Изобретение относится к области радиолокации, в частности к методам восстановления траектории цели в разнесенной радиолокации.
Известны различные устройства для определения параметров движения объекта в разнесенной радиолокации. Устройство, реализующее способ определения параметров движения цели (см.: патент N 2133480 по заявке 98101955/9), заявлено 02.02.98; МПК G 01 S 3/72. Радиолокационный способ определения параметров движения объекта содержит передающую позицию, излучающую монохроматический сигнал, и в удаленной от нее точке приемную позицию, содержащую приемное устройство, блок измерения направления прихода интерференционного сигнала, блок измерения доплеровской частоты, блок определения поверхности положения и блок вычисления траекторных параметров.
Основным недостатком данного устройства является невозможность определения местоположения цели до пересечения ею линии базы. Это обусловлено невозможностью измерения момента времени, когда частота интерференционного сигнала биений равна нулю до пересечения целью линии базы, поскольку этот момент времени соответствует непосредственному нахождению цели на линии базы, частота интерференционного сигнала биений при нахождении цели на этой линии равна нулю.
Указанного недостатка лишено устройство (см. патент РФ N 2124220, заявка 97117868 от 29.10.97, G 01 S 13/06). Устройство для определения параметров движения цели, которое содержит передающую позицию и в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, имеющим два и более парциальных каналов, каждый из которых состоит из последовательного соединения приемника, детектора и фильтра низких частот (ФНЧ), выходы последних соединены с соответствующими входами блока измерения направления прихода интерференционного сигнала и блока измерения доплеровской частоты, блока экстраполяции измеряемых параметров, блока вычисления момента времени пересечения целью линии базы и блока определения поверхности положения, выход которого соединен с одним из входов блока вычисления траекторных параметров, другой вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход является выходом всего устройства. Один из входов блока экстраполяции измеряемых параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход - с входом блока вычисления момента времени пересечения целью линии базы и одним из входов блока определения поверхности положения, другой вход которого соединен с выходом блока вычисления момента времени пересечения целью линии базы.
Недостатком данного устройства является ухудшение точности определения пеленга цели в случае увеличения количества парциальных каналов и сужения их диаграммы направленности для расширения зоны пеленгации, так как при увеличении количества парциальных каналов и сужения их диаграммы направленности опорное напряжение в каналах падает пропорционально их удалению от центрального канала, в котором оно максимально. Падение опорного напряжения приводит к искажению амплитудной информации в детекторе и, следовательно, к ошибкам в определении пеленга цели.
Предлагаемое устройство позволяет устранить указанный недостаток. Это достигается тем, что в устройство, взятое в качестве прототипа и содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, имеющим N (N>2) парциальных каналов, содержащих приемники, состоящие из линейной части, детектора и фильтра нижних частот, выходы которых соединены с соответствующими входами блока измерения направления прихода интерференционного сигнала и блока измерения доплеровской частоты, блока экстраполяции измеряемых параметров, блока вычисления момента времени пересечения целью линии базы и блока определения поверхности положения, выход которого соединен с одним из входов блока вычисления траекторных параметров, другой вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход является выходом всего устройства, один из входов блока экстраполяции измеряемых параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход - с входом блока вычисления момента времени пересечения целью линии базы и одним из входов блока определения поверхности положения, другой вход которого соединен с выходом блока вычисления момента времени пересечения целью линии базы, в центральный парциальный канал приемного устройства введен блок деления опорного напряжения, вход которого является одним из входов приемного устройства, а один из выходов непосредственно соединен с входом соответствующего приемника. В остальные N-1 парциальных каналов введены суммирующие устройства, один из входов которых является входом приемного устройства, а другой соединен с соответствующим выходом блока деления опорного напряжения. Выходы суммирующих устройств соединены с соответствующими приемниками. Кроме того, в устройство введен блок идентификации сигналов по частоте и вычитания ложных сигналов, вход которого соединен с выходом блока измерения доплеровской частоты, а выход - с одним из входов блока экстраполяции измеряемых параметров.
Расширение зоны пеленга путем увеличения количества парциальных каналов приводит к резкому ухудшению точности определения пеленга цели, а введение новых блоков и связей позволяет увеличить эту точность. Достигается это за счет распределения опорного напряжения, принятого центральным парциальным каналом, по каналам, где это напряжение мало или отсутствует совсем. Сигналы цели, принятые центральным каналом и являющиеся ложными для других каналов, устраняются при дальнейшей обработке после определения их доплеровской частоты.
На чертеже представлена функциональная схема заявляемого устройства с N парциальными каналами и введены следующие обозначения:
1 - передающая позиция;
2 - антенна приемной позиции;
3 - блок деления опорного напряжения;
4 - суммирующее устройство;
5 - приемник;
6 - блок измерения направления прихода интерференционного сигнала;
7 - блок измерения доплеровской частоты;
8 - блок идентификации сигналов по частоте и вычитания ложных сигналов;
9 - блок экстраполяции измеряемых параметров;
10 - блок вычисления момента времени пересечения целью линии базы;
11 - блок определения поверхности положения;
12 - блок вычисления траекторных параметров.
Предлагаемое устройство состоит из передающей позиции 1 и, в удаленной от источника излучения точке, приемной позиции, которая в свою очередь состоит из антенны 2 приемной позиции, имеющей N выходов, каждый из которых, кроме центрального, соединен с одним из входов соответствующего суммирующего устройства 4, выход которого соединен с приемником 5. Центральный выход антенны 2 соединен с блоком 3 деления опорного напряжения, один из выходов которого соединен непосредственно с входом приемника 5, а остальные N-1 выходы соединены с входами суммирующих устройств 4 соответствующих парциальных каналов. Выходы приемника 5 раздельно соединены с соответствующими входами блока 6 измерения направления прихода интерференционного сигнала и блока 7 измерения доплеровской частоты, выход которого соединен с входом блока 8 идентификации сигналов по частоте и вычисления ложных сигналов, выход которого в свою очередь соединен с одним из входов блока 9 экстраполяции измеряемых параметров. Второй вход блока 9 экстраполяции измеряемых параметров соединен с выходом блока 6 измерения направления прихода интерференционного сигнала, а выход - с входом блока 10 вычисления момента времени пересечения целью линии базы и одним из входов блока 11 определения поверхности положения, второй вход которого соединен с выходом блока 10 вычисления момента времени пересечения целью линии базы. Выход блока 10 соединен с одним из входов блока 12 вычисления траекторных параметров, второй вход которого соединен с выходом блока 6 измерения направления прихода интерференционного сигнала, а выход блока 12 вычисления траекторных параметров является выходом всего устройства.
Заявляемое устройство работает следующим образом.
Зондирующий непрерывный (немодулированный) сигнал излучается передающей позицией 1. Диаграмма направленности антенны передатчика имеет достаточно большую ширину по азимуту. Антенна 2 приемной позиции принимает прямой сигнал передающей позиции 1 и сигналы, отраженные от цели. В приемной позиции формируются N парциальных каналов, перекрытых по уровню половинной мощности. Прямой сигнал передатчика, принятый центральным парциальным каналом, делится в блоке 3 деления опорного напряжения и в соответствии с диаграммой направленности пропорционально подается в остальные N-1 парциальных каналов на суммирующие устройства 4, где складывается с сигналом, принятым соответствующим каналом. С выхода суммирующих устройств 4 и блока 3 деления опорного направления сигнал поступает на соответствующий приемник 5, где происходят детектирование и выделение низкочастотного колебания из суммарного сигнала, образуемого за счет интерференции прямого сигнала передатчика и сигнала, отраженного от цели.
Далее с выходов параллельных каналов низкочастотное колебание поступает в блок 7 измерения доплеровской частоты, где происходит измерение доплеровской частоты по частоте биений, образуемых при сложении отраженного от цели сигнала и прямого сигнала передатчика, и в блок 6 измерения направления прихода интерференционного сигнала, в котором определяется угловая координата цели путем сравнения амплитуд низкочастотного сигнала в каждом из парциальных каналов.
Рассмотрим возможность определения местоположения цели по измеренным значениям частоты Доплера и угловой координаты цели.
Известно (см. Черняк B.C., Заславский Л.П., Осипов Л.В. Зарубежная радиоэлектроника, 1987, N 1, с. 29-30), что доплеровский сдвиг частоты (то есть частота интерференционного сигнала биений) эхосигнала на трассе передающая позиция - цель - передающая позиция описывается уравнением
где RΣ(t) - суммарное расстояние передатчик - цель - приемник.
Величина RΣ определяет поверхность положения в пространстве (см. Справочник по радиолокации, т. 4 под ред. М. Сколника, М., Сов. Радио, 1978), которая представляет собой эллипсоид вращения с фокусами, расположенными в точках местоположения приемной и передающей антенн;
λ - длина волны излучения;
fд(t) - доплеровский сдвиг частоты.
Интегрируя (1) на интервале (t0, t), получим
где R0 - начальное (в момент времени t0 начальных траекторных измерений) значение RΣ(t0).
Если учесть, что в момент времени пересечения целью линии базы (tп) значение RΣ(t) известно точно и равно длине линии базы L, то для R0 из (2) получим следующее значение:
Подставив (3) в (2), получим
Согласно выражениям (4), (5) при t ≥ tп (после пересечения целью линии базы) оценку  суммарной дальности можно найти, интегрируя на интервале (tп, t) оценку
суммарной дальности можно найти, интегрируя на интервале (tп, t) оценку  доплеровской частоты принимаемого сигнала. При t < tп оценка
доплеровской частоты принимаемого сигнала. При t < tп оценка  на интервале (t, tп) неизвестна.
на интервале (t, tп) неизвестна.
При определении оценки  с использованием выражений (4), (5) момент tп пересечения целью линии базы точно не известен, так как при α = 0 доплеровский сдвиг частоты fд = 0 [это непосредственно следует из выражения (1)] и сигналы целей не наблюдаются в некоторой области малых значений fд (зоны режекции), в которой значения доплеровской частоты не превосходят ширины зоны режекции доплеровских частот приемного устройства. Зона режекции необходима для устранения отраженного сигнала от подстилающей поверхности и прямого сигнала передатчика.
с использованием выражений (4), (5) момент tп пересечения целью линии базы точно не известен, так как при α = 0 доплеровский сдвиг частоты fд = 0 [это непосредственно следует из выражения (1)] и сигналы целей не наблюдаются в некоторой области малых значений fд (зоны режекции), в которой значения доплеровской частоты не превосходят ширины зоны режекции доплеровских частот приемного устройства. Зона режекции необходима для устранения отраженного сигнала от подстилающей поверхности и прямого сигнала передатчика.
Поэтому вместо tп в выражениях (4), (5) необходимо использовать оценку  момента пересечения целью линии базы, которую можно найти как решение одного из уравнений
момента пересечения целью линии базы, которую можно найти как решение одного из уравнений  (t) = 0 или
(t) = 0 или  (t) = 0, где
(t) = 0, где  (t) и
(t) и  (t) - экстраполированные на зону режекции оценки измеряемых координат.
(t) - экстраполированные на зону режекции оценки измеряемых координат.
Подстановка в уравнение
оценки суммарной дальности  из (4), (5), вычисленной с помощью экстраполированных оценок
из (4), (5), вычисленной с помощью экстраполированных оценок  и оценки угловой координаты
и оценки угловой координаты  дает искомую оценку дальности до цели из приемной позиции
дает искомую оценку дальности до цели из приемной позиции 
С блока 7 измерения доплеровской частоты сигнал поступает в блок 8 идентификации сигналов по частоте и вычисления ложных сигналов, где происходит сравнение доплеровских частот сигналов, принятых центральным каналом, с частотами сигналов, принятых остальными парциальными каналами. Сигналы, частоты которых совпадают с частотой центрального канала, удаляются из дальнейшей обработки.
На основе данных, получаемых из блока 6 измерения направления прихода интерференционного сигнала и блока 8 идентификации сигналов по частоте и вычитания ложных сигналов, в блоке 9 экстраполяции измеряемых параметров осуществляется экстраполяция функциональных зависимостей частоты Доплера и направления прихода интерференционного сигнала от времени.
Рассмотрим кратко возможные алгоритмы экстраполяции, которые лежат в основе блока 9 экстраполяции измеряемых параметров. Будем полагать, что данные измерений fд и α поступают с выходов блока 8 идентификации сигналов по частоте и вычитания ложных сигналов и блока 6 измерения направления прихода интерференционного сигнала дискретно. Ошибки измерения будем считать независимыми.
При полиномиальной модели измерения описываемых параметров экстраполированные зависимости будут представляться в виде:
 = ck•tk + ck-1•tk-1 + ... + c0. (7)
= ck•tk + ck-1•tk-1 + ... + c0. (7)
Из уравнений (6), (7) видно, что для получения функциональных зависимостей частоты Доплера  и направления прихода интерференционного сигнала
и направления прихода интерференционного сигнала  от времени необходимо вычислить по нескольким измерениям α и fд коэффициенты ak и ck.
от времени необходимо вычислить по нескольким измерениям α и fд коэффициенты ak и ck.
Для примера остановимся на вычислении ak коэффициентов. В матричном виде уравнение (6) для нескольких измеренных значений α можно записать в виде
где

k - порядок полиномиальной модели;
α0 (t0), α1 (t1), ..., αk (tk) - величины измеряемых угловых коэффициентов в моменты времени t0, t1, ..., tk.
Вычисление оптимальных коэффициентов  в этой модели по критерию наименьших квадратов сводится к решению матричного уравнения
в этой модели по критерию наименьших квадратов сводится к решению матричного уравнения
Подобное вычисление оптимальных по критерию наименьших квадратов оценок коэффициентов полиномиальной модели для любого порядка "k" подробно описано в книге Сейдж Э., Меле Дж. "Теория оценивания и ее применение в связи и управлении", Связь, 1976.
Подставляя полученные значения коэффициентов в уравнения (6) и (7), получим функциональные зависимости  (t) и
(t) и  (t) на интервал времени, следующий за моментом времени последнего измерения входных данных.
(t) на интервал времени, следующий за моментом времени последнего измерения входных данных.
С блока 9 информация поступает в блок 10 вычисления момента времени пересечения целью линии базы, где на основе зависимостей  (t) и
(t) и  (t) приближенно определяется экстраполированный момент времени пересечения целью линии базы до пролета целью этой линии.
(t) приближенно определяется экстраполированный момент времени пересечения целью линии базы до пролета целью этой линии.
При нахождении цели на линии базы угловая координата α и частота Доплера fд равны нулю (см. Справочник по радиолокации, т. 4, под ред. Сколника, М., Сов. Радио, 1978), поэтому искомый момент времени согласно (6), (7) может быть найден из уравнений (t) = ak•tn,эk + ak-1tn,эk-1 +...+ a0 = 0, (10)
(t) = ak•tn,эk + ak-1tn,эk-1 +...+ a0 = 0, (10) (t) = ck•tn,эk + ck-1tn,эk-1 +...+ c0 = 0. (11)
(t) = ck•tn,эk + ck-1tn,эk-1 +...+ c0 = 0. (11)
Информация, полученная в блоке 9 экстраполяции измеряемых параметров и блоке 10 вычисления момента времени пересечения целью линии базы, поступает в блок 11 определения поверхности положения, где происходит определение поверхности положения.
Как видно из формул (4) и (5), блок 11 определения поверхности положения производит интегрирование входного напряжения с последующим масштабированием. Если данные измерений доплеровской частоты fд поступают дискретно через равные промежутки времени Δ, то формулы (4), (5) можно представить в виде
где n-й дискретный момент времени соответствует текущему значению времени t = in, в котором и производится оценка RΣn; m-й дискретный момент времени соответствует моменту времени пересечения целью линии базы tп = im. Таким образом, основной операцией данного блока в случае дискретных, измерений является суммирование входного напряжения.
Далее на основе данных, получаемых из блока 11 определения поверхности положения и блока 6 измерения направления прихода интерференционного сигнала, в блоке 12 вычисления траекторных параметров происходит определение траекторных параметров цели. Пространственные координаты цели однозначно находятся как координаты точки пересечения поверхности положения и линии направления на цель из приемной позиции (линии пеленга).
Предлагаемое изобретение легло в основу технического проекта нового изделия, который был успешно защищен перед заказчиком.
Литература
1. Патент 2133480 РФ, МПК 6 G 01 S 3/72. Радиолокационный способ определения параметров движения объекта / Бляхман А.Б., Самарин А.В. (РФ). - N 98101955/09; Заяв. 02.02.98; Опубл. 20.07.99, Бюл. N 20.
2. Патент 2124220 РФ, МПК 6 G 01 S 13/06. Устройство для определения параметров движения цели /Бляхман А.Б., Рындык А.Г., Ковалев Ф.Н. (РФ). - N 97117868/09; Заявл. 27.12.97; Опубл. 27.12.98, Бюл. N 36. (прототип).
3. В. С. Черняк, Л.П. Заславский, Л.В. Осипов. Зарубежная радиоэлектроника, 1987, N 1, с. 29-30.
4. Справочник по радиолокации, т. 4, Под ред. М. Сколника, М., Сов. Радио, 1978.
5. Сейдж Э., Меле Дж. Теория оценивания и ее применение в связи и управлении. Связь, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2154840C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1997 |
|
RU2124220C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2195683C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2015 |
|
RU2584332C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА С ЗАЩИТОЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2006 |
|
RU2324198C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2012 |
|
RU2515562C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 2013 |
|
RU2534220C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |
Изобретение относится к области радиолокации, в частности к методам восстановления траектории цели в разнесенной радиолокации. Технический результат - повышение точности определения пеленга в случае расширения зоны пеленгации за счет увеличения числа парциальных каналов. Для достижения вышеуказанного результата в устройство, взятое в качестве прототипа и содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, имеющим N парциальных каналов, содержащих приемники, выходы которых соединены с соответствующими входами блока измерения доплеровской частоты и блока измерения направления прихода интерференционного сигнала, блока экстраполяции измеряемых параметров, блока вычисления момента времени пересечения целью линии базы и блока определения поверхности положения, выход которого соединен с одним из входов блока вычисления траекторных параметров, другой вход блока вычисления траекторных параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход является выходом всего устройства, один из входов блока экстраполяции измеряемых параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход - с входом блока вычисления момента времени пересечения целью линии базы и одним из входов блока определения поверхности положения, другой вход которого соединен с выходом блока вычисления момента времени пересечения целью линии базы, в центральный парциальный канал введен блок деления опорного напряжения, вход которого является одним из входов приемного устройства, а один из выходов соединен непосредственно с соответствующим приемником. В остальные N-1 парциальных каналов введены суммирующие устройства, один из входов которых является входом приемного устройства, а другой соединен с соответствующим входом блока деления опорного напряжения. Выход каждого суммирующего устройства соединен с соответствующим приемником. Кроме того, в устройство введен блок идентификации сигналов по частоте и вычитания ложных сигналов, вход которого соединен с выходом блока измерения доплеровской частоты, а выход - с одним из входов блока экстраполяции измеряемых параметров. 1 ил.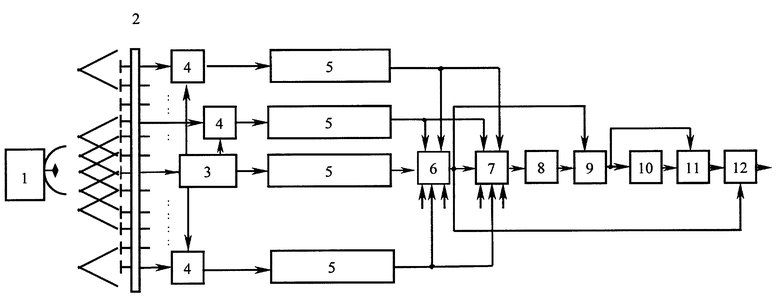
Устройство для определения параметров движения цели, содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, имеющим N парциальных каналов, выходы которых соединены с соответствующими входами блока измерения доплеровской частоты и блока измерения направления прихода интерференционного сигнала, каждый из N парциальных каналов состоит из приемника, и содержащую также блок экстраполяции измеряемых параметров, блок вычисления момента времени пересечения целью линии базы и блок определения поверхности положения, выход которого соединен с одним из входов блока вычисления траекторных параметров, другой вход блока вычисления траекторных парамтеров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход является выходом всего устройства, один из входов блока экстраполяции измеряемых параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход - с входом блока вычисления момента времени пересечения целью линии базы и одним из входов блока определения поверхности положения, другой вход которого соединен с выходом блока вычисления момента времени пересечения целью линии базы, отличающееся тем, что в центральной парциальный канал приемного устройства введен блок деления опорного напряжения, вход которого является одним из входов приемного устройства, а один из выходов соединен непосредственно с входом соответствующего приемника, в остальные N-1 парциальных каналов введены суммирующие устройства, один из входов которых является входов приемного устройства, а другой соединен с соответствующим выходом блока деления опорного напряжения, выход каждого суммирующего устройства соединен с соответствующим приемником, кроме того, в устройство введен блок идентификации сигналов по частоте и вычитания ложных сигналов, вход которого соединен с выходом блока измерения доплеровской частоты, а выход - с одним из входов блока экстраполяции измеряемых параметров.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1997 |
|
RU2124220C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| US 4806936, 21.02.1989 | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| US 5497161 A, 05.03.1996. | |||

