанной в [2[ БРЛС при оценке размеров наземных целей, в том числе препятствий, недостаточно высока для оценки высоты препятствий и определяется также шириной луча сканируемой ДНА БРЛС. При сужении ДНА точность оценки размеров наземных препятствий увеличивается; однако при этом резко возрастает время осмотра зоны, в пределах которой индицируется наличие возможных препятствий и оцениваются их размеры. В силу последнего фактора поставленная задача не решается и в случае использования лазерных дальномеров, угловая расходимость луча которых достигает нескольких угловых минут. При этом возможна достаточно точная оценка угловых координат и дальности до верхней кромки препятствия по линии полета ЛА (до n•1 угл. минут, n•1 м соответственно в благоприятных погодных условиях). Однако время, требуемое для обнаружения наземного препятствия, недопустимо велико, что исключает использование в ЛА лазерных локаторов для решения рассматриваемой задачи.
Следовательно, способ ДОЛ, в классическом своем выражении, позволяя оценивать угловые координаты наземных целей, в том числе и препятствий, и удаление до них не позволяет производить оценку высоты препятствий.
Задачей настоящего изобретения является определение параметров препятствий по линии полета летательного аппарата в пределах некоторой зоны ответственности, в том числе и высоты препятствий.
Поставленная задача достигается путем формирования "лопатообразной" диаграммы направленности антенны (ДНА) БРЛС в вертикальной (угломестной) плоскости и "игольчатой" - в горизонтальной (азимутальной) плоскости с использованием многоканальной доплеровской обработки сигнала и реализации способа ДОЛ в угломестной плоскости.
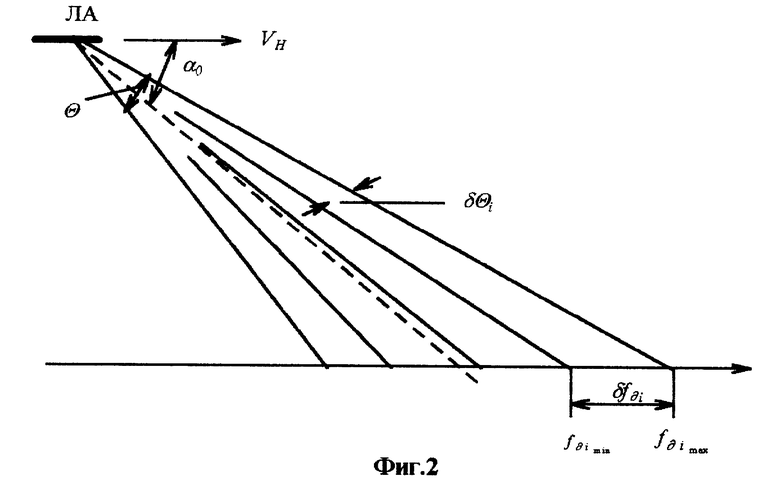
При этом ДНА в горизонтальной плоскости сориентирована так, чтобы ее ось была направлена по линии полета ЛА (или осуществляла сканирование в некотором секторе ±δβ относительно вектора скорости  ЛА); в вертикальной плоскости равносигнальное направление (PCH) ДНА зафиксировано и отклонено на угол α0 относительно линии полета ЛП, как это изображено на фиг. 2.
ЛА); в вертикальной плоскости равносигнальное направление (PCH) ДНА зафиксировано и отклонено на угол α0 относительно линии полета ЛП, как это изображено на фиг. 2.
При этом расстояние до наземного радиоконтрастного препятствия определяется по номеру канала дальности, в котором произошло его обнаружение, а высота - по количеству доплеровских фильтров, в которых произошло обнаружение препятствия (препятствий), и углу α0, соответствующему ориентации РСН антенны в вертикальной плоскости.
На фиг. 1 представлена иллюстрация возможности измерения координат наземных объектов с помощью режима ДОЛ; на фиг. 2 - эффект сужения ДНА при использовании режима ДОЛ; на фиг. 3 - принцип оценки высоты наземных препятствий при использовании режима ДОЛ; на фиг. 4 - частотный спектр отражений в пределах ДНА по углу места (тангажу); на фиг. 5 - структурная схема канала обнаружения и оценки координат наземных объектов; на фиг. 6 и 7 - эффективность предлагаемого изобретения.
Сущность изобретения состоит в излучении и приеме радиолокационных сигналов с помощью антенны, имеющую "лопатообразную" диаграмму направленности в вертикальной плоскости и игольчатую - в горизонтальной плоскости, ориентированную по направлению вектора скорости полета летательного аппарата, осуществляющую сканирование по азимуту в пределах некоторого углового сектора. Принятый сигнал подвергают дальномерно-доплеровской обработке, например, с помощью стробирования приемника РЛС по дальности и узкополосной доплеровской фильтрации, в результате чего реализуется эффект доплеровского обужения луча в угломестной плоскости. Затем с помощью методов пороговой обработки осуществляют выделение участков доплеровского спектра, соответствующего отражением от наземных объектов в каждом канале дальности, протяженность которых характеризует высоту наземного объекта, например высоту препятствия, а угол отворота антенны на объект - азимут объекта. Удаление до объекта определяется по номеру канала дальности, где произошло его обнаружение.
Применение доплеровского обужения луча в вертикальной плоскости позволяет искусственно разбить ДНА в вертикальной плоскости на ряд секторов шириной δΘi, каждый из которых соответствует некоторой полосе  доплеровских частот сигнала, отраженного от определенного участка подстилающей поверхности, что иллюстрируется фиг. 2.
доплеровских частот сигнала, отраженного от определенного участка подстилающей поверхности, что иллюстрируется фиг. 2.
На фиг. 2: Vн - скорость носителя (ЛА); α0 - - положение РСН антенны в вертикальной плоскости.
Число таких секторов и их угловой размер определяются полосой ΔFф пропускания доплеровского фильтра, шириной Θ ДНА БРЛС, скоростью Vн полета ЛА, длиной λ волны передатчика БРЛС и т.д.
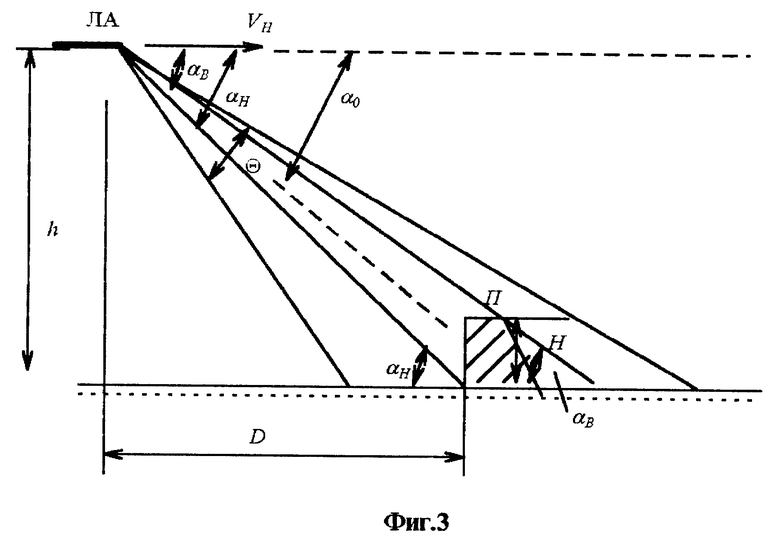
Сущность предлагаемого изобретения иллюстрируется фиг. 3.
На фиг. 3: h - высота полета ЛА над подстилающей поверхностью; П - радиоконтрастное препятствие высотой H; α0 - - угол визирования ДНА в вертикальной плоскости; Vн -скорость полета ЛА; αв,αн - - углы видимости верхней и нижней кромок препятствия; D - удаление препятствия относительно ЛА;
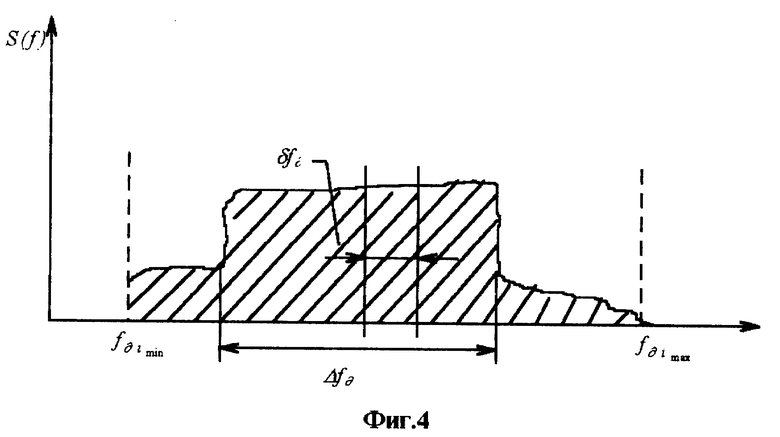
Соответственно фиг. 3, спектр доплеровских частот в пределах угла Θ, отраженных от подстилающей поверхности, включая препятствие, имеет вид фиг. 4.
f∂min f∂max - доплеровские частоты, соответствующие положению нижней и верхней кромок луча ДНА шириной Θ;  участок спектра доплеровских частот, соответствующий полосе доплеровского фильтра; Δf∂ - ширина участка спектра доплеровских частот сигнала, отраженного от радиоконтрастного препятствия.
участок спектра доплеровских частот, соответствующий полосе доплеровского фильтра; Δf∂ - ширина участка спектра доплеровских частот сигнала, отраженного от радиоконтрастного препятствия.
Величина Δf∂, исходя из фиг. 3, определяется соотношением
Выражая (2) через известные (или замеряемые) параметры полета ЛА, можно получить;
Тогда высота H препятствия оценивается в соответствии со следующим соотношением:
Т. е. ширина спектра доплеровских частот сигнала, отраженного от препятствия, зависит только от неизвестной величины H высоты препятствия при известных (или измеряемых) параметрах полета ЛА.
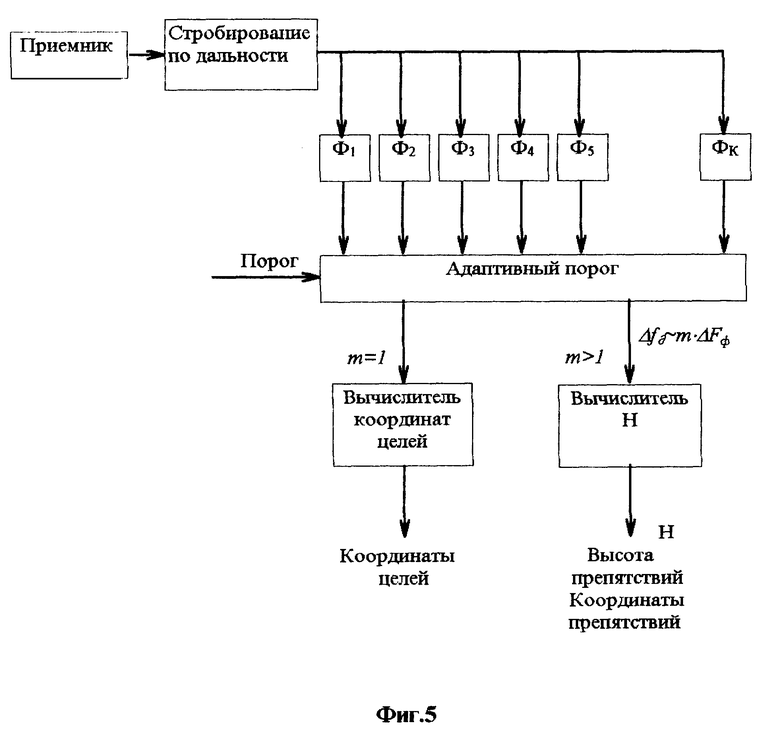
Сама величина Δf∂ определяется по выходу адаптивного обнаружителя, основанного, например, на принципе одно- или двухстороннего детектора (например, [4] ), содержащего К доплеровских цифровых фильтров, каждый из которых имеет полосу ΔFф. Количество m подряд следующих фильтров, в которых произошло обнаружение сигнала, прямо пропорционально высоте H препятствия. Случай m=1 соответствует либо одиночной наземной цели, либо препятствию, имеющему небольшую высоту; случай m>1, особенно при малых значениях угла α0, соответствует большой высоте препятствия.
Структурная схема радиолокационного канала, позволяющего обнаруживать наземные цели и оценивать их координаты, а также обнаруживать наземные препятствия, оценивать их координаты и высоту, представлена на фиг. 5.
На фиг. 5 Ф1, Ф2...,Фк - гребенка, состоящая из К узкополосных доплеровских фильтров.
Сигнал с выхода приемника в каждом канале дальности, охватывающим зону ответственности БРЛС, фильтруется К доплеровскими цифровыми фильтрами (реализуемыми, например, в процессоре ЦОС) с разрешающей способностью  в общем случае одинаковой для всех каналов.
в общем случае одинаковой для всех каналов.
Величина адаптивного порога изменяется в зависимости от уровня фона отражений от поверхности земли. В результате пороговой обработки выделяется участок (или участки) спектра доплеровских частот, соответствующий отражениям от препятствий, представляющих опасность для полета (случай m>1), или одиночных наземных целей (m=1), находящихся в пределах ширины Θ ДНА БРЛС. Вычислитель H осуществляет фиксацию числа m смежных фильтров Фj...Фj+m+1) (при m>1) и вычисление высоты H препятствия (или препятствий). Вычислитель координат целей реагирует только на ситуации, когда m=1 и производит оценку дальности и угловых координат одиночных целей.
При достаточно малых значениях ΔFф(~n•10Гц), α0(~10...15o) случаю m=1 соответствует одиночная цель с высотой n•1м.
Случаю m≥2. . .3 соответствует препятствие с высотой H порядка n•10 м и более (n=1,2...).
Точность оценки σH высоты препятствия зависит от полосы ΔFф доплеровского фильтра, длины λ волны БРЛС, скорости VН полета ЛА, углов αн, αв визирования препятствия и оценивается в соответствии с соотношением
где  среднее, верхнее и нижнее значение положения углового сектора относительно
среднее, верхнее и нижнее значение положения углового сектора относительно  соответствующего j-му доплеровскому фильтру.
соответствующего j-му доплеровскому фильтру.
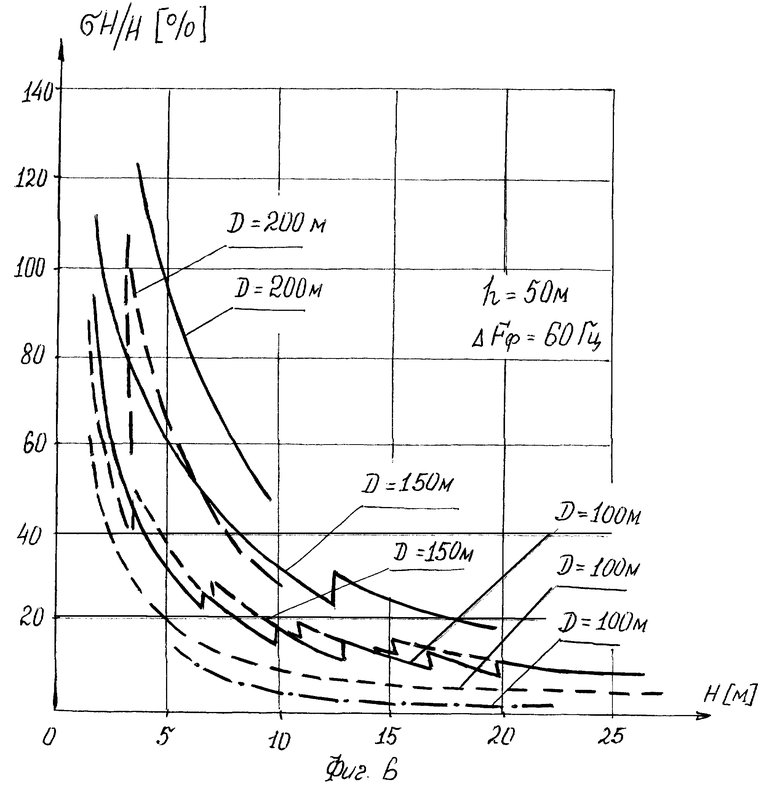
На фиг. 6 представлена экспериментальная зависимость точности σH/H оценки высоты препятствия в зависимости от дальности D до препятствия, скорости VН полета ЛА, высоты H препятствия для λ = 8,6 мм, ΔFф = 60 Гц и h = 50 м и при трех значениях скорости полета ЛА:
VH=25 м/с (сплошные линии), VH=42 м/с (пунктирные линии):
VH=86м/с (штрихпунктирные линии).
Из представленных экспериментальных зависимостей следует, что точность σH/H оценки высоты H препятствия увеличивается с уменьшением дальности D до препятствия, высоты H препятствия, скорости VH ЛА. Полученные результаты соответствуют реальным потребностям при пилотировании ЛА, когда точность оценки высоты H препятствий должна увеличиваться при сближении с препятствием и увеличением скорости сближения с ним.
Скачки зависимостей ∂(σH/H)/∂H на фиг. 6 объясняются дискретностью измерения величины Δf∂ гребенкой узкополосных фильтров с полосой каждого ΔFф, когда сигнал, отраженный от вершины препятствия, переходит из одного доплеровского фильтра в соседний с ним. Эти разрывы в значительной степени устраняются использованием совместной обработки информации в смежных фильтрах гребенки, учитывая, что амплитуда сигнала на выходе j-го узкополосного доплеровского фильтра обратно пропорциональна его расстройке относительно сигнала и максимальна, когда полоса j-го фильтра полностью охватывает j-й участок спектра сигнала.
С уменьшением ΔFф полосы доплеровского фильтра точность σH/H оценки высоты H препятствия также возрастает. Однако при этом увеличивается требуемое время когерентного накопления сигнала при его обнаружении - с одной стороны; в то же время уменьшается реальное время когерентного накопления сигнала - в силу уменьшения времени нахождения сигнала за такт обработки информации в БРЛС в этом фильтре из-за движения ЛА со скоростью VH. Расчеты и моделирование показали, что полет ЛА в диапазоне скоростей 150...280 км/ч при λ = 8,6 мм оптимальное значение ΔFф составляет величину порядка 30...60 Гц. При этом ЛА за такт обработки (~30...мс) пролетает расстояние около 3... 5 м (для приведенных на фиг. 6 условий), что сопоставимо с приведенными на фиг. 6 значениями σ H/H.
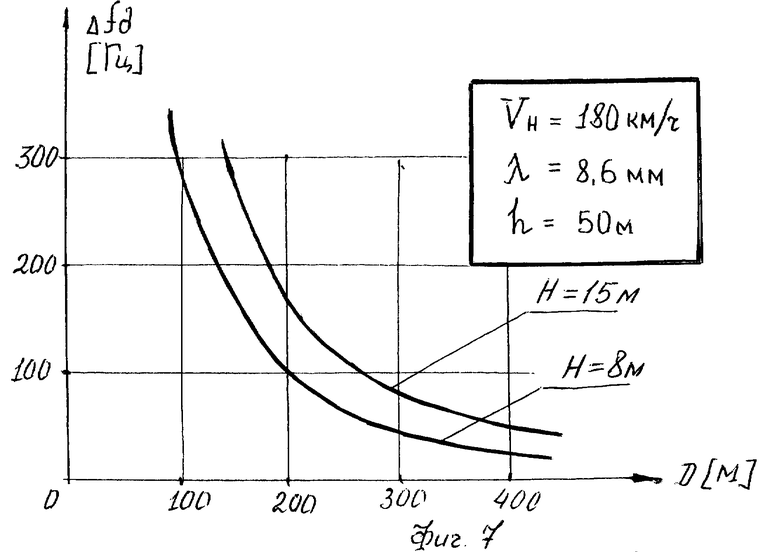
На фиг. 7 приведены зависимости Δf∂ от дальности для двух значений H - 8 м и 15 м, подтверждающие рост точности оценки высоты H препятствия при уменьшении D для фиксированного значения ΔFф.
Источники информации:
1. James H. Hughen, Arleign B.Baker, Daniel J. Sullivan. Demonstration of a SAR Mode for a Lightweight 35 Ghz MMW Radar. - IEEE Trans., 1994, N 7, p.p. 23-28.
2. РЛС с повышенной разрешающей способностью по угловым координатам. - Патент США, N 4903030, МКИ G 01 D 13/72, заявл. 2.07.87., опубл. 20.02.90; НКИ 342/113.
3. Cherwek R.A. Coherent active seeker guidance, concepts for tactical missiles. - "EASCON' 78" Rec. IEEE Electron and Aerospace Syst. Conven., Arligton. Vo. Sept. 25-27, 1978, New York, N.Y., 1978, p.p. 199-202.
4. Э.К.Аль-Хусайни. Особенности работы "минимального" и "максимального" детекторов при интегрировании М-импульсов. - ТИИЭР, 1988, том 76, N 6, стр. 101-102.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОТДЕЛЬНУЮ ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ ЦЕЛЕЙ | 2003 |
|
RU2253082C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ И ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В КОГЕРЕНТНОЙ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2005 |
|
RU2298809C9 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ НАВЕДЕНИЯ САМОЛЕТОВ НА НАЗЕМНЫЕ ЦЕЛИ | 2002 |
|
RU2210801C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ПРЕПЯТСТВИЙ | 2005 |
|
RU2296344C2 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2004 |
|
RU2261411C1 |
Заявлен способ определения параметров наземных радиоконтрастных препятствий (удаления, угловых координат, высоты препятствии) при полете летательных аппаратов на малой высоте, использующий способ доплеровского обужения луча антенны когерентной импульсно-доплеровской РЛС летательного аппарата в угломестной плоскости. При этом удаление и угловые координаты наземного препятствия определяются традиционными для РЛС способами, а высота препятствия - по ширине спектра доплеровских частот сигнала, отраженного от него. Технический результат заключается в том, что заявляемый способ позволяет производить оценку высоты препятствий. 1 з.п.ф-лы, 7 ил.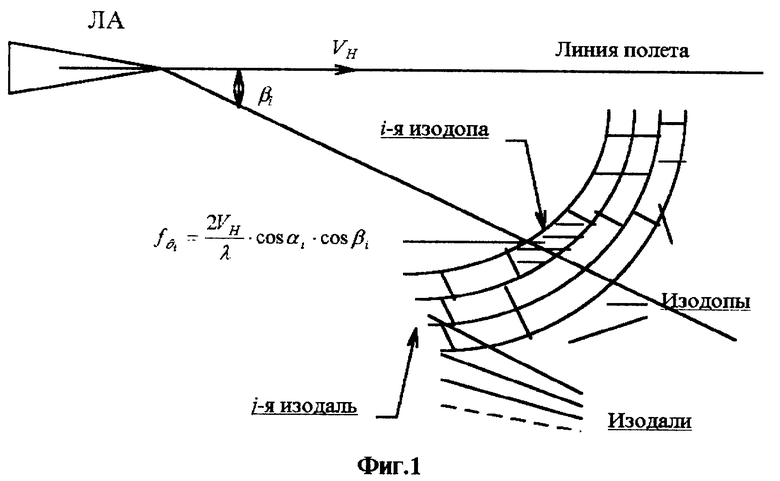
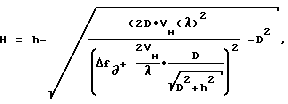
где Vн - скорость полета летательного аппарата;
λ - длина волны РЛС;
h - высота полета летательного аппарата над подстилающей поверхностью,
вычисляют высоту Н наземного препятствия, а по угловому положению антенны в горизонтальной плоскости определяют азимут наземного препятствия.
| US 4903030 A, 20.02.90 | |||
| US 5610609 A, 11.03.97 | |||
| DE 3619369 A, 18.12.86 | |||
| ДВУХПОЗИЦИОННЫЙ ТЕРМОРЕГУЛЯТОР | 0 |
|
SU334560A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ПРОТЯЖЕННОГО ОБЪЕКТА | 1992 |
|
RU2078352C1 |
| Адаптивный фильтр | 1989 |
|
SU1626236A1 |

