Изобретение относится к акустическим системам, определяющим направление на источник мощных импульсных акустических сигналов. Преимущественная область использования - гидроакустика.
Известен гидроакустический пеленгатор по пат. США N 3042897, кл. 340-6, опубл. 3.07.62, БИ N 20, 1962, содержащий три акустических преобразователя, расположенных в вершинах разностороннего треугольника, соединенных каждый через фильтр, усилитель, детектор и формирователь с блоком регистрации. Принятые каждым преобразователем акустические сигналы фильтруются, усиливаются, детектируются и формируются в видеоимпульсы с крутыми передними фронтами. Направление на источник акустических сигналов определяют по времени запаздывания видеоимпульсов относительно друг друга.
Недостатками данного пеленгатора являются - малая точность пеленгации за счет размывания фронтов импульсных акустических сигналов при их распространении в поглощающих средах (вода, газы и т.д.), невозможность определения расстояния до пеленгуемого источника, необходимость поворота базы акустических преобразователей в направлении источника при больших значениях углов (более 30o) между осью базы и направлением на источник.
Более совершенным является пеленгатор по пат. ФРГ N 1807535, кл. G 01 S (НКИ 74d-6/13), опубл. 11.06.70, БИ N 24, 1970, содержащий протяженную группу акустических преобразователей, соединенных через компенсатор, высокочастотные фильтры и усилители с индикатором. Сигналы с преобразователей задерживаются компенсатором таким образом, чтобы они совпадали во времени, а затем после фильтрации и усиления поступают на индикатор. По величине задержки определяют направление на пеленгуемый источник.
Недостатками пеленгатора являются - невозможность определения расстояния до источника, ухудшение точности пеленгации при увеличении времени компенсации за счет увеличения ширины диаграммы направленности групп акустических преобразователей.
Наиболее близким техническим решением к заявляемому объекту является пеленгатор по пат. ФРГ N 2027940, кл. G 01 S 3/80, опубл. БИ N 7, 1977, содержащий две группы акустических преобразователей, соединенных через компенсатор со входами двух высокочастотных фильтров, выходы каждого из которых через усилитель и детектор соединены со входами вычитающего устройства, его выход соединен с индикатором, соединенным также с дополнительным выходом компенсатора. Каждая из групп акустических преобразователей имеет безлепестковую диаграмму направленности, сдвинутую относительно друг друга на некоторый угол. Сигналы с групп преобразователей проходят через компенсатор, поворачивающий в пространстве диаграммы направленности преобразователей, а затем каждый из них через последовательно соединенные высокочастотный фильтр, усилитель и детектор поступают на два вычитающего устройства, с выхода которого разностный сигнал поступает на индикатор, на второй вход которого с дополнительного выхода компенсатора подается напряжение, характеризующее угловое положение диаграммы направленностей преобразователей в пространстве, формируемое компенсатором. При приеме сигнала от какого-либо пеленгуемого источника (гидролокатор и т.д.) с помощью компенсатора поворачивают диаграммы направленности групп акустических преобразователей таким образом, чтобы равносигнальная ось данных групп совместилась с направлением на пеленгуемый источник. При этом сигналы, снимаемые с выходов детекторов, будут идентичны, и на выходе вычитающего устройства получаем нулевое напряжение, о чем свидетельствует информация, снимаемая с индикатора. При этом по величине напряжения, снимаемого с дополнительного выхода компенсатора, определяют направление на пеленгуемый источник.
Недостатками пеленгатора являются - малая точность пеленгования и невозможность определения расстояния до пеленгуемого источника.
Задачей изобретения является повышение точности пеленгования источника и определение расстояния до него.
Для достижения необходимого технического результата в акустический пеленгатор, содержащий две группы акустических преобразователей, соединенных с компенсатором, первый и второй выходы которого соединены с соответствующими входами цепочки из 2-х параллельно включенных каналов, содержащих последовательно соединенные полосовой фильтр с частотой настройки f, усилитель и детектор, выходы которых соединены с двумя входами вычитающего устройства, а выход последнего - с первым входом устройства отображения информации, второй вход которого соединен с дополнительным выходом компенсатора, дополнительно введены переключатель S1 и n-1 цепочка из 2-х параллельно включенных каналов, содержащих последовательно соединенные полосовой фильтр, усилитель и детектор, два входа которых соединены с соответствующими выходами компенсатора, а выходы - через переключатель S1 могут быть подключены к двум входам вычитающего устройства, причем фильтры настроены на частоты 2f, 3f,..., nf, где f - частота пеленгуемого акустического сигнала, а также n измерителей амплитуд сигналов с частотами f, 2f, 3f,..., nf, входы которых соединены с выходами детекторов вторых каналов, а выходы - соединены с решающим блоком, выход которого соединен с третьим входом устройства отображения информации.
В предлагаемое устройство дополнительно введены новые блоки: переключатель S1, n-1 цепочка из 2-х параллельно включенных каналов из последовательно соединенных полосового фильтров, усилителя и детектора и измерителей амплитуд сигналов с частотами f, 2f, 3f,..., nf и решающий блок, что в совокупности с введенными новыми связями позволяет повысить точность пеленгования и дает возможность определения расстояния до пеленгуемого источника.
На фиг. 1 показана структурная схема заявляемого устройства, на фиг. 2 - поясняется пеленгование методом равносигнальной зоны: а) пространственное положение диаграммы направленности (ДН) устройства; б) пеленгационные характеристики метода равносигнальной зоны на частотах f, 2f для предлагаемого устройства.
Акустический пеленгатор содержит две группы акустических преобразователей 1 и 2, соединенных с компенсатором 3. Первый и второй выходы компенсатора 3 соединены со входами 1-го и 2-го параллельно включенных каналов n-ных цепочек, содержащих последовательно включенные перестраиваемые полосовые фильтры 4 и 8, 11 и 14, ..., 17 и 20 с частотами настройки f, 2f, ..., nf, усилители 5 и 9, 12 и 15, ..., 18 и 21 и детекторы 6 и 10, 13 и 16,..., 19 и 22. Выходы каналов n-ных цепочек через переключатель S1 могут попарно соединяться с двумя входами вычитающего устройства 7, выход которого соединен с первым входом устройства отображения информации 26. Второй вход устройства отображения информации 26 соединен с дополнительным выходом компенсатора 3. n измерителей амплитуд сигналов 23, 24,..., 25 с частотами f, 2f, ..., nf подключены к выходам детекторов 10, 16,..., 22 вторых каналов соответствующих цепочек. Акустические сигналы с частотами 2f, 3f, ..., nf - высшие гармоники мощного локационного рабочего сигнала с частотой f измеряемого пеленгуемым источником, которые формируются в нелинейной водной среде распространения. Выходы всех измерителей амплитуд 23, 24,..., 25 соединены с решающим блоком 27, выход которого соединен с третьим входом устройства отображения информации.
Каждая из групп преобразователей 1, 2 имеет амплитудное распределение, например Дольфа-Чебышева или биномиальное (см. Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. -Л.: Судостроение, 1982, с. 84), компенсатор 3, стандартный блок, используемый в серийных шумопеленгаторах, а также может быть выполнен на электрически управляемых элементах временной задержки (см. Тюрин А.М., Сташкевич А.П., Таранов Э.С. Основы гидроакустики. -Л.: Судостроение, 1966, с. 193-209; Клещев А.А., Клюкин И.И. Основы гидроакустики. -Л.: Судостроение, 1987, с. 103-111).
В качестве измерителей амплитуды 23, 24,..., 25 могут использоваться пиковые вольтметры, регистрирующие наибольшие значения видеоимпульсных сигналов (см. Маграчев Э.В. Вольтметры одиночных импульсов. -М.: Энергия, 1967, например В4-6 (с. 101-104) и В4-8 (с. 104-107)). Блок 26 - устройство отображения информации - стандартный многофункциональный индикатор, используемый в выпускаемых нашей промышленностью шумопеленгаторных, рыбопоисковых и гидролокационных системах (см. Митько В.Б. и др. Гидроакустические средства связи и наблюдения. -Л.: Судостроение, 1982, с. 107-113; Кобяков Ю. С. и др. Конструирование гидроакустической рыбопоисковой аппаратуры. -Л.: Судостроение, 1986, с. 244-266). Решающий блок 27 - современная микропроцессорная система, осуществляющая вторичную обработку сигналов, т.е. определяющую параметры объектов поиска (дальности, угловых положений, скорости, направления движения и т.п.) (см. Кобяков Ю.С. и др. Конструирование гидроакустической рыбопоисковой аппаратуры. -Л.: Судостроение, 1986, с. 241-244). Остальные блоки акустического пеленгатора являются стандартными.
Работа акустического пеленгатора происходит следующим образом. Каждая группа акустических преобразователей 1 и 2 устройства имеет безлепестковую диаграмму направленности (ДН), которые сдвинуты друг относительно друга на некоторый угол 2ϕсм (фиг. 2), ϕсм≈ (0,5 - 0,7)2θ0,7 o, где 2θ0,7 - ширина ДН по уровню 0,7 группы преобразователей 1 или 2. Пеленгование методом равносигнальной зоны осуществляется путем определения разности напряжений ΔU = U1-U2 (точки 1, 2 или 1', 2' на фиг. 2,а) на выходах приемных трактов антенны (U1, U2, или U3, U4) при повороте диаграмм направленности компенсатором 3. Перестройка компенсатора 3 может осуществляться как оператором вручную, так и автоматически с последующим слежением за источником.
При нахождении цели на линии, проходящей через точку пересечения диаграмм направленности обоих групп акустических преобразователей и называемой линией равносигнального направления, сигналы обоих каналов равны (U1 = U2 или U3= U4) и напряжение U5 будет равно нулю, что и будет регистрироваться устройством отображения информации.
Напряжение U6, пропорциональное величине угла Δϕ с дополнительного выхода компенсатора 3, поступает на устройство отображения информации 26, которое индицирует информацию о угловой координате Δϕ пеленгуемого источника. В предлагаемом устройстве пеленгование осуществляется на нескольких акустических сигналах с кратными частотами f, 2f, ..., nf, что позволяет увеличить точность пеленгования. Пеленгационные характеристики метода равносигнальной зоны на частотах f, 2f для предлагаемого устройства представлены на фиг. 2, б.
Как видно из чертежа, крутизна пеленгационной характеристики Sn= dU(ϕ)/dϕ, а следовательно, и пеленгационная чувствительность максимальны при ориентации линии равносигнального направления на цель (в этом случае ΔU = 0), причем для сигнала второй гармоники 2f пеленгационная чувствительность выше. Это обусловлено большей разностью ΔU = U1-U2 для любого угла Δϕ отклонения от линии равносигнального направления, что определяется обострением ДН групп акустических преобразователей в режиме приема для более высокочастотного сигнала 2f. Это видно из фиг. 2,а - точки 1, 2 на ДН групп акустических преобразователей на частоте f (сплошная линия), точки 1', 2' на ДН групп акустических преобразователей на частоте 2f (пунктирная линия).
Угол Δϕmin, при котором оператор или автоматическое устройство уверено фиксирует наличие разницы в напряжениях U1 и U2, определяется выражением (см. Колчеданцев А.С. Гидроакустические станции. -Л.: Судостроение, 1982)
Δϕmin= 0,089μ(2θ0,7)2/ϕсм,
где 
При пеленговании оператором величина μ = 0,05 - 0,15 (визуальный индикатор) и μ ≥ 0,2 (слуховой индикатор); 2θ0,7 - ширина ДН антенны в режиме приема по уровню 0,7; Dn(ϕ) - аналитическое выражение для ДН антенны в режиме приема.
Таким образом, использование в акустическом пеленгаторе акустических сигналов f, 2f, ...3f, обрабатываемых в n двухканальных цепочках, содержащих последовательно включенные перестраиваемые полосовые фильтры (4, 8 - f; 11, 14 - 2f; ...; 17, 20 - nf), усилители (5, 9 - f; 12, 15 - 2f; 18, 21 - nf) и детекторы (6, 10 - f; 13, 16 - 2f; 19, 22 - nf) и затем подаваемых попарно через переключатель S1 на входы вычитающего устройства 7, позволяет осуществлять пеленгование источника методом равносигнальной зоны с требуемой точностью, возрастающей для более высокочастотных сигналов, что обусловлено уменьшением 2θ0,7 при возрастании частоты принимаемого сигнала. Количество n 2-канальных цепочек выбирают в пределах от 2 до 5. С выходов детекторов 10, 16,..., 22 видеоимпульсные сигналы U3 = U7, U8,...U9 поступают на входы измерителей амплитуд 23, 24,...25, регистрирующих амплитуды сигналов основной частоты f пеленгуемого источника и его высших гармоник 2f,..., nf в момент точного направления на источник излучения. По соотношению уровней сигналов U3= U7, U8, U9 с помощью решающего блока 27 определяют расстояние r до источника, затем полученная информация поступает на третий вход устройства отображения информации 26.
Для определения расстояния до пеленгуемого источника используются следующие теоретические предпосылки.
После излучения в реальную водную среду, обладающую нелинейностью, мощного гармонического локационного сигнала с амплитудой звукового давления P и частотой f, излучаемого пеленгуемым источником, будет происходить при распространении в среде его искажение синусоидальной формы заполнения вплоть до пилообразной (см. Мюир Т.Дж. Нелинейная акустика морских осадков. /Под ред. Хэмптона Л. -М.: Мир, 1977, с. 227-233), т.е. формируются высшие гормонические составляющие пеленгуемого сигнала конечной амплитуды с частотами 2f, 3f,..., nf, амплитуды звуковых давлений которых равны P2, P3,..., Pn.
Проведем вывод расчетных соотношений для вычисления дальности до пеленгуемого объекта с помощью 3-частотной модификации акустического пеленгатора, т.е. использующей для соответствующей обработки в решающем блоке 27 амплитуды видеоимпульсов U7, U8, U9, соответствующие амплитудам звуковых давлений P1, P2, P3 акустических сигналов основной частоты f и гармоник 2f, 3f, принятых первой группой акустических преобразователей.
В работе McDaniel O.H. Harmonic distortion of spherical sound waves in water "J Acoust. Soc. Amer., 1965, 38, N 4, P644 показано, что отношение уровней гармонических составляющих f, 2f, 3f равно

где k - параметр нелинейности (для воды k=7);
r - дальность распространения акустического сигнала;
βf - коэффициент затухания (неп/м) для частот f, 2f, 3f;
ρ - плотность среды распространения (для воды 1000 кг/м3);
c - скорость распространения (для воды около 1500 м/с);
Po - акустическое давление излучаемой акустической волны, приведенное к расстоянию ro (обычно принимает ro=1 м).
Находим из выражения (1) roPo и подставляет в выражение (2), получим
или
Приняв, что ro = 1 м, и преобразуя, получим, что
Пропотенцировав данное выражение, получаем транцендентное выражение относительно r
решаемое численными методами.
Ниже приведена программа для ЭЦВМ "Искра-1256" решения уравнения (3) методом половинного деления и представлены результаты решений для различных значений исходных параметров. Отсюда следует, что, зная значения параметров f, P1, P2 и P3, можно однозначно определить расстояние r до пеленгуемого источника. Процесс определения r легко выполняется автоматически с помощью современных микропроцессорных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2205421C1 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1999 |
|
RU2149424C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ И ПЕЛЕНГАТОР | 2010 |
|
RU2434240C1 |
| АКУСТИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1999 |
|
RU2158007C1 |
| АКУСТИЧЕСКИЙ ПЕЛЕНГАТОР | 2004 |
|
RU2274873C2 |
| УЛЬТРАЗВУКОВАЯ ЛИНИЯ ЗАДЕРЖКИ НА ОБЪЕМНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2000 |
|
RU2169429C1 |
| ПАРАМЕТРИЧЕСКИЙ АКУСТИЧЕСКИЙ ЛОКАТОР | 2002 |
|
RU2205420C1 |
| КОЛЛИНЕАРНЫЙ ОПТИЧЕСКИЙ ФИЛЬТР | 2002 |
|
RU2208825C1 |
| НЕКОЛЛИНЕАРНЫЙ ОПТИЧЕСКИЙ ФИЛЬТР | 2002 |
|
RU2208824C1 |
Изобретение относится к акустическим системам, определяющим направление на источник мощных импульсных акустических сигналов. Преимущественная область использования - гидроакустика. Для получения технического результата - повышения точности пеленгования источника и определения расстояния до пеленгуемого источника дополнительно введены переключатель S1 и n-1 цепочка из двух параллельно включенных каналов, содержащих последовательно соединенные полосовые фильтры 11 и 14, ..., 17 и 20, усилители 12 и 15, ..., 18 и 21 и детекторы 13 и 16, ..., 19 и 22, два входа которых соединены с соответствующими выходами компенсатора 3, а выходы через переключатель S1 могут быть подключены к двум входам вычитающего устройства 7, причем фильтры настроены на частоты 2f, 3f, ..., nf, где f - частота пеленгуемого акустического сигнала, а также n измерителей амплитуд 23, 24, ... 25 сигналов с частотами f, 2f, 3f, ..., nf, входы которых соединены с выходами детекторов 10, 16, ..., 22 вторых каналов соответствующих цепочек, а выходы соединены с решающим блоком 27, выход которого соединен с третьим входом устройства отображения информации 26. 2 ил.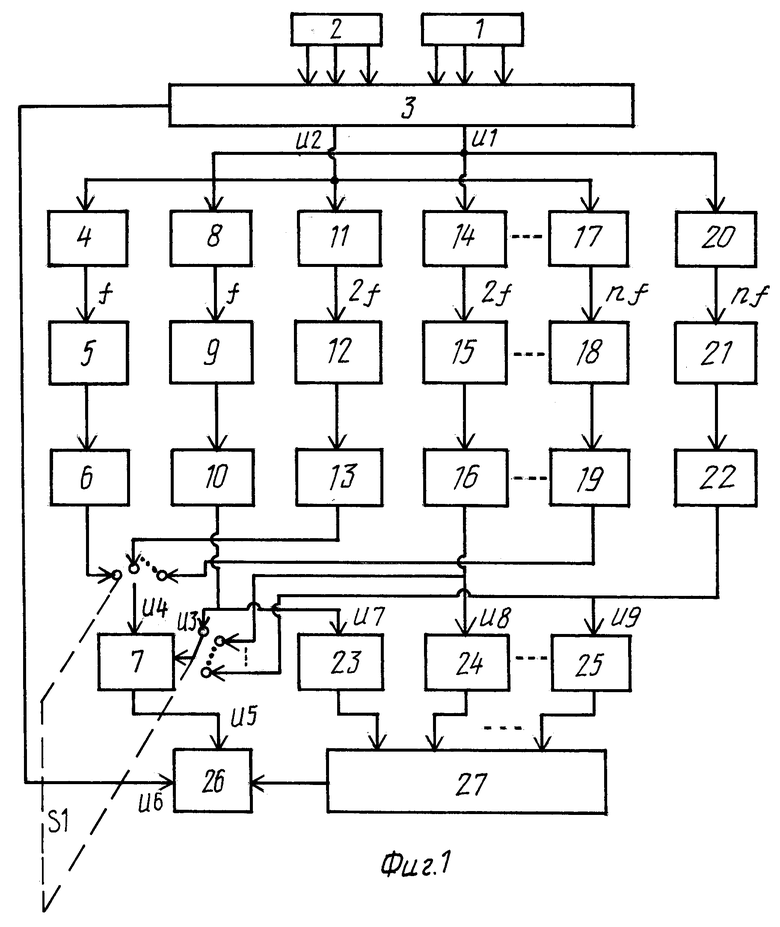
Акустический пеленгатор, содержащий две группы акустических преобразователей, соединенных с компенсатором, первый и второй выходы которого соединены с соответствующими входами цепочки из двух параллельно включенных каналов, содержащих последовательно соединенные полосовой фильтр с частотой настройки f, усилитель и детектор, выходы которых соединены с двумя входами вычитающего устройства, а выход последнего - с первым входом устройства отображения информации, отличающийся тем, что дополнительно введены две цепочки из двух параллельно включенных каналов, содержащих последовательно соединенные полосовой фильтр, усилитель и детектор; переключатель S1, три измерителя амплитуд сигналов с частотами f, 2 f, 3 f и решающий блок, причем оба полосовых фильтра в каждой из двух цепочек настроены соответственно на частоты 2 f и 3 f высших гармонических составляющих пеленгуемого акустического сигнала с частотой f, выходы каналов трех цепочек через переключатель S1 попарно соединяются с двумя входами вычитающего устройства, входы двух введенных двухканальных цепочек соединены с соответствующими выходами компенсатора, входы измерителей амплитуд сигналов с частотами f, 2 f, 3 f подключены к выходам детекторов вторых каналов соответствующих цепочек, а выходы соединены с решающим блоком, выход которого соединен с третьим входом устройства отображения информации.
| ПУЧОК ТРУБ ДЛЯ КАБЕЛЕПРОВОДОВ | 1992 |
|
RU2027940C1 |
| УСТРОЙСТВО для очистки КАМЕННЫХ МАТЕРИАЛОВ ОТ ЗАГРЯЗНЯЮЩИХ ПРИМЕСЕЙ | 0 |
|
SU348363A1 |
| US 4143351 A, 06.03.79 | |||
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |
| АКУСТИЧЕСКИЙ ИМПУЛЬСНЫЙ ЛОКАТОР | 1993 |
|
RU2050558C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2032187C1 |
