Изобретение относится к области разведки движущихся объектов с помощью радиолокационных и электронно-оптических средств, а именно к способам наведения оптического прибора на обнаруженный объект, и может быть использовано в скомплексированных радиолокационно-оптоэлектронных системах при разведке наземных и надводных объектов, а также в системах наблюдения за охраняемой территорией, акваторией в пограничной зоне и др.
Известны автоматизированные радиолокационно-оптоэлектронные комплексы охраны территорий и акваторий, например комплекс "Страж" (см.: Зайцев Н. Российские радары на поле боя и охране рубежей /Военный парад. 1998. № май-июнь, с.61; а также: Современные технические средства охраны морских границ/ Пограничник содружества. 1997. №2, с.54-55).
Комплекс "Страж" обеспечивает автоматическое обнаружение с помощью двухкоординатной радиолокационной станции (РЛС) вторжения нарушителей в охраняемую зону по земле или по воде, а также визуальное наблюдение за обнаруженными объектами, документирование радиолокационной и видеоинформации. Данные на один пульт управления могут поступать от нескольких радиолокационных и телевизионных постов.
Такие комплексы реализуют известный способ наведения оптических средств по данным целеуказания двухкоординатной РЛС.
В состав комплекса входят радиолокационные и оптоэлектронные, например телевизионные посты наблюдения, центральный пульт управления (ЦПУ), программные средства которого обеспечивают формирование на экране видеомонитора радиолокационного изображения наблюдаемого участка, отображение на экране видеомонитора телевизионного изображения, прием и документирование радиолокационной и телевизионной информации, автоматическое наведение оптического средства на выбранный объект в азимутальной плоскости, формирование команд управления и др.
Автоматический поиск и обнаружение объектов производится двухкоординатной РЛС, а распознавание обнаруженных объектов ведется с помощью оптических средств, например телевизионной камеры.
Входящая в состав таких систем двухкоординатная, как правило недорогая, РЛС обеспечивает автоматическое обнаружение объекта-нарушителя в любое время суток, сложных метеоусловиях и определение дальности до объекта и азимута, однако получить точный пеленг в угломестной плоскости с помощью такой РЛС затруднительно (наличие зеркальных отражений от земли и др.).
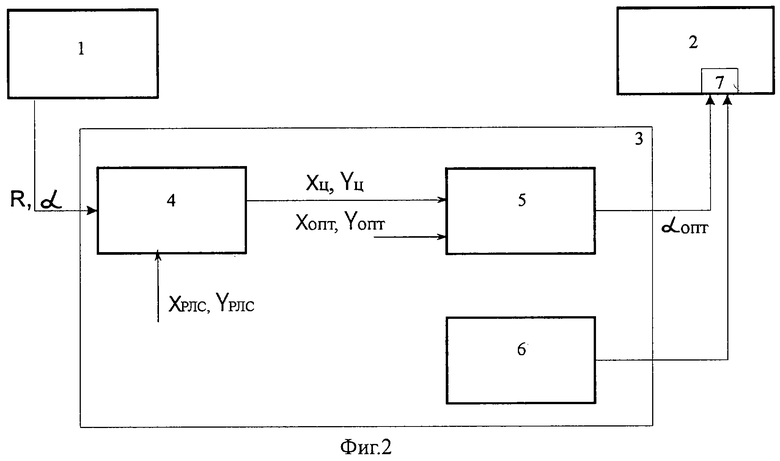
Двухкоординатная РЛС производит автоматическое обнаружение движущихся объектов на фоне подстилающей поверхности. Полярные координаты (R - дальность и α - азимут) поступают на центральный пульт управления ЦПУ. По известным прямоугольным координатам местоположения РЛС (Хрлс, Yрлс) и полярным координатам объекта (R, α) определяются прямоугольные координаты обнаруженного объекта (Хц, Yц). По известным прямоугольным координатам точки местоположения оптического средства (Хопт, Yoпт) и координатам обнаруженного объекта (Хц, Yц) определяется угол визирования αопт в азимутальной плоскости оптического средства на объект. Наведение на объект по азимуту осуществляется в соответствии с полученным значением угла визирования αопт, которое подается на привод оптического средства. Наведение оптического средства, например TV камеры, в угломестной плоскости осуществляется вручную, т.е. окончательное местоположение объекта по углу места приходится определять доводя оптическое средство вручную.
Целью и техническим результатом данного изобретения является обеспечение возможности автоматического наведения оптического прибора по углу места с использованием косвенных данных - высоты земной поверхности над уровнем моря в точках местоположения цели и оптического прибора наблюдения.
Поставленная цель достигается тем, что в отличии от известного способа, по которому по данным радиолокационного обзора двухкоординатной РЛС осуществляют наведение на объект оптического прибора наблюдения по азимуту, предлагается, используя цифровую карту местности, определять высоты земной поверхности над уровнем моря в точках с прямоугольными координатами обнаруженного объекта, измеренными с помощью РЛС, и с известными прямоугольными координатами оптического прибора наблюдения, затем, добавляя к полученным значениям высот над уровнем моря ожидаемую высоту центра обнаруженного объекта и высоту центра объектива оптического прибора над уровнем земли соответственно, автоматически определяют третью координату - угол визирования на объект оптического прибора в вертикальной плоскости и по полученным трехмерным координатам центра объекта и оптического прибора осуществляют автоматическое управление приводом наведения оптического прибора на обнаруженный объект.
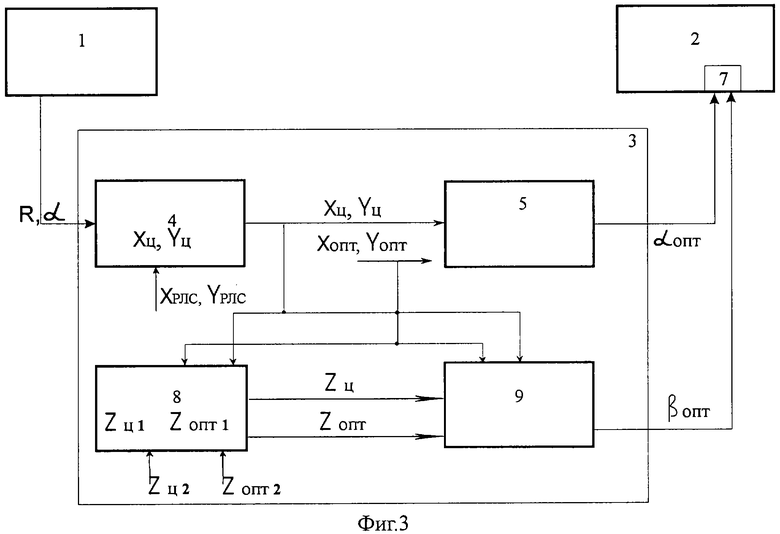
На фиг.1 изображено взаимное расположение средств, входящих в систему, реализующую заявляемый способ: а) в горизонтальной плоскости, б) в вертикальной плоскости; на фиг.2 изображена структурная схема, реализующая известный комплекс "Страж", где 1 - двухкоординатная РЛС, 2 - оптический прибор, 3 - центральный пульт управления (ЦПУ), 4 - устройство определения прямоугольных координат координат объекта в горизонтальном положении, 5 - устройство определения угла визирования по азимуту, 6 - устройство ручного наведения, 7 - привод оптического прибора, на фиг.3 изображена структурная схема, реализующая заявляемый способ, где 1 - двухкоординатная РЛС, 2 - оптический прибор, 3 - ЦПУ, 4 - устройство определения прямоугольных координат координат объекта в горизонтальном положении, 5 - устройство определения угла визирования по азимуту, 7 - привод оптического прибор, 8 - устройство определения высоты, 9 - устройство определения угла визирования по углу места.
Для реализации заявляемого способа в ЭВМ ЦПУ 3 вводится цифровая карта местности (ЦКМ) (устройство определения высоты 8).
С помощью двухкоординатной РЛС 1 осуществляют обзор в заданном секторе и автоматическое обнаружение движущихся объектов на фоне подстилающей поверхности.
Полярные координаты обнаруженных объектов (R, α) поступают на устройство определения координат объектов 4 ЦПУ 3.
По известным прямоугольным координатам точки местоположения РЛС (Хрлс, Ypлc) и полярным координатам обнаруженных объектов (R, α) в устройстве 4 определяют их прямоугольные координаты (Хц, Yц).
По известным прямоугольным координатам точки местоположения оптического средства (Xoпт, Yoпт) и вычисленным координатам объектов (Хц, Yц) в устройстве 5 определяется угол визирования оптического средства по азимуту (αопт), полученное значение угла визирования используется для выдачи команды на привод наведения 7.
В устройстве 8, реализованом с использованием цифровой карты местности по известным прямоугольным координатам (Хопт, Yoпт) точки местоположения оптического прибора 2 и прямоугольным координатам объекта (Хц, Yц), определяют высоты этих точек над уровнем моря (Zoпт 1, Zц 1), добавляют к ним значение высоты центра объектива оптического прибора Zопт 2 и ожидаемое значение высоты центра объекта над уровнем подстилающей поверхности Zц 2 и определяют истинное значение высот:
Zц=Zц 1+Zц 2
Zопт=Zопт 1+Zопт 2.
По полученным значениям высот Zц, Zoпт и прямоугольным координатам местоположения оптического прибора Хопт, Yопт и уточненным прямоугольным координатам обнаруженного объекта Хц, Yц в устройстве 9 определяют угол визирования βопт на цель для наведения оптического средства в угломестной плоскости, например, по формуле:

Значение угла визирования βопт используют для выдачи команды на привод 7, в соответствии с которой осуществляют автоматическое наведение оптического средства 2 на обнаруженный объект в угломестной плоскости.
Применение заявляемого способа позволит обеспечить автоматическое обнаружение, а также визуальное наблюдение за обнаруженными объектами. Особое значение это приобретает в протяженных системах охраны (например границы), где наблюдение за объектом осуществляется с удаленного центрального пункта управления.
Связанные в протяженные системы отдельные комплексы типа "Страж" обеспечивают дистанционный сбор информации, распознавание типа нарушителя, слежения за ним на достаточно протяженной территории, при необходимости встраивание в систему охраны средств физической защиты.
Применение заявляемого способа позволяет с помощью малочисленного персонала обеспечить обнаружение вторжения нарушителей в охраняемую зону по земле или по воде на обширных территориях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ ПО КУРСУ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2308093C1 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ | 2003 |
|
RU2239766C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| СПОСОБ ПЕРЕХВАТА ВОЗДУШНЫХ ЦЕЛЕЙ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2012 |
|
RU2498342C1 |
| Способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, располагаемых на качающемся носителе | 2023 |
|
RU2816259C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2291371C1 |
| Способ стрельбы управляемым артиллерийским снарядом | 2017 |
|
RU2674401C2 |
| Способ управления летательными аппаратами по курсу в угломерной двухпозиционной радиолокационной системе | 2017 |
|
RU2660776C1 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2021 |
|
RU2773672C1 |
Изобретение относится к области разведки движущихся объектов с помощью радиолокационных и электронно-оптических средств и может быть использовано в скомплексированных радиолокационно-оптоэлектронных системах при разведке наземных и надводных объектов, а также в системах наблюдения за охраняемой территорией, акваторией в пограничной зоне. Технический результат заключается в возможности автоматического наведения оптического прибора по углу места с использованием косвенных данных - высоты земной поверхности над уровнем моря в точках местоположения цели и оптического прибора наблюдения. Способ наведения оптического прибора на обнаруженный объект по данным азимута и дальности двухкоординатной РЛС и известным прямоугольным координатам мест установки РЛС и оптического прибора, используя цифровую карту местности, определяют высоты земной поверхности над уровнем моря в точках обнаруженного с помощью РЛС объекта и установки оптического прибора, затем, добавляя к полученным значениям высот над уровнем моря ожидаемую высоту центра обнаруженного объекта и высоту центра объектива оптического прибора над уровнем земли соответственно, вычисляют высоту над уровнем моря центров обнаруженного объекта и оптического прибора и по полученным трехмерным координатам центра объекта и объектива оптического прибора вычисляют азимутальный угол и угол визирования на цель, которые используют для автоматического наведения оптического прибора на обнаруженный объект. 3 ил.

Способ наведения оптического прибора на обнаруженный объект по данным азимута и дальности двухкоординатной РЛС и известным прямоугольным координатам мест установки РЛС и оптического прибора, отличающийся тем, что, используя цифровую карту местности, определяют высоты земной поверхности над уровнем моря в точках обнаруженного с помощью РЛС объекта и установки оптического прибора, затем, добавляя к полученным значениям высот над уровнем моря ожидаемую высоту центра обнаруженного объекта и высоту центра объектива оптического прибора над уровнем земли соответственно, вычисляют высоту над уровнем моря центров обнаруженного объекта и оптического прибора и по полученным трехмерным координатам центра объекта и объектива оптического прибора вычисляют азимутальный угол и угол визирования на цель, которые используют для автоматического наведения оптического прибора на обнаруженный объект, при этом упомянутое вычисление азимутального угла объекта производят по известным прямоугольным координатам точки местоположения оптического прибора и вычисленным координатам объекта, а вычисление угла визирования на цель производят в соответствии с математическим выражением

где Хопт, Yопт, Zопт - трехмерные координаты центра объектива оптического прибора;
Хц, Yц, Zц - трехмерные координаты объекта.
| ЗАЙЦЕВ Н | |||
| Российские радары: на поле боя и охране рубежей | |||
| Военный парад | |||
| Способ и аппарат для получения гидразобензола или его гомологов | 1922 |
|
SU1998A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 1996 |
|
RU2131106C1 |
| US 6072571 A, 06.06.2000 | |||
| US 4710773, 01.12.1987 | |||
| Оптическая система для электрофотографических аппаратов | 1988 |
|
SU1605209A1 |
| В. В. ШИРИН | 0 |
|
SU276530A1 |

