Изобретение относится к радиолокации и, в частности, к методам восстановления траектории цели в разнесенной радиолокации.
Известны различные способы восстановления траектории цели [1, 2]. В [1] рассмотрены методы определения координат целей в двухпозиционных радиолокационных системах. Одни из них используют импульсное зондирование и соответственно определение разности расстояний от цели до приемника и передатчика.
Однако в зоне наличия просветного эффекта, т.е. вблизи линии связи, эта разность мала и для ее определения требуется зондирование очень короткими импульсами.
Это сильно усложняет генерацию, последующую обработку эхо-сигнала и защиту от пассивных помех.
Другие методы предполагают раздельное измерение дальности от цели до передатчика и приемника и одного из пеленгов, либо суммы этих расстояний и доплеровского сдвига частоты.
Однако эти методы приводят к неоднозначности и появлению ложно-обнаруживаемых целей.
В [2, стр. 29] предложен применимый при бистатических углах локации, близких к 180o, способ определения параметров движения объекта, основанный на приеме в удаленной от источника излучения точке зондирующего сигнала и вторичного излучения объекта, выделении из них путем детектирования интерференционного сигнала биений, измерении моментов времени переходов его напряжения через нуль и вычислении на основании сделанных измерений параметров траектории. В этом способе параметры движения объекта, а именно скорость его движения, курс, координата точки излучения и приема, определяются по результатам измерений длительностей нескольких последовательных периодов интерференционного сигнала биений.
Указанный способ наиболее близок к предлагаемому по технической сущности и достигаемому результату и поэтому может быть использован в качестве прототипа.
Недостатком такого способа является невысокая точность получаемых оценок траекторных параметров и наличие неоднозначности определения этих параметров. Первое объясняется тем, что вблизи линии базы, где производятся измерения, поверхности положения (поверхности равных фаз или суммарных дальностей) представляют собой эллипсоиды, сильно вытянутые вдоль оси координат, параллельной линии базы. Наличие неоднозначности связано с симметрией эллипсоидов положения относительно перпендикулярной к базе плоскости, проведенной через ее середину. В связи с этим две различные траектории, симметричные относительно упомянутой плоскости, порождают одинаковые и неразличимые интерференционные сигналы биений.
Целью предлагаемого изобретения является повышение точности определения параметров движения объекта и устранение неоднозначности этих параметров за счет использования информации о направлении прихода интерференционного сигнала и времени перехода частоты биений этого сигнала через нуль.
Указанная цель достигается тем, что в радиолокационном способе определения параметров движения объекта, принятом за прототип, основанном на приеме в удаленной от источника излучения точке зондирующего сигнала и сигнала вторичного излучения объекта, выделении из их интерференционного сигнала биений (сигнал низкой частоты), измерении частоты этого сигнала, например путем измерения моментов времени переходов его напряжения через нуль, определяют момент времени, когда частота интерференционного сигнала переходит через нуль, а также одновременно определяют направление прихода интерференционного сигнала, например, амплитудным моноимпульсным способом или фазовым моноимпульсным способом, или путем сканирования лучом антенны [3], и по измеренным параметрам интерференционного сигнала (его частоте и направлению прихода) определяют параметры траектории объекта. Пространственные координаты объекта находятся как координаты точки пересечения поверхности равной суммы расстояний от передающей позиции до цели и от цели до приемной позиции (поверхность положения) и линии направления на цель из приемной позиции (линии пеленга).
Сопоставительный анализ с прототипом показывает, что заявленный способ отличается наличием новых операций и последовательностью остальных операций способа.
Сравнение заявленного способа с другими техническими решениями показывает, что отсутствуют технические решения с признаками, сходными с признаками, отличающими указанный способ от прототипа.
Для более полного понимания изложенной сущности заявляемого способа следует обратиться к нижеследующему описанию и чертежам, иллюстрирующим изобретение.
На фиг. 1 представлена функциональная схема устройства, осуществляющего способ определения параметров движения объекта, принятый за прототип, где обозначено:
1 - передняя позиция;
2 - антенна приемной позиции;
3 - приемное устройство;
4 - детектор;
5 - фильтр низкой частоты (ФНЧ);
11 - блок определения моментов времени переходов напряжения через нуль;
9 - блок вычисления траекторных параметров.
На фиг. 2 представлена функциональная схема устройства, осуществляющего заявляемый способ, где обозначено:
1 - передающая позиция;
2 - антенна приемной позиции (формирует два луча);
3 - приемное устройство;
4 - детектор;
5 - фильтр низкой частоты (ФНЧ);
6 - блок измерения направления прихода интерференционного сигнала;
7 - блок измерения доплеровской частоты;
8 - блок определения поверхности положения;
9 - блок вычисления траекторных параметров.
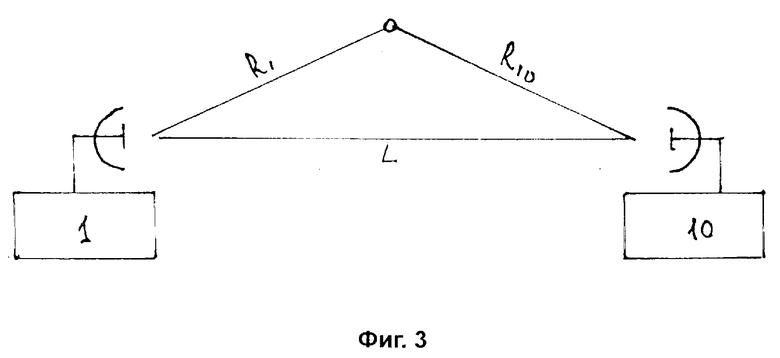
На фиг. 3 представлены основные геометрические соотношения для бистатической РЛС (БРЛС), где обозначено:
1 - передающая позиция;
10 - приемная позиция;
R1 - расстояние от цели до передающей позиции;
R10 - расстояние от цели до приемной позиции;
L - расстояние от передающей до приемной позиции.
На Фиг. 4 представлена качественная зависимость частоты интерференционного сигнала от времени при движении цели через зону обнаружения.
На Фиг. 5 представлена функциональная схема варианта реализации изобретения, где обозначения блоков соответствуют использованным на фиг. 2 - 4.
Предложенный способ будет понятен из рассмотрения работы устройства, изображенного на фиг. 2.
Известно [2, стр.30], что доплеровский сдвиг частоты (т.е. частота интерференционного сигнала) для двухпозиционной РЛС на пути передающая позиция - цель - приемная позиция описывается уравнением
Достаточно очевидно, что при приближении цели к базовой линии (линия L) частота Fд уменьшается и обращается в нуль в момент времени t = t0 нахождения цели на линии L. В этот момент функция RΣ(t) имеет минимальное значение, равное L. Из уравнения (1) следует, что
где RΣ - суммарное расстояние передатчик-цель-приемник;
λ - длина волны излучения;
t0 - момент времени перехода частоты интерференционного сигнала через нуль;
Fд - частота интерференционного сигнала;
L - расстояние между передающей и приемной позициями.
На фиг. 4 представлена качественная зависимость, полученная на выходе измерителя доплеровской частоты интеференционного сигнала при движении цели, пересекающей зону обнаружения бистатической РЛС (БРЛС). Сплошная линия соответствует случаю, когда измеритель не определяет знак Fд, а пунктирная линия, когда определяется знак Fд.
Выше показано, что в момент t0, когда Fд(1о) = 0, RΣ(to) = L. Таким образом
Если с момента обнаружения цели (t = 0) осуществлялось измерение Fд, то для любого момента, как предшествовавшего, t0, так и последующего, может быть определена величина RΣ(t). Эта величина, как известно [1], определяет поверхность положения в пространстве (эллипсоид) или линию положения (эллипс) на плоскости с фокусами в точке расположения передающей и приемной позиций.
Поскольку синхронно с измерением Fд осуществляется измерение пеленга на цель, то пространственные координаты цели определяются при пересечении линии пеленга и поверхности (либо линии) RΣ(t).
Если обнаружение и соответственно измерение доплеровской частоты и пеленга осуществляются дискретно во времени, то для определения координат могут быть использованы известные приближенные методы. Так, например, при эквидистантном во времени обнаружении могут быть использованы рекурентные соотношения:


где Δt - период обнаружения;
На фиг. 5 представлен вариант реализации изобретения, когда определение направления прихода интерференционного сигнала осуществляется путем сканирования лучом приемной антенны. В этом случае используется один приемный канал, антенна которого осуществляет сканирование по угловой координате со скоростью, при которой на выходе ФНЧ успевает сформироваться интерференционный сигнал. Определение направления прихода интерференционного сигнала осуществляется по максимуму огибающей сигнала на выходе ФНЧ, формируемой при сканировании луча.
Эффективность предложенного способа оценивалась путем математического моделирования системы, представленной на фиг. 2. Ширина парционального луча антенны принимались равной 10o. Блок измерения моделировался в виде набора доплеровских фильтров, перекрывающих диапазон изменения Fд. Ширина полосы пропускания отдельного фильтра около 10 Гц. Стандартные отклонения ошибок измерения пеленга и доплеровской частоты соответственно σϕ= 1°, σF= 3 Гц. Все приведенные выше параметры соответствуют характеристикам реально разрабатываемой и изготавливаемой в настоящее время БРЛС.
Моделирование дало следующие величины ошибок определения траекторных параметров цели σx и σy для различных скоростей цели и разных углов Ψ вектора скорости цели относительно базовой линии L (см. табл. 1 и 2).
Таким образом, моделирование показало возможность достижения достаточно высоких точностных характеристик траекторных параметров, особенно по координате y:
σx= 1+2 км,
σy= 20+120 м.
При этом имеет место однозначное измерение координат цели и не используется дополнительная вынесенная приемная позиция, то есть подтверждается достижение поставленной цели.
Литература
1. Теоретические основы радиолокации / Я.Д. Ширман, В.Н. Голиков, И.Н. Бусыгин и др. Под ред. Я.Д. Ширмана - М. Сов. Радио, 1970 - 560 с.
2. B. C. Черняк, Л.П. Заславский, Л.В. Осипов. Зарубежная радиоэлектроника, 1987, N 1, с. 29-30.
3. Справочник по радиолокации, т. 4. Пер. с англ. Под ред. С. Сколника - М: Сов. Радио, 1978, с. 375-376.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1999 |
|
RU2168740C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1997 |
|
RU2124220C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2154840C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2195683C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА С ЗАЩИТОЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2006 |
|
RU2324198C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2015 |
|
RU2584332C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| Радиолокационный способ обнаружения и определения параметров движения маловысотных малозаметных объектов в декаметровом диапазоне радиоволн | 2016 |
|
RU2669702C2 |




Изобретение относится к области радиолокации, в частности к методам восстановления траекторий цели в разнесенной радиолокации. Техническим результатом является повышение точности определения траектории движения объекта и устранение неоднозначности определения этих параметров за счет использования информации о направлении прихода интерференционного сигнала и времени перехода частоты биений этого сигнала через нуль. Пространственные координаты объекта находятся как координаты точки пересечения поверхности постоянной суммы расстояний от передающей позиции до цели и от цели до приемной позиции (поверхность положения) и линии направления на цепь из приемной позиции (линии пеленга). 5 ил, 2 табл.
Радиолокационный способ определения параметров движения объекта, основанный на приеме в удаленной от источника излучения точке зондирующего сигнала и сигнала вторичного излучения объекта, выделении из них путем детектирования интерференционного сигнала биений, измерении частоты этого сигнала, отличающийся тем, что при измерении частоты интерференционного сигнала одновременно определяют направление прихода интерференционного сигнала и момент времени, когда частота интерференционного сигнала переходит через нуль, после чего по измеренным величинам параметры траектории определяют как координаты точки пересечения линии направления прихода интерференционного сигнала и поверхности положения, определяемой по значениям частоты интерференционного сигнала и момента перехода этой частоты через нуль, из уравнения
где t - момент времени, для которого определяют координаты;
t0 - момент времени перехода частоты интерференционного сигнала через нуль;
FД - частота интерференционного сигнала;
λ - длина волны излучения;
ϕ,ε - угловые координаты объекта относительно приемной позиции;
R1, R10 - расстояние от передатчика до цели и от цели до приемника соответственно;
L - расстояние между передающей и приемной позициями.
| Черняк В.С., Заславский Л.П., Осипов Л.В | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ширман Я.Д | |||
| и др | |||
| Теоретические основы радиолокации | |||
| Справочник по радиолокации, т.4 / Под ред.С.Сколника, 1978, с.375 - 376. | |||

